Торцевий асинхронний електродвигун з вільним ротором
Номер патенту: 34551
Опубліковано: 11.08.2008
Автори: Невзлін Борис Ісаакович, Єрошин Сергій Сергійович, Мірошник Сергій Олександрович

Формула / Реферат
1. Торцевий асинхронний електродвигун з вільним ротором кільцевої форми із струмопровідного матеріалу, що містить один або два кільцеві статори з розподіленими обмотками на їх торцевих поверхнях з боку ротора, прокладеними в пазах під кутом нахилу до радіуса від 0° до 90°, який відрізняється тим, що зовнішній радіус ротора не менший за зовнішній радіус статорів, а пази в статорах прокладено так, що точки їх осей, найближчі до центра статора, визначають коло, зване ділильним, радіус якого RO знаходять із співвідношення:
 (1)
(1)
де при ![]() а при
а при ![]()
![]() - радіус ротора внутрішній;
- радіус ротора внутрішній; ![]() - радіус статора внутрішній;
- радіус статора внутрішній; ![]() - радіус статора зовнішній.
- радіус статора зовнішній.
2. Електродвигун за п. 1, який відрізняється тим, що внутрішній радіус ротора більший за внутрішній радіус статора, причому відношення внутрішнього радіуса ротора до зовнішнього радіуса статора вибирають в інтервалі від ![]() до 1, при цьому як ротор може бути використаний алмазний відрізний круг з внутрішньою різальною крайкою.
до 1, при цьому як ротор може бути використаний алмазний відрізний круг з внутрішньою різальною крайкою.
