Універсальний мікропроцесорний контролер
Номер патенту: 54042
Опубліковано: 25.10.2010
Автори: Ковриго Юрій Михайлович, Бунке Олександр Сергійович, Коновалов Михайло Андрійович, Голінко Ігор Михайлович
Формула / Реферат
Універсальний мікропроцесорний контролер, який містить послідовно з'єднані пристрої вводу-виводу інформації, аналого-цифровий перетворювач, перший перетворювач-суматор, фільтр, другий суматор, цифровий обчислювальний пристрій та вихідний елемент для формування основного закону керування виконавчим механізмом, який відрізняється тим, що функціональна структура універсального мікропроцесорного контролера містить трипозиційний нелінійний вихідний елемент, вихідні сигнали якого, одночасно з подачею на виконавчий механізм, подаються також в перший швидкодіючий контур зворотного зв'язку, функціональна структура якого реалізує функцію:
![]() (1)
(1)
де ![]() - коефіцієнт підсилення швидкодіючого зворотного зв'язку,
- коефіцієнт підсилення швидкодіючого зворотного зв'язку,
![]() - стала часу ізодрому,
- стала часу ізодрому,
а також подаються в другий контур інерційного зворотного зв'язку, що містить елемент запізнення, функціональна структура якого реалізує функцію:
![]() ,(2)
,(2)
де ![]() - коефіцієнт підсилення інерційного зворотного зв'язку,
- коефіцієнт підсилення інерційного зворотного зв'язку,
![]() - сталі часу ізодрому та упередження,
- сталі часу ізодрому та упередження,
![]() - основа натурального логарифму,
- основа натурального логарифму,
![]() - час запізнення;
- час запізнення;
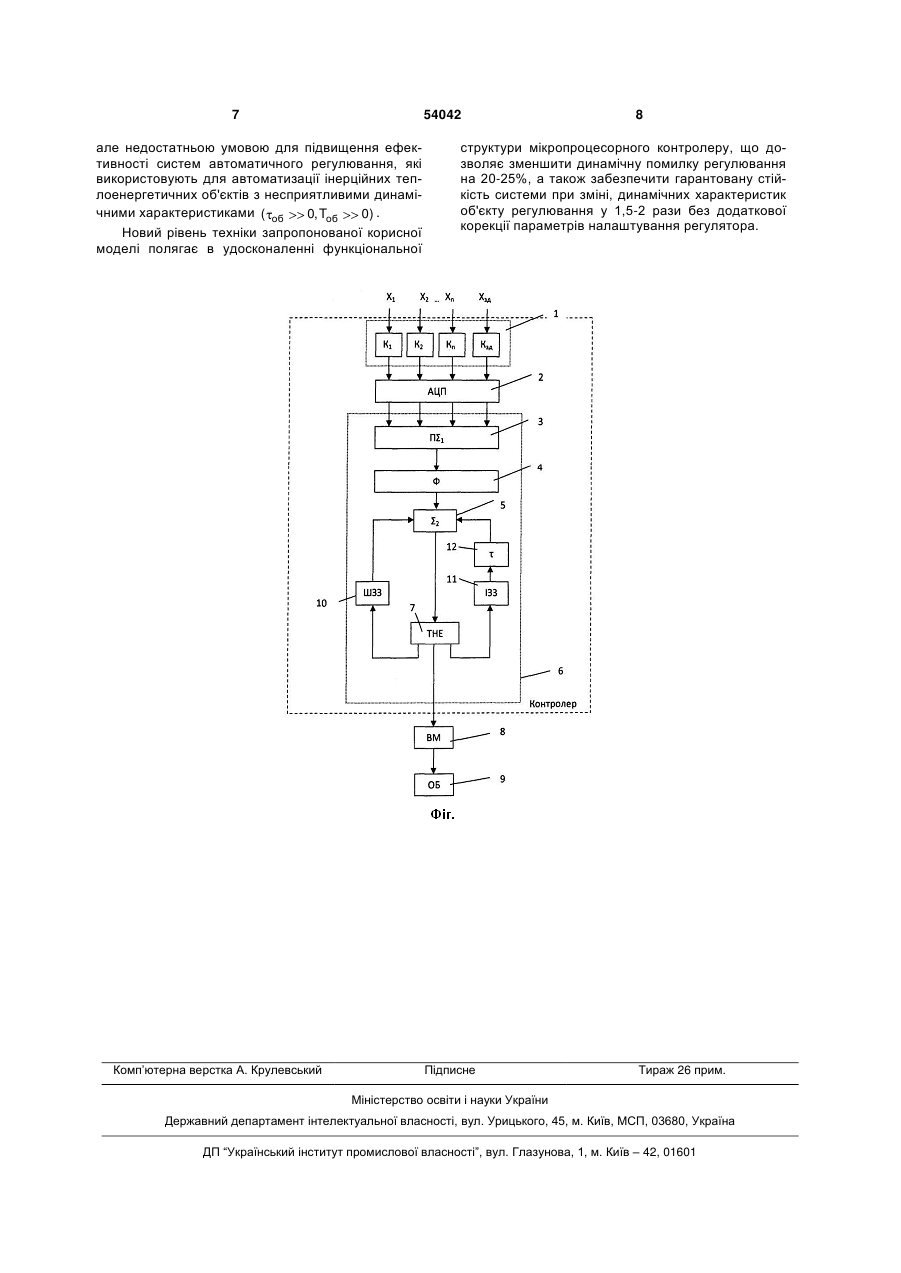
причому входи першого швидкодіючого та другого інерційного зворотних зв'язків підключені до двох додаткових виходів трипозиційного нелінійного елемента, а виходи їх відповідно підключені до першого входу другого суматора та входу блока запізнення, вихід якого підключено до другого входу другого суматора, а третій вихід трипозиційного нелінійного елемента подається на вхід виконавчого механізму.
Текст
Універсальний мікропроцесорний контролер, який містить послідовно з'єднані пристрої вводувиводу інформації, аналого-цифровий перетворювач, перший перетворювач-суматор, фільтр, другий суматор, цифровий обчислювальний пристрій та вихідний елемент для формування основного закону керування виконавчим механізмом, який відрізняється тим, що функціональна структура універсального мікропроцесорного контролера містить трипозиційний нелінійний вихідний елемент, вихідні сигнали якого, одночасно з подачею на виконавчий механізм, подаються також в перший швидкодіючий контур зворотного зв'язку, функціональна структура якого реалізує функцію: K1 WШЗЗ (P) , (1) T1p 1 де K1 - коефіцієнт підсилення швидкодіючого зворотного зв'язку, T1 - стала часу ізодрому, а також подаються в другий контур інерційного зворотного зв'язку, що містить елемент запізнення, функціональна структура якого реалізує функцію: K2 WІЗЗ (p) e p ,(2) (T2 P 1) (T3 p 1 Універсальний мікропроцесорний контролер (далі УМІКОНТ) відноситься до базових цифрових регуляторів дискретно-імпульсної структури, що використовуються в системах автоматичного регулювання технологічних процесів (АСУТП) в енергетичній, металургійній, хімічній, будівельній та інших галузях промисловості. Необхідність розробки регулюючого мікроконтролера обумовлена відсутністю на промисловому ринку технічних засобів автоматизації універсального базового цифрового регулятора, в рівній мірі ефективного для широкого класу інерційних об'єктів із запізненням. Відомі мікропроцесорні контролери, що використовуються для