Система автоматизованого керування робочим органом транспортної мережі за допомогою радіокерування
Номер патенту: 37635
Опубліковано: 10.12.2008
Формула / Реферат
1. Система автоматизованого керування робочим органом транспортної мережі за допомогою радіокерування, яка складається з робочого органу транспортної мережі, транспортного шляху з навантажувально-розвантажувальними постами, при цьому в робочому органі транспортної мережі встановлений блок пам'яті, забезпечений відповідними командами блока зв'язку, з'єднаного з пультом керування, укомплектованим програмним мікропроцесором, і через блок зв'язку з'єднаного з пультом керування системою і блоком виводу інформації; розвантажувальні перекидачі встановлено біля верстатів; яка відрізняється тим, що на раму радіокерованого робочого органу прикріплено радіоприймачі, а навантажувально-розвантажувальні пости встановлено з можливістю радіокерування електронавантажуваннями робочого органу, при цьому блок пам'яті робочого органу з'єднаний з пультом радіодистанційного керування, який укомплектований програмованим мікропроцесором та блоком виводу інформації з можливістю передачі інформації через блок радіозв'язку.
2. Система автоматизованого керування робочим органом транспортної мережі за допомогою радіокерування за п. 1, яка відрізняється тим, що в кожному з пультів дистанційного радіокерування встановлений приймач та передавач з програмованим мікропроцесором пам'яті, з можливістю радіокерування робочим органом.
3. Система автоматизованого керування робочим органом транспортної мережі за допомогою радіокерування за п. 1, яка відрізняється тим, що вона працює на частоті радіохвиль 27 мГц, сигнал яких модулюється низькою частотою порядку 1 кГц.
4. Система автоматизованого керування робочим органом транспортної мережі за допомогою радіокерування за п. 1, яка відрізняється тим, що для живлення робочого органу застосовано акумуляторні батареї 12 V марки 6 СТ 90 А, а для живлення радіопередавачів використовується батарейка "Крона" напругою 9 V.
Текст
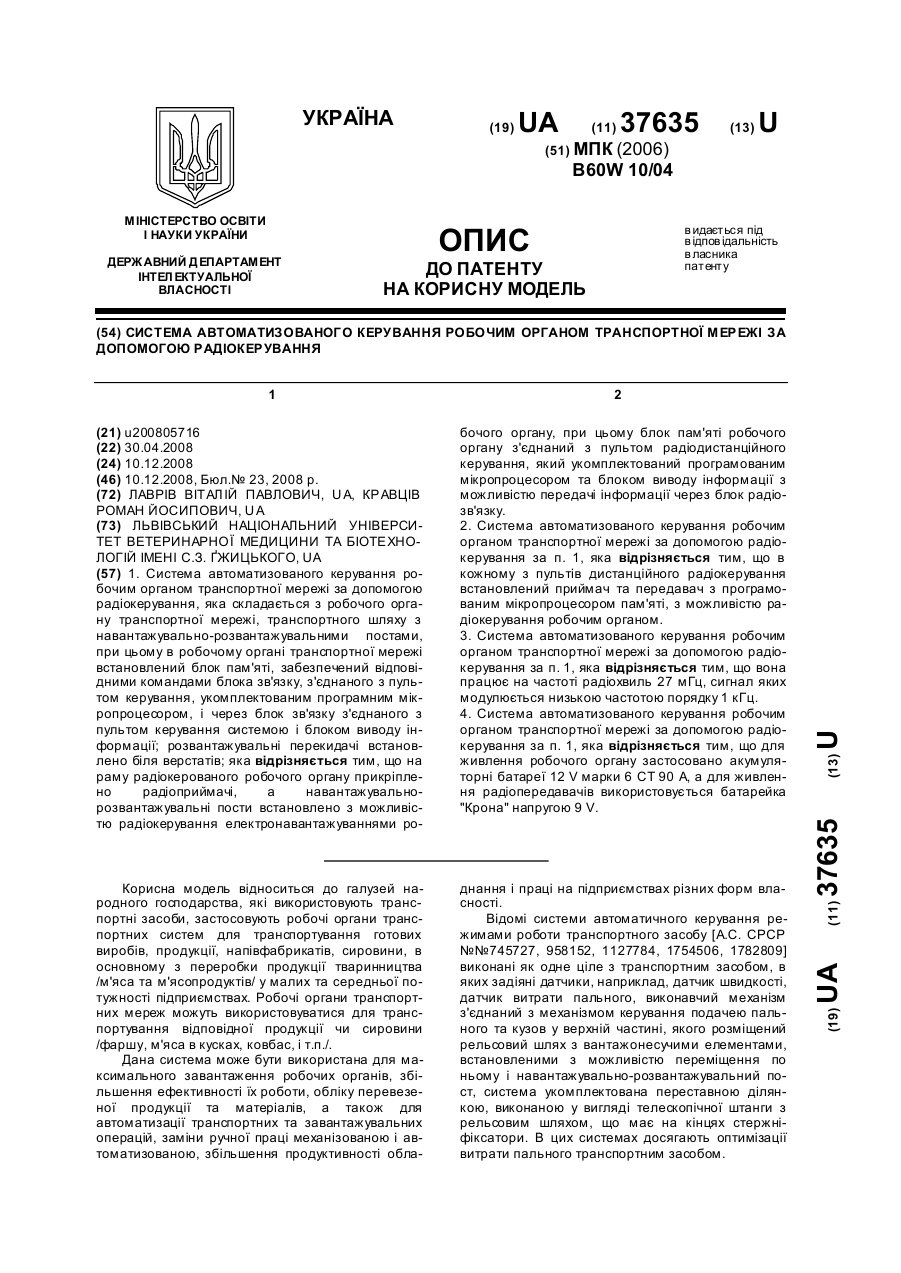
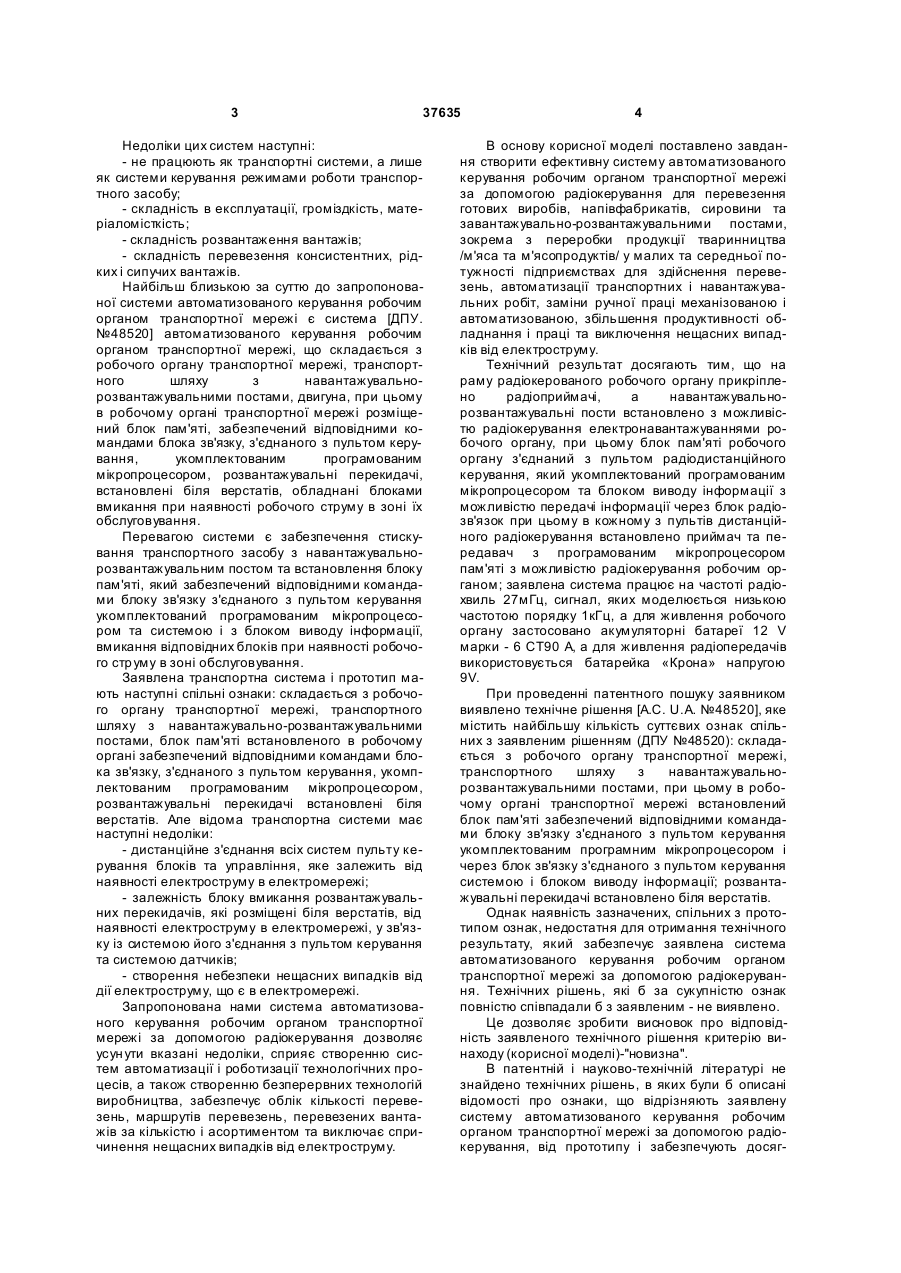
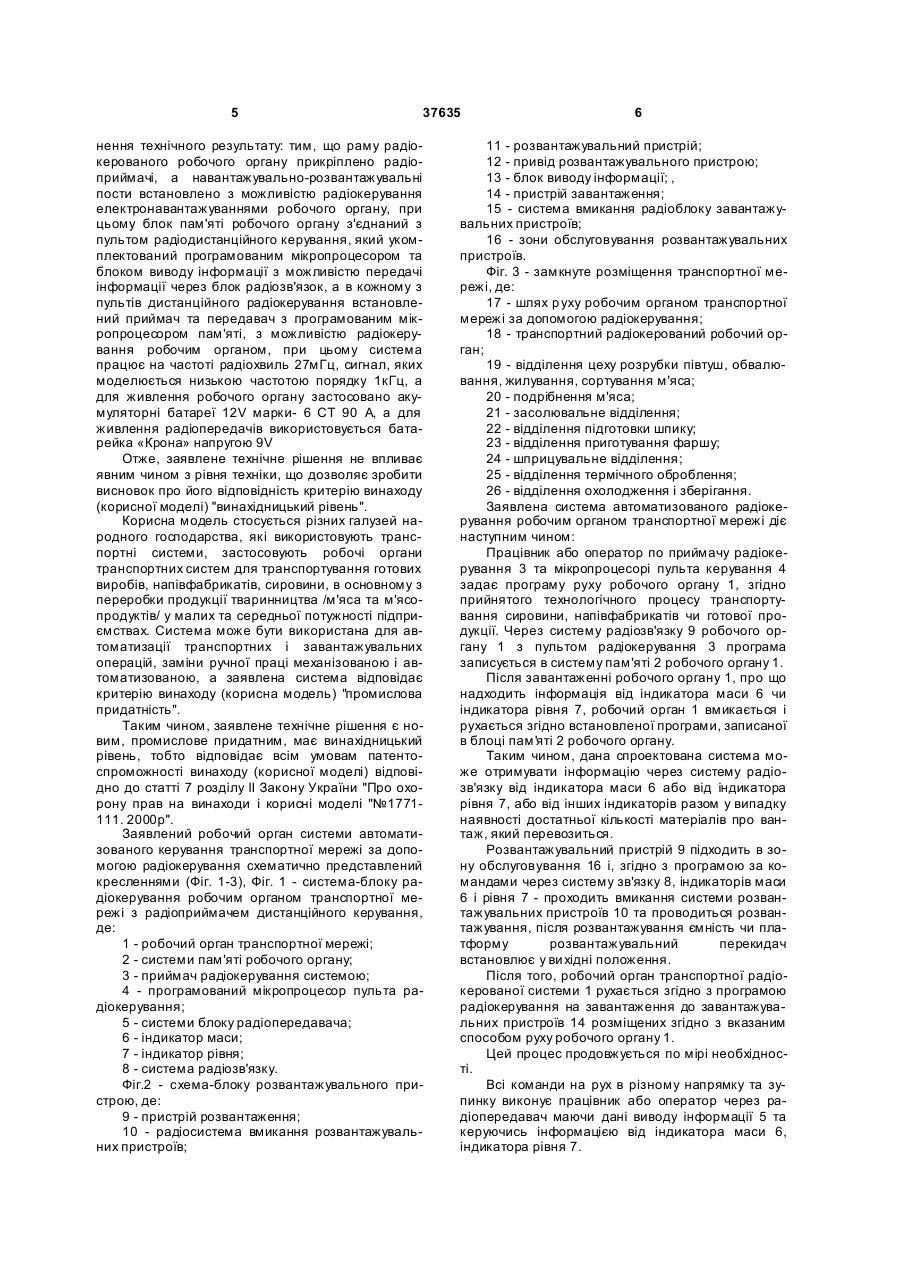
