Спосіб релейного керування орієнтацією космічного апарату
Номер патенту: 15001
Опубліковано: 30.06.1997
Автори: Анупрієнко Генадій Єфремович, Карпачов Юрій Андрійович, Павловський Михайло Антонович
Формула / Реферат
Способ релейного управления ориентацией космического аппарата, заключающийся в формировании релейного сигнала по угловому отклонению, приложении к корпусу космического аппарата управляющего момента при наличии релейного сигнала, прикладывании к корпусу космического аппарата при первом цикле регулирования максимально возможного импульса ускорения, измерении длительности релейного сигнала t и сравнении t с установленной длительностью t , отличающийся тем, что управляющий момент формируют с помощью двигателя-маховика постоянного тока с постоянными магнитами, максимально возможный импульс ускорения создают за счет включения двигателя-маховика на максимальное напряжение Umax измеряют и запоминают скорость вращения маховика W1 и W каждый раз при появлении и исчезновении релейного сигнала, при новом появлении релейного сигнала устанавливают величину напряжения питания двигателя-маховика, равную ![]() ,
,
где К2 - коэффициент пропорциональности между относительной скоростью вращения маховика W и электродвижущей силой вращения E = K2 W ,a
![]()
где bт - коэффициент, зависящий от заранее задаваемого декремента затухания a ;
М0 - управляющий момент двигателя-маховика при нулевой относительной скорости маховика при предыдущем цикле регулирования;
ln - тангенс угла наклона моментной характеристики двигателя-маховика при предыдущем цикле регулирования, Wn и W1n - относительные скорости вращения маховика в конце и в начале предыдущего цикла регулирования;
W1 - относительная скорость вращения маховика в начале нового цикла регулирования;
tn - время длительности предыдущего цикла регулирования;
I и і - моменты инерции космического аппарата и маховика, при этом, если t >t , то включают двигатель-маховик на максимальное напряжение Umax как при первом появлении релейного сигнала.
Текст
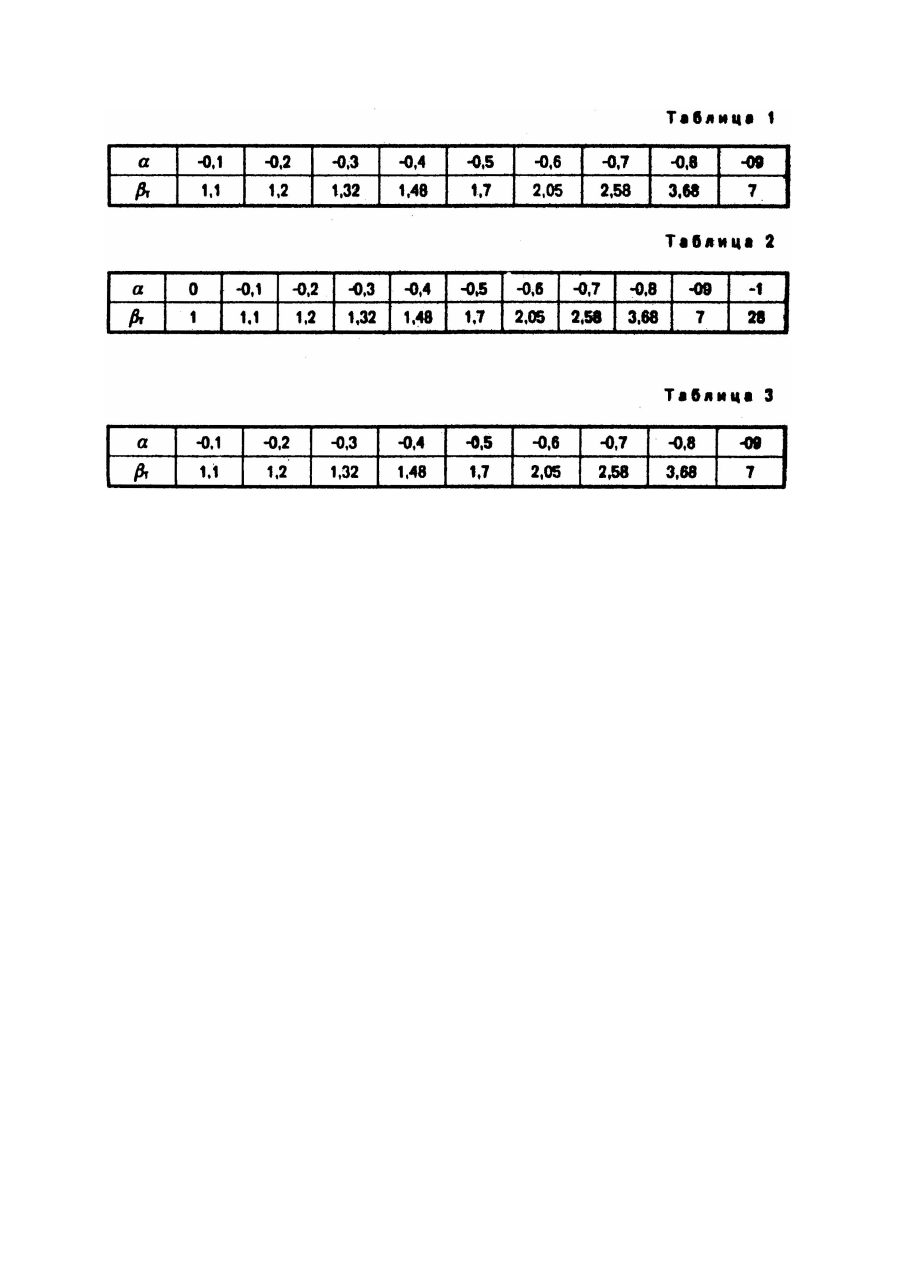
Изобретение относится к области ориентации и стабилизации космического аппарата, т.е. к управлению движением космического аппарата вокруг его центра масс и может быть использовано для улучшения характеристик переходного процесса (уменьшения декремента затухания), а также для расширения интервала демпфирования начальных угловых скоростей при релейном законе управления по угловому отклонению. Наиболее близким к заявляемому является способ релейного управления ориентацией космического аппарата, который основан на формировании релейного сигнала по угловому отклонению и приложении к корпусу космического аппарата уменьшающегося со временем управляющего момента при наличии релейного сигнала, при первом цикле регулирования прикладывают к корпусу космического аппарата максимально возможный импульс ускорения, каждый раз при появлении релейного сигнала измеряют его длительность и сравнивают с максимальной установленной для данного цикла управления длительностью управляющего момента, при каждом последующем появлении релейного сигнала максимально возможную величину полного импульса ускорения изменяют в зависимости от сравнения и соотношения между измеренной длительностью релейного сигнала и максимальной установленной для упомянутого цикла измерения длительностью управляющего момента. Недостатком способа-прототипа является то, что он основан на приложении к корпусу космического аппарата линейно уменьшающегося со временем управляющего момента, а есть целый вид наиболее экономичных и перспективных двигателей-маховиков, у которых управляющий момент линейно уменьшается не от времени, а от относительной скорости вращения маховика. К этому виду относятся бесколлекторные двигатели постоянного тока с постоянным возбуждением магнитного поля во включенном состоянии (например, с постоянными магнитами или с постоянным током обмоток возбуждения). Поэтому вышеупомянутая зависимость момента от скорости маховика не позволяет обеспечивать эффективное управление ориентацией космического аппарата без использования информации