Шасі робокара
Номер патенту: 18935
Опубліковано: 25.12.1997
Автори: Саленко Олександр Федорович, Загорянський Георгій Миколайович, Педченко Міхаіл Никифорович
Формула / Реферат
Шасси робокара, содержащее раму, размещенную на двух мостах со смонтированными на них парами колес, один из которых снабжен приводом поворота, и систему управления, отличающееся тем, что мосты механически соединены между собой связями, одна из которых расположена параллельно продольной оси рамы, а другая -диагональной к ней, а каждая связь состоит из двух частей, снабженных соединенными с системой управления фиксирующими элементами, выполненными с возможностью взаимодействия между собой, при этом оба моста шарнирно соединены с рамой, а рама и неприводной мост также снабжены упомянутым фиксирующим элементом.
Текст
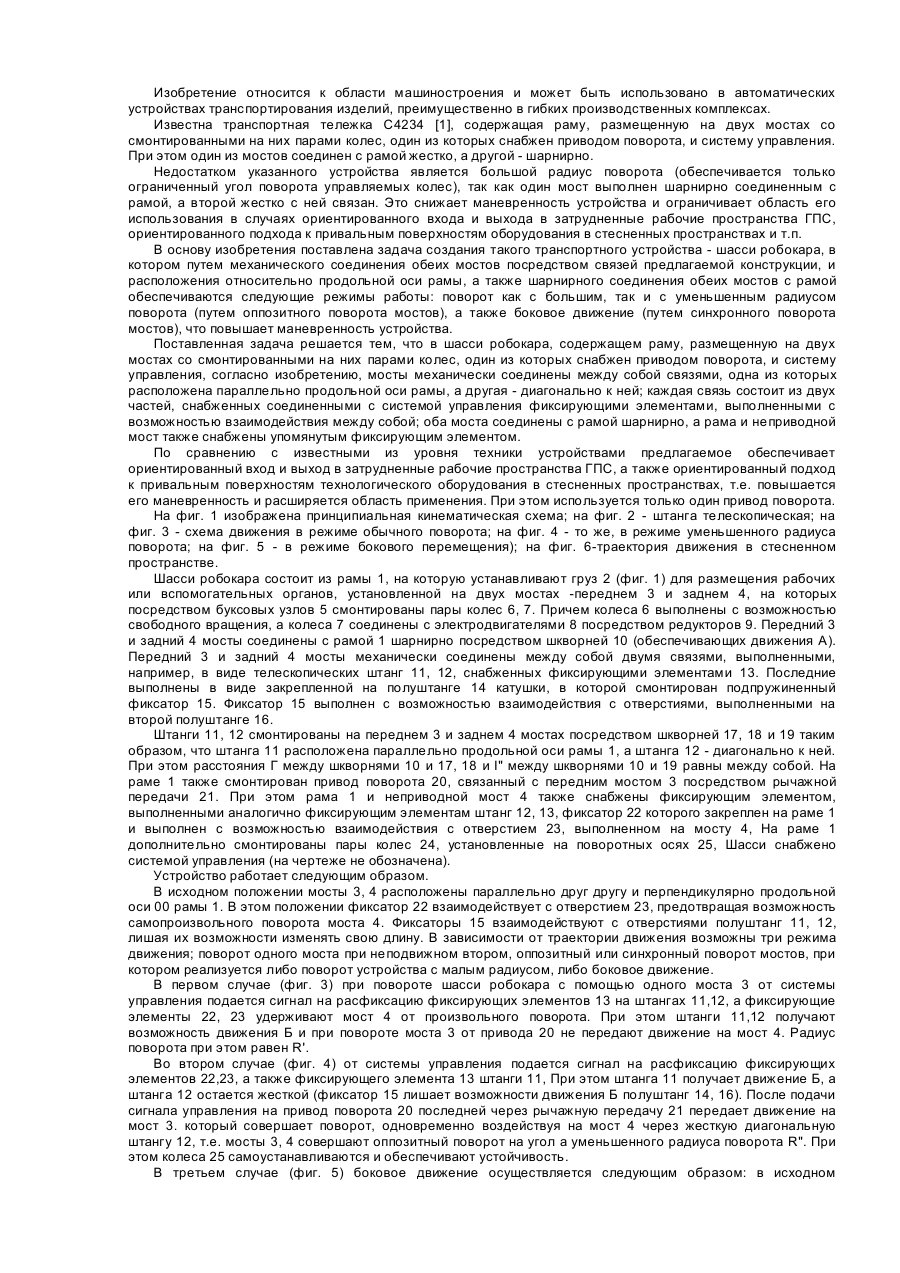
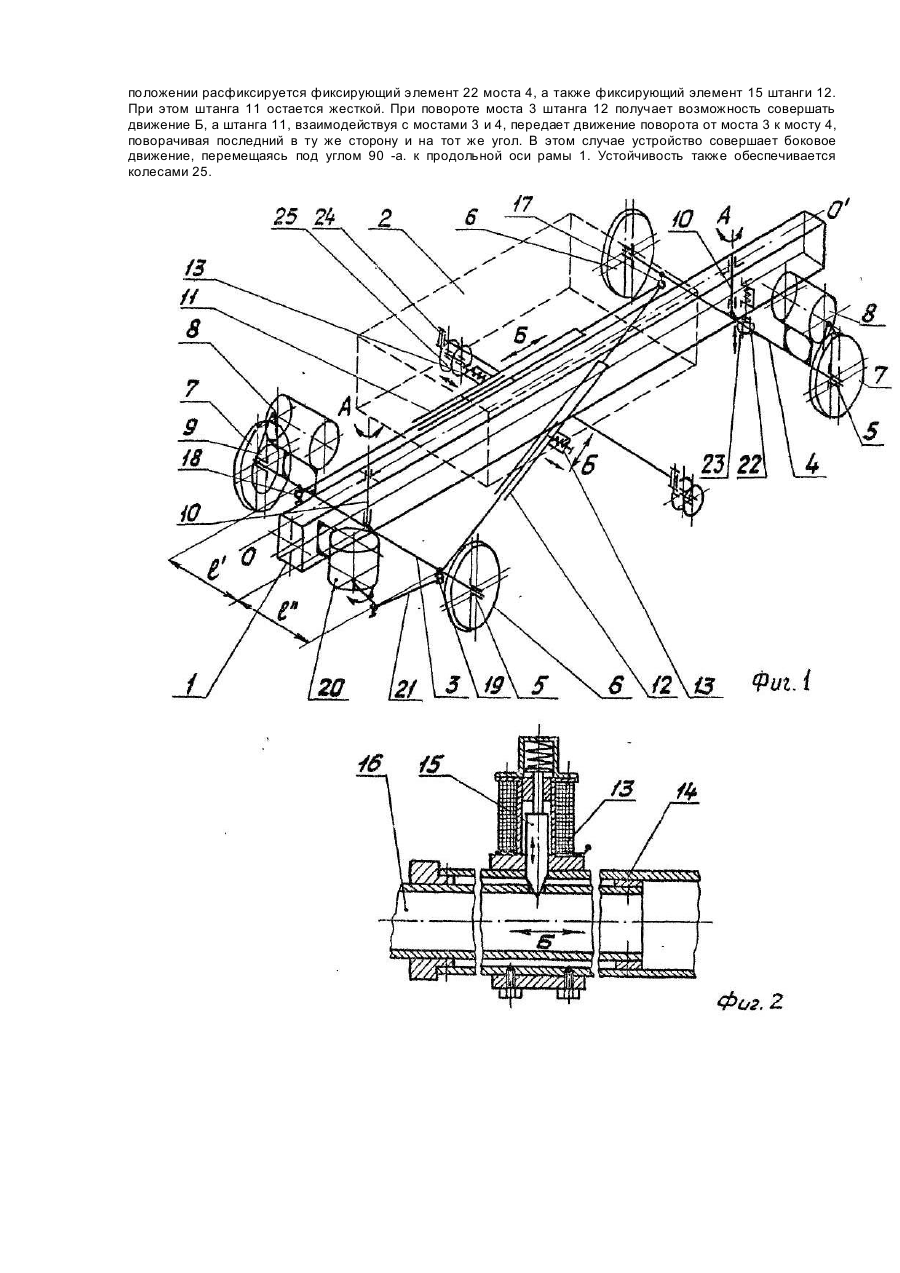
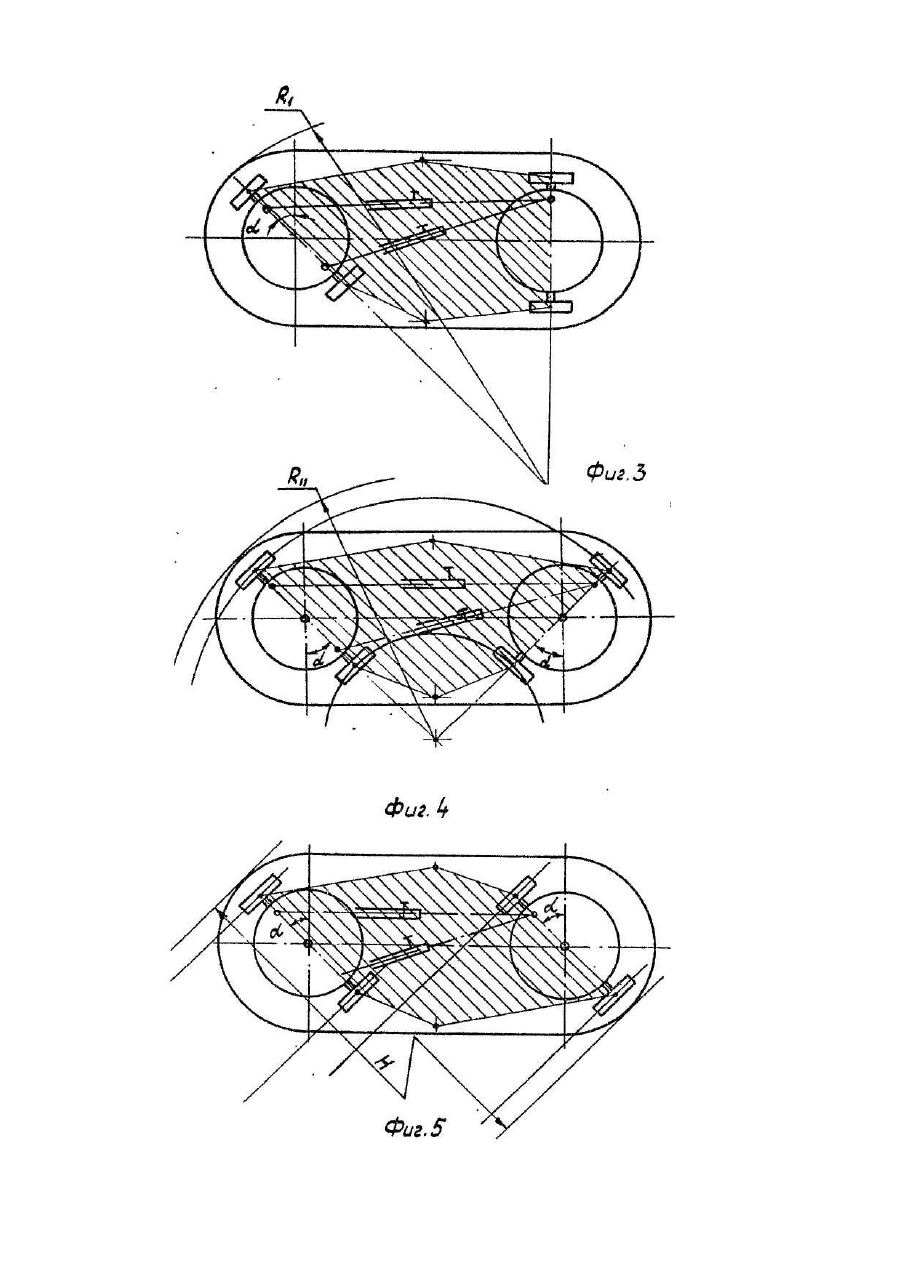
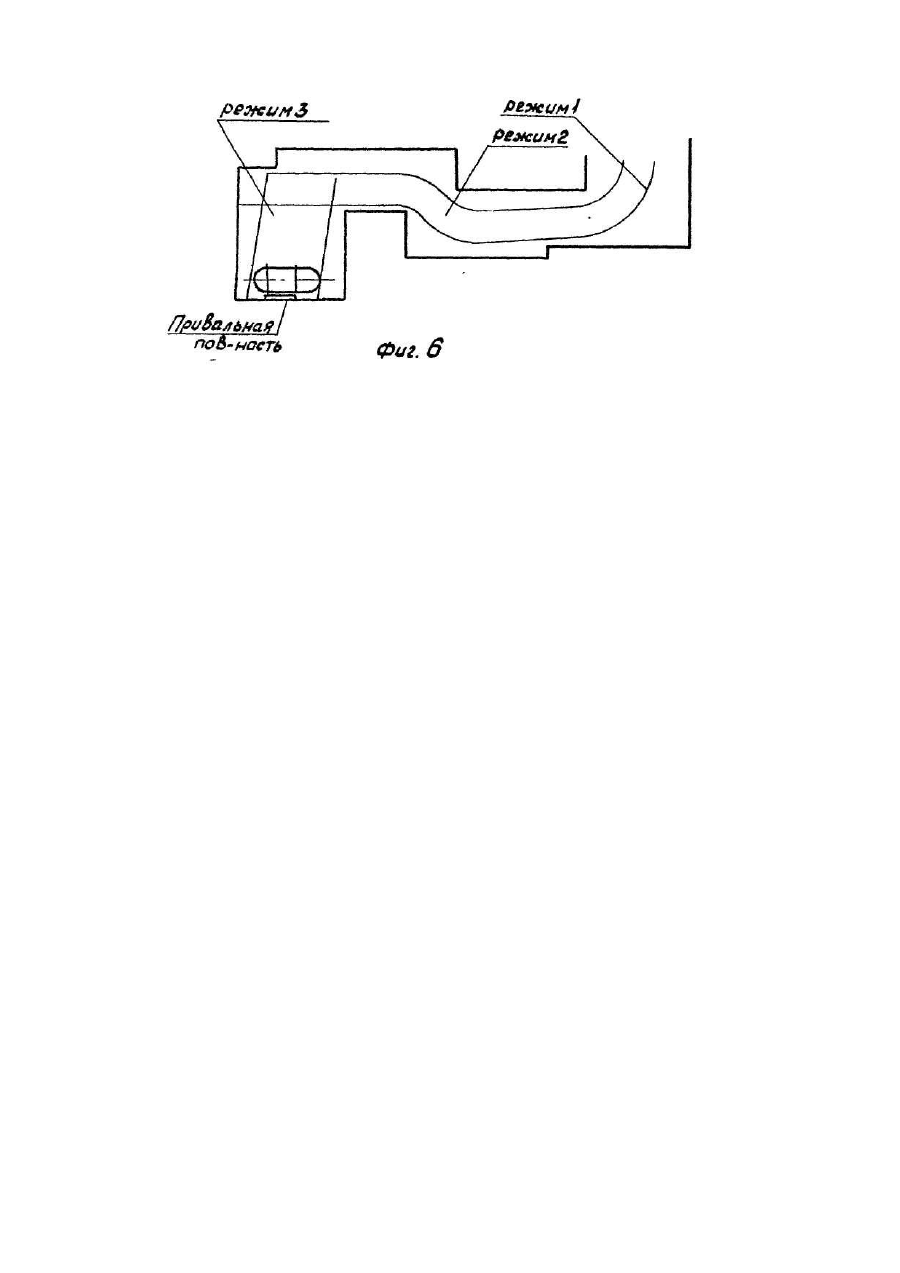
Изобретение относится к области машиностроения и может быть использовано в автоматических устройствах транспортирования изделий, преимущественно в гибких производственных комплексах. Известна транспортная тележка С4234 [1], содержащая раму, размещенную на двух мостах со смонтированными на них парами колес, один из которых снабжен приводом поворота, и систему управления. При этом один из мостов соединен с рамой жестко, а другой - шарнирно. Недостатком указанного устройства является большой радиус поворота (обеспечивается только ограниченный угол поворота управляемых колес), так как один мост выполнен шарнирно соединенным с рамой, а второй жестко с ней связан. Это снижает маневренность устройства и ограничивает область его использования в случаях ориентированного входа и выхода в затрудненные рабочие пространства ГПС, ориентированного подхода к привальным поверхностям оборудования в стесненных пространствах и т.