1. Система автоматизованого керування робочим органом транспортної мережі за допомогою радіокерування, яка складається з робочого органу транспортної мережі, транспортного шляху з навантажувально-розвантажувальними постами, при цьому в робочому органі транспортної мережі встановлений блок пам'яті, забезпечений відповідними командами блока зв'язку, з'єднаного з пультом керування, укомплектованим програмним мікропроцесором, і через блок зв'язку з'єднаного з пультом керування системою і блоком виводу інформації; розвантажувальні перекидачі встановлено біля верстатів; яка відрізняється тим, що на раму радіокерованого робочого органу прикріплено радіоприймачі, а навантажувальнорозвантажувальні пости встановлено з можливістю радіокерування електронавантажуваннями ро U 2 (19) 1 3 37635 Недоліки цих систем наступні: - не працюють як транспортні системи, а лише як системи керування режимами роботи транспортного засобу; - складність в експлуатації, громіздкість, матеріаломісткість; - складність розвантаження вантажів; - складність перевезення консистентних, рідких і сипучих вантажів. Найбільш близькою за суттю до запропонованої системи автоматизованого керування робочим органом транспортної мережі є система [ДПУ. №48520] автоматизованого керування робочим органом транспортної мережі, що складається з робочого органу транспортної мережі, транспортного шляху з навантажувальнорозвантажувальними постами, двигуна, при цьому в робочому органі транспортної мережі розміщений блок пам'яті, забезпечений відповідними командами блока зв'язку, з'єднаного з пультом керування, укомплектованим програмованим мікропроцесором, розвантажувальні перекидачі, встановлені біля верстатів, обладнані блоками вмикання при наявності робочого струму в зоні їх обслуговування. Перевагою системи є забезпечення стискування транспортного засобу з навантажувальнорозвантажувальним постом та встановлення блоку пам'яті, який забезпечений відповідними командами блоку зв'язку з'єднаного з пультом керування укомплектований програмованим мікропроцесором та системою і з блоком виводу інформації, вмикання відповідних блоків при наявності робочого стр уму в зоні обслуговування. Заявлена транспортна система і прототип мають наступні спільні ознаки: складається з робочого органу транспортної мережі, транспортного шляху з навантажувально-розвантажувальними постами, блок пам'яті встановленого в робочому органі забезпечений відповідними командами блока зв'язку, з'єднаного з пультом керування, укомплектованим програмованим мікропроцесором, розвантажувальні