об этой скорости, как, например, у прототипа. В основу изобретения поставлена задача создания способа релейного управления ориентацией космического аппарата, который обеспечивал бы эффективное управление в части декремента затухания колебаний по скорости при использовании двигателей маховиков с линейной зависимостью управляющего момента от скорости вращения маховика. Поставленная задача достигается тем. что в известном способе релейного управления ориентацией космического аппарата, содержащего операции формирования релейного сигнала по угловому отклонению, например, с помощью релейного датчика ориентации, приложения к корпусу космического аппарата управляющего момента при наличии релейного сигнала, прикладывания к корпусу космического аппарата при первом цикле регулирования максимально возможного импульса ускорения, измерения длительности релейного сигнала и сравнения с установленной длительностью в отличии от прототипа управляющий момент формируют с помощью двигателя-маховика постоянного тока, например, с постоянными магнитами, максимально возможный импульс ускорения создают, например, за счет включения двигателя-маховика на максимальное напряжение измеряют и запоминают скорость вращения маховика и каждый раз при появлении и исчезновении релейного сигнала, при новом появлении релейного сигнала устанавливают величину напряжения питания двигателя-маховика, равную где - коэффициент пропорциональности между относительной скоростью вращения маховика и электродвижущей силой вращения где - коэффициент, зависящий от заранее задаваемого декремента затухания например, согласно табл.1. - управляющий момент двигателямаховика при нулевой относительной скорости маховика при предыдущем цикле регулирования, - тангенс угла наклона моментной характеристики двигателя маховика при предыдущем цикле регулирования, и относительные скорости вращения маховика в конце и в начале предыдущего цикла регулирования, - относительная скорость вращения маховика в начале нового цикла регулирования, время длительности предыдущего цикла регулирования, и - моменты инерции космического аппарата и маховика, при этом, если то включают двигатель-маховик на максимальное напряжение как при первом появлении релейного сигнала. Сущность предлагаемого способа подтверждается следующим математическим обоснованием. Уравнения вращательного движения космического аппарата, содержащего движущиеся массы, как известно, (например, Б.В. Раушенбах, Е.Н. Токарь. Управление ориентацией космических аппаратов. - М.: Наука, 1974. - С.152, формула (2.25) можно представить в следующей форме: где - осевые моменты инерции, центробежные моменты инерции; проекции угловой скорости космического аппарата на координатные оси и - проекции внешнего момента (например, управляющего момента от реактивных двигателей) на координатные оси, кинетического момента, - проекции движущихся масс космического аппарата на координатные оси (например, от вращающихся маховиков двигателей постоянного тока), точки над и означают первую производную от времени, Рассмотрим режим ориентации, когда реактивные двигатели не работают если оси и - главные оси космического аппарата выполняется режим ориентации при малых а, следовательно, можно принебречь произведениями qr, pr, pq из-за их малости. Тогда из уравнений (1) получаем Уравнения (2) представляют собой систему трех не связанных уравнений. Поэтому рассмотрим только одно уравнение движения, (Один канал управления), которое представим в следующем виде или с учетом (5) Дифференциальное уравнение (11) является дифуравнением с разделяющимися переменными, для решения которого делаем следующие преобразования в такой последовательности где и - время и относительная скорость вращения маховика в момент включения двигателя-маховика (в момент появления релейного сигнала по угловому отклонению); если принять то где - момент инерции космического аппарата, относительно оси управления, - момент инерции маховика двигателя постоянного тока, абсолютная скорость вращения космического аппарата вокруг оси управления, относительная скорость вращения маховика относительно