п. В основу изобретения поставлена задача создания такого транспортного устройства - шасси робокара, в котором путем механического соединения обеих мостов посредством связей предлагаемой конструкции, и расположения относительно продольной оси рамы, а также шарнирного соединения обеих мостов с рамой обеспечиваются следующие режимы работы: поворот как с большим, так и с уменьшенным радиусом поворота (путем оппозитного поворота мостов), а также боковое движение (путем синхронного поворота мостов), что повышает маневренность устройства. Поставленная задача решается тем, что в шасси робокара, содержащем раму, размещенную на двух мостах со смонтированными на них парами колес, один из которых снабжен приводом поворота, и систему управления, согласно изобретению, мосты механически соединены между собой связями, одна из которых расположена параллельно продольной оси рамы, а другая - диагонально к ней; каждая связь состоит из двух частей, снабженных соединенными с системой управления фиксирующими элементами, выполненными с возможностью взаимодействия между собой; оба моста соединены с рамой шарнирно, а рама и неприводной мост также снабжены упомянутым фиксирующим элементом. По сравнению с известными из уровня техники устройствами предлагаемое обеспечивает ориентированный вход и выход в затрудненные рабочие пространства ГПС, а также ориентированный подход к привальным поверхностям технологического оборудования в стесненных пространствах, т.е. повышается его маневренность и расширяется область применения. При этом используется только один привод поворота. На фиг. 1 изображена принципиальная кинематическая схема; на фиг. 2 - штанга телескопическая; на фиг. 3 - схема движения в режиме обычного поворота; на фиг. 4 - то же, в режиме уменьшенного радиуса поворота; на фиг. 5 - в режиме бокового перемещения); на фиг. 6-траектория движения в стесненном пространстве. Шасси робокара состоит из рамы 1, на которую устанавливают груз 2 (фиг. 1) для размещения рабочих или вспомогательных