перекидачі встановлені біля верстатів. Але відома транспортна системи має наступні недоліки: - дистанційне з'єднання всіх систем пульту керування блоків та управління, яке залежить від наявності електроструму в електромережі; - залежність блоку вмикання розвантажувальних перекидачів, які розміщені біля верстатів, від наявності електроструму в електромережі, у зв'язку із системою його з'єднання з пультом керування та системою датчиків; - створення небезпеки нещасних випадків від дії електроструму, що є в електромережі. Запропонована нами система автоматизованого керування робочим органом транспортної мережі за допомогою радіокерування дозволяє усун ути вказані недоліки, сприяє створенню систем автоматизації і роботизації технологічних процесів, а також створенню безперервних технологій виробництва, забезпечує облік кількості перевезень, маршрутів перевезень, перевезених вантажів за кількістю і асортиментом та виключає спричинення нещасних випадків від електроструму. 4 В основу корисної моделі поставлено завдання створити ефективну систему автоматизованого керування робочим органом транспортної мережі за допомогою радіокерування для перевезення готових виробів, напівфабрикатів, сировини та завантажувально-розвантажувальними постами, зокрема з переробки продукції тваринництва /м'яса та м'ясопродуктів/ у малих та середньої потужності підприємствах для здійснення перевезень, автоматизації транспортних і навантажувальних робіт, заміни ручної праці механізованою і автоматизованою, збільшення продуктивності обладнання і праці та виключення нещасних випадків від електроструму. Технічний результат досягають тим, що на раму радіокерованого робочого органу прикріплено радіоприймачі, а навантажувальнорозвантажувальні пости встановлено з можливістю радіокерування електронавантажуваннями робочого органу, при цьому блок пам'яті робочого органу з'єднаний з пультом радіодистанційного керування, який укомплектований програмованим мікропроцесором та блоком виводу інформації з можливістю передачі інформації через блок радіозв'язок при цьому в кожному з пультів дистанційного радіокерування встановлено приймач та передавач з програмованим мікропроцесором пам'яті з можливістю радіокерування робочим органом; заявлена система працює на частоті радіохвиль 27мГц, сигнал, яких моделюється низькою частотою порядку 1кГц, а для живлення робочого органу застосовано акумуляторні батареї 12 V марки - 6 СТ90 А, а для живлення радіопередачів використовується батарейка «Крона» напругою 9V. При проведенні патентного пошуку заявником виявлено технічне рішення [А.