Система автоматичного керування вивантажувальним транспортером коренеклубнезбиральної машини
Номер патенту: 71849
Опубліковано: 15.12.2004
Автори: Лебедєв Анатолій Тихонович, Поляшенко Сергій Олексійович

Формула / Реферат
Система автоматичного керування вивантажувальним транспортером ко-ренеклубнезбиральної машини, що містить вивантажувальний транспортер, що включає головну і кінцеву секції, на яких установлені датчики безпеки, які своїми виходами підключені до входів електронного блока керування, у вивантажувальній частині кінцевої секції встановлений датчик відстані, виходом підключений до входу електронного блока керування, перший із виходів якого з'єднаний з електричним входом трипозиційного електрогідророзподілювача, гідравлічний вхід якого з'єднаний із виходом гідронасоса, другий вихід останнього зв'язаний з входом клапана захисного, вихід якого з'єднаний із входом фільтра гідравлічного, вихід фільтра зв'язаний із входом гідробака, вихід якого з'єднаний із гідронасосом, на вивантажувальному транспортері встановлені керовані гідроциліндри головної і кінцевої секцій вивантажувального транспортера, який відрізняється тим, що з метою зниження пошкодження коренеклубнеплодів шляхом підтримання оптимальної висоти вивантаження, вона додатково оснащена датчиком крайнього нижнього положення головної секції транспортера, датчиками крайнього верхнього і крайнього нижнього положень кінцевої секції транспортера, трипозиційним і двопозиційним електрогідророзподілювачами, регулятором потоку, двома гідравлічними замками, двома дроселями зі зворотними клапанами, причому виходи датчиків крайнього нижнього положення головної секції транспортера, крайнього нижнього і крайнього верхнього положень кінцевої секції транспортера з'єднані з входами електронного блока керування, другий і третій виходи якого з'єднані з електричними входами трипозиційного і двопозиційного електрогідророзподілювачів, перші гідравлічні виходи трипозиційних електрогідророзподілювачів, для опускання секцій транспортера, через відповідні гідравлічні замки, дроселі зі зворотними клапанами з'єднані з поршневими порожнинами відповідних гідроциліндрів, другі виходи трипозиційних електрогідророзподілювачів, для підйому секцій транспортера, через гідравлічні замки з'єднані зі штоковими порожнинами відповідних гідроциліндрів, вихід гідронасоса через трипозиційний електрогідророзподілювач з'єднаний із входом регулятора потоку, у якого один із виходів через другий трипозиційний електрогідророзподілювач, гідравлічний фільтр, з'єднаний із гідробаком, другий вихід регулятора потоку через двопозиційний електрогідророзподілювач, гідравлічний фільтр, з'єднаний із гідробаком, при цьому вихід двопозиційного електрогідророзподілювача з'єднаний із штоковими порожнинами гідроциліндрів головної секції транспортера.
Текст
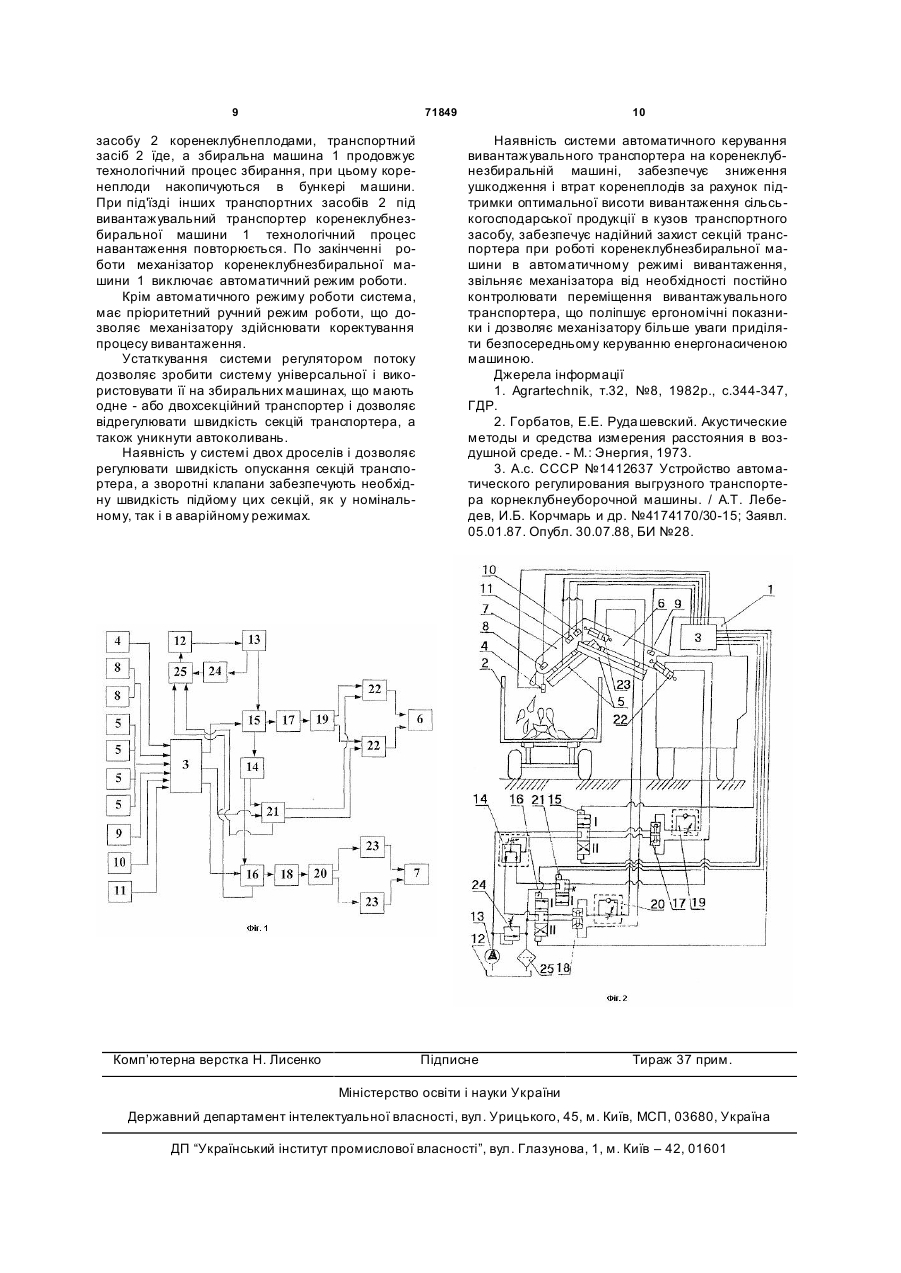
Система автоматичного керування вивантажувальним транспортером коренеклубнезбиральної машини, що містить вивантажувальний транспортер, що включає головну і кінцеву секції, на яких установлені датчики безпеки, які своїми виходами підключені до входів електронного блока керування, у ви вантажувальній частині кінцевої секції встановлений датчик відстані, виходом підключений до входу електронного блока керування, перший із виходів якого з'єднаний з електричним входом трипозиційного електрогідророзподілювача, гідравлічний вхід якого з'єднаний із виходом гідронасоса, другий ви хід останнього зв'язаний з входом клапана захисного, вихід якого з'єднаний із входом фільтра гідравлічного, вихід фільтра зв'язаний із входом гідробака, вихід якого з'єднаний із гідронасосом, на вивантажувальному транспортері встановлені керовані