Пристрій для дистанційного панорамування зйомочної камери
Номер патенту: 2837
Опубліковано: 26.12.1994
Автори: Тищенко Борис Борисович, Кокуш Анатолій Якимович, Горбаренко Григорій Васильович

Формула / Реферат
1. Устройство для дистанционного панорамирования съемочной камеры, содержащее панорамную головку в виде корпуса горизонтальной панорамы, расположенного с возможностью поворота на несущем валу посредством привода и жестко связанного с держателем с размещенным на нем механизмом вертикальной панорамы, вал которого связан с осью соответствующего привода и через укрепленный на нем узел вертикальной подвижки, содержащий свой привод, с платформой с узлом горизонтальной подвижки, содержащим свой привод, выполненный в виде кронштейна, причем узел горизонтальной подвижки со своим приводом размещен на опорной поверхности кронштейна, а также блок питания и электронный блок управления с индикатором балансировки и с коммутатором, связанным с приводами узлов вертикальной и горизонтальной подвижек, отличающееся тем, что, с целью повышения плавности вертикального панорамирования, оно снабжено дополнительным кронштейном, идентичным основному, и размещенным на его опорной поверхности дополнительным узлом горизонтальной подвижки со своим приводом, при этом дополнительный кронштейн укреплен на держателе симметрично основному относительно оси несущего вала.
2. Устройство по п. 1, отличающееся тем, что, с целью упрощения балансировки, ось привода механизма вертикальной панорамы дополнительно связана через введенный мультипликатор с осью введенного переменного резистора, подключенного к входу электронного блока управления, при этом мультипликатор и переменный резистор установлены на держателе, а в электронный блок дополнительно введены следящая мостовая схема, дифференциальный усилитель и силовая мостовая схема, причем переменный резистор включен в цепь следящей мостовой схемы, соединенной с индикатором балансировки через дифференциальный усилитель, выход которого дополнительно связан с силовой мостовой схемой, подключенной к коммутатору.
Текст
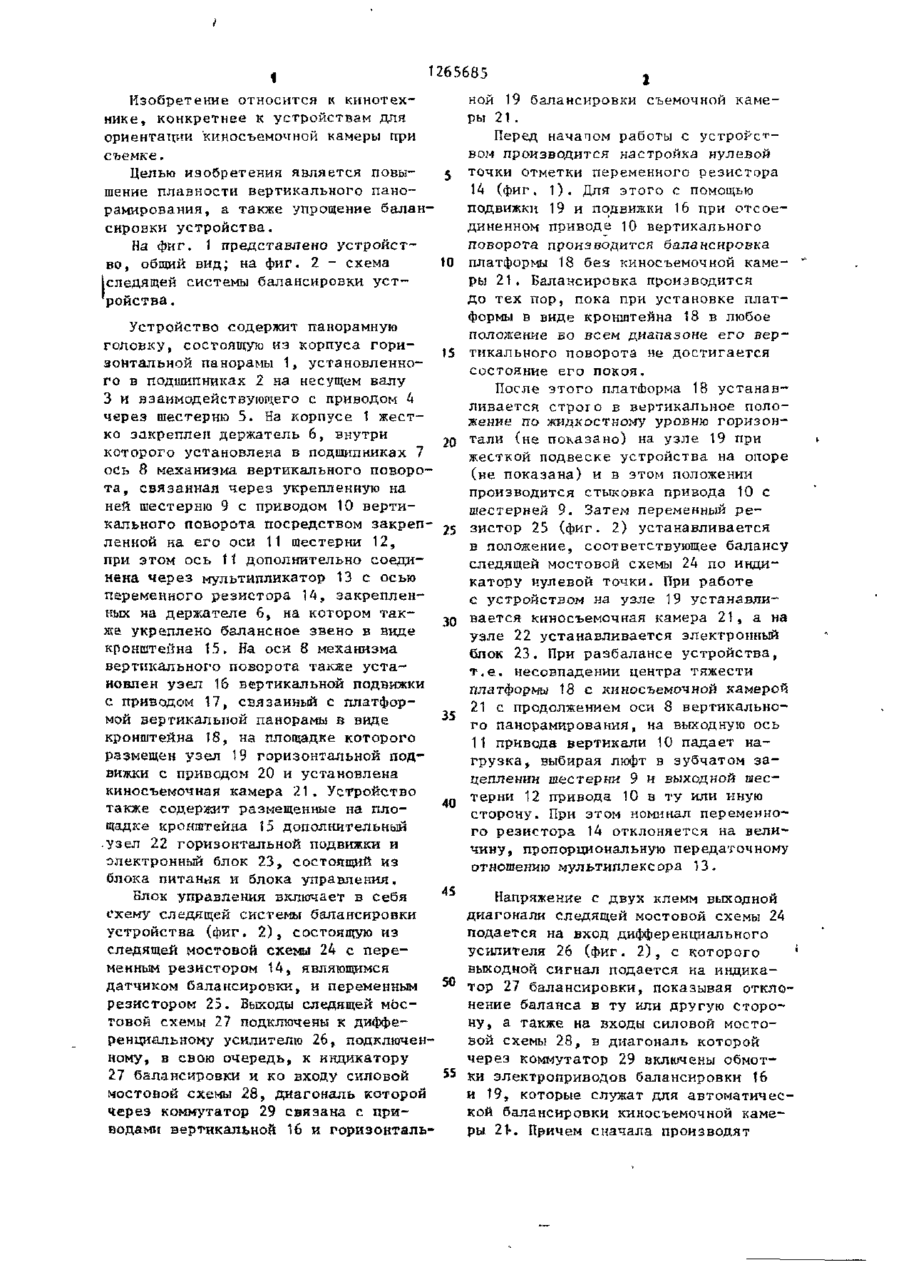
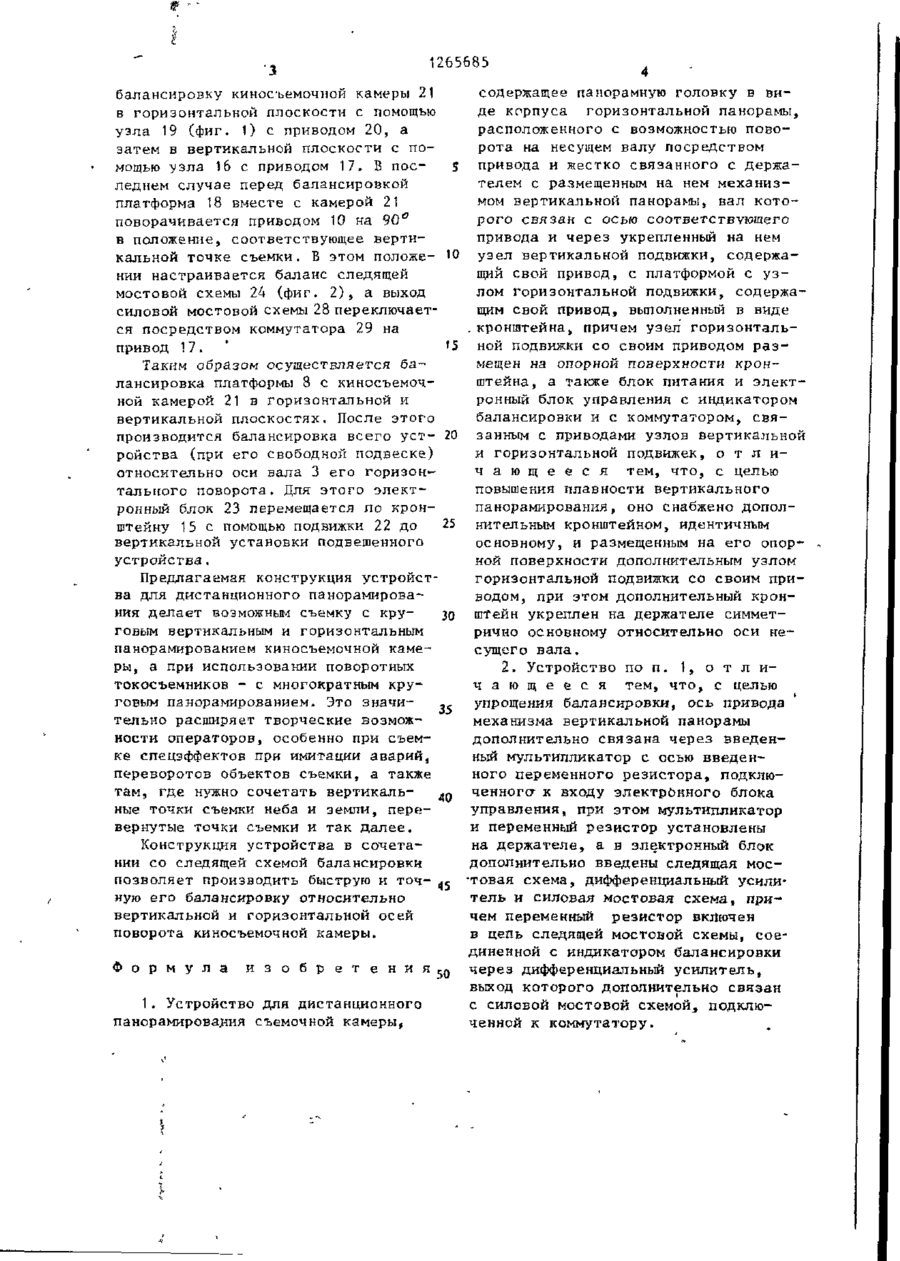
