Пристрій кутового орієнтування втулок та контролю їх форми


Формула / Реферат
Пристрій кутового орієнтування втулок та контролю їх форми, що містить пустотілий шток із розміщеними один над одним у вертикальному ряду тангенціальними соплами для подачі стиснутого повітря, підпружинений притискний ролик, встановлений з можливістю вільного обертання відносно вертикальної осі, який відрізняється тим, що на торці ролика виконано кільцевий сектор з рівномірно почергово розподілених по колу радіальних дзеркальних світловідбивальних і світлоневідбивальних ділянок, над яким встановлено датчик положення відбивального типу, в корпусі якого жорстко закріплені випромінювач і фотоприймач так, що їх оптичні осі перетинаються під певним кутом поза корпусом на поверхні кільцевого сектора, при цьому фотоприймач підключений до блока підрахунку числа змін логічних рівнів вихідного струму фотоприймача.
Текст
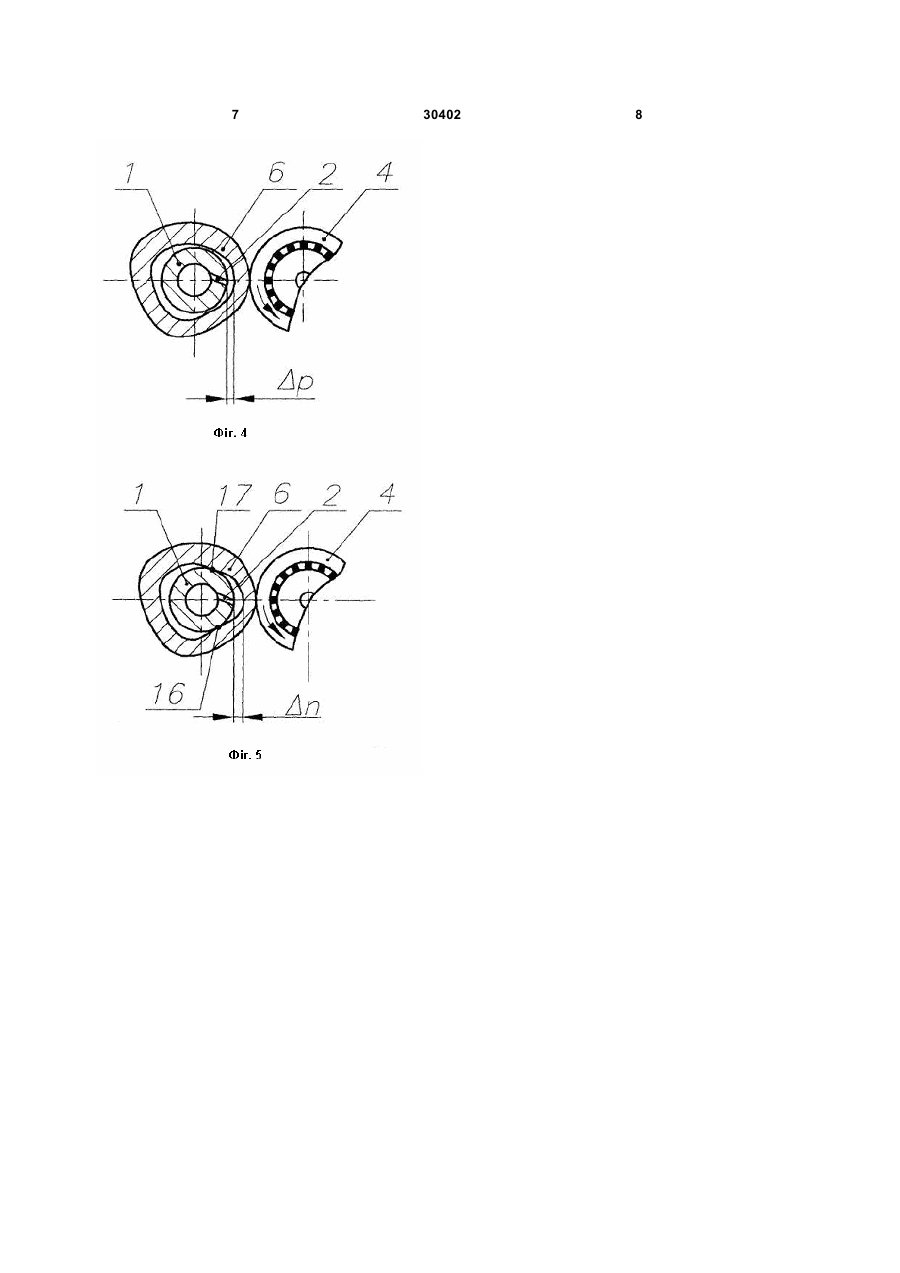
Пристрій кутового орієнтування втулок та контролю їх форми, що містить пустотілий шток із розміщеними один над одним у вертикальному ряду тангенціальними соплами для подачі стиснутого повітря, підпружинений притискний ролик, встановлений з можливістю вільного 3 для кругової фіксації втулки, на фіг. 5 зафіксоване положення контрольованої втулки. Пристрій для кутового орієнтування втулок та контролю їх форми, до складу якого входить пустотілий шток 1 із розміщеними один над одним у вертикальному ряду тангенціальними соплами 2 для подачі стиснутого повітря, підпружинений пружиною 3 притискний ролик 4 (фіг.1, фіг.2), встановлений з можливістю вільного обертання відносно вертикальної осі 5 і контактує із зовнішньою поверхнею втулки 6. На торці притискного ролика 4 виконано кільцевий сектор 7 з рівномірно почергово розподілених по колу радіальних дзеркальних світловідбивальних ділянок 8 і не світловідбивальних ділянок 9, над яким встановлено датчик положення відбивального типу 10, в корпусі якого жорстко закріплені випромінювач 11 і фотоприймач 12 так, що їх оптичні осі перетинаються під певним кутом поза корпусом датчика положення відбивального типу 10 на поверхні кільцевого сектора 7 в точці 13 (фіг.3), а параметри випромінювача 11 і чутливість фотоприймача 12 підібрані таким чином, що вихідний струм через фотоприймач приймає значення логічної одиниці при проходженні точки 13 перетину осей випромінювача 11 і фотоприймача 12 над дзеркальною світловідбивальною поверхнею 8, а значення логічного нуля - при проходженні над світло не відбивальною ділянкою 9 кільцевого сектора 7 притискного ролика 4. При цьому фотоприймач 12 підключений до блоку 14 (фіг.3) підрахунку числа змін логічних рівнів вихідного струму фотоприймача 12. Тангенціальні сопла 2 з'єднані з порожниною 15 пустотілого штока 1. Пристрій працює таким чином. На встановлений, наприклад, в транспортуючому пристрої пустотілий шток 1 вільно встановлюється втулка 6, внутрішня поверхня якої може мати відхилення від круглості. Прикладом деталей з такими місцевими або періодично повторюваними специфічними видами відхилень від круглості внутрішньої поверхні втулки може бути, наприклад, поздовжній паз з внутрішньої сторони втулки або огранка її внутрішньої поверхні, утворена як наслідок впливу, наприклад, затискних зусиль при обробці деталей