Пристрій для вимірювання лінійних розмірів об’єкту
Номер патенту: 5162
Опубліковано: 28.12.1994
Автори: Гоцалюк Юрій Борисович, Осецький Юрій Михайлович, Значковський Борис Миколайович
Формула / Реферат
Устройство для измерения линейных размеров объекта, содержащее n датчиков положения поверхности измеряемого объекта и источник опорного напряжения, выполненные в виде поворотных трансформаторов, источник питающего напряжения, схему суммирования, n регулируемых резисторов по числу датчиков положения поверхности измеряемого объекта, подключенный к выходу схемы суммирования регистратор, первичные обмотки поворотных трансформаторов датчиков положения поверхности измеряемого объекта подключены последовательно между собой и параллельно источнику питающего напряжения и первичной обмотке поворотного трансформатора, источник опорного напряжения, вторичные обмотки поворотных трансформаторов датчиков положения поверхности измеряемого объекта и вторичная обмотка источника опорного напряжения подключены к соответствующим входам схемы суммирования, отличающееся тем, что, с целью повышения точности, оно снабжено (n+1)-ым регулируемым резистором, включенным между одной из клемм источника питающего напряжения и регулируемым резистором n-го датчика положения поверхности измеряемого объекта, схема суммирования снабжена (n+1) переключателем по числу входов, неподвижные контакты каждого из переключателей являются выходами вторичных обмоток поворотных трансформаторов соответствующих датчиков положения поверхности измеряемого объекта и источника опорного напряжения, подвижный контакт каждого из переключателей, начиная со второго, подключен к второму неподвижному контакту соответствующего предыдущего переключателя, подвижный контакт первого переключателя и второй неподвижный контакт (n+1 )-го переключателя подключены к соответствующим входам регистратора, а каждый из n регулируемых резисторов включен параллельно первичной обмотке поворотного трансформатора соответствующего датчика положения поверхности контролируемого объекта.
Текст
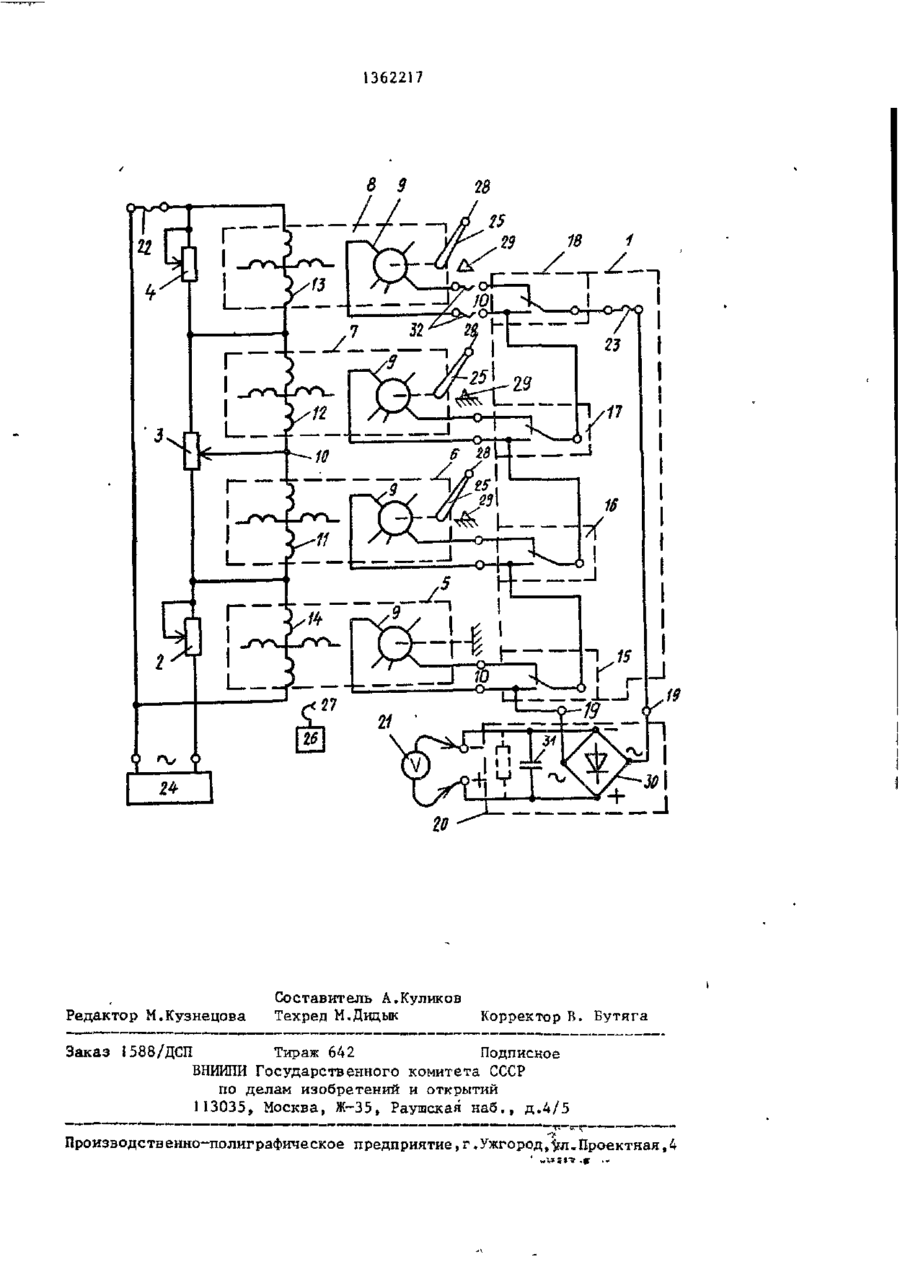
Изобретение относится к измерительной технике и может быть использовано, например, для измерения и регулирования диаметра пленочного рукава в производстве полимерных пленочных изделий. Целью изобретения является повышение точности измерений за счет уменьшения погрешности при юстировке датчиков, В процессе измерений ролики 28, установленные на рычагах 25, контактируют с измеряе 47-87 мым объектом (на чертеже не показан). Рычаги 25 в свою очередь кинематически связаны с датчиками 6-8 положения поверхности измеряемого объекта, вы- . полненными в виде поворотных трансформаторов . Сигналы с вторичных обмоток 9 поворотных трансформаторов датчиков 6-8 поступают на схему 1 суммирования, на один из входов которой поступает также сигнал с источника 5 опорного напряжения, выполненного также в виде поворотного трансформатора. Суммарный сигнал, пропорциональный измеряемой величине (например, отклонения диаметра от номинала) , с выхода схемы I суммирования поступает на пиковый детектор 20 и с него на измерительный прибор 21. Симметрирование датчиков осуществляется с помощью регулируемых резисторов 3 и 4, подключаемых к первичным обмоткам поворотных трансформаторов датчиков 6-8. Сначала с помощью регулируемого резистора 3 симметрируются датчики 6 и 7 путем поочередного подключения их с помощью переключателей 16 и 1 7 к измерительному прибору 21. Юстировка устройства осуществляется регулируемым резистором 2 при подключенных датчиках 6-8 и источнике 5 опорного напряжения. 