регулювання технологічних процесів в різних галузях промисловості, напри клад, регулятори системи «МИНИТЕРМ», що серійно виробляються Московським заводом теплової автоматики (ОАО «МЗТА»). Технічні дані про мікропроцесорні регулятори «МИНИТЕРМ» містяться у «Техописание и инструкции по эксплуатации регуляторов МИНИТЕРМ» (випуск ОАО «МЗТА», 2000р.). Ці регулятори і прийняті за найближчий аналог. Усі модифікації регуляторів «МИНИТЕРМ» відрізняються між собою тільки деякими апаратними особливостями і мають практично ідентичну функціональну структуру керування виконавчим механізмом. Регулятори «МИНИТЕРМ» містять послідовно з'єднані апаратний пристрій вводу-виводу інформації, аналогово-цифровий перетворювач, перет де R 2 - коефіцієнт підсилення інерційного зворотного зв'язку, T2 , T3 - сталі часу ізодрому та упередження, 2,718 - основа натурального логарифму, - час запізнення; причому входи першого швидкодіючого та другого інерційного зворотних зв'язків підключені до двох додаткових виходів трипозиційного нелінійного елемента, а виходи їх відповідно підключені до першого входу другого суматора та входу блока запізнення, вихід якого підключено до другого входу другого суматора, а третій вихід трипозиційного нелінійного елемента подається на вхід виконавчого механізму. (19) UA (11) 54042 (13) U e 3 ворювач-суматор вхідних сигналів, фільтр, цифровий обчислювальний пристрій, широтноімпульсний модулятор, засоби вводу і виводу інформації по інтерфейсному каналу. Регулятори «МИНИТЕРМ» мають одноканальну функціональну структуру керування виконавчим механізмом без внутрішніх зворотних зв'язків, якій властиве «технічне протиріччя» між швидкодією регулятора та стійкістю системи в перехідному процесі. Відомо, що у будь-яких систем регулювання існує декілька важливих показників, що характеризують ступінь їх досконалості: швидкодія регулятора та запас стійкості системи керування. Перевага надається тим системам, де між цими показниками не існує «технічного протиріччя», яке полягає у тому, що збільшення швидкодії регулятора одночасно зменшує його запас стійкості. До систем регулювання складних теплоенергетичних об'єктів ( об 0, Tоб 0) пред'являються досить суперечливі вимоги. Вони повинні мати досить високу швидкодію та, при цьому, одночасно забезпечувати малу коливальність перехідних процесів, тобто бути стійкими. Мікропроцесорні регулятори «МИНИТЕРМ», в яких використовують для формування законів керування тільки форсуючі ланки (ПД, ПДД) відповідають тільки першій умові - швидкодії. Умову забезпечення малої коливальності перехідного процесу, тобто стійкості системи більш складно забезпечити, так як одноканальна функціональна структура регулятора «МИНИТЕРМ» не містить технічних функціональних елементів, забезпечуючих стабілізуючий ефект перехідного процесу. Задовольнити обом вимогам, щоб одночасно забезпечити високу якість перехідних процесів при збереженні гарантованої стійкості системи в одноканальній функціональній структурі відомих мікроконтролерів практично неможливо. Технічне протиріччя, що властиве регуляторам «МИНИТЕРМ», знижує ефективність їх використання при автоматизації складних теплоенергетичних об'єктів ( об 0, Tоб 0) . Тому відомі регулятори мало придатні для якісного регулювання параметрів інерційних об'єктів з запізненням. В основу корисної моделі поставлена задача усунути вказані недоліки, вирішити проблему технічного протиріччя та удосконалити функціональну структуру відомих регуляторів. Поставлена задача вирішується тим, що в універсальному мікропроцесорному контролері, який