органов, установленной на двух мостах -переднем 3 и заднем 4, на которых посредством буксовых узлов 5 смонтированы пары колес 6, 7. Причем колеса 6 выполнены с возможностью свободного вращения, а колеса 7 соединены с электродвигателями 8 посредством редукторов 9. Передний 3 и задний 4 мосты соединены с рамой 1 шарнирно посредством шкворней 10 (обеспечивающих движения А). Передний 3 и задний 4 мосты механически соединены между собой двумя связями, выполненными, например, в виде телескопических штанг 11, 12, снабженных фиксирующими элементами 13. Последние выполнены в виде закрепленной на полуштанге 14 катушки, в которой смонтирован подпружиненный фиксатор 15. Фиксатор 15 выполнен с возможностью взаимодействия с отверстиями, выполненными на второй полуштанге 16. Штанги 11, 12 смонтированы на переднем 3 и заднем 4 мостах посредством шкворней 17, 18 и 19 таким образом, что штанга 11 расположена параллельно продольной оси рамы 1, а штанга 12 - диагонально к ней. При этом расстояния Г между шкворнями 10 и 17, 18 и I" между шкворнями 10 и 19 равны между собой. На раме 1 также смонтирован привод поворота 20, связанный с передним мостом 3 посредством рычажной передачи 21. При этом рама 1 и неприводной мост 4 также снабжены фиксирующим элементом, выполненными аналогично фиксирующим элементам штанг 12, 13, фиксатор 22 которого закреплен на раме 1 и выполнен с возможностью взаимодействия с отверстием 23, выполненном на мосту 4, На раме 1 дополнительно смонтированы пары колес 24, установленные на поворотных осях 25, Шасси снабжено системой управления (на чертеже не обозначена). Устройство работает следующим образом. В исходном положении мосты 3, 4 расположены параллельно друг другу и перпендикулярно продольной оси 00 рамы 1. В этом положении фиксатор 22 взаимодействует с отверстием 23, предотвращая возможность самопроизвольного поворота моста 4. Фиксаторы 15 взаимодействуют с отверстиями полуштанг 11, 12, лишая их