гідроциліндри головної і кінцевої секцій вивантажувального транспортера, який відрізняється тим, що з метою зниження пошкодження коренеклубнеплодів шляхом підтримання оптимальної висоти вивантаження, вона додатково оснащена датчиком крайнього нижнього положення головної 2 (11) 1 Винахід відноситься до сільськогосподарського машинобудування, і може бути використаний для автоматизації процесу перевантаження сільськогосподарської продукції зі збиральної машини в кузов транспортного засобу. Відома система для автоматичного регулювання висоти падіння бульб картоплі [1], що міс тить два ультразвукових датчики відстані, бічні датчики безпеки, електронний блок керування, електрогідророзподілювач, виконавчі гідроциліндри. Датчик відстані вимірює висоту вивантажувального транспортера над кузовом транспортного засобу. Якщо висота, що вимірюється, більше або менше заданої, електронний блок керування 3 виробляє відповідний сигнал на електрогідророзподілювач, що управляє виконавчим гідроциліндром у виді опускання або підйому вивантажувального транспортера. Вивантажувальний транспортер постійно відслідковує висоту вивантаження бульб. При торканні чутливи х елементів бічних датчиків безпеки з бортами або кабіною транспортного засобу, вивантажувальний транспортер за допомогою спеціального підйомника переводиться з робочого положення в безпечне. Недоліком пристрою [1] є застосування ультразвукових датчиків відстані, тому що вони не забезпечують необхідну точність вимірів. На погрішність у вимірі відстаней, при ультразвуковій локації, впливають такі фактори, як вологість середовища, а також вітрові впливи. Так при зміні вологості повітря на 20%, поглинання ультразвуку змінюється приблизно в 4 рази [2, стор.26]. Звуковий тиск у звукоприймачі може змінюватись на кілька порядків, з цієї причини ультразвукові прилади ненадійні в експлуатації [2, стор.26]. Тому пристрій [1], установлений на мобільній машині, що працює на відкритій місцевості, при силі вітру 7-8м/с при локації перешкоди на відстані 100 см амплітуда вихідного сигналу звукоприймача змінюється в деякі моменти часу в 10 разів і має місце переривання сигналу в звукоприймачі [2, стор.28, 29, рис.10]. У результаті погрішності ультразвукового методу виміру відстані між вивантажувальним транспортером і коренеклубнеплодами в кузові транспортного засобу, використання цього методу обмежується експериментальними дослідженнями. Недоліком пристрою є неможливість регулювання швидкостей підйому й опускання транспортера, а також відсутність захисту транспортера знизу, де так само з великою імовірністю можливі зіткнення з бічним бортом транспортного засобу. Недоліком пристрою [1] є також керування тільки однією секцією транспортера, що не дозволяє підтримувати оптимальну висоту вивантаження, що веде до ушкодження сільськогосподарської продукції. Найбільш близьким технічним рішенням до передбачуваного винаходу, є пристрій автоматичного регулювання вивантажувального транспортера коренеклубнезбиральної машини [3], що містить електронний блок керування, датчик відстані, датчик безпеки, трьохпозиційний електрогідророзподілювач, виконавчі циліндри вертикального приводу транспортера. Цей пристрій автоматично здійснює керування секцією транспортера, витримуючи задану висоту навантаження. При торканні чуттєвого елемента датчиків безпеки об борт або кабіну транспортного засобу, відбувається прискорений підйом транспортера в крайнє верхнє положення з зупинкою транспортної стрічки. Після ліквідації предаварійної ситуації процес вивантаження продовжується. Недоліком пристрою є високі швидкості підйому й опускання транспортера, неможливість через різні маси і моменти інерції секцій