1 ил. 1362217 Изобретение относится к измерительной технике и может быть использовано, например, для измерения и регулирования диаметра пленочного рукава в производстве полимерных пленочных изделий. Целью изобретения является повышение точности измерений за счет уменьшения погрешности при юстировке датчиков. На чертеже представлена схема устройства, содержащая в качестве примера три датчика положения поверхности объекта. Устройство содержит схему 1 суммирования, регулируемые резисторы 2-4, выполненные в виде поворотных трансформаторов источник 5 опорного напряжения и датчики 6-^8 положения поверхности измеряемого объекта, у которых вторичные обмотки 9 подключены к'входам 10 схемы I суммирования. Первичные обмотки 11-13 датчиков 6-8 соединены между собой последовательно и параллельно входу первичной обмотки 14 источника 5 опорного напряжения. Схема суммирования 1 содержит переключатели 15-18, количество которых равно количеству входов схемы. Выходом схемы суммирования служат концы 19 цепи, состоящей из последовательно соединенных замыкающих контактов переключателей 1518. К выходу 19 схемы 1 суммирования подключен пиковый детектор 20 с измерительным прибором 21 постоянного тока на выходе, образующие регистратор. Параллельно каждой из первичных обмоток 11—13 датчиков 6-8 подключены регулируемый резистор 4 или участки регулируемого резистора 3 (для обмоток 11 и 12), Для удобства симметрирования датчиков при юстировке устройства оно содержит только одну пару датчиков 6 и 7, первичные обмотки которых снабжены общим регулируемым резистором 3. В случае, если устройство содержит более трех датчиков положения поверхности измеряемого объекта, эти датчики подключаются вместо перемычек 22 и 23. При трех датчиках и более (могут подключаться вместо перемычек 22 и 23) третий и последующие датчики снабжены только индивидуальными регулируемыми резисторами 4, Обмотки II 5 10 15 20 25 30 35 40 45 14 питаются стабилизированным по амплитуде переменным напряжением, например, от феррорезонансного стаби-о • лиэатора 24 напряжения. Каждый из рычагов 25 снабжен узлом для его фиксации в положении, перпендикулярном плоскости измерения размеров измеряемого объекта. Когда плоскость измерения горизонтальна, в качестве такого устройства может использоваться, например, груз 26 с узлом 27 его крепления к роликам 28 качающихся контактных рычагов 25. Упоры 29 предназначены для фиксации рычагов 25 в их нулевом положении. Датчики 6-8 установлены вокруг пленочного рукава (объекта измерения) так, чтобы ролики 28 подпружиненных рычагов 25 контактировали с образующими рукава (на чертеже не показано). В процессе работы устройство преобразует суммарное перемещение роликов 28 в амплитуду напряжения на выходе 19 схемы 1 суммирования. Линейность градуировочной характеристики устройства и ее независимость от питающей сети достигаются благодаря стабилизации стабилизатором 24 опорного напряжения амплитуды питающего переменного