оси, параллельной оси управления. Из (3) получаем Пусть управляющий момент при включении двигателя-маховика изменяется по закону где - момент при нулевой относительной Из уравнения (4), интегрируя левую и правую часть, получаем: вращения где индекс 1 соответствует моменту появления релейного сигнала по угловому отклонению. Из (13) с использованием (12) получаем маховика, - абсолютная величина тангенса угла наклона моментной характеристики. Вращающий момент с противоположным знаком прилагается одновременно к двум телам: маховику с моментом инерции и космическому аппарату с моментом инерции без учета маховика, т.е. с моментом инерции Для этих двух тел уравнения движения будут иметь вид Интегрируя правую и левую часть уравнения (14), получаем выражение для изменения угла отклонения с момента появления релейного скорости текущая вращения маховика относительная скорость сигнала где - абсолютная маховика, равная скорость вращения Уравнения (6) можно представить с учетом (7) еще в следующем виде: Сумма уравнений (8) дает также уравнение (4). Из второго уравнения (8) получаем а из (4) с учетом (9) При релейном управлении релейный сигнал исчезает, когда вновь т.е. становится равным Таким образом, используя (16) из уравнения (15) получаем следующую зависимость, где уже не текущее значение времени, а длительность существования релейного сигнала (от появления до исчезновения) некоторому значению, зависимому от величины или согласно 022), или согласно табл.1. Так, например, из табл.1 для получаем, что должно быть равно 1,7. Итак, если задано то, значит, известно Введем следующее обозначение С учетом (21) получаем выражение для тогда уравнения (17) и (14), где уже w равно абсолютной скорости вращения космического аппарата в момент исчезновения релейного сигнала, будут представлять следующую систему уравнений: Из уравнений (19) определяем длительность существования релейного сигнала, т.е. включенного состояния двигателя-маховика в данном цикле управления Подставляя (20) в (14) получаем уравнение которое связывает начальное (в начале цикле) и конечное (в конце цикла) значения угловой скорости космического аппарата величиной характеризующей двигатель-маховик во включенном состоянии в момент появления релейного сигнала, причем здесь даже учитывается относительная скорость маховика крутизна моментной величина пускового момента характеристики момент инерции маховика а также момент инерции космического аппарата вместе с моментом инерции маховика. Обозначив декремент затухания по угловой скорости как отношение а также введя обозначение (21) получаем следующее выражение зависимости от величину за счет изменения таких параметров двигателя как и/или необходимо знать моменты инерции маховика и космического аппарата относительно оси управления, а также определять две не постоянные во времени величины и - относительная скорость вращения маховика в моменты появления релейного сигнала, которая определяется непосредственным ее измерением в этот момент. абсолютная скорость вращения космического аппарата в момент появления релейного сигнала, которая при отсутствии прямого измерительного устройства (датчика угловой скорости, например, гироскопического типа) может быть определена косвенным путем следующим образом. В качестве абсолютной угловой скорости вращения космического аппарата в момент появления релейного сигнала по величине будем брать упомянутую скорость в момент исчезновении релейного сигнала в предыдущем цикле управления, т.к. между моментом исчезновения релейного сигнала и его новым появлением отсутствует процесс регулирования, который мог бы привести к существенным изменениям величины этой скорости. Из уравнения (20) получаем: Из уравнения (24) используя (13) и (18) получаем из С технической точки зрения цикл управления считается затухающим, если по абсолютной величине декремент затухания меньше единицы, что означает в нашем случае, что система возвращается в конце цикла к тому же угловому состоянию, как и в начале цикла, но с меньшей величиной угловой скорости изменения Таким образом, чтобы устанавливать перед каждым циклом регулирования