транспортера, регулювання швидкостей, що викликає автоколивання транспортера і погіршує стійкість збиральної машини. Також недоліком є наявність 71849 4 однієї регульованої секції транспортера, що не дозволяє встановлювати оптимальну висоту вивантаження при навантаженні коренеклубнеплодів у кузов транспортного засобу з високими бортами, що викликає додаткові пошкодження і втрати сільськогосподарської продукції. Задача винаходу - зниження пошкодження коренеклубнеплодів шляхом підтримання оптимальної висоти вивантаження. Поставлена задача досягається тим, що система автоматичного керування вивантажувальним транспортером коренеклубнезбиральної машини, що містить вивантажувальний транспортер, що включає головну і кінцеву секцію, на яких установлені датчики безпеки, які своїми виходами підключені до входів електронного блока керування, у вивантажувальній частині кінцевої секції встановлений датчик відстані, виходом підключений до входу електронного блока керування, перший із виходів якого з'єднаний з електричним входом трьохпозиційного електрогідророзподілювача, гідравлічний вхід якого з'єднаний із виходом гідронасоса, другий вихід останнього зв'язаний с входом клапанна захисного, ви хід якого з'єднаний із входом фільтра гідравлічного, вихід фільтра зв'язаний із входом гідробака, вихід якого з'єднаний із гідронасосом, на вивантажувальному транспортері встановлені керовані гідроциліндри головної і кінцевої секцій вивантажувального транспортера, згідно винаходу, додатково постачена датчиком крайнього нижнього положення головної секції транспортера, датчиками крайнього верхнього і крайнього нижнього положень кінцевої секції транспортера, трьохпозиційним і двохпозиційним електрогідророзподілювачами, регулятором потоку, двома гідравлічними замками, двома дроселями зі зворотними клапанами, причому ви ходи датчиків крайнього нижнього положення головної секції транспортера, крайнього нижнього і крайнього верхнього положення кінцевої секції транспортера з'єднані з входами електронного блока керування, другий і третій виходи якого з'єднані з електричними входами трьохпозиційного і двохпозиційного електрогідророзподілювачей, перші гідравлічні виходи трьохпозиційних електрогідророзподілювачей, для опускання секцій транспортера, через відповідні гідравлічні замки, дроселі зі зворотними клапанами з'єднані з поршневими порожнинами відповідних гідроциліндрів, вхідні виходи трьохпозиційних електрогідророзподілювачей, для підйому секцій транспортера, через гідравлічні замки з'єднані зі штоковими порожнинами відповідних гідроциліндрів, вихід гідронасоса через трьохпозиційний електрогідророзподілювач з'єднаний із входом регулятора потоку, у якого один із виходів через другий трьохпозиційний електрогідророзподілювач, гідравлічний фільтр, з'єднаний із гідробаком, другий вихід регулятора потоку через двохгпозиційний електрогідророзподілювач, гідравлічний фільтр, з'єднаний із гідробаком, при цьому вихід двохпозиційного електрогідророзподілювача з'єднаний із штоковими порожнинами гідроциліндрів головної секції транспортера. 5 На Фіг.1 показана функціональна схема збирального комплексу, з встановленою на коренеклубнезбиральній машині системою автоматичного керування вивантажувальним транспортером, на Фіг.2 представлена блок-схема системи. Система автоматичного керування вивантажувальним транспортером машини 1 (Фіг.1) при вивантаженні коренеплодів у кузов поруч їдучого транспортного засобу 2, містить електронний блок 3 керування, датчик 4 відстані, чотири бортових датчики 5 безпеки головної 6 і кінцевої 7 секцій транспортера, два бокових датчика 8 безпеки, датчик 9 крайнього нижнього положення головної 6 секції транспортера, датчик 10 крайнього