С. U.A. №48520], яке містить найбільшу кількість суттєвих ознак спільних з заявленим рішенням (ДПУ №48520): складається з робочого органу транспортної мережі, транспортного шляху з навантажувальнорозвантажувальними постами, при цьому в робочому органі транспортної мережі встановлений блок пам'яті забезпечений відповідними командами блоку зв'язку з'єднаного з пультом керування укомплектованим програмним мікропроцесором і через блок зв'язку з'єднаного з пультом керування системою і блоком виводу інформації; розвантажувальні перекидачі встановлено біля верстатів. Однак наявність зазначених, спільних з прототипом ознак, недостатня для отримання технічного результату, який забезпечує заявлена система автоматизованого керування робочим органом транспортної мережі за допомогою радіокерування. Технічних рішень, які б за сукупністю ознак повністю співпадали б з заявленим - не виявлено. Це дозволяє зробити висновок про відповідність заявленого технічного рішення критерію винаходу (корисної моделі)-"новизна". В патентній і науково-технічній літературі не знайдено технічних рішень, в яких були б описані відомості про ознаки, що відрізняють заявлену систему автоматизованого керування робочим органом транспортної мережі за допомогою радіокерування, від прототипу і забезпечують досяг 5 37635 нення технічного результату: тим, що раму радіокерованого робочого органу прикріплено радіоприймачі, а навантажувально-розвантажувальні пости встановлено з можливістю радіокерування електронавантажуваннями робочого органу, при цьому блок пам'яті робочого органу з'єднаний з пультом радіодистанційного керування, який укомплектований програмованим мікропроцесором та блоком виводу інформації з можливістю передачі інформації через блок радіозв'язок, а в кожному з пультів дистанційного радіокерування встановлений приймач та передавач з програмованим мікропроцесором пам'яті, з можливістю радіокерування робочим органом, при цьому система працює на частоті радіохвиль 27мГц, сигнал, яких моделюється низькою частотою порядку 1кГц, а для живлення робочого органу застосовано акумуляторні батареї 12V марки- 6 СТ 90 А, а