містить послідовно з'єднані пристрої вводу-виводу інформації, аналого-цифровий перетворювач, перший перетворювач-суматор, фільтр, другий суматор, цифровий обчислювальний пристрій та вихідний елемент для формування основного закону керування виконавчим механізмом (ВМ), новим є те, що функціональна структура мікропроцесорного контролера містить трьохпозиційний нелінійний вихідний елемент (ТНЕ), вихідні сигнали якого, одночасно з подачею на виконавчий механізм, подаються також в перший швидкодіючий контур зворотного зв'язку (ШЗЗ), функціональна 54042 4 структура якого реалізує функцію: K1 , (1) Wшзз (p) T1p 1 де K1 - коефіцієнт підсилення швидкодіючого зворотного зв'язку, T1 - стала часу ізодрому, а також в другий контур інерційного зворотного зв'язку (IЗЗ), що містить елемент запізнення, функціональна структура якого реалізує функцію: K2 WІЗЗ (p) e p , (2) (T2 p 1) (T3 p 1 де K 2 - коефіцієнт підсилення інерційного зворотного зв'язку, T2 , T3 - сталі часу ізодрому та упередження, e 2,718 - основа натурального логарифму, - час запізнення; причому входи першого швидкодіючого та другого інерційного зворотних зв'язків підключені до двох додаткових виходів трьохпозиційного нелінійного елементу, а виходи їх відповідно підключені до першого входу другого суматора ( 2 ) та входу блока запізнення, вихід якого підключено до другого входу другого суматора, а третій вихід трьохпозиційного нелінійного елементу подається на вхід виконавчого механізму. На Фіг. представлена функціональна структурна схема оптимального по швидкодії та стійкості універсального мікропроцесорного контролера. УМІКОНТ містить апаратний пристрій вводу інформації 1 від аналогових вхідних сигналів. Вхідні сигнали X1, X2,...K n, Xзд перетворюються аналого-цифровим перетворювачем 2 у їх цифрові еквіваленти. Перетворювач-суматор ( 1) 3 вираховує суму вхідних сигналів з урахуванням їх масштабних коефіцієнтів K1, K 2,...Kn, K зд , після чого сигнал оброблюється фільтром (Ф) 4. Суматор ( 2 ) 5 вираховує загальну неузгодженість □, з урахуванням сигналів швидкодіючого (ШЗЗ) 10 та інерційного (ІЗЗ) 11, 12 зворотних зв'язків. Цифровий обчислювальний пристрій ЦОП 6 містить мікро-ЕОМ, оперативний та постійний запам'ятовуючий пристрої, бібліотеку функціональних блоків, а також елементи для передачі та обробки інформації по інтерфейсному каналу (на кресленні не показано). Заміна в УМІКОНТі широтно-імпульсного модулятора на трьохпозиційний нелінійний вихідний елемент (ТНЕ), що формує «петлеву» нелінійну статичну характеристику з зоною нечутливості до вхідного сигналу, підвищує запас стійкості системи регулювання на інерційних об'єктах із запізненням. Формування імпульсних сигналів на виході контролера виконується за допомогою цифрового обчислювального пристрою 6 та трьохпозиційного нелінійного елементу 7. Ці сигнали поступають на виконавчий механізм (ВМ) 8, що діє на об'єкт регулювання (ОБ) 9, та одночасно поступають в контури швидкодіючого 10 та інерційного 11, 12 зворот 5 них зв'язків. За допомогою апаратури оперативного керування можна регулювати параметри налаштування мікроконтролеру та контролювати сигнали у проміжних внутрішніх точках його структури. Універсальний мікропроцесорний контролер працює наступним чином. Вхідні сигнали X1, X2,...K n, Xзд , що поступають на пристрій вводу інформації 1 перетворюються аналого-цифровим перетворювачем 2 в їх цифрові еквіваленти. При відхиленні регульованого параметру X1, X2,...K n, від заданого значення X зд - на виході перетворювача-суматора 3 з'являється сигнал неузгодження