возможности изменять свою длину. В зависимости от траектории движения возможны три режима движения; поворот одного моста при неподвижном втором, оппозитный или синхронный поворот мостов, при котором реализуется либо поворот устройства с малым радиусом, либо боковое движение. В первом случае (фиг. 3) при повороте шасси робокара с помощью одного моста 3 от системы управления подается сигнал на расфиксацию фиксирующих элементов 13 на штангах 11,12, а фиксирующие элементы 22, 23 удерживают мост 4 от произвольного поворота. При этом штанги 11,12 получают возможность движения Б и при повороте моста 3 от привода 20 не передают движение на мост 4. Радиус поворота при этом равен R'. Во втором случае (фиг. 4) от системы управления подается сигнал на расфиксацию фиксирующих элементов 22,23, а также фиксирующего элемента 13 штанги 11, При этом штанга 11 получает движение Б, а штанга 12 остается жесткой (фиксатор 15 лишает возможности движения Б полуштанг 14, 16). После подачи сигнала управления на привод поворота 20 последней через рычажную передачу 21 передает движение на мост 3. который совершает поворот, одновременно воздействуя на мост 4 через жесткую диагональную штангу 12, т.е. мосты 3, 4 совершают оппозитный поворот на угол а уменьшенного радиуса поворота R". При этом колеса 25 самоустанавливаются и обеспечивают устойчивость. В третьем случае (фиг. 5) боковое движение осуществляется следующим образом: в исходном положении расфиксируется фиксирующий элемент 22 моста 4, а также фиксирующий элемент 15 штанги 12. При этом штанга 11 остается жесткой. При повороте моста 3 штанга 12 получает возможность совершать движение Б, а штанга 11, взаимодействуя с мостами 3 и 4, передает движение поворота от моста 3 к мосту 4, поворачивая последний в ту же сторону и на тот же угол. В этом случае устройство совершает боковое движение, перемещаясь под углом 90 -а. к продольной оси рамы 1. Устойчивость также обеспечивается колесами 25.