нижнього положення, датчик 11 крайнього верхнього положення кінцевої 7 секції транспортера, гідробак 12 для робочої рідини, гідронасос 13, регулятор потоку 14, два трьохпозиційніх електрогідророзподілювача 15, 16, два гідро-замки 17, 18, два дроселя 19, 20 зі зворотними клапанами, двохпозиційній електрогідророзподілювач 21, два виконавчих гідроциліндри 22 головної 6 секції транспортера, два виконавчих гідроциліндри 23 кінцевої 7 секції транспортера, клапан запобіжний 24, і фільтр гідравлічний 25. Електронний блок 3 керування являє собою універсальний автомат, що працює по твердій логіці, що, аналізуючи інформацію з датчика 4 відстані, бортових датчиків 5 безпеки, бічних датчиків 8 безпеки, датчика 9 крайнього нижнього положення головної 6 секції транспортера, датчиків 10, 11 крайнього нижнього положення і крайнього верхнього положення кінцевої 7 секції транспортера, виробляє керуючий сигнал, що надходить у електрогідророзподілювачі 15, 16, 21 і який реалізується виконавчими гідроциліндрами 22, 23. Датчик 4 відстані і бічні датчики 8 безпеки встановлені на кінцевій 7 секції транспортера у вивантажувальній її частині, причому бічні датчики 8 безпеки встановлені по обох сторонах кінцевої 7 секції. Датчик 4 відстані і бічні датчики 8 безпеки виконані у виді інфрачервоного локатора. Бортові датчики 5 безпеки встановлені по обох сторонах головної 6 і кінцевої 7 секціях транспортера, із взаємним перетинанням у зоні зчленування секцій вивантажувального транспортера. Датчики положення 9, 10, 11 секцій 6, 7 транспортера призначені для подачі сигналу в електронний блок З керування при досягненні секціями 6, 7 транспортера своїх крайніх положень і регулювання меж робочої зони секцій транспортера в процесі вивантаження. Бортові датчики 5 безпеки, датчик 9 крайнього нижнього положення головної 6 секції транспортера, датчики 10, 11 крайнього нижнього положення кінцевої 7 секції транспортера являють собою тактильні датчики. Датчик 4 відстані (Фіг.2) бортові датчики 5 безпеки, бічні датчики 8 безпеки, датчик 9 крайнього нижнього положення головної 6 секції транспортера і датчики 10, 11 крайнього нижнього положення і крайнього верхнього положення кінцевої 7 секції транспортера своїми виходами з'єднані з входами електронного блоку 3 керування, виходи якого з'єднані з електромаг 71849 6 нітами трьохпозиційних електрогідророзподілювачів 15, 16 і двохпозиційного електрогідророзподілювача 21. Троьхпозиційні електрогідророзподілювачі 15, 16 служать для керування відповідними гідроциліндрами 22, 23 головної 6 і кінцевої 7 секцій транспортера в номінальному режимі роботи системи. Двохпозиційний електрогідророзподілювач 21 використовується в аварійних режимах роботи для прискореного підйому головної 6 секції транспортера. Регулятор 14 потоку дозволяє регулювати тиск і швидкість робочої рідини в системі, усун ути автоколивання. Дроселі зі зворотними клапанами 19, 20 дозволяють регулювати швидкості підйому й опускання секцій транспортера 6, 7 у номінальному і аварійному режимах. Вихід гідробака 12 зв'язаний із входом гідронасоса 13, вихід якого через трьохпозиційних електрогідророзподілювач 15 з'єднаний регулятором потоку 14, один з виходів якого через трьохпозиційний електрогідророзподілювач 16, гідравлічний фільтр 25 з'єднаний із входом гідробака 12, а другий вихід регулятора потоку 14 через двохпозиційний електрогідророзподілювач 21, гідравлічний фільтр 25 з'єднаний з гідробаком 12. Перші гідравлічні виходи трьохпозиційних електрогідророзподілювачей 15, 16 для опускання секцій 6, 7 транспортера, через відповідні гідрозамки 17, 18 і дроселі зі зворотними клапанами 19, 20 з'єднані з поршневими порожнинами відповідних гідроциліндрів 