3. Електродвигун за п. 1, який відрізняється тим, що внутрішній радіус ротора може бути меншим за внутрішній радіус статора, а відношення внутрішнього радіуса статора до зовнішнього радіуса статора вибирають в інтервалі від ![]() до 1, причому ротор може бути використаний як робоче колесо відцентрового насоса.
до 1, причому ротор може бути використаний як робоче колесо відцентрового насоса.
Текст
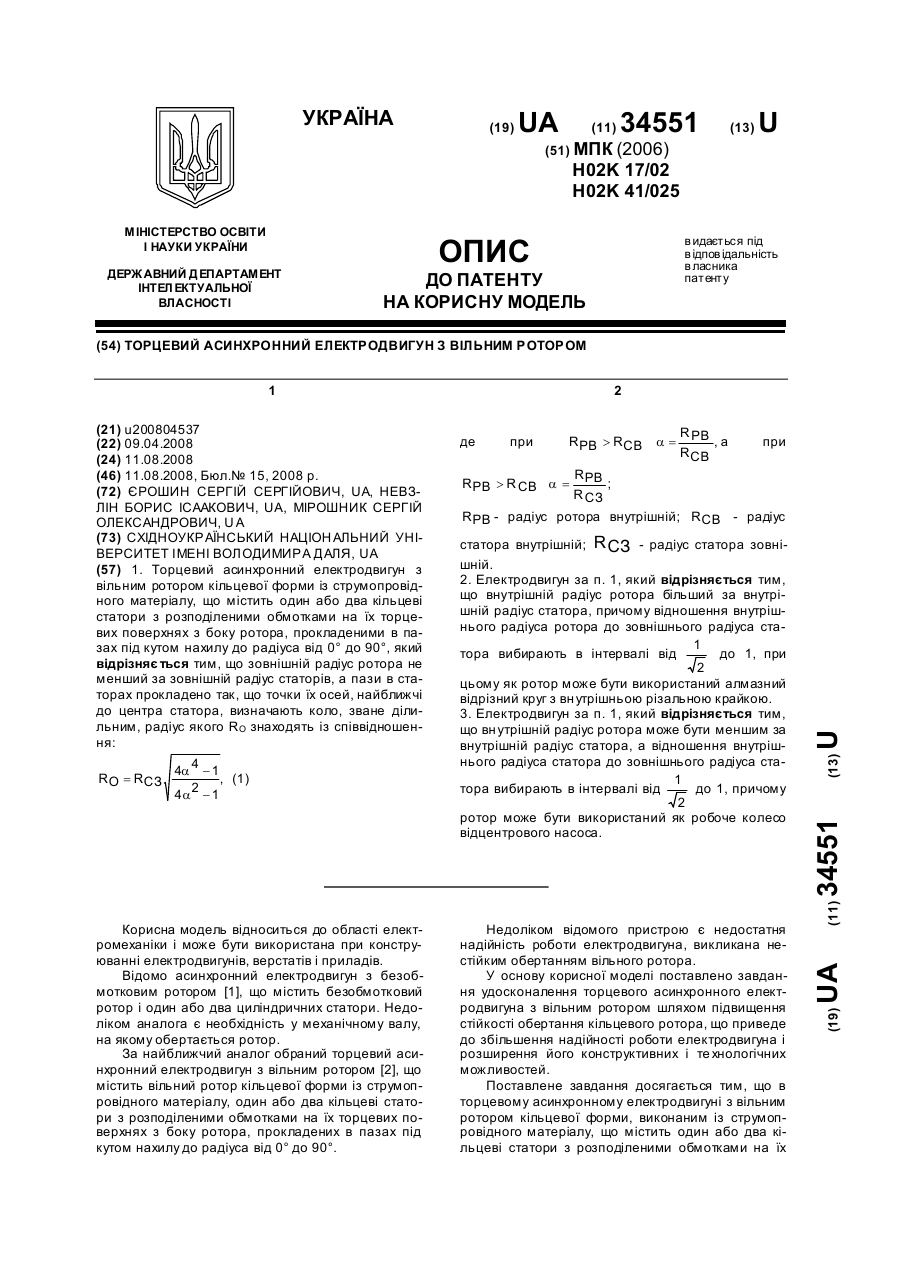
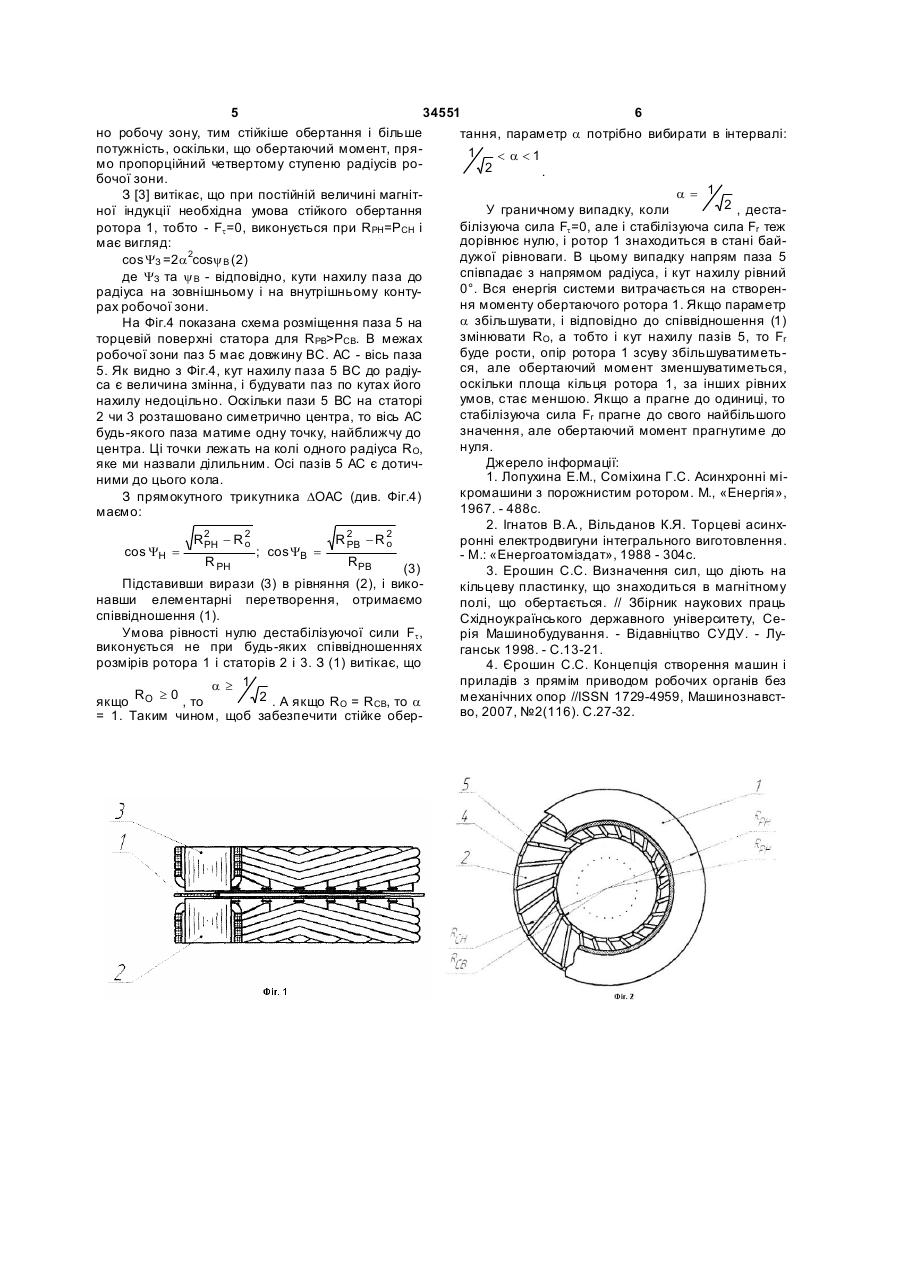
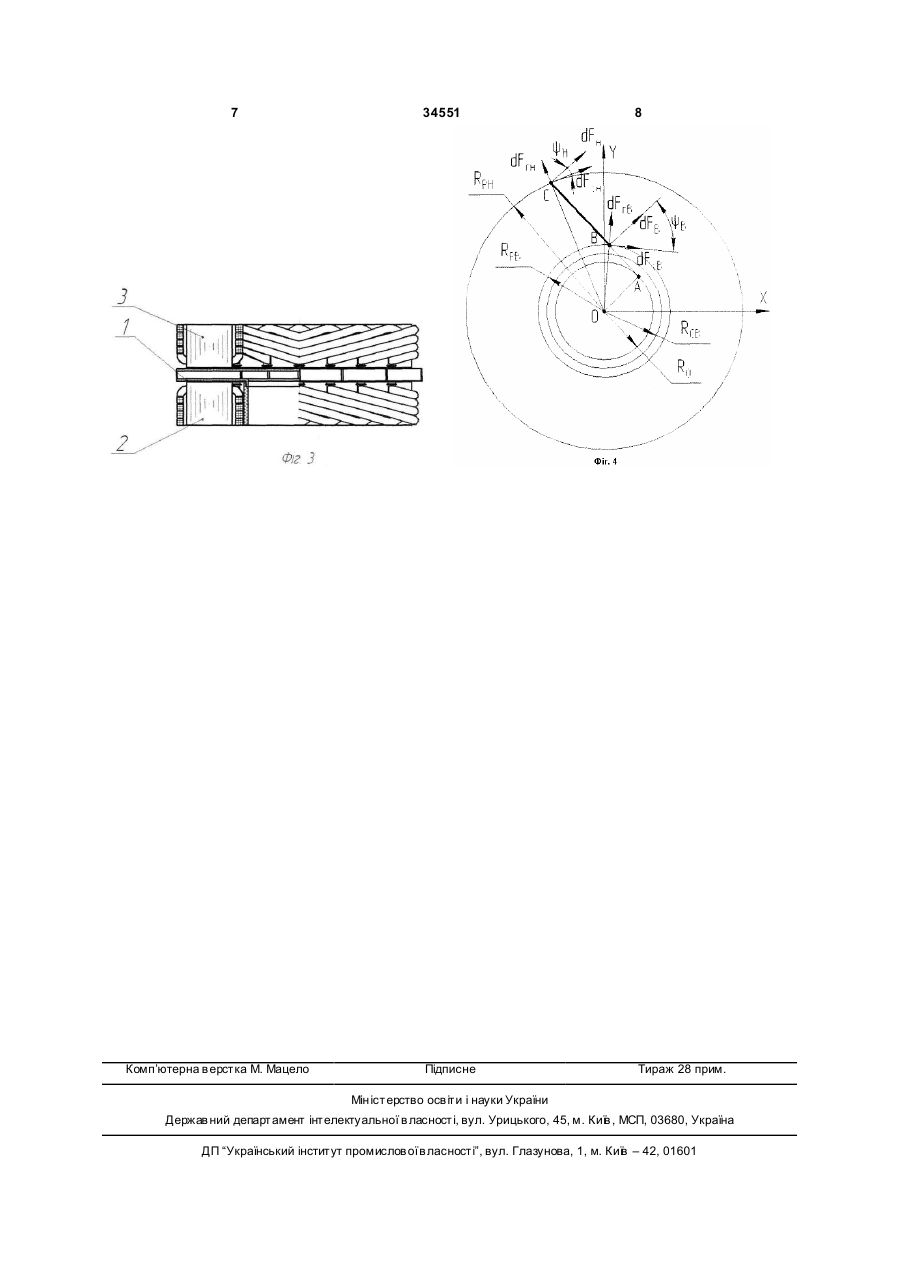
1. Торцевий асинхронний електродвигун з вільним ротором кільцевої форми із струмопровідного матеріалу, що містить один або два кільцеві статори з розподіленими обмотками на їх торцевих поверхнях з боку ротора, прокладеними в пазах під кутом нахилу до радіуса від 0° до 90°, який відрізняє ться тим, що зовнішній радіус ротора не менший за зовнішній радіус статорів, а пази в статорах прокладено так, що точки їх осей, найближчі до центра статора, визначають коло, зване ділильним, радіус якого RO знаходять із співвідношення: 2 3 34551 4 торцевих поверхнях з боку ротора, прокладеними RРВ>RСВ (як ротор застосовано робоче колесо відв пазах під кутом нахилу до радіуса від 0° до 90°, центрового насоса); на Фіг.4 показана схема роззгідно корисної моделі зовнішній радіус ротора не міщення паза на торцевій