Изобретение относится к кино~ технике, конкретно к устройствам для ориентации киносъемочной камеры при съемке. Цель изобретения повышение плавности вертикального панорамирования. Устройство содержит панорамную'головку в виде уста новленного на ва\пу 3 корпуса 1 горизонтальной панорамы. В держателе 6 установлена ось 8 механизма вертикального поворота с приводом 10, на которой установлен узел 16 вертикальной подвижки с приводом 17. На идентичных кронштейнах 15, 18 размещены соответственно узлы 22, 19 горизонтальной подвижки. Электронный блок 23 состоит из блока питания и блока управления балансировкой устройства. С помощью узла 19 производится автоматическая балансировка киносъемочной камеры 21 в горизонтальной плоскости, а узлом 16 - в вертикальной плоскости. Балансировка всего устройства при его свободной подвеске осуществляется перемещением электронного блока 23 по кронштейну 15 с помощью узла 22 горизонтальной подвижки. В устройство может быть введен мультипликатор 13 с переменным резистором 14 при добавлении элементов в электронный блок 23. t з.п. ф-лы, 2 ил. Фиг.} \ о to CD СП T265685 Изобретение относится к кинотехной 19 балансировки съемочной камеры 21 . нике, конкретнее к устройствам для Перед начатом работы с устройсториентации киносъемочной камеры при вом производится настройка нулевой съемке. 5 точки отметки переменного резистора Целью изобретения является повы14 (фиг, 1). Для этого с помощью шение плавности вертикального паноподвижки 19 и подвижки 16 при отсоерамирования, а также упрощение баландиненном приводе Ю вертикального сировки устройства. поворота производится балансировка На фиг. 1 представлено устройстto платформы 18 без киносъемочной камево, общий вид; на фиг. 2 - схема ры 21, Балансировка производится (следящей системы балансировки устдо тех пор, пока при установке платройства. формы в виде кронштейна 18 в любое Устройство содержит панорамную положение во всем диапазоне его верголовку, состоящую из корпуса гори)5 тикального поворота не достигается зонтальной панорамы 1, установленносостояние его покоя. го в подшипниках 2 на несущем валу После этого платформа 18 устанав3 и взаимодействующего с приводом 4 ливается строг о в вертикальное полочерез шестерню 5. На корпусе 1 жестжение по жидкостному уровню горизонко закреплен держатель 6, внутри 20 тали (не показано) на узле 19 при которого установлена в подшипниках 7 жесткой подвеске устройства на опоре ось 8 механизма вертикального поворо(не показана) и в этом положении та, связанная через укрепленную на производится стыковка привода 10 с ней шестерню 9 с приводом 10 вертишестерней 9. Затем переменный рекального поворота посредством закреп- 25 зистор 25 (фиг. 2) устанавливается ленной на его оси 11 шестерни 12, в положение, соответствующее балансу при этом ось t1 дополнительно соедиследящей мостовой схемы 24 по индинена