напряжения и пиковому детектированию выходного напряжения (детектором 20 с прибором 21), Пиковый детектор 20 в простейшем случае, приведенном на чертеже, содержит выпрямитель 30 и накопительный конденсатор 31, заряжаемый до амплитудного значения напряжения. В процессе юстировки, градуировки и работы устройства его выходной прибор 21 показывает амплитуду напряжения на выходе 19. Переключающий узел 32 выполнен, например, в виде двух съемных перемычек и обеспечивает изменение полярности сигнала датчика 8 относительно входа схемы суммиров ания. Переключатели 15-18 в зависимости от их положения позволяет использо50 вать один и тот же пиковый детектор 20 с выходным измерительным прибором 21 для следующих операций: 1/ выбора в процессе наладки (при вертикальном положении рычагов 25) 55 косинусного режима работы поворотных трансформаторов 6-8 (за счет поворота их статоров с последующей их фиксацией) ; 1362217 2/ симметрирования датчиков 6-8 ннях рукава в плоскости измерения ("длина, рычагов одинакова) при вертиего размеров. кальном положении рычагов 25; Формула и з о б р е т е н и я 3/ выбора величины напряжения на выходе источника 5 опорного напряжеУстройство для измерения линейных ния» соответствующего нулевому покаразмеров объекта, содержащее п датчизанию прибора 21 при нулевом (гориков положения поверхности измеряемозонтальном) положении рычагов 25; А/ окончательной юстировки устрой- 10 го объекта и источник опорного напряжения, выполненные в виде поворотных ства (при вертикальном положении одного из рычагов 25 прибор 21 долтрансформаторов, источник питающего жен показать длину рычага); ; напряжения, схему суммирования, п ре5/ снятия градуировочной харак- v гулируемых резисторов по числу даттеристики устройства (проверки ее 15 чиков положения поверхности измеряелинейности); ' ,; • мого объекта, подключенный к выходу 6/ измерения размеров объекта в схемы суммирования регистратор, пернормальном режиме эксплуатации уствичные обмотки поворотных трансфорройства (в положении переключателей, маторов датчиков положения поверхпоказанном на чертеже). 20 ности измеряемого объекта подключены , последовательно между собой и паралЮстировка устройства выполняется лельно источнику питающегося нав два этапа: пряжения и первичной обмотке поворотI/ симметрирование; 2/ окончательного трансформатора, источник опорноная юстировка, 25 го напряжения, вторичные обмотки по. Регулируемыми резисторами 3 и 4 воротных трансформаторов датчиков пообеспечивается симметрирование датчиложения поверхности измеряемого объекков 6-8 по чувствительности к отклота и вторичная обмотка источника опорнонениям рычагов 25 (длина рычагов го напряжения подключены к соответствуодинакова). При этом изменение величины одного из стимулирующих резисто- 30 ющим входам схемы суммирования, о т ров (например, 4) не нарушает симметл и ч а ю щ е е с я тем, что, с рии остальных датчиков (6 и 7 ) . Это целью повышения точности, оно снабпозволяет повысить точность юстировжено (п+1)-ым регулируемым резистором» ки. Симметрирование начинается с датвключенным между одной из клемм исчиков 6 и 7, имеющих общий резистор точника питающего напряжения и ре" 35 3, а затем симметрируются остальные гулируемым резистором п-го датчика датчики • по отношению к отсимметриположения поверхности измеряемого рованным. Резистором 2 осуществляетобъекта, схема суммирования снабже- *. . . ся окончательная юстировка. на (n+J) переключателем по.