поверхні статора. менший за зовнішній радіус статорів, а пази у стаЕлектродвигун містить вільний ротор 1, нижній торах прокладено так, що точки їх осей, найближчі статор 2, верхній статор 3. На торцевих поверхнях до центра статора, визначають коло, зване ділистаторів 2 і 3, звернених до вільного ротора 1, розльним, радіус якого RO знаходять із співвідношенташовані розподілені обмотки 4 в пазах 5 під кутом ня: нахилу до радіуса. Кут на хилу пазів 5 виходить в результаті розташування за схемою, приведеною 4a 4 - 1 (1) на Фіг.4. Вісь АС паза 5 ВС є дотична до ділильноRO = RCЗ , 2 -1 го кола радіуса RO, який визначається із співвід4a ношення (1). RРВ Торцевий асинхронний електродвигун з вільде при при RРВ > RСВ = a ,а RСВ ним ротором працює таким чином. Обмотки статорів 2 і 3 вмикають у мережу (наприклад, трифазну RРВ RРВ RСВ, то робоча зона визначається кільцем із Стабілізація просторового положення вільного радіусами RРВ та RСН, тобто ширина кільця ротораротора полягає в тому, що ротор, що обертається, 1 менше ширина за ширину кілець статорів 2 і 3. при дії на нього зовнішніх сил, що створюють зсув Це зручно, наприклад, при використанні як ротора його центра мас, повинен чинити опір цьому зсуву, алмазного відрізного круга з вн утрішньою ріжучою а при знятті зовнішньої сили - повертатися в покрайкою (див. Фіг.1). Якщо RРВRСВ (як ротор застосований