є. Оброблений фільтром 4, сигнал неузгодження □ надходить у суматор 5 одночасно з сигналами швидкодіючого 10 та інерційного 11, 12 зворотних зв'язків, що потім оброблюються цифровим обчислювальним пристроєм 6, в якому формується основний закон керування виконавчим механізмом. При величині сигналу неузгодження , що перевищує порогове значення чутливості, контролер починає вираховувати керуючий сигнал. Першим вступає в роботу швидкодіючий гнучкий зворотний зв'язок 10, що формує сигнал керування у відповідності до ГПД-закону регулювання згідно формули (1). Вихідний сигнал, через дискретні виходи контролера, надходить на виконавчий механізм 8, що переміщує регулюючий орган на величину, достатню для компенсації відхилення регулюємого параметра. Сигнал від інерційного зворотного зв'язку 11 надходить не одразу, а по проходженню часу затримки, що формується ланкою запізнення 12, яка входить до складу функціональної структури контролера. Вихідний сигнал інерційного зворотного зв'язку призначений для «гальмування» та обмеження дії на регулюючий орган на заключному етапі перехідного процесу, після того, як вже виконано регулюючий вплив, достатній для компенсації величини відхилення параметру, що регулюється. Це допомагає уникнути перерегулювання на інерційних об'єктах з запізненням, та одночасно збільшити запас стійкості системи регулювання. Розмежування у часі взаємодії зворотних зв'язків, що формують основний закон керування виконавчим механізмом, та розподілені параметри налаштування кожного зворотного звязку дозволяють забезпечити оптимальну швидкодію контролера в початковій фазі перехідного процесу і, таким чином, отримати мінімальне відхилення параметру, що регулюється, від заданого значення, а також забезпечити гарантовану стійкість системи на заключному етапі перехідного процесу, своєчасно обмеживши переміщення регулюючого органу. В приведеному описі функціональна структура УМІКОНТа по складу основних апаратних пристроїв мало відрізняється від багатьох відомих мікропроцесорних контролерів, у тому числі й прийнятих за найближчий аналог регуляторів «МИНИТЕРМ» (ОАО «МЗТА»). Відмінність полягає у формуванні 54042 6 функціональної структури контролера та способу реалізації основного закону керування виконавчим механізмом за допомогою двох незалежних зворотних зв'язків (ШЗЗ, ІЗЗ) а також заміні широтноімпульсного модулятора та трьохпозиційний нелінійний вихідний елемент. Удосконалення контролера з метою забезпечити його оптимальну швидкодію при збереженні гарантованої стійкості системи, є можливим тільки шляхом зміни його функціональної структури, що дає можливість сформувати нові, більш якісні режими керування виконавчим механізмом. На відміну від відомих контролерів, для підвищення ефективності та усунення вказаних недоліків, пропонується удосконалити одно канальну функціональну структуру контролера шляхом використання двох самостійних функціональних зворотних зв'язків ШЗЗ та IЗЗ, які забезпечують формування значно ефективнішого закону керування виконавчим механізмом, отриманого в результаті технічної реалізації системи рівнянь (1) та (2). Швидкодія контролера забезпечується параметрами налаштування першого швидкодіючого здорового зв’язку (K1, T1) . Запас стійкості системи забезпечується параметрами налаштування другого інерційного зворотного зв'язку та елементу транспортного запізнення ( K 2, T2, T3 , ) . За допомогою двох незалежних зворотних зв'язків ШЗЗ та ІЗЗ, в кожному з яких наявні свої індивідуальні параметри налаштування, з'явилася можливість усунути