числу вхо— 40 дов, неподвижные контакты каждого из Переключающий узел 32 позволяет переключателей являются выходами втоупростить и повысить точность операричных обмоток поворотных трансформации симметрирования датчиков. При торов соответствующих датчиков поэтом симметрирование датчиков осуложения поверхности измеряемого объ— /• ществляется по отношению к датчику екта и источника опорного напряжения, 8 (с переключенной полярностью вы4 5 подвижный контакт каждого из перекходного сигнала) за счет достижелючателей, начиная со второго,подклюния нулевой разницы сигнала этого чен к второму неподвижному контакту датчика и каждого из датчиков 6 и 7. соответствующего предыдущего переклюВ процессе производства пленки РУ~ 50 ч а т е л я » подвижный контакт первого переключателя и второй неподвижный конкавным способом раздуваемый пленочный такт (п+1)-го переключателя подключерукав может смещаться в плоскости изны к соответствующим входам регистрамерения его диаметра. Включение юститора, а каждый из п регулируемых реровочных резисторов 3 и 4 параллельзисторов включен параллельно первично первичным обмоткам датчиков 8 позной обмотке поворотного трансформаволяет практически исключить взаимтора соответствующего датчика положеное влияние датчиков друг на друга. ния поверхности контролируемого объВ конечном счете это повышает точекта. ночть измерения, особенно при смеще 1362217 S 9 " ^ ^ •"^^» ^Ь»^ «^и"» /J r-rtu I _^ 1 j__ * Редактор М.Кузнецова Заказ 1588/ДСП — ^ J g о Составитель А.Куликов Техред М.Дидык Корректор В. Бутяга Тираж 642 Подписное В И П Государственного комитета СССР НИИ по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д.4/5 Производственно-полиграфическое предприятие,г.Ужгород,^л.Проектная,4
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for measurement of linear dimensions of object
Автори англійськоюZnachkovskyi Borys Mykolaiovych, Osetskyi Yurii Mykhailovych, Hotsaliuk Yurii Borysovych
Назва патенту російськоюУстройство для измерения линейных размеров объекта
Автори російськоюЗначковский Борис Николаевич, Осецкий Юрий Михайлович, Гоцалюк Юрий Борисович
МПК / Мітки
МПК: G01B 7/02
Мітки: вимірювання, об'єкту, пристрій, лінійних, розмірів
Код посилання
<a href="https://ua.patents.su/4-5162-pristrijj-dlya-vimiryuvannya-linijjnikh-rozmiriv-obehktu.html" target="_blank" rel="follow" title="База патентів України">Пристрій для вимірювання лінійних розмірів об’єкту</a>
Пристрій для вимірювання струму
Номер патенту: 4162
Опубліковано: 27.12.1994
Автори: Бондарь Віталій Григорович, Андрющенко Володимир Віталійович
МПК: H01F 38/28
Мітки: пристрій, струму, вимірювання
Формула / Реферат:
1. Устройство для измерения тока, содержащее комплект однотипных встроенных трансформаторов тока, состоящих из тороидальных магнитопроводов с вторичными обмотками, комплект прижат к опорной поверхности стяжными шпильками с помощью прижимных элементов, отличающееся тем, что каждый прижимной элемент состоит из двух металлических рычагов - верхнего и нижнего, нижний рычаг представляет собой плоскую пластину с загнутыми краями, а верхний имеет...