через мультипликатор 13 с осью катору нулевой точки. При работе переменного резистора 14, закрепленс устройством на узле 19 устанавлиных на держателе 6, на котором такЗо вается киносъемочная камера 21, а на же укреплено балансное звено в виде узле 22 устанавливается электронный кронштейна 15. На оси 8 механизма блок 23, При разбалансе устройства, вертикального поворота также устат.е. несовпадении центра тяжести новлен узел 16 вертикальной подвижки платформы 18 с киносъемочной камерой с приводом 17, связанный с платфор- 21 с продолжением оси 8 вертикальномой вертикальной панорамы в виде го панорамирования, на выходную ось кронштейна 18, на площадке которого 11 привода вертикали 10 падает наразмещен узел 19 горизонтальной подгрузка, выбирая люфт в зубчатом завижки с приводом 20 и установлена цеплении шестерни 9 и выходной шескиносъемочная камера 21. Устройство -0 терни 12 привода 10 в ту или иную также содержит размещенные на плосторону. При этом номинал переменнощадке кронштейна 15 дополнительный го резистора 14 отклоняется на вели~ .узел 22 горизонтальной подвижки и чину, пропорциональную передаточному электронный блок 23, состоящий из отношению мультиплексора 13. блока питания и блока управления. Блок управления включает в себя Напряжение с двух клемм выходной схему следящей системы балансировки диагонали следящей мостовой схемы 24 устройства (фиг. 2 ) , состоящую из подается на вход дифференциального следящей мостовой схемы 24 с переусилителя 26 (фиг. 2 ) , с которого ' менным резистором 14, являющимся выходной сигнал подается на индика50 датчиком балансировки, и переменным тор 27 балансировки, показывая отклорезистором 25. Выходы следящей моснение баланса в туили другую сторотовой схемы 27 подключены к диффену, а также на входы силовой мосторенциальному усилителю 26, подключенвой схемы 28, в диагональ которой ному, в свою очередь, к индикатору через коммутатор 29 включены обмот27 балансировки и ко входу силовой 55 ки электроприводов балансировки 16 мостовой схемы 28, диагональ которой и 19, которые служат для автоматичесЧерез коммутатор 29 связана с прикой балансировки киносъемочной камеводами вертикальной 16 и горизонтальры 21-. Причем сначала производят 1265685 балансировку киносъемочной камеры 21 содержащее панорамную головку в вив горизонтальной плоскости с помощью де корпуса горизонтальной панорамы, узла 19 (фиг. 1) с приводом 20, а расположенного с возможностью повозатем в вертикальной плоскости с порота на несущем валу посредством