алмазний відрізрізняються від радіусів статорів на 2-7%. Таким ний круг з внутрішньою ріжучою крайкою); на Фіг.2 чином, розміри робочої зони дещо більша, ніж - горизонтальна проекція (верхній індуктор не поплоща статорів 2 і 3. Ця поправка легко визначаказаний); на Фіг.3 показана фронтальна проекція ється експериментальне і робить великий вплив торцевого електродвигуна з вільним ротором при на процес. Відповідно до [3], чим точніше підібра 5 34551 6 но робочу зону, тим стійкіше обертання і більше тання, параметр a потрібно вибирати в інтервалі: потужність, оскільки, що обертаючий момент, пря1 < a РСВ. В межах буде рости, опір ротора 1 зсуву збільшуватиметьробочої зони паз 5 має довжину ВС. AC - вісь паза ся, але обертаючий момент зменшуватиметься, 5. Як видно з Фіг.4, кут нахилу паза 5 ВС до радіуоскільки площа кільця ротора 1, за інших рівних са є величина змінна, і будувати паз по кутах його умов, стає меншою. Якщо а прагне до одиниці, то нахилу недоцільно. Оскільки пази 5 ВС на статорі стабілізуюча сила Fr прагне до свого найбільшого 2 чи 3 розташовано симетрично центра, то вісь АС значення, але обертаючий момент прагнутиме до будь-якого паза матиме одну точку, найближчу до нуля. центра. Ці точки лежать на колі одного радіуса RO, Джерело інформації: яке ми назвали ділильним. Осі пазів 5 AC є дотич1. Лопухина Е.М., Соміхина Г.