Багатопозиційний дозатор сипучих кормів з пристроєм зберігання та вивантаження дози концкорму для утримання тварин
Номер патенту: 63904
Опубліковано: 25.10.2011
Автори: Ніколаєва Людмила Анатоліївна, Осадчий Сергій Іванович, Шалімов Віктор Олександрович, Волков Ігор Васильович, Віхрова Лариса Григорівна


Формула / Реферат
Багатопозиційний дозатор сипучих кормів, що містить бункер, всередині якого вертикально розміщений привідний вал, з жорстко закріпленими перегрібачами, електродвигун, розміщений у верхній частині привідного вала і з'єднаний з муфтою, бункер обладнано електричними датчиками верхнього та нижнього рівнів корму, системою розпізнання тварин, пультом керування та датчиком витрат, що своїми виходами електрично зв'язані з входами блока управління, який при цьому своїми виходами зв'язаний з обмотками електродвигуна, транспортною системою та електромагнітом, який виконано з можливістю взаємодії з заслінкою, яку встановлено у випускній горловині бункера, а датчик витрат являє собою чутливий елемент, виконаний у вигляді жорстко закріпленої балки з прикріпленим до неї спускним жолобом та тензодатчиками, датчик витрат змонтовано на поворотному пристрої, який являє собою поворотну платформу, яка керується кроковим двигуном, входи якого надходять до блока керування, а відповідно до кількості позицій до складу систем розпізнавання входять додаткові датчики, та їх відповідні виходи поєднані зі входами блока керування, який відрізняється тим, що додатково містить пристрої для зберігання, вивантаження дози концкорму та утримання тварин, які містять цифровий датчик, редуктор двигуна, двигун та запірний елемент.
Текст
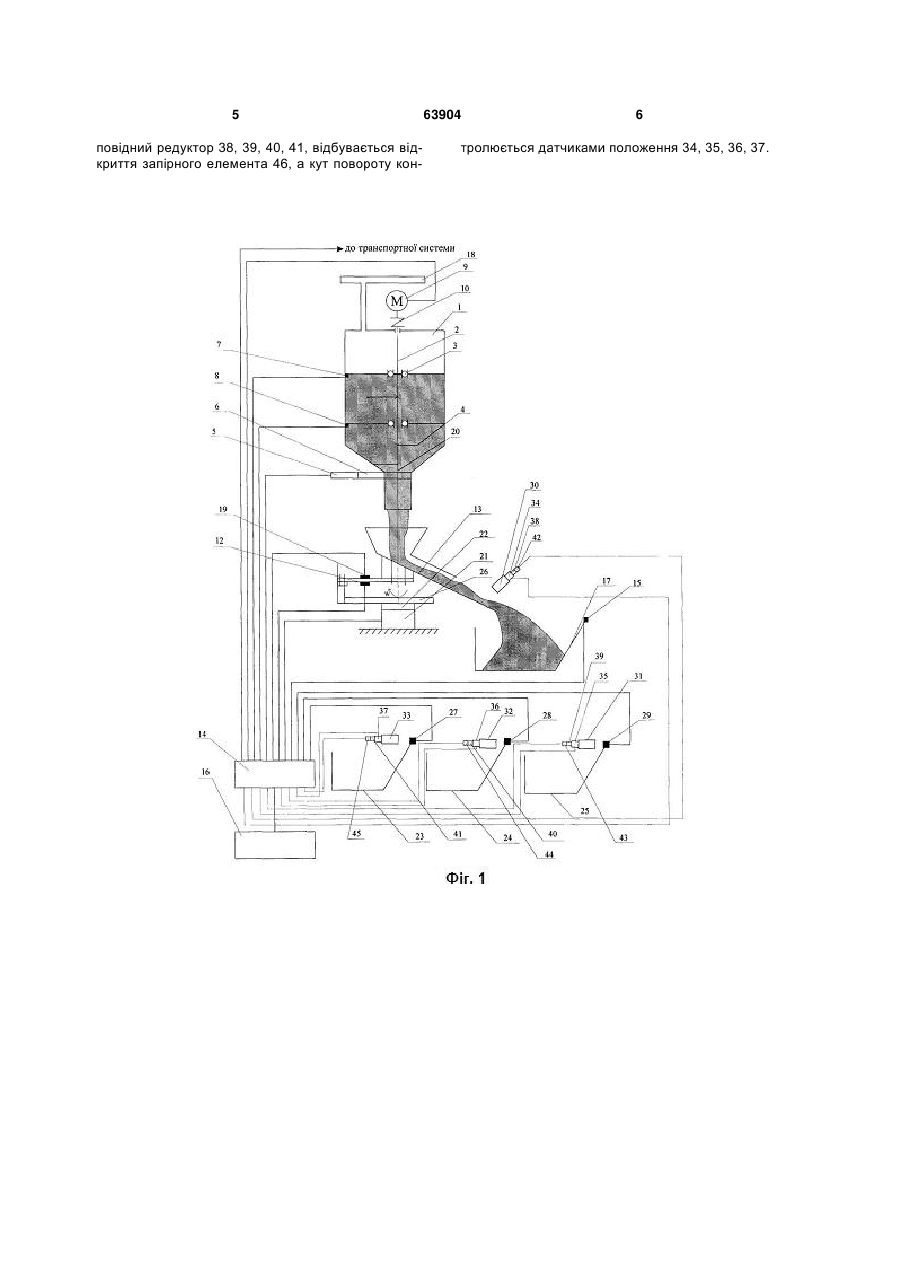
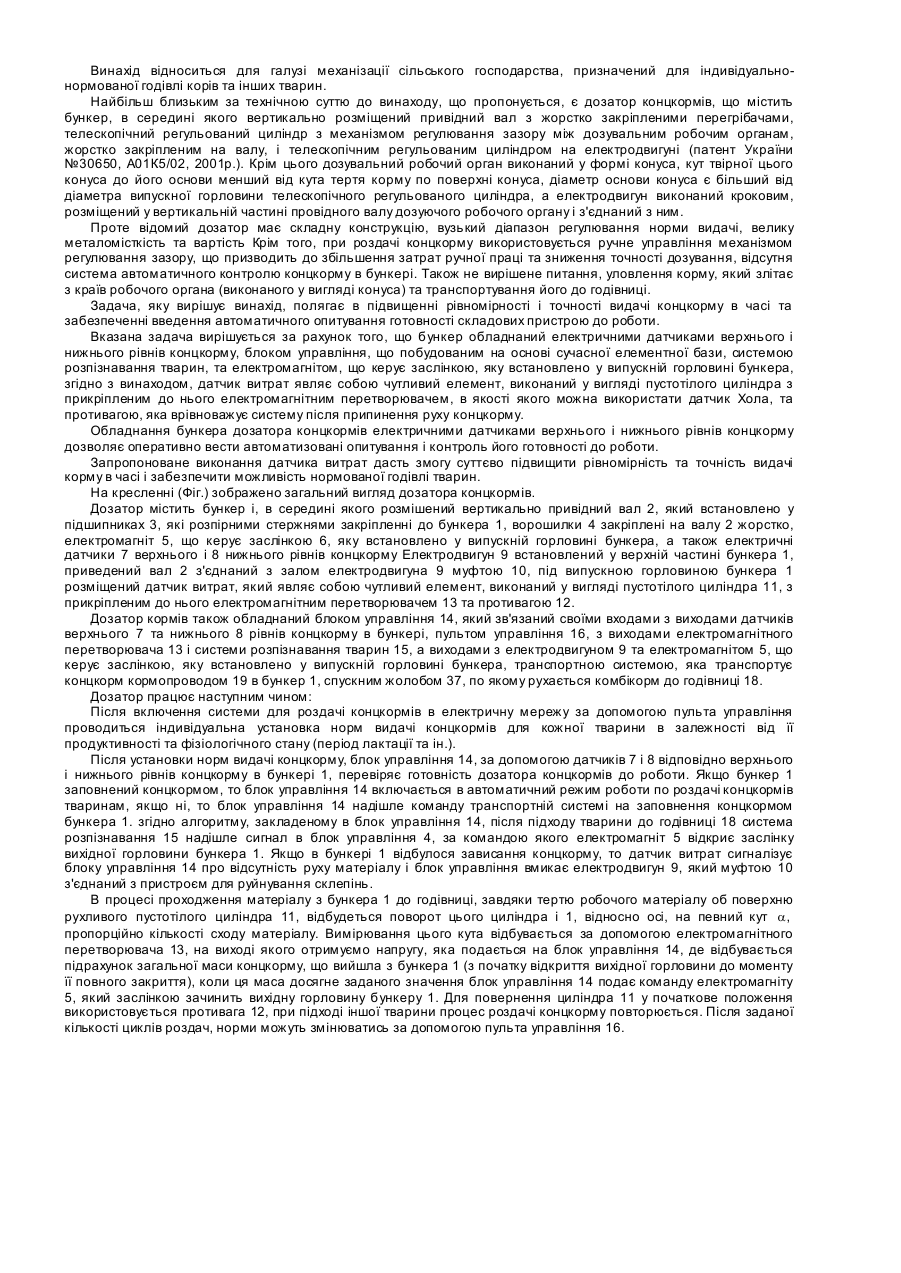