різанням. Вказаний поздовжній паз втулки утворюється, наприклад, при згортанні втулок привідних ланцюгів з каліброваної стрічки, довжина якої є розгорткою циліндричної поверхні втулки. Саме в зоні взаємного дотику країв цієї стрічки і формується вказаний поздовжній паз. При виготовленні привідних ланцюгів з підвищеними вимогами до якості цей паз кожної втулки в процесі складання внутрішньої ланки привідного ланцюга встановлюють в напрямі до центру внутрішньої ланки шляхом введення операції кругового орієнтування втулки за ознакою орієнтування у вигляді зазначеного паза. Однак, якщо внаслідок, наприклад, забрудненості на попередніх технологічних операціях в окремої втулки цей паз буде закритим, то це не дасть можливості орієнтуючому пристрою вивести паз цієї втулки у задане кругове положення і вона за 30402 4 положенням паза буде при складанні зафіксована в довільному положенні. Тому доцільніше провести вибраковування таких втулок, за керуючим сигналом розглядуваного пристрою, перед операцією кругового орієнтування, забезпечивши тим самим складання виробу тільки з орієнтованими в задане положення втулками. У внутрішню порожнину 15 пустотілого штока 1 подається стиснуте повітря, яке, витікаючи через тангенціальні сопла 4, починає провертати втулку 6 навколо її осі і одночасно зміщати її в радіальному напрямі до вертикальної осі 5 притискного ролика 4. В залежності від жорсткістних характеристик пружини 3, її попередньої деформації, конструктивних характеристик і режиму витікання повітряних потоків через тангенціальні сопла 2, між втулкою 6 і пустотілим штоком 1 встановлюється певний постійний зазор D в (фіг.2) у випадку, коли внутрішня поверхня втулки має нульові відхилення від круглості. Після закінчення відповідного перехідного процесу втулка 6 провертається із постійною кутовою швидкістю в напрямі дії тангенціальних повітряних потоків, що витікають із тангенціальних сопел 2, і з відповідною постійною кутовою швидкістю обертається кінематично з'єднаний з втулкою 6 притискний ролик 4. При цьому світловий промінь від випромінювача 11 почергово попадає на радіусну дзеркальну світловідбивальну ділянку 8, викликаючи виникнення в фотоприймачі 12 вихідного струму, який відповідає логічній одиниці, та на світло не відбивальну ділянку 9 притискного ролика 4, викликаючи виникнення в фотоприймачі 12 вихідного струму, який відповідає логічному нулю. Блок 14 підрахунку числа змін логічних рівнів вихідного струму фотоприймача 12 постійно нагромаджує сумарне число змін логічних рівнів, що і свідчить про круговий рух втулки 6 та кінематично зв'язаного з нею притискного ролика 4. Якщо ж втулка 6 має певні відхилення форми внутрішньої поверхні, наприклад, у вигляді трьохвершинної огранки (фіг.4), то в певний момент зазор між втулкою 6 і пустотілим штоком 1 в зоні розміщення тангенціальних сопел 2 збільшиться, що призведе до зменшення радіальної складової дії на втулку тангенціальних повітряних потоків, що витікають із тангенціальних сопел 2, і пружина З почне зміщати притискний ролик 4 разом із втулкою 6 в напрямі до осі пустотілого штока 1. Це призведе до того, що сила дії пружини 3 внаслідок її розтискання зменшиться, а сила дії тангенціальних повітряних потоків на втулку, внаслідок зменшення зазору між внутрішньою поверхнею