С. Асинхронні міними до цього кола. кромашини з порожнистим ротором. М., «Енергія», З прямокутного трикутника DОАС (див. Фіг.4) 1967. - 488с. маємо: 2. Ігнатов В.А., Вільданов К.Я. Торцеві асинхR2 - R 2 R2 -R2 ронні електродвигуни інтегрального виготовлення. o o PH PВ cos YH = ; cos YВ = - М.: «Енергоатоміздат», 1988 - 304с. R PH RPВ (3) 3. Ерошин С.С. Визначення сил, що діють на Підставивши вирази (3) в рівняння (2), і викокільцеву пластинку, що знаходиться в магнітному навши елементарні перетворення, отримаємо полі, що обертається. // Збірник наукових праць співвідношення (1). Східноукраїнського державного університету, СеУмова рівності нулю дестабілізуючої сили Ft , рія Машинобудування. - Відавніцтво СУДУ. - Лувиконується не при будь-яких співвідношеннях ганськ 1998. - С.13-21. розмірів ротора 1 і статорів 2 і 3. З (1) витікає, що 4. Єрошин С.С. Концепція створення машин і приладів з прямім приводом робочих органів без 1 a³ 2 . А якщо RO = RСВ, то a механічних опор //ISSN 1729-4959, Машинознавстякщо RO ³ 0 , то во, 2007, №2(116). C.27-32. = 1. Таким чином, щоб забезпечити стійке обер 7 Комп’ютерна в ерстка М. Мацело 34551 8 Підписне Тираж 28 прим. Міністерство осв іт и і науки України Держав ний департамент інтелектуальної в ласності, вул. Урицького, 45, м. Київ , МСП, 03680, Україна ДП “Український інститут промислов ої в ласності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюButt asynchronous electric motor with a free rotor