для живлення радіопередачів використовується батарейка «Крона» напругою 9V Отже, заявлене технічне рішення не впливає явним чином з рівня техніки, що дозволяє зробити висновок про його відповідність критерію винаходу (корисної моделі) "винахідницький рівень". Корисна модель стосується різних галузей народного господарства, які використовують транспортні системи, застосовують робочі органи транспортних систем для транспортування готових виробів, напівфабрикатів, сировини, в основному з переробки продукції тваринництва /м'яса та м'ясопродуктів/ у малих та середньої потужності підприємствах. Система може бути використана для автоматизації транспортних і завантажувальних операцій, заміни ручної праці механізованою і автоматизованою, а заявлена система відповідає критерію винаходу (корисна модель) "промислова придатність". Таким чином, заявлене технічне рішення є новим, промислове придатним, має винахідницький рівень, тобто відповідає всім умовам патентоспроможності винаходу (корисної моделі) відповідно до статті 7 розділу II Закону України "Про охорону прав на винаходи і корисні моделі "№1771111. 2000р". Заявлений робочий орган системи автоматизованого керування транспортної мережі за допомогою радіокерування схематично представлений кресленнями (Фіг. 1-3), Фіг. 1 - система-блоку радіокерування робочим органом транспортної мережі з радіоприймачем дистанційного керування, де: 1 - робочий орган транспортної мережі; 2 - системи пам'яті робочого органу; 3 - приймач радіокерування системою; 4 - програмований мікропроцесор пульта радіокерування; 5 - системи блоку радіопередавача; 6 - індикатор маси; 7 - індикатор рівня; 8 - система радіозв'язку. Фіг.2 - схема-блоку розвантажувального пристрою, де: 9 - пристрій розвантаження; 10 - радіосистема вмикання розвантажувальних пристроїв; 6 11 - розвантажувальний пристрій; 12 - привід розвантажувального пристрою; 13 - блок виводу інформації; , 14 - пристрій завантаження; 15 - система вмикання радіоблоку завантажувальних пристроїв; 16 - зони обслуговування розвантажувальних пристроїв. Фіг. 3 - замкнуте розміщення транспортної мережі, де: 17 - шлях р уху робочим органом транспортної мережі за допомогою радіокерування; 18 - транспортний радіокерований робочий орган; 19 - відділення цеху розрубки півтуш, обвалювання, жилування, сортування м'яса; 20 - подрібнення м'яса; 21 - засолювальне відділення; 22 - відділення підготовки шпику; 23 - відділення приготування фаршу; 24 - шприцувальне відділення; 25 - відділення термічного оброблення; 26 - відділення охолодження і зберігання. Заявлена система автоматизованого радіокерування робочим органом транспортної мережі діє наступним чином: Працівник або оператор по приймачу радіокерування 3 та мікропроцесорі пульта керування 4 задає програму руху робочого органу 1, згідно прийнятого технологічного процесу транспортування сировини, напівфабрикатів чи готової продукції. Через систему радіозв'язку 9 робочого органу 1 з пультом радіокерування 3 програма записується в систему пам'яті 2 робочого органу 1. Після завантаженні робочого органу 1, про що надходить інформація від індикатора маси 6 чи індикатора рівня 7, робочий орган 1 вмикається і рухається згідно встановленої програми, записаної в блоці пам'яті 2 робочого органу. Таким чином, дана спроектована система може отримувати інформацію через систему радіозв'язку від індикатора маси 6 або від індикатора рівня 7, або від інших індикаторів разом у випадку наявності достатньої кількості матеріалів про вантаж, який перевозиться. Розвантажувальний пристрій 9 підходить в зону обслуговування 16 і, згідно з програмою за командами через систему зв'язку 8, індикаторів маси 6 і рівня 7 - проходить вмикання системи розвантажувальних пристроїв 10 та проводиться розвантажування, після розвантажування ємність чи платформу розвантажувальний перекидач встановлює у ви хідні положення. Після того, робочий орган транспортної радіокерованої системи 1 рухається згідно з програмою радіокерування на завантаження до завантажувальних пристроїв 14 розміщених згідно з вказаним способом руху робочого органу 1. Цей процес продовжується по мірі необхідності. Всі команди на рух в різному напрямку та зупинку виконує працівник або оператор через радіопередавач маючи дані виводу інформації 5 та керуючись інформацією від індикатора маси 6, індикатора рівня 7. 7 37635 В кінці зміни з системи пам'яті 2 робочого органу радіокерованого транспортної мережі 1 через систему радіозв'язку 9 з пультом радіокерування системою 3 виводиться інформація на блок виводу інформації 5 (принтер) про кількість і вид перевезень вантажів та відділення цеху. Запропонована система автоматизованого керування робочим органом транспортної мережі