недоліки відомих одноканальних контролерів, шляхом структурного розмежування у часі задач швидкодії та стійкості. Технічна реалізація функціональної структури УМІКОНТа дозволить вирішити проблему технічного «протиріччя» між швидкодією та стійкістю системи регулювання, на відміну від одноканальної структури відомих контролерів, де налаштування системи є компромісом між швидкодією та стійкістю. Компроміс - це лише незначне покращення одного з показників перехідного процесу за рахунок погіршення іншого показника, що не є прийнятним для об'єктів з високими вимогами до якості перехідного процесу. Така функціональна структура УМІКОНТа дозволяє сформувати у визначеній послідовності свої складові керуючого впливу на виконавчий механізм, що дає можливість забезпечити їх універсальну ефективність для широкого спектру інерційних теплоенергетичних об'єктів. Таким чином, суть корисної моделі полягає в тому, що у запропонованому мікропроцесорному контролері реалізується принципово новий режим керування виконавчим механізмом шляхом заміни недостатньо ефективної одноканальної структури керування, що використовується у відомих контролерах, на більш ефективну структуру з використанням двох відносно незалежних зворотних зв'язків ШЗЗ та ІЗЗ, яка відповідає основним класичним принципам побудови регуляторів. Удосконалення лише конструкції мікроконтролера (нова форма), без одночасного удосконалення його функціональної структури керування (нова суть), є значною, 7 54042 але недостатньою умовою для підвищення ефективності систем автоматичного регулювання, які використовують для автоматизації інерційних теплоенергетичних об'єктів з несприятливими динамічними характеристиками ( об 0, Tоб 0) . Новий рівень техніки запропонованої корисної моделі полягає в удосконаленні функціональної Комп’ютерна верстка А. Крулевський 8 структури мікропроцесорного контролеру, що дозволяє зменшити динамічну помилку регулювання на 20-25%, а також забезпечити гарантовану стійкість системи при зміні, динамічних характеристик об'єкту регулювання у 1,5-2 рази без додаткової корекції параметрів налаштування регулятора. Підписне Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюAll-purspose microproccesor controller
Автори англійськоюKovryho Yurii Mykhailovych, Konovalov Ihor Mykhailovych, Holinko Ihor Mykhailovych, Bunke Oleksandr Serhiiovych
Назва патенту російськоюУниверсальный микропроцессорный контроллер
Автори російськоюКовриго Юрий Михайлович, Коновалов Михаил Андреевич, Голинко Игорь Михайлович, Бунке Александр Сергеевич
МПК / Мітки
МПК: G05B 11/00
Мітки: універсальний, контролер, мікропроцесорний
Код посилання
<a href="https://ua.patents.su/4-54042-universalnijj-mikroprocesornijj-kontroler.html" target="_blank" rel="follow" title="База патентів України">Універсальний мікропроцесорний контролер</a>
Регулюючий мікропроцесорний контролер
Номер патенту: 44799
Опубліковано: 12.10.2009
Автори: Бунке Олександр Сергійович, Голінко Ігор Михайлович, Ковриго Юрій Михайлович, Коновалов Михайло Андрійович
МПК: G05B 11/00
Мітки: мікропроцесорний, контролер, регулюючий
Формула / Реферат:
Регулюючий мікропроцесорний контролер, що містить послідовно з'єднані пристрої вводу-виводу інформації, аналого-цифровий перетворювач, суматор, фільтр, цифровий обчислювальний пристрій для формування функціональної структури керування виконавчим механізмом і широтно-імпульсний модулятор, який відрізняється тим, що цифровий обчислювальний пристрій містить перший швидкодіючий канал керування; функціональна структура (ФС1) якого реалізує...