ДивитисяДодаткова інформація
Назва патенту англійськоюChassis of robot cart
Автори англійськоюSalenko Oleksandr Fedorovych, Zahorianskyi Heorhii Mykolaiovych
Назва патенту російськоюШасси робокара
Автори російськоюСаленко Александр Федорович, Загорянский Георгий Николаевич
МПК / Мітки
Код посилання
<a href="https://ua.patents.su/4-18935-shasi-robokara.html" target="_blank" rel="follow" title="База патентів України">Шасі робокара</a>
Малогабаритне самохідне шасі

Номер патенту: 17645
Опубліковано: 06.05.1997
Автор: Ткач Олександр Тимофійович
МПК: B62D 53/00
Мітки: самохідне, малогабаритне, шасі
Формула / Реферат:
Малогабаритное самоходное шасси, содержащее раму, на которой смонтированы кабина, двигатель и трансмиссия, передний мост с опорным узлом, задний мост, сменное навесное технологическое оборудование и механизм его привода, отличающееся тем, что рама состоит из двух балок П-образного профиля, соединенных меду собой опорным узлом переднего моста, выполненным в виде двух продольных швеллеров, жестко соединенных между собой пластинами, в нижней...
Шасі навантажувача
Номер патенту: 1443
Опубліковано: 25.03.1994
Автори: Худобородов Леонід Миколайович, Ославська Надія Миколаївна, Мандрик Володимир Олександрович, Руденький Михайло Вікторович, Козаренко Володимир Іванович, Харченко Віктор Лукич, Єременко Олег Федорович, Дольницький Ярема Богданович