мощью узла 16 с приводом 17. В посS привода и жестко связанного с держаледнем случае перед балансировкой телем с размещенным на нем механизплатформа 18 вместе с камерой 21 мом вертикальной панорамы, вал котоповорачивается приводом 10 на 90° рого связан с осью соответствующего в положение, соответствующее вертипривода и через укрепленный на нем кальной точке съемки. Б этом положе- 10 узел вертикальной подвижки, содержании настраивается баланс следящей щий свой привод, с платформой с у з мостовой схемы 24 (фиг. 2 ) , а выход лом горизонтальной подвижки, содержасиловой мостовой схемы 28 переключаетщим свой привод, выполненный в виде ся посредством коммутатора 29 на . кронштейна, причем узел горизонтальпривод 17. 15 ной подвижки со своим приводом р а з мещен на опорной поверхности кронТаким образом осуществляется баштейна, а также блок питания и э л е к т лансировка платформы 8 с киносъемочронный блок управления с индикатором ной камерой 21 в горизонтальной и балансировки и с коммутатором, с в я вертикальной плоскостях. После этого производится балансировка всего уст- 20 занным с приводами узлов вертикальной и горизонтальной подвижек, о т л и ройства (при его свободной подвеске) ч а ю щ е е с я тем, что, с целью относительно оси вала 3 его горизонповышения плавности вертикального тального поворота. Для этого электпанорамирования, оно снабжено дополронный блок 23 перемещается ло крон25 нительным кронштейном, идентичным штейну 15 с помощью подвижки 22 до вертикальной установки подвешенного основному, и размещенным на его опорустройства. ной поверхности дополнительным узлом Предлагаемая конструкция устройстгоризонтальной подвижки со своим прива для дистанционного панорамироваводом, при этом дополнительный кронния делает возможным съемку с кру30 штейн укреплен на держателе симметговым вертикальным и горизонтальным рично основному относительно оси непанорамированием киносъемочной камесущего вала. ры, а при использовании поворотных 2. Устройство по п. 1, о т л и токосъемников - с многократным круч а ю щ е е с я тем, что, с целью говым панорамированием. Это значиупрощения балансировки, ось привода 35 тельно расширяет творческие возможмеханизма вертикальной панорамы ности операторов, особенно при съемдополнительно связана через введенке спецэффектов при имитации аварий, ный мультипликатор с осью введенпереворотов объектов съемки, а также ного переменного резистора, подклютам, где нужно сочетать вертикаль4 0 ченнога к входу электронного блока ные точки съемки неба