Багатопозиційний дозатор сипучих кормів, що містить бункер, всередині якого вертикально розміщений привідний вал, з жорстко закріпленими перегрібачами, електродвигун, розміщений у верхній частині привідного вала і з'єднаний з муфтою, бункер обладнано електричними датчиками верхнього та нижнього рівнів корму, системою розпізнання тварин, пультом керування та датчиком витрат, що своїми виходами електрично зв'язані з входами блока управління, який при цьому своїми 3 бази, системою розпізнавання тварин та електромагнітом, що керує заслінкою, яку встановлено у випускній горловині бункера, згідно з винаходом, датчик витрат являє собою чутливий елемент, виконаний у вигляді жорстко закріпленої балки з закріпленим до неї спускним жолобом та тензодатчиками. Обладнання бункера дозатора концкормів електричними датчиками верхнього і нижнього концкорму дозволяє оперативно вести автоматизовані опитування і контроль його готовності до роботи. Запропоноване виконання датчика витрат дасть змогу суттєво підвищити рівномірність та точність видачі корму в часі і забезпечити можливість нормованої годівлі декілька тварин. На кресленні зображено загальний вид фіг.1, вид зверху фіг.2 багатопозиційного дозатора концкормів, фіг.3 пристрій зберігання та вивантаження дози норму концкорму для утримання тварин. Дозатор містить бункер 1, всередині якого розміщений вертикально привідний вал 2, який встановлений у підшипниках 3, які розривними стержнями закріплені до бункера 1, перегрібача 4, закріплені на валу 2 жорстко електромагніт 5, що керує заслінкою 6, яку встановлено у випускній горловині бункера, а також електричні датчики 7 верхнього і 8 нижнього рівнів концкорму. Електродвигун 9 встановлений у верхній частині бункера 1, привідний вал 2 з'єднаний з валом електродвигуна 9 муфтою 10, під випускною горловиною бункера 1 розміщений датчик витрат який являє собою чутливий елемент, виконаний у вигляді жорстко закріпленої балки 11, з прикріпленим до неї спускним