МПК: E02F 9/02
Мітки: шасі, навантажувача
Формула / Реферат:
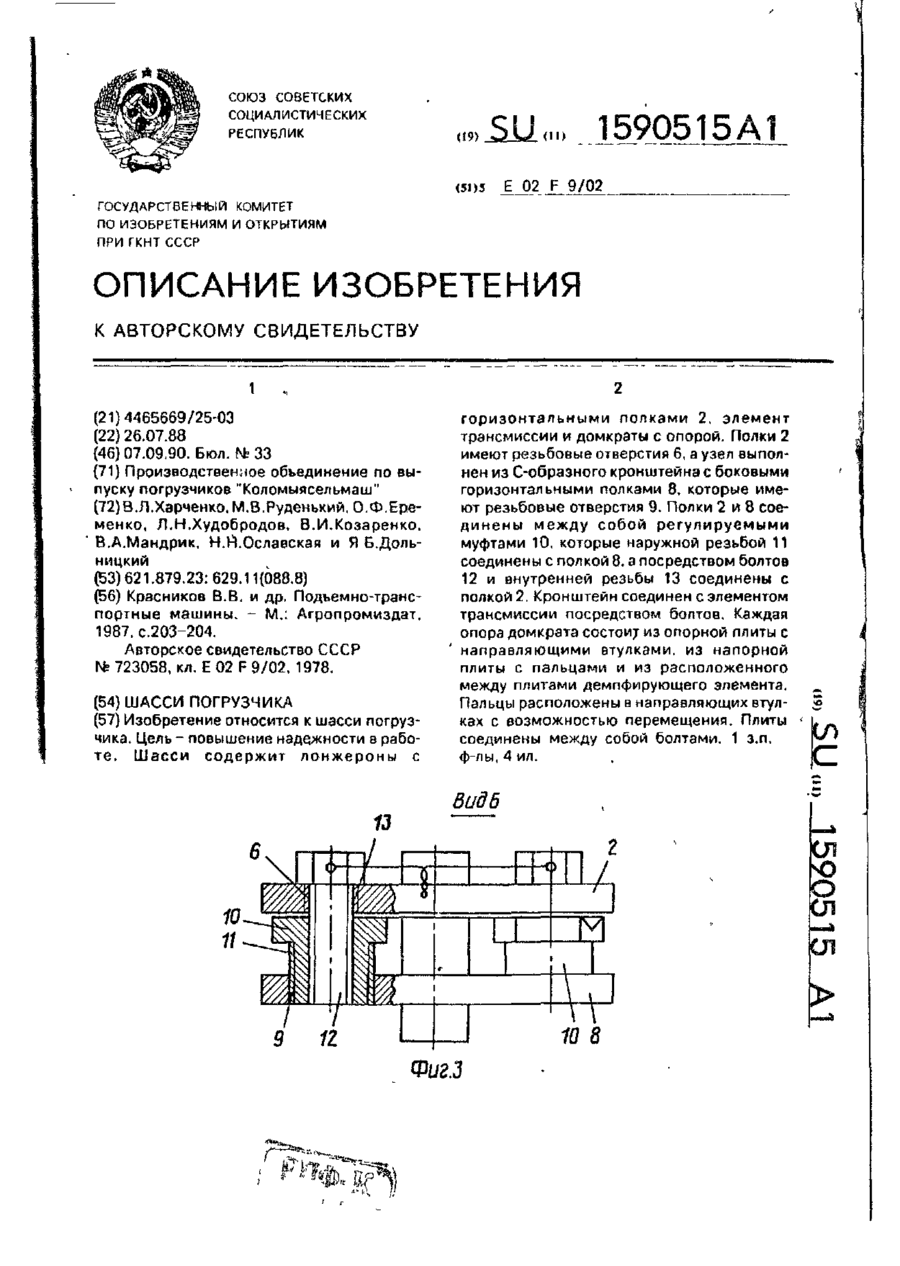
1. Шасси погрузчика, включающее лонжероны с горизонтальными полками и с узлами крепления элемента трансмиссии и соединенные с лонжеронами домкраты с опорами, отличающееся тем, что, с целью повышения надежности работы, горизонтальные полки лонжеронов имеют резьбовые отверстия, а узел крепления элемента трансмиссии выполнен из С-образного кронштейна с боковыми горизонтальными полками, которые имеют рсзьбоныс отверстия, и из регулируемых...
Головне шасі літака
Номер патенту: 6874
Опубліковано: 31.03.1995
Автор: Клімович Юрій Петрович
МПК: B64C 25/00
Формула / Реферат:
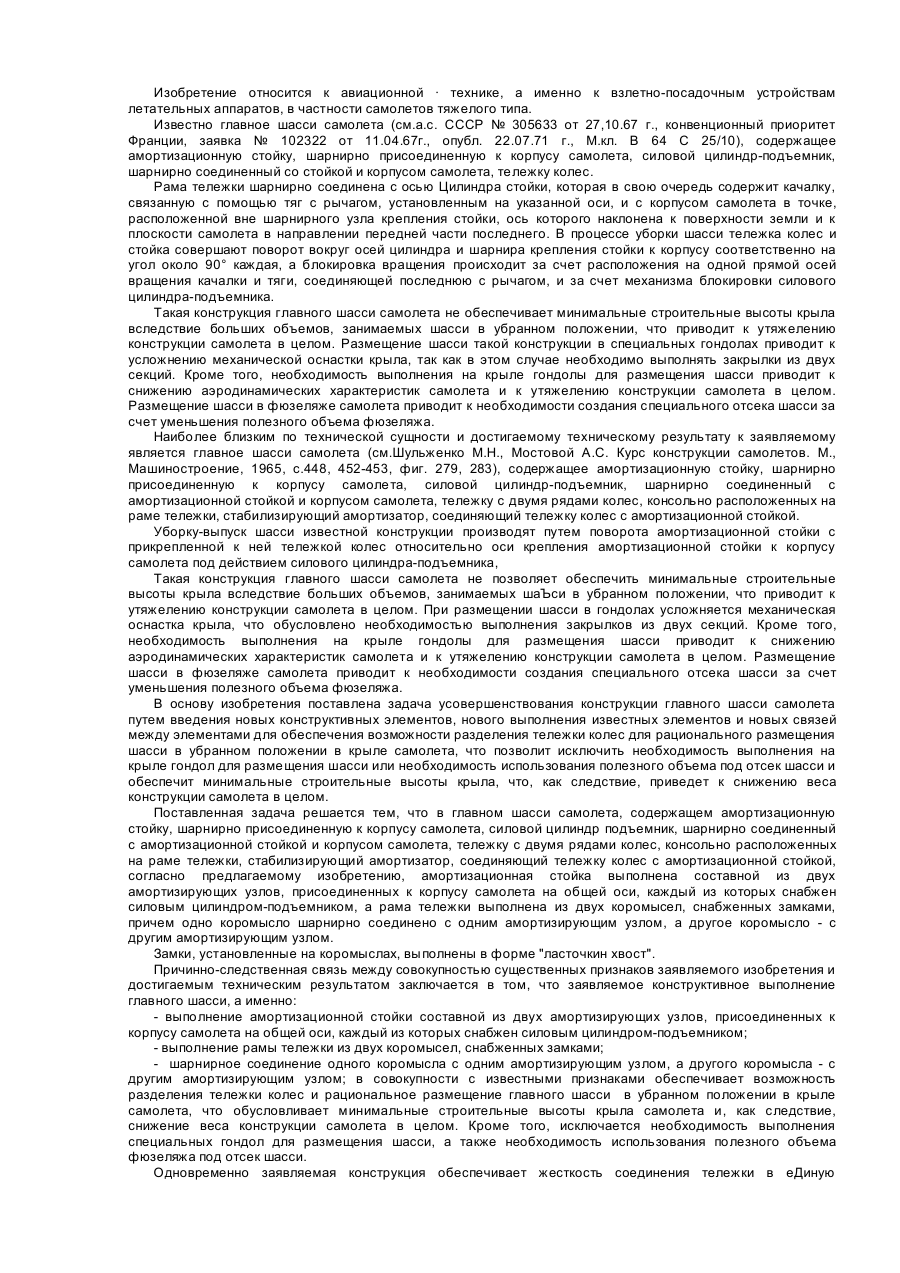
1. Главное шасси самолета, содержащее амортизационную стойку, шарнирно присоединенную к корпусу самолета, силовой цилиндр-подъемник, шарнирно соединенный с амортизационной стойкой и корпусом самолета, тележку с двумя рядами колес, консольно расположенных на раме тележки, стабилизирующий амортизатор, соединяющий тележку колес с амортизационной стойкой, отличающееся тем, что амортизационная стойка выполнена составной из двух амортизирующих...