требуемую в Используя (13) еще раз, из (25) получим выражение для абсолютной скорости космического аппарата в конце цикла регулирования: Для затухающего цикла диапазон от 0 до -1. Для этого диапазона в табл.2 представлена зависимость полученная из выражения (22). Таким образом, для обеспечения в цикле управления требуемого (например, выбранного) значения декремента затухания необходимо, чтобы в начале каждого цикла (каждого появления релейного сигнала) коэффициент был равен Таким образом, при известных значениях и измеренных значениях за цикл регулирования и можно определять абсолютную скорость вращения космического аппарата в конце существования релейного сигнала (в момент исчезновения релейного сигнала). Задавшись декрементом затухания можно выбрать, например, из табл.1 требуемое значение коэффициента (индекс означает требуемое значение). При новом появлении релейного сигнала, используя определенную из выражения (26) расчетную величину расчетное), можно величину (индекс определить означает расчетную Измерив при новом появлении релейного сигнала величину относительной угловой скорости маховика и используя выражения (18), получаем требуемое значение для нового цикла управления для обеспечения заданного декремента затухания. Или используя (26) с индексом означающим принадлежность измеряемых величин к предшествующему циклу регулирования, получаем требование к новой моментной характеристики двигателя-маховика (для нового цикла регулирования) непосредственно в следующем виде: Для двигателя постоянного тока, развиваемый им вращающий момент равен где и - постоянные коэффициенты, напряжение питания, - активное сопротивление постоянному току, - текущая относительная скорость вращения маховика, электродвижущая сила вращения. Из (30) следует, что а Отношение Таким образом, для обеспечения требуемого расчетного значения согласно (29), необходимо подавать на вход двигателя-маховика напряжение На основании вышеизложенного, предлагаемый способ состоит из следующих операций, выполняемых в такой последовательности: - формируют релейный сигнал по угловому отклонению, например, с помощью релейного датчика ориентации, при появлении релейного сигнала прикладывают к корпусу космического аппарата управляющий момент с помощью двигателямаховика постоянного тока, например, с постоянными магнитами; - при этом при первом появлении релейного сигнала (первый цикл регулирования) прикладывают к корпусу космического аппарата максимально возможный импульс ускорения, например, за счет включения двигателя-маховика на максимальное напряжение - измеряют длительность наличия релейного сигнала - сравнивают с установленной максимальной длительностью - измеряют и запоминают скорость вращения маховика и каждый раз при появлении и исчезновении релейного сигнала; - при новом появлении релейного сигнала устанавливают величину напряжения питания двигателя-маховика, равную где - коэффициент пропорциональности между относительной скоростью вращения маховика и электродвижущей силой вращения а - коэффициент, зависящий от задаваемого декремента затухания например, согласно табл.3. - управляющий момент двигателямаховика при нулевой относительной скорости маховика при предыдущем цикле регулирования; - тангенс угла наклона моментной характеристики двигателя-маховика при предыдущем цикле регулирования, и относительные скорости вращения маховика в конце и в начале предыдущего цикла регулирования; - относительная скорость вращения маховика в начале нового цикла регулирования; - время длительности предыдущего цикла регулирования; и моменты инерции космического аппарата и маховика; - при включают двигатель-маховик на максимальное напряжение как при первом появлении релейного сигнала. Последняя операция выполняется дім надежности на тот случаи, если процесс управления уже привел к включению двигателямаховика на напряжение меньшее, чем максимальное, но на космический аппарат оказало сильное воздействие какое-либо случайное непредвиденное возмущение или имело место сбои выполнения предлагаемого способа, например, из-за случайных, ошибок измерения или вычисления.