за допомогою радіокерування сприяє створенню сис Комп’ютерна в ерстка Д. Шев ерун 8 тем автоматизації і роботизації технологічних процесів, сприяє створенню безперервних те хнологій виробництва, забезпечує обліку кількості перевезень, маршрутів перевезень, перевезених вантажів за кількістю, якістю і асортиментом та не залежить від наявності електроструму в електромережі сприяє повністю заміні ручної праці автоматизованою, збільшенню продуктивності праці і виключення нещасних випадків від електроструму. Підписне Тираж 28 прим. Міністерство осв іт и і науки України Держав ний департамент інтелектуальної в ласності, вул. Урицького, 45, м. Київ , МСП, 03680, Україна ДП “Український інститут промислов ої в ласності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюSystem of automated control of the operating unit of transport network by means of radio control
Автори англійськоюLavriv Vitalii Pavlovych, Kravtsiv Roman Yosypovych
Назва патенту російськоюСистема автоматизированного управления рабочим органом транспортной сети с помощью радиоуправления
Автори російськоюЛаврив Виталий Павлович, Кравцив Роман Иосифович
МПК / Мітки
МПК: B60W 10/04
Мітки: радіокерування, мережі, робочим, транспортної, допомогою, керування, органом, автоматизованого, система
Код посилання
<a href="https://ua.patents.su/4-37635-sistema-avtomatizovanogo-keruvannya-robochim-organom-transportno-merezhi-za-dopomogoyu-radiokeruvannya.html" target="_blank" rel="follow" title="База патентів України">Система автоматизованого керування робочим органом транспортної мережі за допомогою радіокерування</a>
Система автоматизованого керування робочим органом транспортної мережі
Номер патенту: 48520
Опубліковано: 15.08.2002
Автори: Ощипок Ігор Миколайович, Занічковська Любов Володимирівна
МПК: B60W 10/00
Мітки: автоматизованого, мережі, система, робочим, органом, керування, транспортної
Формула / Реферат:
Система автоматизованого керування робочим органом транспортної мережі, що складається з робочого органа транспортної мережі, транспортного шляху з навантажувально-розвантажувальними постами, двигуна, яка відрізняється тим, що в робочому органі транспортної мережі встановлений блок пам'яті, забезпечений відповідними командами блока зв'язку, з’єднаного з пультом керування, укомплектованим програмованим мікропроцесором, блок пам'яті через блок...