22, 23, а другі виходи трьохпозиційних електрогідророзподілювачей 15, 16 для підйому секцій 6, 7 транспортера з'єднані через гідрозамки 17, 18 зі штоковими порожнинами відповідних гідроциліндрів 21, 22, а вихід двохпозиційного електрогідророзподілювача 21 з'єднаний зі штоковими порожнинами гідроциліндрів головної секції транспортера. Система працює таким способом: транспортний засіб 2 заїжджає під вивантажувальний транспортер коренеклубнезбиральної машини 1, що знаходиться в крайнім верхнім положенні. Збиральний комплекс починає рухатися паралельним курсом. Ме ханізатор коренеклубнезбиральної машини 1 включає автоматичний режим роботи системи автоматичного керування вивантажувальним транспортером коренеклубнезбиральної машини. Датчик 4 відстані вимірює висоту вивантаження коренеплодів у к узов транспортного засобу 1. Інформація про відстань надходить в електронний блок 3 керування і порівнюється з заданим значенням. Оскільки фактична висота вивантаження в початковий момент більше заданої, то електронний блок керування 3 виробляє керуючий сигнал для впливу на електромагніт трьохпозиційного електрогідророзподілювача 15 головної 6 секції транспортера. Плунжер трьохпозиційного електрогідророзподілювача 15 займає положення І, при цьому потік робочої рідини від гідронасоса 13 проходить через трьохпозіційний електрогідророзподілювач 15, гідрозамок 17, дросель 19 зі зворотним клапаном і попадає в поршневу порожнину гідроциліндрів 22 головної 6 секції транс 7 портера. Відбувається опускання головної 6 секції транспортера. Потік робочої рідини зі штокової порожнини гідроциліндрів 22 проходить через гідрозамок 17, трьохпозіційний електрогідророзподілювач 15, плунжер якого знаходиться в положенні І, регулятор потоку 14, трьохпозіційний електрогідророзподілювач 16, плунжер якого знаходиться в нейтральному положенні, гідравлічний фільтр 25 і йде на злив у гідробак 12. Друга частина потоку робочої рідини з регулятору потоку 14 через двохпозіційний електрогідророзподілювач 21, плунжер якого знаходиться в нейтральному положенні, гідравли-чний фільтр 25, йде на злив в гідробак 12. Датчик відстані 4 постійно вимірює відстань і видає інформацію в електронний блок 3 керування. Оскільки фактична висота вивантаження більше заданої, то електронний блок 4 керування продовжує виробляти керуючий сигнал для впливу на електромагніт трьохпозіційного електрогідророзподілювача 15 на опускання головної 6 секції транспортера. Головна 6 секція транспортера з проміжних положень займає крайнє нижнє положення головної 6 секції транспортера. Сигнал з датчика 9 крайнього нижнього положення головної 6 секції транспортера надходить в електронний блок 3 керування, обробляється ньому й електронний блок 3 керування виробляє керуючі сигнали на електромагніти трьох-позиційних електрогідрорасподілювачей 15, 16. При цьому плунжер трьох-позиційного електрогідророзподілювача 15 переміститься з положення 1 у нейтральне, а плунжер трьохпозиційного електрогідророзподілювача 16 - з нейтрального положення в положення І. Потік робочої рідини від гідронасоса 13 переміщується через трьохпозіційний електрогідророзподілювач 15, плунжер якого знаходиться в нейтральному положенні, регулятор потоку 14, трьохпозіційний електрогідророзподілювач 16, плунжер якого знаходиться в положенні І, гідрозамок 18, дросель 20 зі зворотним клапаном попадає в поршневу порожнину гідроциліндрів 23 кінцевої 7 секції транспортера. Відбувається опускання кінцевої 7 секції транспортера. Інша частина потоку робочої рідини, що ви ходить з регулятора потоку 14 проходить через двохпозиційнй електрогідророзподілювач 21, гідравлічний фільтр 25 і йде у гідробак 12 коренеклубнезбиральної машини. При