Механізм навіски базового шасі для з’єднання з рамкою автозчеплення
Номер патенту: 4148
Опубліковано: 27.12.1994
Автор: Матюшкін Михайло Михайлович
МПК: A01B 59/00
Мітки: механізм, навіски, автозчеплення, базового, рамкою, шасі, з'єднання
Формула / Реферат:
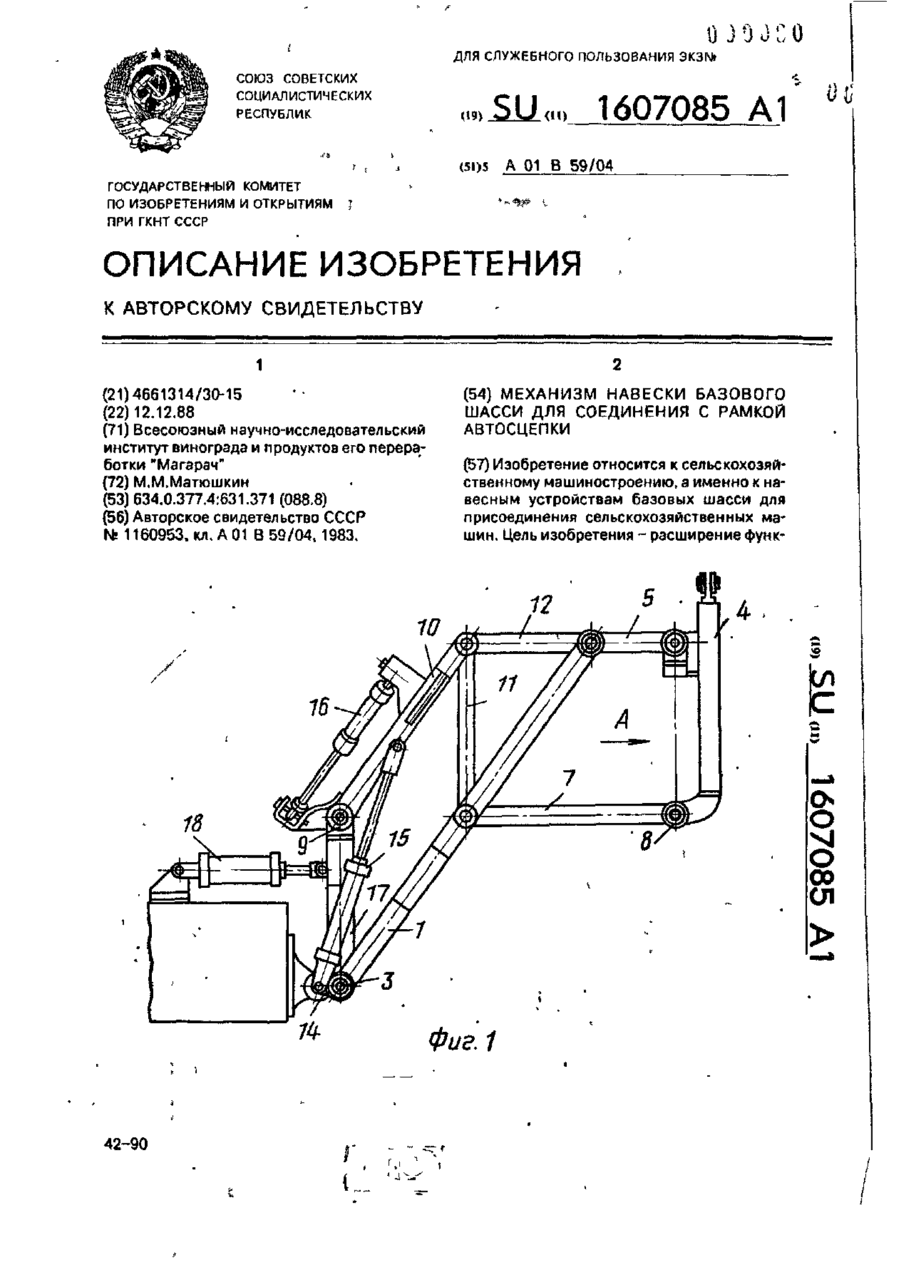
1. Механизм навески базового шасси для соединения с рамкой автосцепки, содержащий нижние тяги, одним концом шарнирно связанные с рамой шасси, верхние тяги, раскосы и подъемные рычаги с гидроцилиндром подъема, отличающийся тем, что, с целью расширения функциональных возможностей, механизм выполнен в виде двух пар последовательно расположенных шарнирных параллелограммов с общим вертикальным звеном в виде раскоса и снабжен дополнительными...