и земли, переуправления, при этом мультипликатор вернутые точки съемки и так д а л е е . и переменный резистор установлены на держателе, а в электронный блок Конструкция устройства в сочетадополнительно введены следящая моснии со следящей схемой балансировки позволяет производить быструю и точ- 4 5 -товая схема, дифференциальный усилитель и силовая мостовая схема, приную его балансировку относительно чем переменный резистор включен вертикальной и горизонтальной осей в цепь следящей мостовой схемы, соеповорота киносъемочной камеры. диненной с индикатором балансировки Ф о р м у л а и з о б р е т е н и я 50 через дифференциальный усилитель, выход которого дополнительно связан с силовой мостовой схемой, подклю1. Устройство для дистанционного ченной к коммутатору. панорамирования съемочной камеры, 1265685 29 Фиг. 2 Редактор Н.Егорова Заказ 5660/42 Составитель С.Шигзлович Техред И.Попович Корректор Л.Пилипенко Тираж 436 Подписное ВНИИВД Государственного комитета СССР по делам изобретений и открытий 113035, Москва, Ж-35, Раушская н а б . , д . 4/5 Производственно-полиграфическое предприятие, г.Ужгород, ул.Проектная, 4
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for remote follow shooting of a camera
Автори англійськоюHorbarenko Hryhorii Vasyliovych, Kokush Anatolii Yakymovych, Tyschenko Borys Borysovych
Назва патенту російськоюУстройство для дистанционного панорамирования сьемочной камеры
Автори російськоюГорбаренко Григорий Васильевич, Кокуш Анатолий Акимович, Тищенко Борис Борисович
МПК / Мітки
МПК: G03B 17/00
Мітки: дистанційного, камери, пристрій, зйомочної, панорамування
Код посилання
<a href="https://ua.patents.su/4-2837-pristrijj-dlya-distancijjnogo-panoramuvannya-zjjomochno-kameri.html" target="_blank" rel="follow" title="База патентів України">Пристрій для дистанційного панорамування зйомочної камери</a>
Пристрій для дистанційного управління
Номер патенту: 1116
Опубліковано: 30.12.1993
Автор: Савицький Всеволод Олександрович
МПК: G05G 7/00
Мітки: пристрій, дистанційного, управління
Формула / Реферат:
Формула изобретенияУстройство для дистанционного управления, содержащее корпус с крышкой, скрепленные с корпусом направляющую трубу и установленные соосно ей две сопряженные по резьбе детали, причем одна из них, установленная с возможностью вращения относительно общей оси, имеет заплечики для сопряжения с корпусом и соединена с рукояткой, а другая, установленная с возможностью перемещения вдоль оси, имеет выступы, сопряженные с пазами...