рівності відстаней дійсної і заданої, транспортер готовий до вивантаження. У процесі вивантаження купа коренеклубнеплодів у к узові транспортного засобу збільшується, відстань між купою і транспортером зменшується. Датчик 4 відстані постійно вимірює цю висоту і працює в приймально-передавальному режимі. При фактичній відстані, меншій за задану, електронний блок 3 керування виробляє керуючий сигнал на електромагніт трьохпозиційоного електрогідророзподілювача 16. Плунжер цього електрогідророзподілювача переміщується в положення II, при цьому потік робочої рідини йде через трехпозиційний електрогідророзподілювач 15, регулятор потоку 14, трехпозиційний електрогідророзподілювач 16, гідрозамок 18, штокову порожнину 71849 8 гідроциліндра 23, при цьому кінцева 7 секція транспортера піднімається. Інша частина потоку робочої рідини з регулятора потоку 14 йде через двохпозиційний електрогідророзподільник 21, гідравлічний фільтр 25, на злив. Таким чином, транспортер "відслідковує" висоту падіння коренеплодів у заданих межах. По мірі росту купи коренеплодів у кузові транспортного засобу 1, кінцева 7 секція транспортера піднімається. При досягненні кінцевою 7 секцією транспортера крайнього верхнього положення, спрацьовує датчик 11 крайнього верхнього положення кінцевої 7 секції транспортера. Сигнал з цього датчика надходить в електронний блок З керування, що виробляє керуючі сигнали на електромагніти трьохпозіційних електрогідророзподілювачів 15, 16. При цьому в трьохпозіційному електрогідророзподілювачі 16 плунжер з положення П переміститься в нейтральне положення, а плунжер електрогідророзподілювача 15 - з нейтрального положення в положення II. Потік робочої рідини з гідронасоса 13 через трьохпозіційний електрогідророзподілювач 15, гідрозамок 17, йде в штокову порожнину гідроциліндрів 22. Головна 6 секція транспортера піднімається. Робоча рідина з поршневої порожнини гідроциліндрів 22, через дросель 19 зі зворотним клапаном, гідрозамок 17, трьохпозіційний електрогідророзподілювач 15, регулятор потоку 14, трьохпозіційний електрогідророзподілювач 16, гідравлічний фільтр 25 йде на злив у гідробак 12 коренеклубнезральної машини 1. Інша частина потоку робочої рідини з регулятора потоку 14 йде через двохпозиційний електрогідророзподілювач 21, гідравлічний фільтр 25 на злив у гідробак 12. При торканні чуттєвого елемента бортових датчиків 5 безпеки або бічних датчиків 8 безпеки кабіни або бортів транспортного засобу 1, сигнал з датчика безпеки надходить в електронний блок 3 керування. Електронний блок 3 керування виробляє керуючі сигнали на електромагніти трьохпозиційного електрогідророзподілювача 15, і двохпозиційного електрогідророзподілювача 21, при цьому плунжери цих електро-гідророзподілювачів займуть положення II. Потік робочої рідини від гідронасоса 13 надходить через трьохпозиційний електрогідророзподілювач 15, гідрозамок 17 у штокову порожнину гідроциліндрів 22 головної секції 6 транспортера. Потік робочої рідини з поршневої порожнини гідроциліндрів 22 через дросель 19 зі зворотним клапаном, гідрозамок 17, трьохпозіційний електрогідророзподілювач 15, регулятор потоку 14, двохпозиційнний електрогідроросподілювач 21 надходить у штокову порожнину гідроциліндрів 22 головної 6 секції транспортера. Відбувається прискорений підйом головної 6 секції транспортера на безпечну висоту вивантаження. Інша частина робочої рідини з регулятора потоку 14 через трьохпозіційний електрогідророзподілювач 16, гідравлічний фільтр 25 йде в гідробак 12 коренеклубнезби-ральної машини 1. Після ліквідації предаварійної ситуації, процес вивантаження продовжується в номінальному режимі роботи до повного заповнення кузова транспортного засобу 