Автори англійськоюYeroshyn Serhii Serhiiovych, Avhust Villi Vilhelmovych, Miroshnyk Serhii Oleksandrovych
Назва патенту російськоюТорцевой асинхронный электродвигатель со свободным ротором
Автори російськоюЕрошин Сергей Сергеевич, Август Вилли Вильгельмович, Мирошник Сергей Александрович
МПК / Мітки
МПК: H02K 41/025, H02K 17/02
Мітки: ротором, вільним, електродвигун, асинхронний, торцевий
Код посилання
<a href="https://ua.patents.su/4-34551-torcevijj-asinkhronnijj-elektrodvigun-z-vilnim-rotorom.html" target="_blank" rel="follow" title="База патентів України">Торцевий асинхронний електродвигун з вільним ротором</a>
Асинхронний електродвигун
Номер патенту: 9182
Опубліковано: 30.09.1996
Автор: Головський Людвіг Петрович
МПК: H02K 11/00
Мітки: електродвигун, асинхронний
Формула / Реферат:
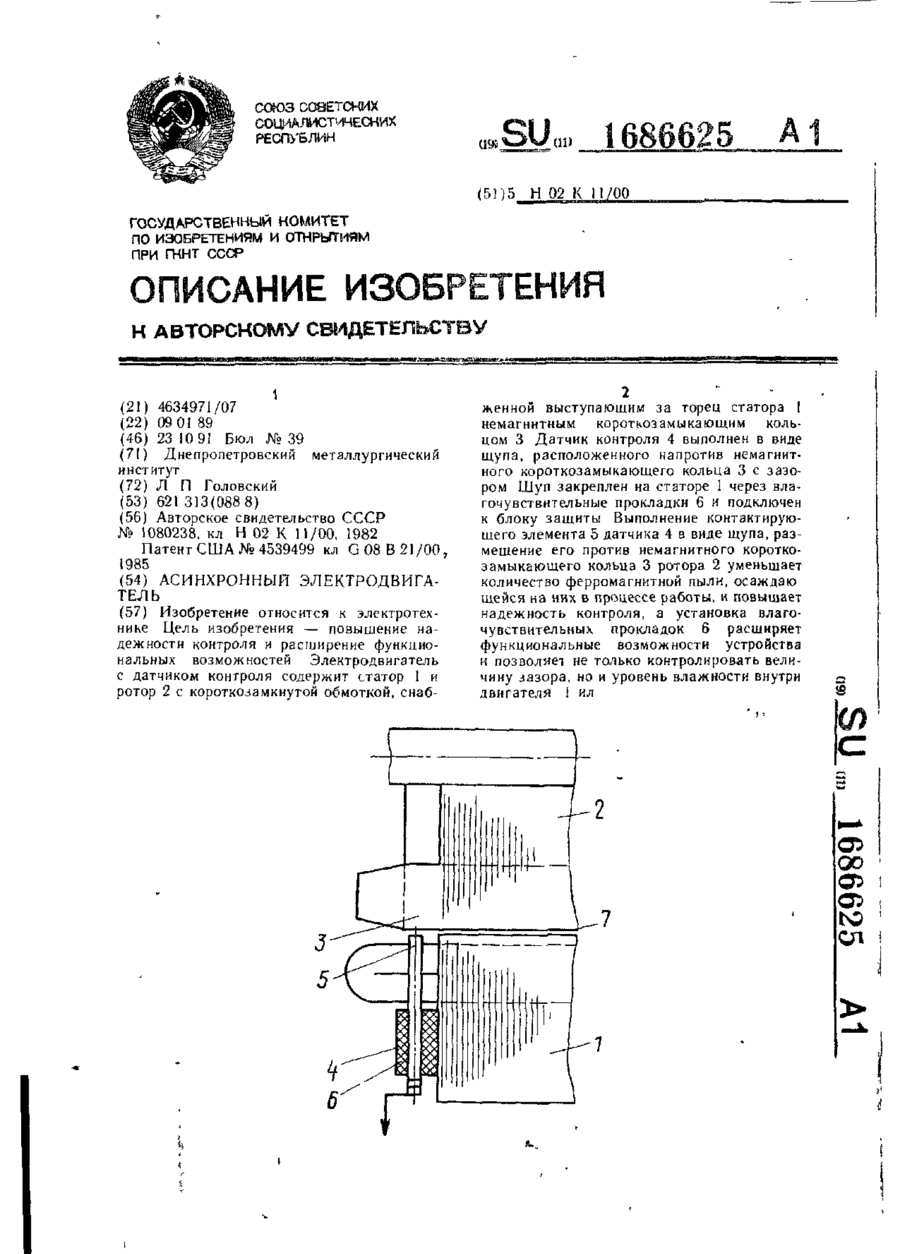
Асинхронный электродвигатель, содержащий статор, ротор с короткозамкнутой обмоткой с немагиитными короткозамыкаюшими кольцами, датчик контроля зазора, контактирующий элемент которого установлен на статоре с возможностью механического взаимодействия с ротором при изменении величины воздушного зазора, и предназначенный для подключения к блоку защиты, отличающийся тем, что, с целью повышения надежности контроля и расширения функциональных...