Мікропроцесорний контролер з паралельною обробкою інформації

Номер патенту: 47570
Опубліковано: 10.02.2010
Автори: Щербакова Ілона Олександрівна, Возненко Анатолій Дмитрович, Опанасенко Володимир Миколайович, Гончарова Лідія Леонідівна, Подлєсних Євгеній Геннадійович, Стасюк Олександр Іонович, Желєзняк Анатолій Леонідович
МПК: G06F 9/00
Мітки: паралельною, обробкою, інформації, контролер, мікропроцесорний
Формула / Реферат:
Мікропроцесорний контролер з паралельною обробкою інформації, що містить блок пам'яті і регістр, який відрізняється тим, що в нього введено мікропроцесор, чотири дешифратори, чотирипортовий модуль, два регістри, шифратори дискретних сигналів, аналого-цифровий перетворювач, формувач аналогових сигналів, ключі, паралельний матричний процесор, формувачі управляючих сигналів, причому вихід шини адреси першого порту мікропроцесора підключений до...
Контролер аналого-цифрової системи

Номер патенту: 34886
Опубліковано: 26.08.2008
Автор: Крупінов Юрій Олександрович
МПК: G01S 7/280
Мітки: аналого-цифрової, контролер, системі
Формула / Реферат:
Контролер аналого-цифрової системи, що містить аналого-цифровий перетворювач, на перший вхід якого надходить аналоговий сигнал, а другий вхід з'єднаний із першим виходом блока керування, на вхід якого надходить імпульс початкової установки, а четвертий вихід з'єднаний із другим входом блока обчислювання, який відрізняється тим, що в нього додатково введені перший та другий комутатори, генератор тестової послідовності, регістр зсуву зі...
Контролер ацп цифрового формувача квадратурних складових
Номер патенту: 34833
Опубліковано: 26.08.2008
Автор: Крупінов Юрій Олександрович
МПК: G01S 7/28
Мітки: квадратурних, ацп, формувача, складових, цифрового, контролер
Формула / Реферат:
Контролер АЦП цифрового формувача квадратурних складових, що містить АЦП, вихід якого з'єднаний з першим входом помножувача, вихід якого з'єднаний з першим входом суматора, вихід якого з'єднаний відповідно з першими входами лінії затримки, першого і другого регістрів; імпульс початкового установлення надходить на вхід блока керування, другий, третій, четвертий, п'ятий і шостий виходи якого з'єднані відповідно з другими входами АЦП,...
Мережний програмований контролер
Номер патенту: 79363
Опубліковано: 11.06.2007
Автори: Радченко Станіслав Станіславович, Фурман Ілля Олександрович
МПК: G05B 19/04, G05B 19/18, G05B 19/05
Мітки: мережний, програмований, контролер
Формула / Реферат:
Мережний програмований контролер, який містить схему порівняння, блоки пам'яті станів та команд, вузол логічного керування, лічильник адреси та блок пам'яті переходів, перший вхід якого з'єднаний з першим входом контролера, який підключений також до першого входу схеми порівняння, до другого входу якої підключений перший вихід блока пам'яті станів, перший вхід якого з'єднаний з першим входом блока пам'яті команд та з виходом лічильника...
Попередній патент: Спосіб оцінки ризику запальних захворювань пародонта
Наступний патент: Спосіб іммобілізації розбірних частин багатокомпонентних зубних імплантів з гвинтовою системою з’єднання
Випадковий патент: Ендопротез грудної залози