2. При заповненні кузова транспортного 9 71849 засобу 2 коренеклубнеплодами, транспортний засіб 2 їде, а збиральна машина 1 продовжує технологічний процес збирання, при цьому коренеплоди накопичуються в бункері машини. При під'їзді інших транспортних засобів 2 під вивантажувальний транспортер коренеклубнезбиральної машини 1 технологічний процес навантаження повторюється. По закінченні роботи механізатор коренеклубнезбиральної машини 1 виключає автоматичний режим роботи. Крім автоматичного режиму роботи система, має пріоритетний ручний режим роботи, що дозволяє механізатору здійснювати коректування процесу вивантаження. Устаткування системи регулятором потоку дозволяє зробити систему універсальної і використовувати її на збиральних машинах, що мають одне - або двохсекційний транспортер і дозволяє відрегулювати швидкість секцій транспортера, а також уникнути автоколивань. Наявність у системі двох дроселів і дозволяє регулювати швидкість опускання секцій транспортера, а зворотні клапани забезпечують необхідну швидкість підйому цих секцій, як у номінальному, так і в аварійному режимах. Комп’ютерна верстка Н. Лисенко 10 Наявність системи автоматичного керування вивантажувального транспортера на коренеклубнезбиральній машині, забезпечує зниження ушкодження і втрат коренеплодів за рахунок підтримки оптимальної висоти вивантаження сільськогосподарської продукції в кузов транспортного засобу, забезпечує надійний захист секцій транспортера при роботі коренеклубнезбиральної машини в автоматичному режимі вивантаження, звільняє механізатора від необхідності постійно контролювати переміщення вивантажувального транспортера, що поліпшує ергономічні показники і дозволяє механізатору більше уваги приділяти безпосередньому керуванню енергонасиченою машиною. Джерела інформації 1. Agrartechnik, т.32, №8, 1982р., с.344-347, ГДР. 2. Горбатов, Е.Е. Руда шевский. Акустические методы и средства измерения расстояния в воздушной среде. - М.: Энергия, 1973. 3. А.с. СССР №1412637 Устройство автоматического регулирования выгрузного транспортера корнеклубнеуборочной машины. / А.Т. Лебедев, И.Б. Корчмарь и др. №4174170/30-15; Заявл. 05.01.87. Опубл. 30.07.88, БИ №28. Підписне Тираж 37 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюSystem of automated control of unloading conveyer of root and tuber harvester
Автори англійськоюLebediev Anatolii Tykhonovych
Назва патенту російськоюСистема автоматического управления выгрузным транспортером корнеклубнеуборочной машины
Автори російськоюЛебедев Анатолий Тихонович
МПК / Мітки
МПК: A01B 69/00
Мітки: машини, транспортером, автоматичного, коренеклубнезбиральної, керування, система, вивантажувальним
Код посилання
<a href="https://ua.patents.su/5-71849-sistema-avtomatichnogo-keruvannya-vivantazhuvalnim-transporterom-koreneklubnezbiralno-mashini.html" target="_blank" rel="follow" title="База патентів України">Система автоматичного керування вивантажувальним транспортером коренеклубнезбиральної машини</a>
Система автоматичного керування насосними агрегатами
Номер патенту: 41430
Опубліковано: 17.09.2001
Автори: Шовкопляс Іван Петрович, СТЕЦКО МИХАЙЛО ГРИГОРОВИЧ
МПК: G05D 9/00
Мітки: автоматичного, насосними, керування, система, агрегатами
Формула / Реферат:
1. Система автоматичного керування насосними агрегатами, яка складається з випрямлячів змінної напруги сигналів, підсилювачів постійного струму, входами з'єднаних з виходами випрямлячів змінної напруги сигналів, пристрою керування, входами з'єднаного з виходами випрямлячів змінної напруги сигналів, виходом схеми захисту електродвигуна від аварійних режимів роботи, вхід якої з'єднано з виходами трансформаторів струму, виходом схеми захисту...