втулки 6 і зовнішньою поверхнею пустотілого штока 1, збільшиться. Якщо при цьому тангенціальна складова дії на втулку повітряних потоків буде створювати обертовий момент, більший за момент опору від сил тертя, зведених до втулки 6, то вона буде і далі продовжувати обертальний рух, блок 14 підрахунку числа змін логічних рівнів вихідного струму фотоприймача 12 і далі буде нагромаджувати сумарне число змін логічних 5 рівнів, а між втулкою 6 і пустотілим штоком 1 буде залишатись відмінний від нуля зазор D р (фіг. 4). Однак в певний момент, якщо дійсні відхилення від круглості перевищать наперед задане значення, втулка 6 і пустотілий шток 1 можуть увійти в контакт, наприклад, в точках 16, 17 (фіг. 5). При цьому в зоні вертикальних тангенціальних сопел 2 встановиться зазор D n, відштовхувальна дія на втулку тангенціальних повітряних потоків внаслідок збільшення зазору може зменшитись до нуля і, навіть, стати від'ємною, а пружина 3 буде продовжувати підтискати втулку 6 до пустотілого штока 1. Сумарна сила притискання втулки 6 до пустотілого штока 1 може створить протидіючий момент опору, більший за обертовий, що зафіксує втулку в круговому положенні. При цьому притискний ролик 4 також зупиниться. Це приведе до того, що блок 14 підрахунку числа змін логічних рівнів вихідного струму фотоприймача 12 за визначений наперед інтервал часу дасть нульове сумарне число змін логічних рівнів. Таким чином запропонований пристрій дозволяє за рахунок отримання інформації про сумарне число змін логічних рівнів за визначений наперед інтервал часу зробити висновок або про круговий рух втулки 6 відносно пустотілого штока 1, або про фіксоване положення відносно нього цієї втулки та сформувати відповідний командний сигнал на розсортування цієї втулки в число деталей, відхилення форми яких не перевищують задану величину, якщо блок 14 підрахунку числа змін логічних рівнів вихідного струму фотоприймача 12 за визначений наперед інтервал часу дасть ненульове сумарне число змін логічних рівнів, або в число деталей, відхилення форми яких перевищують задану величину, якщо блок 14 підрахунку числа змін логічних рівнів вихідного струму фотоприймача 12 за визначений наперед інтервал часу дасть нульове сумарне число змін логічних рівнів. Проведені дослідження автора дають можливість стверджувати, що для наперед визначеного зовнішнього діаметра пустотілого штока 1, який забезпечував би гарантований, наперед визначений зазор між втулкою 6 і пустотілим штоком 1, з врахуванням зміни внутрішнього діаметра втулки в межах заданого допуску на її розмір, втулка 6 буде гарантовано фіксуватись в круговому положенні тільки при перевищенні визначеного наперед для заданих вихідних характеристик відхилення від круглості внутрішнього діаметра цієї втулки. Тобто за фіксацією чи постійним провертанням втулки 6 відносно пустотілого штока 1 з вертикальним рядом тангенціальних отворів 2 можна приймати рішення про перевищення або не перевищення допустимих відхилень від круглості внутрішньої поверхні контрольованої втулки. Отримання такого сигналу в транспортуючому пристрої дозволить автоматизувати процес розсортування втулок за граничними значеннями відхилень їх внутрішньої поверхні на протязі здійснення операції транспортування контрольованих втулок. Економічний ефект від впровадження цього пристрою можна отримати за рахунок підвищення 30402 6 продуктивності здійснення операції контролю відхилень форми деталей типу втулок за рахунок суміщення її з операцією транспортування. 7 30402 8