Дуттьовий пристрій для отримання волокна
Номер патенту: 3269
Опубліковано: 26.12.1994
Автори: Польовий Ренат Петрович, Польовий Петро Петрович
МПК: C03B 37/01
Мітки: пристрій, отримання, дуттьовий, волокна
Формула / Реферат:
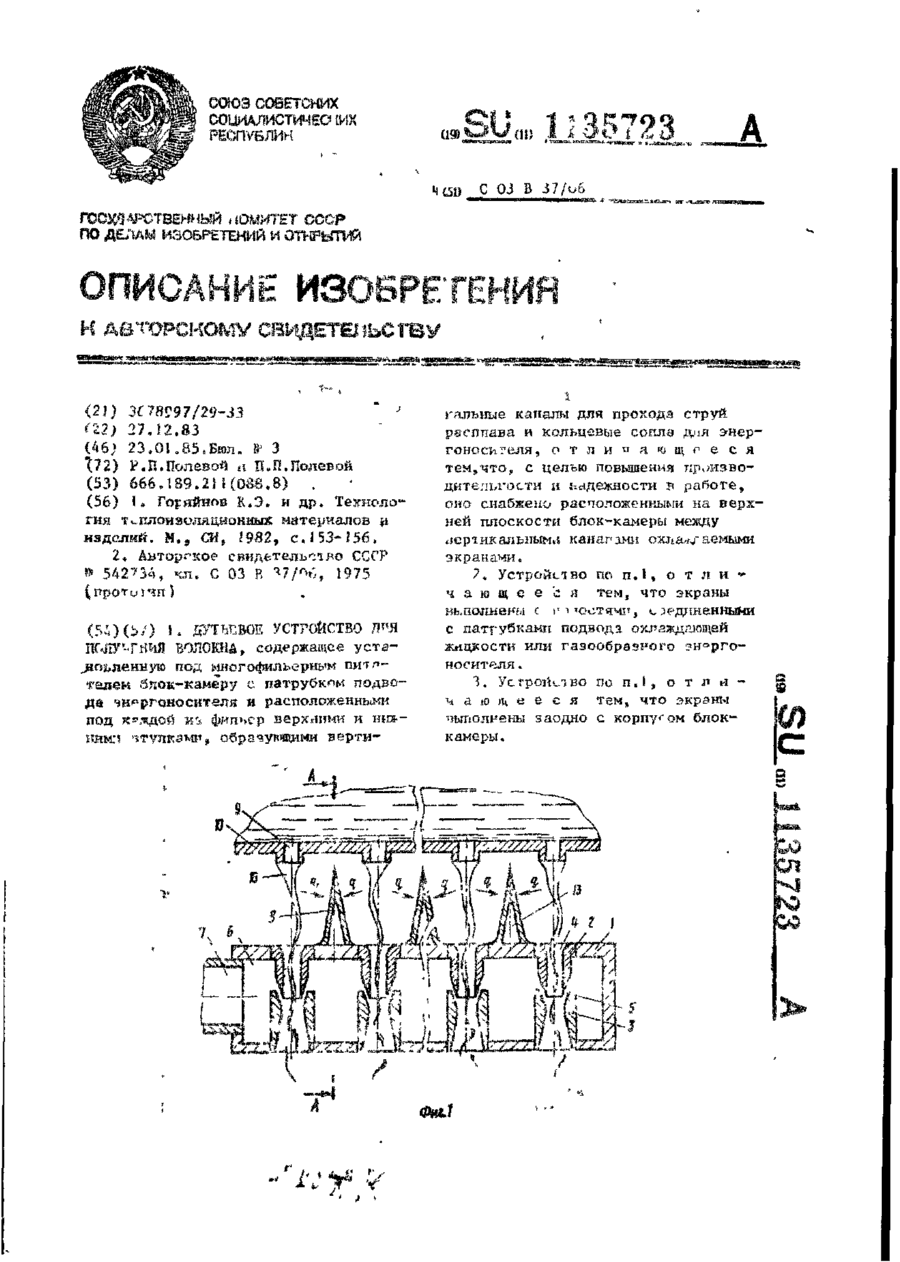
1. Дутьевое устройство для получения волокна, содержащее установленную под многофильерным питателем блок-камеру с патрубком подвода энергоносителя и расположенными под каждой из фильер верхними и нижними втулками, образующими вертикальные каналы для прохода струй расплава и кольцевые сопла для энергоносителя, отличающееся тем, что, с целью повышения производительности и надежности в работе, оно снабжено расположенными на верхней плоскости...
Cпосіб дистанційного виявлення вібрацій поверхні об’єкту
Номер патенту: 1482
Опубліковано: 25.07.1994
Автор: Сафронов Григорій Степанович
Мітки: дистанційного, об'єкту, поверхні, вібрацій, виявлення, cпосіб
Формула / Реферат:
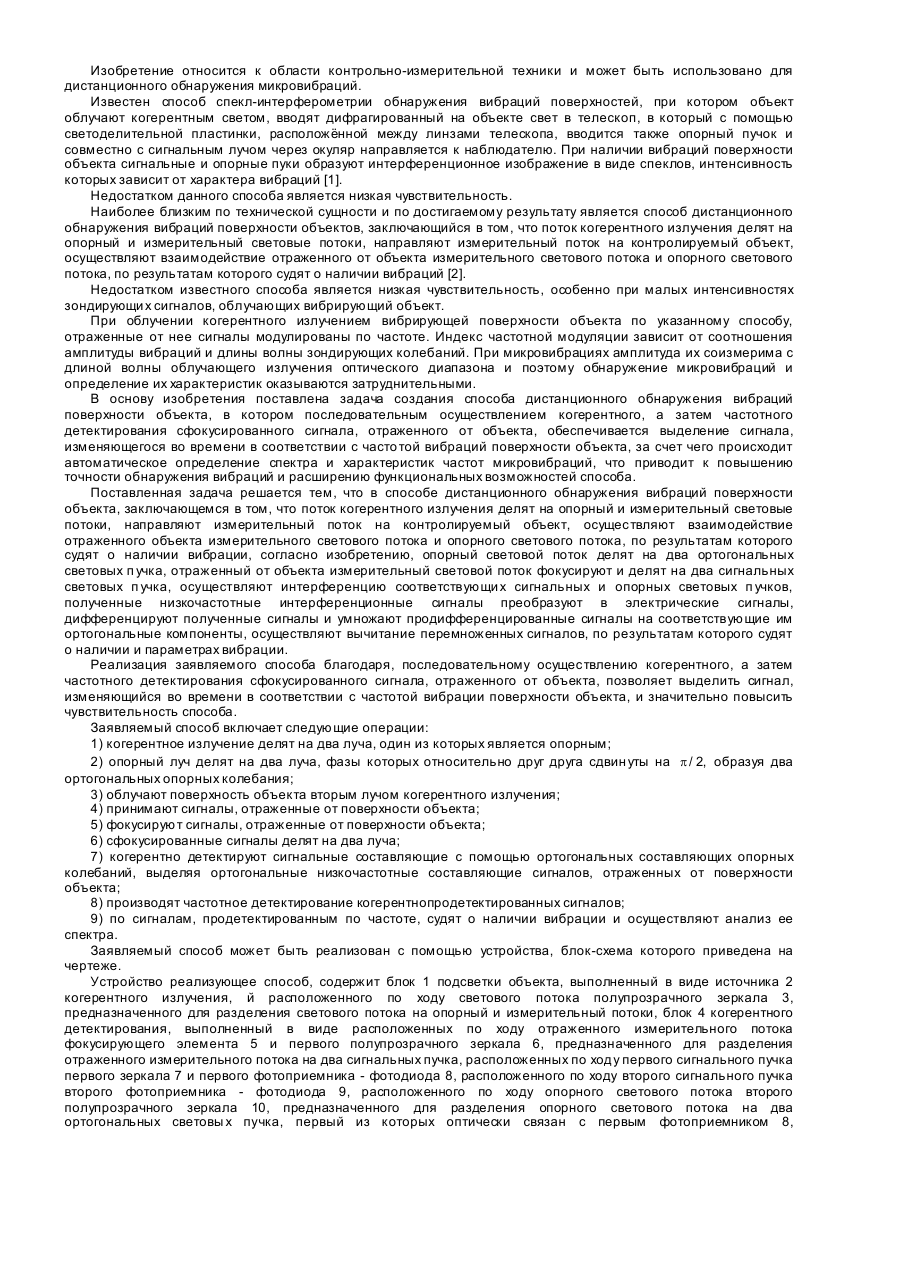