Пристрій для вимірювання струму
Номер патенту: 3910
Опубліковано: 27.12.1994
Автори: Непорожній Олександр Володимирович, Бондарь Віталій Григорович, Журба Надія Василівна
МПК: H01F 38/28
Мітки: пристрій, струму, вимірювання
Формула / Реферат:
1. Устройство для измерения тока, содержащее комплект однотипных трансформаторов тока, каждый из которых состоит из тороидального магнитопровода и вторичной обмотки, разделенной на секции с образованием углублений между ними, в углублениях одного трансформатора установлены опорные клинья, образующие выступы, отличающееся тем, что оно снабжено закладками, закрепленными на крайних витках соседних секций другого трансформатора и фиксирующих...
Пристрій для калібровки вимірювача лінійних переміщень
Номер патенту: 2657
Опубліковано: 26.12.1994
Автори: Цибулько Вадим Йосипович, Фурман Данило Михайлович, Ткаченко Леонід Іванович, Метельов Леонід Дмитрович, Хазанович Володимир Давидович
МПК: G01B 7/14, G01N 27/00
Мітки: лінійних, переміщень, калібровки, вимірювача, пристрій
Формула / Реферат:
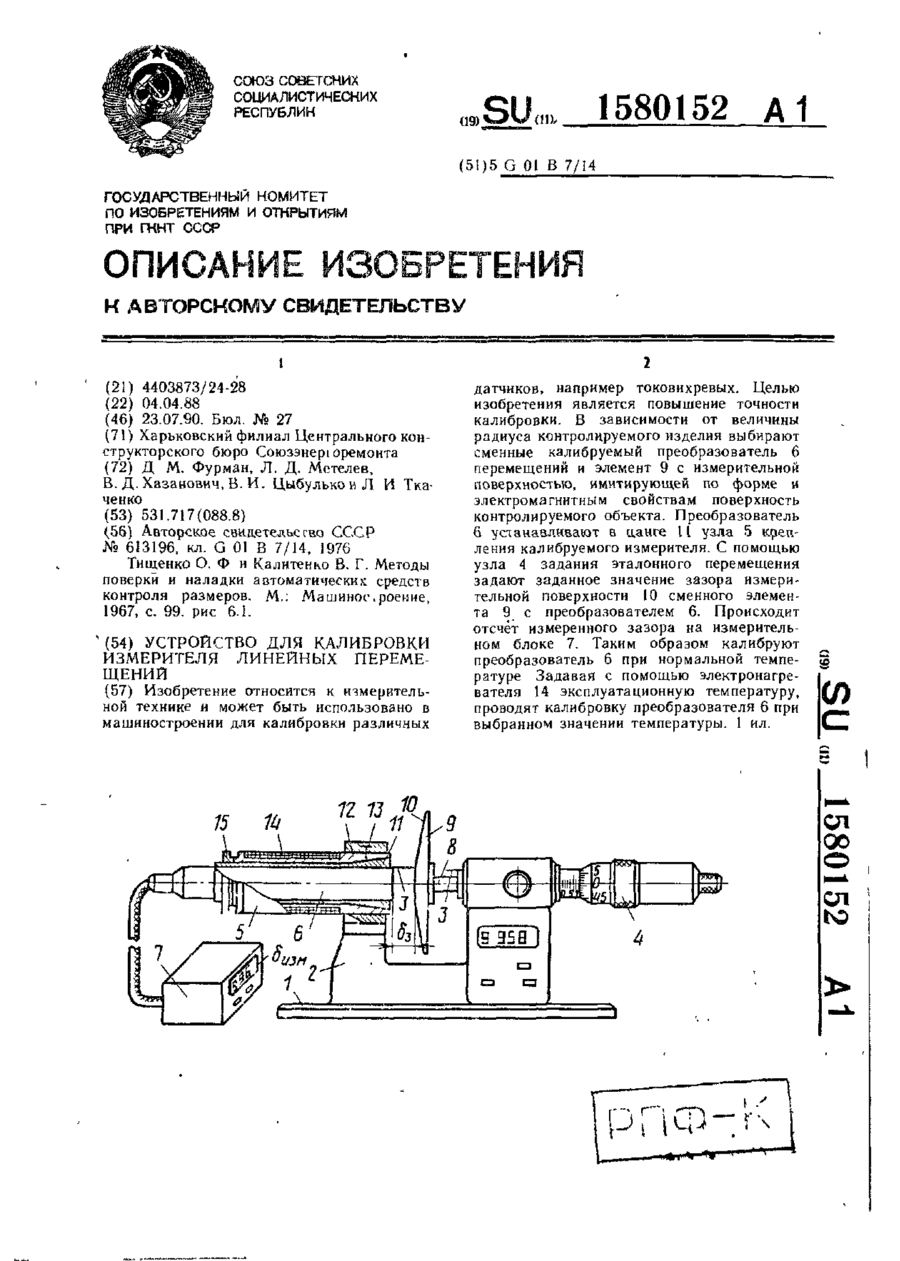