Система автоматичного керування рухом судна за курсом
Номер патенту: 54147
Опубліковано: 17.02.2003
Автор: Бугрім Леонід Іванович
МПК: B63B 45/00, B63B 49/00, B63H 25/00
Мітки: керування, судна, система, автоматичного, рухом, курсом
Формула / Реферат:
Система автоматичного керування рухом судна за курсом, що містить прилад керування, кермовий привід, у складі якого є виконавчий механізм, кермова машина, пристрій основного внутрішнього зворотного зв'язку, судно як об'єкт керування з пером керма, яка відрізняється тим, що в ній паралельно до виходу пристрою основного внутрішнього зворотного зв'язку установлено пристрій додаткового зворотного зв'язку і виходи пристроїв додаткового й основного...
Система автоматичного водіння самохідної колісної машини
Номер патенту: 71847
Опубліковано: 15.12.2004
Автори: Поляшенко Сергій Олексійович, Парфьонова Наталя Сергійовна
МПК: A01B 69/04
Мітки: автоматичного, самохідної, колісної, система, машини, водіння
Формула / Реферат:
Система автоматичного водіння самохідної колісної машини, що містить регулятор, виконавчий елемент, датчик копіювання, датчик положення керуючих коліс і суматор, яка відрізняється тим, що з метою підвищення точності відстеження заданої траєкторії, введені регульований інтегратор і датчик швидкості, причому регульований інтегратор включений послідовно між додатковим входом суматора і виходом датчика копіювання, а ланцюг керування коефіцієнтом...
Система автоматичного керування процесом горіння
Номер патенту: 53941
Опубліковано: 17.02.2003
Автори: Грунський Віталій Павлович, Кашина Тетяна Олександрівна, Кашин Володимир Іванович, Бегунов Микола Павлович
МПК: F23N 1/02
Мітки: керування, горіння, система, процесом, автоматичного
Формула / Реферат:
Система автоматичного керування процесом горіння, що містить з'єднані в технологічній послідовності пальник, електроди підпалювання та наявності полум'я, трансформатор, автомат керування роботою пальника, клапан-відсікач газу, регулятор співвідношення газ/повітря, дросельну заслінку з електроприводом та перетворювач термоелектричний, яка відрізняється тим, що в електричний ланцюг регулювання потужності пальника введено мікропроцесорний...
Пристрій для автоматичного керування і регулювання руху самохідної машини по рядках рослин

Номер патенту: 56641
Опубліковано: 15.05.2003
Автори: Білик Стефанія Григорівна, Гевко Іван Богданович
МПК: A01B 69/04
Мітки: автоматичного, регулювання, самохідної, керування, пристрій, машини, рослин, руху, рядках
Формула / Реферат:
Пристрій для автоматичного керування і регулювання руху самохідної машини по рядках рослин, що містить керований міст з колесами, на якому встановлений гідроциліндр, корпус якого шарнірно з'єднаний з керованим мостом, а шток через тягу зв'язаний з рульовою трапецією повороту коліс, а також копіюючий щуп, зв’язаний з помпою-дозатором автомата, кермо, зв'язане з помпою-дозатором керма, гідросистему, виконану у вигляді масляного бака, помпи,...
Попередній патент: Система автоматичного водіння самохідної колісної машини
Наступний патент: Спосіб одержання експертних оцінок з урахуванням індивідуального сприйняття експерта
Випадковий патент: Корпус букси для колісних пар вантажного вагона