Способ дистанционного обнаружения вибраций поверхности объекта, заключающийся в том, что поток когерентного излучения делят на опорный и измерительный световые потоки, направляют измерительный поток на контролируемый объект, осуществляют взаимодействие отраженного объекта измерительного светового потока и опорного светового потока, по результатам которого судят о наличии вибрации, отличающийся тем, что опорный световой поток делят на два...
Спосіб виготовлення камери для культивування клітин
Номер патенту: 2692
Опубліковано: 26.12.1994
Автори: Білько Іван Петрович, Войцеховський Валерій Григорович, Білько Надія Михайлівна, Гашинський Володимир Владиславович
МПК: C12M 3/00
Мітки: культивування, камери, клітин, спосіб, виготовлення
Формула / Реферат:
Способ изготовления камеры для культивирования клеток, заключающийся в том, что формируют стенки и днище с образованием полости, закрывают крышкой и герметизируют, отличающийся тем, что, с целью упрощения, удешевления способа и возможности исследования клеток в камеру на разных этапах их развития, стенки, днище и крышку выполняют из полиакриламидного геля, при этом стенки и днище формируют, заливают рабочий раствор в пространство между...
Шіхта для виготовлення деталей контейнеру камери високого тиску

Номер патенту: 1373
Опубліковано: 25.03.1994
Автори: Івахненко Сергій Олексійович, Шульженко Олександр Олександрович, Виноградов Сергій Олександрович, Білоусов Ігор Святославович, Чіпенко Георгій Володимирович
МПК: C04B 35/48, B01J 3/04
Мітки: високого, тиску, виготовлення, контейнеру, шихта, деталей, камери
Формула / Реферат:
Шихта для изготовления деталей контейнера камеры высокого давлення, включающая галогенид щелочного металла и оксид, отличающаяся тем, что, с целью повышения стабильности давления, в реакционной ячейке контейнера и снижения потребляемой мощности нагрева, она в качестве оксида содержит стабилизированный диоксид циркония, при следующем соотношении компонентов, об. %:галогенид щелочного металла 30—95...
Попередній патент: Дистанційно керований кінооператорський кран
Наступний патент: Універсальний плечовий штатив для кінозйомочної камери
Випадковий патент: Спосіб одержання 8-метил-8-азабіцикло (3,2,1) окт-3-илового ефіру індол-3-карбонової кислоти