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod of two-position control of orientation of automatic spaceship
Автори англійськоюAnuprienko Hennadii Yefremovych, Karpachov Yurii Andriiovych, Pavlovskyi Mykhailo Antonovych
Назва патенту російськоюСпособ релейного управления ориентацией космического аппарата
Автори російськоюАнуприенко Геннадий Ефремович, Карпачев Юрий Андреевич, Павловский Михаил Антонович
МПК / Мітки
МПК: B64G 1/24
Мітки: спосіб, керування, космічного, апарату, орієнтацією, релейного
Код посилання
<a href="https://ua.patents.su/5-15001-sposib-relejjnogo-keruvannya-oriehntaciehyu-kosmichnogo-aparatu.html" target="_blank" rel="follow" title="База патентів України">Спосіб релейного керування орієнтацією космічного апарату</a>
Спосіб керування орієнтацією космічного апарату
Номер патенту: 3754
Опубліковано: 27.12.1994
Автор: Анупрієнко Генадій Єфремович
Мітки: спосіб, орієнтацією, керування, космічного, апарату
Формула / Реферат:
Способ управления ориентацией космического аппарата, включающий измерение углового отклонения ориентируемой оси космического аппарата от требуемого направления, определение моментов времени, в которые измеряемое угловое отклонение принимает экстремальные значения, изменение момента инерции космического аппарата в моменты времени, соответствующие экстремальным значениям углового отклонения и значениям углового отклонения, находящимся в зоне...
Спосіб формування заданого керуючого моменту при керуванні орієнтацією космічного апарату
Номер патенту: 12527
Опубліковано: 28.02.1997
Автор: Анупрієнко Генадій Єфремович
МПК: B64G 1/28
Мітки: спосіб, космічного, керуванні, моменту, орієнтацією, заданого, апарату, формування, керуючого
Формула / Реферат:
1. Способ формирования заданного управляющего момента при управлении ориентацией космического аппарата, содержащий операции сравнения измеряемой величины с заданной и релейной включение электромаховичного двигателя (ЭМД) в зависимости от результатов упомянутого сравнения, отличающийся тем, что в качестве измеряемой величины используют скорости вращения маховика ЭМД, а в качестве заданной' величины - измеряемую во времени по заданному...
Пристрій для керування рухом космічного апарату навколо центру мас
Номер патенту: 3991
Опубліковано: 27.12.1994
Автор: Анупрієнко Генадій Єфремович
МПК: B64G 1/24
Мітки: пристрій, керування, мас, апарату, космічного, рухом, центру
Формула / Реферат:
1. Устройство для управления движением космического аппарата вокруг центра масс, содержащее релейный гироскопический датчик угловой скорости, блок управления исполнительным органом и исполнительный орган, отличающееся тем, что в него введены генератор колебаний и устройство сравнения длительности или частоты сигналов релейного гироскопического датчика угловой скорости с длительностью полупериода или частотой генератора колебаний, релейный...