Устройство для калибровки измерителя линейных перемещений, содержащее установленную на оснований скобу с двумя соосными отверстиями, в одном из которых установлен узел задания эталонного перемещения с подвижным стержнем, в другом — узел крепления калибруемого измерителя, отличающееся тем, что, с целью повышения точности калибровки, оно снабжено электронагревателем, узел крепления калибруемого измерителя выполнен в виде сменного цангового...
Пристрій для вимірювання діелектричних властивостей плодоовочевої продукції
Номер патенту: 1347
Опубліковано: 25.03.1994
Автори: Мельничук Петро Дмитрович, Романовський Іван Якимович, Лукашенко Володимир Іванович
МПК: G01N 33/02, G01N 27/00
Мітки: властивостей, діелектричних, продукції, вимірювання, пристрій, плодоовочевої
Формула / Реферат:
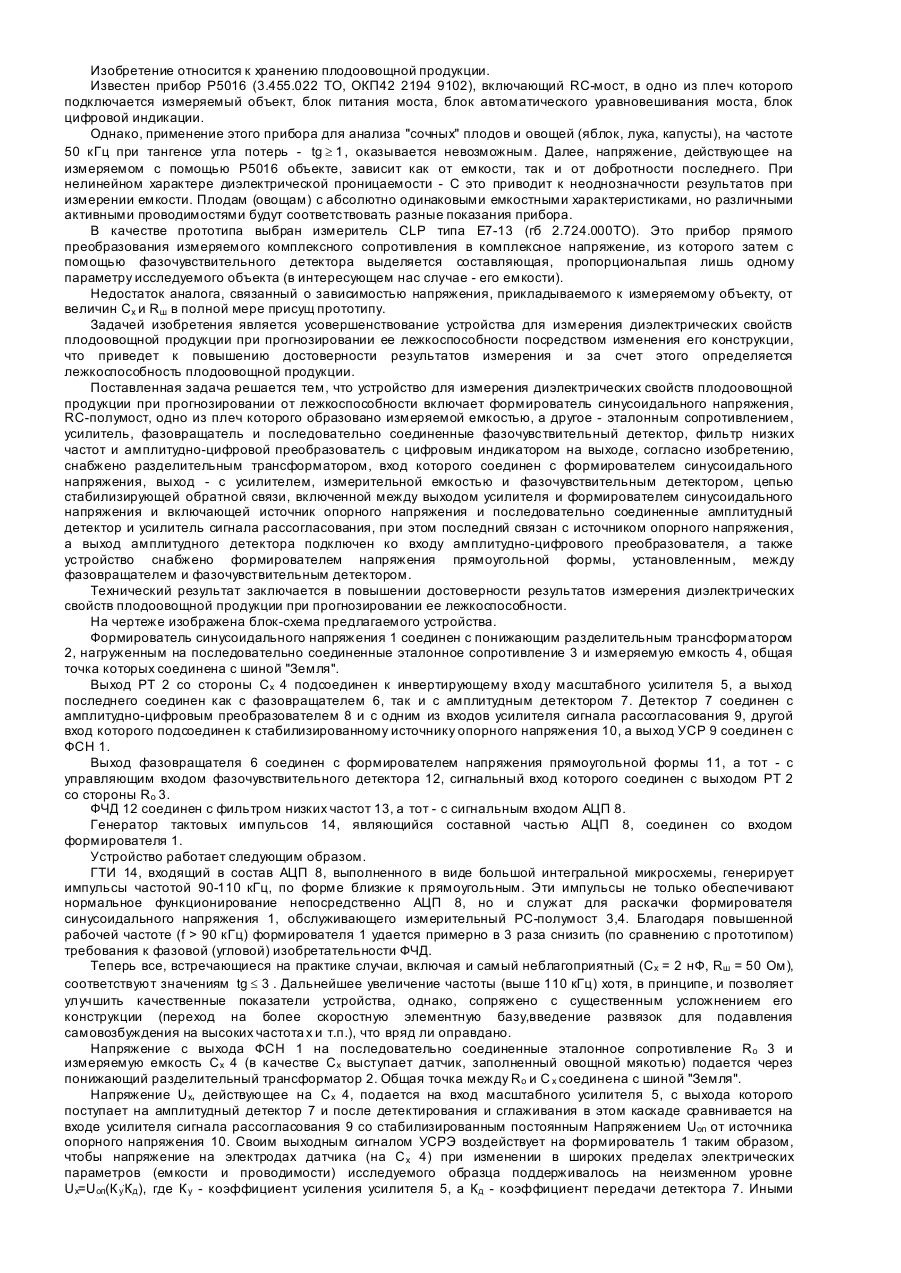
Устройство для измерения диэлектрических свойств плодоовощной продукции при прогнозировании ее лежкоспособности, включающее формирователь синусоидального напряжения, RC-полумост, одно из плеч которого Образовано измеряемой емкостью, а другое - эталонным сопротивлением, усилитель, фазовращатель ипоследовательно соединенные фазочувствительный детектор, фильтр низких частот и амплитудно-цифровой преобразователь с цифровым индикатором на выходе,...
Пристрій для вимірювання параметрів інерційних ланок
Номер патенту: 4063
Опубліковано: 27.12.1994
Автори: Загарій Генадій Іванович, Левочко Борис Степанович, Мамонов Анатолій Васильович, Гусєв Ігор Вікторович, Гусєв Павло Вікторович, Ситник Борис Тимофійович
МПК: G05B 23/02
Мітки: вимірювання, параметрів, пристрій, ланок, інерційних
Формула / Реферат:
Устройство для измерения параметров инерционных звеньев, содержащее блок вычисления параметров передаточной функции, первый и второй фильтры, выходы которых подключены соответственно к первому и второму входам блока вычисления параметров передаточной функции, выход которого является выходом устройства, а первые входы первого и второго фильтров подключены соответственно к выходу и входу исследуемого звена, вход которого является входом...
Попередній патент: Керамічний флюс для зварювання низьколегованих високоміцних сталей
Наступний патент: Спосіб одержання хлорофіліпту
Випадковий патент: Спосіб отримання n-амінокарбоніл-4-амінофенолів