Бульдозер
Номер патенту: 3867
Опубліковано: 27.12.1994
Автори: Кушнір Юхим Абрамович, Глазман Борис Михайлович, Скрипковський Олексій Миколайович, Альперін Юхим Андрійович, Панченко Григорій Андрійович, Кумков Леонід Юрійович, Биков Олександр Володимирович, Зелюнко Сергій Володимирович
МПК: E02F 3/76
Мітки: бульдозер
Формула / Реферат:
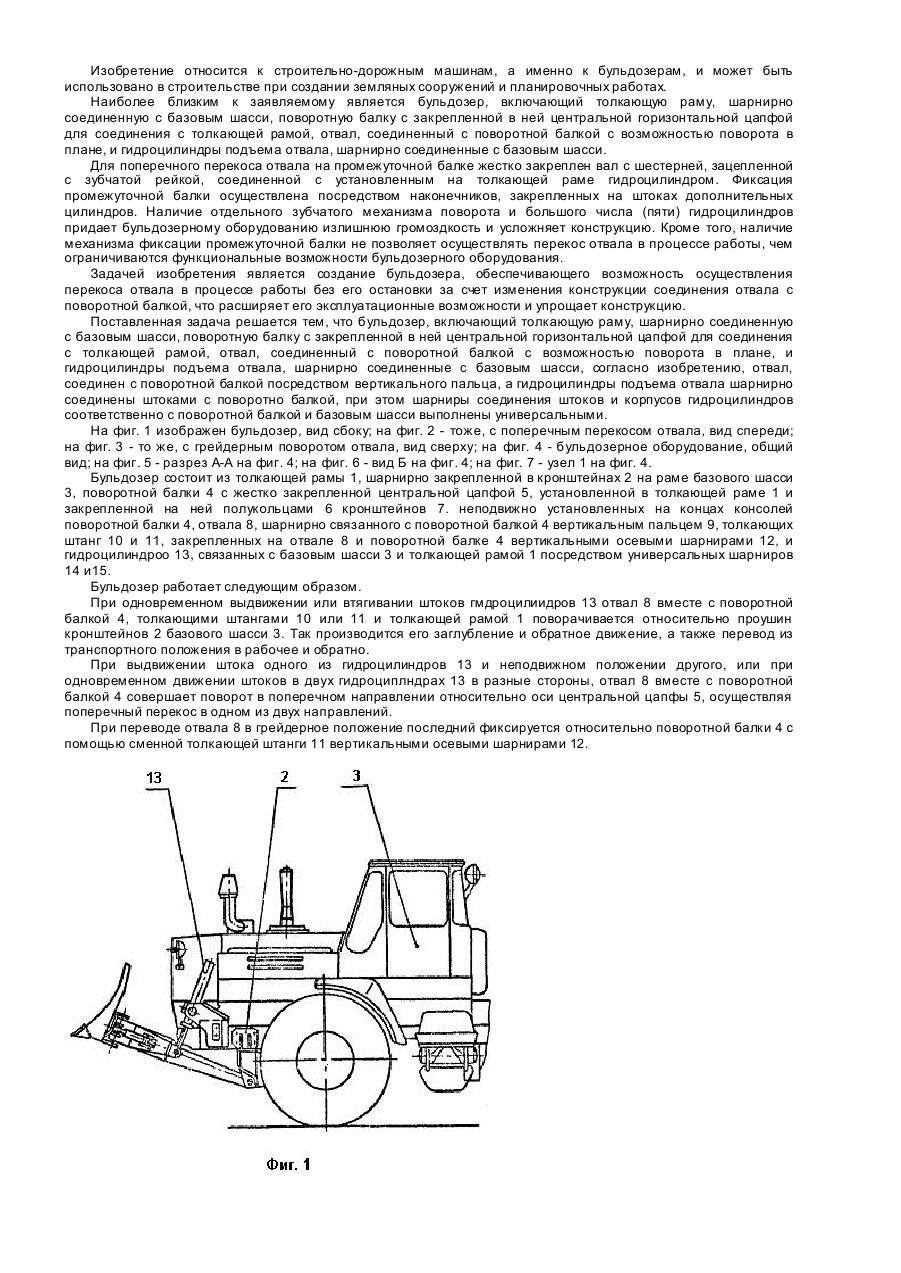
Бульдозер, включающий толкающую раму, шарнирно соединенную с базовым шасси, поворотную балку с закрепленной в ней центральной горизонтальной цапфой для соединения с толкающей рамой, отвал, соединенный с поворотной балкой с возможностью поворота в плане, и гидроцилиндры подъема отвала, шарнирно соединенные с базовым шасси, отличающийся тем, что отвал соединен с поворотной балкой посредством вертикального пальца, а гидроцилиндры подъема отвала...
Попередній патент: Спосіб генерування рентгенівського випромінювання
Наступний патент: Спосіб локального прогнозування збагачених ділянок золоторудних полів
Випадковий патент: Спосіб переробки металовмісних промислових та побутових відходів на фрагментовану шихту, установка для його здійснення та фрагментована шихта