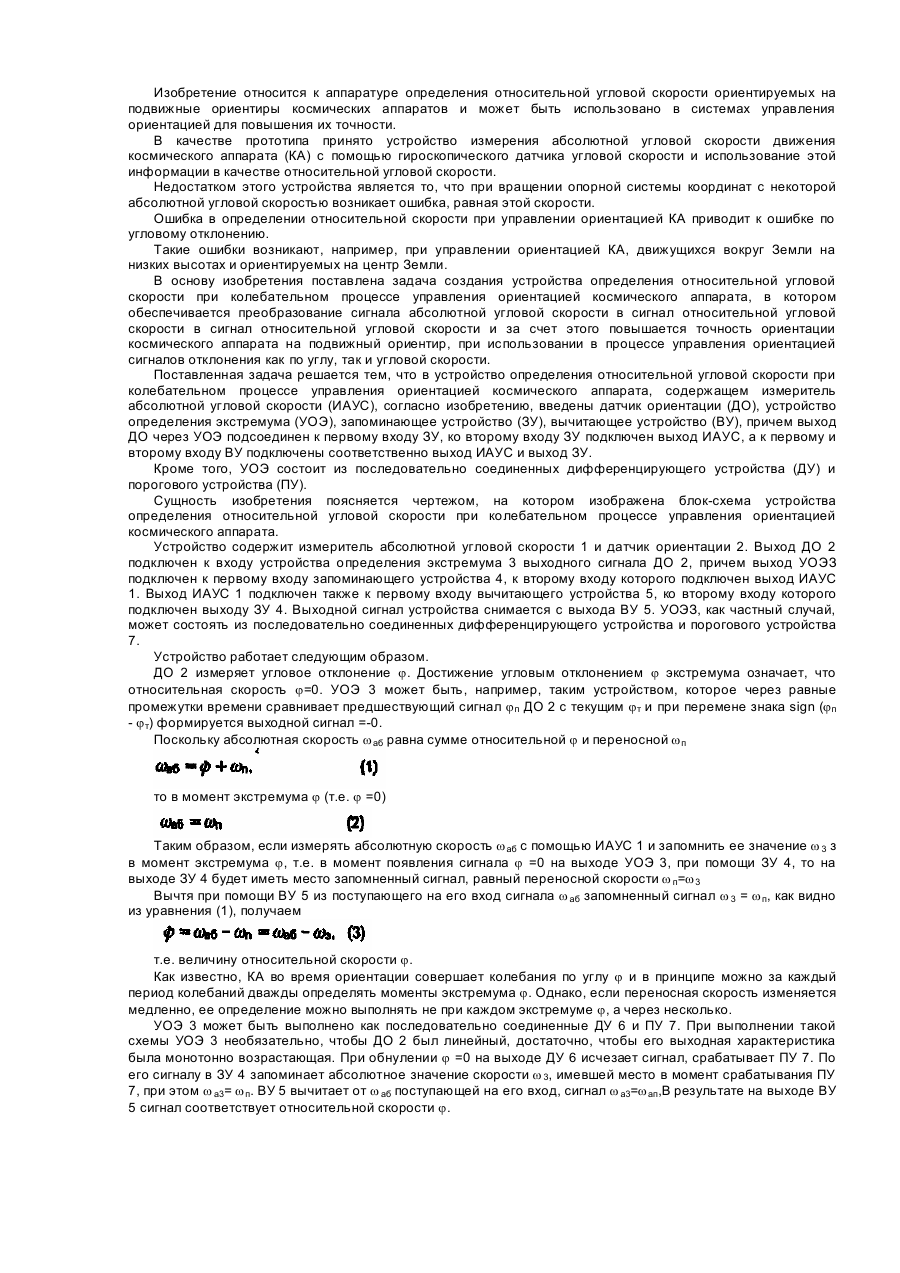
Пристрій для визначення відносної кутової швидкості при коливальному процесі управління орієнтацією космічного апарата
Номер патенту: 10788
Опубліковано: 25.12.1996
Автори: Карпачов Юрій Андрійович, Павловський Михайло Антонович, Анупрієнко Генадій Єфремович
МПК: B64G 1/24
Мітки: пристрій, процесі, відносної, орієнтацією, визначення, апарата, кутової, космічного, коливальному, управління, швидкості
Формула / Реферат:
1. Устройство определения относительной угловой скорости при колебательном процессе управления ориентацией космического аппарата, содержащее измеритель абсолютной угловой скорости, отличающееся тем, что введены датчик ориентации, устройство определения экстремума, запоминающее устройство и вычитающее устройство, причем выход датчика ориентации через устройство определения экстремума подсоединен к первому входу запоминающего устройства,...
Спосіб запуску космічного апарату з літака
Номер патенту: 13870
Опубліковано: 25.04.1997
Автори: Євгеньєв Володимир Сергійович, Сердюк Іван Іванович, Анупрієнко Генадій Ефремович, Уруський Олег Семенович, Павловський Михайло Антонович, Горбудін Володимир Павлович, Карпачов Юрій Андрійович, Зуєв Володимир Володимирович
Мітки: запуску, космічного, літака, спосіб, апарату
Формула / Реферат:
Способ запуска космического аппарата (КА) с самолета, содержащий операции доставки ракето-носителя КА, установленного на верхней части фюзеляжа самолета, в заданный район Земли на заданную высоту, выполнения при помощи самолета маневра для создания инерционных усилий отделения ракето-носителя КА от самолета и включения двигательной установки ракето-носителя КА на безопасном от самолета расстоянии, отличающийся тем, что во время отделения...
Попередній патент: Трансформатор струму
Наступний патент: Спосіб радикальної мастоектомії
Випадковий патент: Скло для товстоплівкових резисторів