Спосіб керування гідравлічним робочим органом верстата
Номер патенту: 36962
Опубліковано: 10.11.2008
Автори: Коротун Микола Миколайович, Угненко Віталій Петрович
МПК: F15B 9/00
Мітки: гідравлічним, керування, спосіб, робочим, органом, верстата
Формула / Реферат:
Спосіб керування гідравлічним робочим органом верстата,що включає переміщення слідкуючої точки по контуру копіра, передачу позитивного або негативного електричного сигналу на електромеханічний перетворювач, зміщення струминної трубки під дією перетворювача праворуч або ліворуч, зміну тиску робочої рідини у торцевих камерах золотника, зміщення золотника від нейтрального положення, подачу робочої рідини під тиском через золотник в одну з...
Система керування стрілоподібним виконавчим органом
Номер патенту: 37500
Опубліковано: 15.05.2001
Автори: Трубчанін Володимир Вікторович, Антипов Віктор Тимофійович, Трубчанін Віктор Іванович, Колсно Анатолій Прокопович, Данилов Володимир Миколайович
МПК: E21C 27/24
Мітки: виконавчим, система, органом, керування, стрілоподібним
Формула / Реферат:
Система керування стрілоподібним виконавчим органом прохідницького комбайна, що містить гідроциліндри телескопа, повороту і підйому-опускання виконавчого органа, закріпленого на корпусі, напірні та зливні магістралі, помпи, гідроблок керування гідроциліндрами телескопа, гідроблок керування гідроциліндрами повороту і підйому-опускання, силовий гідроблок з розподільниками для забезпечення роботи гідроциліндрів телескопа, повороту і...
Пристрій для керування робочим органом прохідницького щита
Номер патенту: 9366
Опубліковано: 30.09.1996
Автори: Мельников Іван Йосипович, Яроцький Микола Іванович, Гарькавий Володимир Андрійович, Швиченко Олександр Володимирович, Ліндаєв Володимир Вікторович, Фішман Йосип Давидович, Сєров Євген Семенович
МПК: E21C 35/24, E21D 9/06
Мітки: пристрій, керування, прохідницького, щита, робочим, органом
Формула / Реферат:
Устройство для управления рабочим органом проходческой машины, содержащеедва насоса, напорные магистрали с предохранительными и обратными клапанами, два блока соединенных последовательно гидрораспределителей управления гидроцилиндрами рабочего органа и дополнительный пятилинейный гидрораспределитель, один вход которого соединен с напорной магистралью одного из насосов, напорный золотник, обратные клапаны, сливную магистраль, отличающееся...
Система автоматизованого керування й контролю вагона-автомобілевоза

Номер патенту: 37007
Опубліковано: 10.11.2008
Автори: Зибін Віктор Георгійович, Бандура Іван Миколайович, Макаренко Валентин Миколайович, Рачок Микола Миколайович
МПК: H02B 15/00
Мітки: вагона-автомобілевоза, керування, автоматизованого, контролю, система
Формула / Реферат:
Система автоматизованого керування й контролю вагона-автомобілевоза, яка відрізняється тим, що в неї уведені система пожежної сигналізації й блок керування й контролю, що містить джерело живлення, обмежник напруги, перший вихід якого з'єднаний з першим входом блока комутації, а другий його вихід з'єднаний із входом системи контролю нагрівання букс, контролер, перший вихід якого з'єднаний із другим входом блока комутації, а другий його вихід...
Попередній патент: Утримувач одноразового стаканчика
Наступний патент: Спосіб кріоконсервування еритроцитів кордової крові людини
Випадковий патент: Спосіб безпечного формування гармонічного сигналу з використанням широтно-імпульсної модуляції (шім)