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice of angular orientation of bushings and control of their form
Автори англійськоюKutsevych Oleksandr Arsenovych
Назва патенту російськоюУстройство углового ориентирования втулок и контроля их формы
Автори російськоюКуцевич Александр Арсенович
МПК / Мітки
МПК: B23Q 7/00
Мітки: кутового, контролю, орієнтування, пристрій, форми, втулок
Код посилання
<a href="https://ua.patents.su/4-30402-pristrijj-kutovogo-oriehntuvannya-vtulok-ta-kontrolyu-kh-formi.html" target="_blank" rel="follow" title="База патентів України">Пристрій кутового орієнтування втулок та контролю їх форми</a>
Пристрій для визначення жорсткості втулок
Номер патенту: 29133
Опубліковано: 10.01.2008
Автори: Лопатько Костянтин Георгійович, Афтанділянц Євген Григорович, КОТРЕЧКО ОЛЕКСІЙ ОЛЕКСІЙОВИЧ, Похиленко Геннадій Миколайович
МПК: G01N 33/46
Мітки: пристрій, втулок, жорсткості, визначення
Формула / Реферат:
Пристрій для визначення жорсткості втулок, що містить опорну плиту з можливістю установки на ній втулки, який відрізняється тим, що на опорній плиті закріплені верхня і нижня хрестовини з можливістю взаємодії через розпірки і сегменти з верхньою рухомою хрестовиною.
Пристрій для контролю форми поверхні
Номер патенту: 59549
Опубліковано: 15.09.2003
Автори: Соколов Володимир Олександрович, Плаксій Юрій Степанович
МПК: G01M 11/08
Мітки: поверхні, контролю, форми, пристрій
Формула / Реферат:
Пристрій для контролю форми поверхні, що включає джерело випромінювання, сканер, оптичну систему і позиційно чутливий фотоприймач, який відрізняється тим, що включає датчик положення променя, замість двокоординатного фотоприймача використаний лінійний фотоприймач, а в складі оптичної системи використана растрова лінза.
Спосіб визначення міцності втулок
Номер патенту: 21059
Опубліковано: 15.02.2007
Автор: КОТРЕЧКО ОЛЕКСІЙ ОЛЕКСІЙОВИЧ
МПК: G01N 3/00
Мітки: втулок, визначення, спосіб, міцності
Формула / Реферат:
Спосіб визначення міцності втулок, що включає прикладання навантаження до їх внутрішніх поверхонь, який відрізняється тим, що зміну напрямку зусилля від верхньої головки випробувальної машини з вертикального до горизонтального, направленого перпендикулярно до внутрішньої поверхні втулки, забезпечують за допомогою сегментів, шарнірно з’єднаних з хрестовинами, нижня з яких є опорною плитою пристрою, а до хвостовика верхньої прикладають...
Пристрій для формування згортних втулок
Номер патенту: 55106
Опубліковано: 17.03.2003
Автори: Сеник Андрій Антонович, Кривий Петро Дмитрович
МПК: B21D 05/10
Мітки: втулок, згортних, пристрій, формування
Формула / Реферат:
Пристрій для формування згортних втулок, що складається з корпусу, в якому виконаний ступінчатий циліндричний канал, що спряжений з транспортною щілиною, циліндричної оправки, яка встановлена всередині циліндричного каналу на двох опорах, шибера, закріпленого на підпружиненому пуансоні, який відрізняється тим, що транспортна щілина виконана криволінійною з постійною кривизною певного радіуса, а циліндрична оправка з можливістю осьового...