Асинхронний тяговий електродвигун
Номер патенту: 83127
Опубліковано: 10.06.2008
Автори: Грівін Сергій Анатолійович, Гавріш Віктор Григорович, Макарєєв Олександр Дмитрович
МПК: H02K 5/22, H02K 17/02
Мітки: електродвигун, асинхронний, тяговий
Формула / Реферат:
1. Асинхронний тяговий електродвигун, що містить корпус, в якому закріплені статор і ротор з короткозамкненою обмоткою, два підшипникових вузли, закріплену на корпусі коробку виводів, що містить високовольтну коробку з клемною високовольтною панеллю, до якої приєднані вивідні шини обмотки статора, і низьковольтну коробку з клемною низьковольтною панеллю, до якої приєднані вивідні кінці провідників від встановлених на двигуні датчиків ланцюгів...
Асинхронний короткозамкнутий електродвигун для приводів гірничо-шахтного електрообладнання
Номер патенту: 1657
Опубліковано: 17.03.2003
Автори: Ткачук Микола Миколаєвич, Ткачук Олександр Миколаєвич, Каїка Василь Васильович
МПК: H02K 17/00
Мітки: електродвигун, електрообладнання, короткозамкнутий, асинхронний, приводів, гірничо-шахтного
Формула / Реферат:
Асинхронний короткозамкнутий електродвигун для приводів гірничошахтного електрообладнання, який працює в режимах частих пусків і реверсів, що містить статор і короткозамкнутий ротор, який відрізняється тим, що стержні короткозамкнутої обмотки ротора виконані з міді або іншого матеріалу, що вміщує мідь, вставлені в пази магнітопроводу ротора і зварені або спаяні в торцях з коротко-замикаючими кільцями з аналогічного матеріалу.
Асинхронний електродвигун
Номер патенту: 81804
Опубліковано: 11.02.2008
Автор: Петренко Олександр Миколайович
МПК: H02K 17/16, H02K 1/22
Мітки: електродвигун, асинхронний
Формула / Реферат:
1. Асинхронний електродвигун, який містить зубчастий статор та ротор, набраний з листів електротехнічної сталі з напівзакритими пазами, що мають шліци, вісь кожного з яких зміщена відносно осі паза, який відрізняється тим, що величина зміщення кожного шліца не перевищує 1/8 величини зубцевого кроку ротора, шліци, що виконані у сусідніх пазах, розташовані симетрично відносно осі зубця ротора, а стрижні короткозамкненої обмотки ротора виконані...
Асинхронний тяговий електродвигун

Номер патенту: 21525
Опубліковано: 15.03.2007
Автори: Гавріш Віктор Григорович, Грівін Сергій Анатолійович, Макарєєв Олександр Дмитрович
МПК: H02K 17/02, H02K 5/22
Мітки: електродвигун, асинхронний, тяговий
Формула / Реферат:
1. Асинхронний тяговий електродвигун, що містить корпус, в якому закріплені статор і ротор з короткозамкненою обмоткою, два підшипникових вузли, закріплену на корпусі коробку виводів, що містить клемну високовольтну панель, до якої приєднані вивідні шини обмотки статора, і клемну низьковольтну панель, до якої приєднані вивідні кінці провідників від встановлених на двигуні датчиків ланцюгів керування, який відрізняється тим, що коробка виводів...