Спосіб визначення міцності втулок на стиснення
Номер патенту: 23925
Опубліковано: 11.06.2007
Автор: КОТРЕЧКО ОЛЕКСІЙ ОЛЕКСІЙОВИЧ
МПК: G01N 3/00
Мітки: стиснення, міцності, спосіб, визначення, втулок
Формула / Реферат:
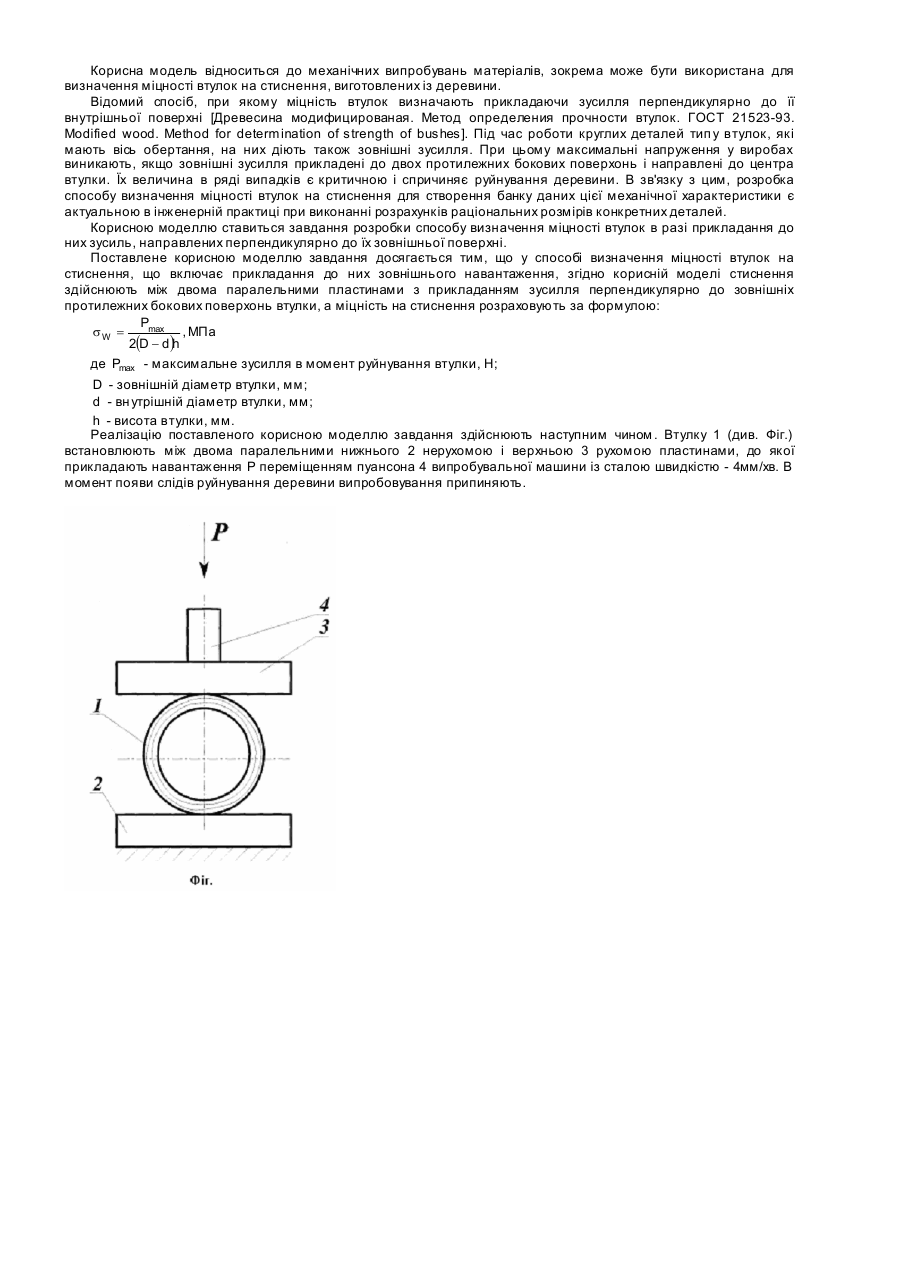
Спосіб визначення міцності втулок на стиснення, що включає прикладання до них зовнішнього навантаження, який відрізняється тим, що стиснення здійснюють між двома паралельними пластинами з прикладанням зусилля перпендикулярно до зовнішніх протилежних бокових поверхонь втулки, а міцність на стиснення розраховують за формулоюде
Попередній патент: Спосіб добору на підвищення продуктивності селекційного матеріалу озимої пшениці
Наступний патент: Спосіб визначення розміру дефекту передньої черевної стінки при післяопераційних вентральних грижах
Випадковий патент: Спосіб прогнозування перебігу гострого панкреатиту