жолобом 13 та приклеєним зверху тензодатчиком 19 і знизу тензодатчиком 12. Дозатор кормів також обладнаний блоком керування 14, який зв'язаний своїми виходами з виходами датчиків верхнього 7 та нижнього 8 рівнів концкорму в бункері, пультом керування 16, з виходами тензодатчиків 12, 19 і системи розпізнавання тварин 15, а також 27, 28, 29. А виходи з електродвигуном 9 та електромагнітом 5, що керує заслінкою, яку встановлено у випускній горловині бункера, транспортною системою, яка транспортує концкорм кормопроводом 18 в бункер 1, спускним жолобом 13, по якому концкорм рухається до годівниці 17. Оскільки дозатор сипучих кормів багатопозиційний, бункер 1 також містить поворотну платформу 26, яка обертається згідно з віссю обертання 20 на кут , та віддозовує певну кількість концкорму до годівниць 23, 24, 25. А також він містить редуктор крокового двигуна 22 та кроковий двигун 21. Багатопозиційний дозатор сипучих кормів містить пристрій для зберігання та вивантаження дози норму концкорму для утримання тварин. Цей пристрій містить: ємності 30, 31, 32, 33; датчики положення 34, 35, 36, 37; редуктор двигуна 38, 39, 40, 41; двигун 42, 43, 44, 45; запірний елемент 46. Багатопозиційний дозатор сипучих кормів працює наступним чином: Після включення системи для роздачі концкормів в електричну мережу за допомогою пульта керування проводиться індивідуальна установка норм видачі концкормів для 63904 4 кожної тварини в залежності від її продуктивності та фізіологічного стану (періоду лактації та ін.). Після установки норм видачі концкорму, блок керування 14, за допомогою датчиків 7 і 8 відповідно верхнього і нижнього рівнів концкорму в бункері 1, перевіряє готовність дозатора концкормів до роботи. Якщо бункер 1 заповнений концкормом, то блок керування 14 включається в автоматичний режим роботи по роздачі концкормів тваринам, якщо ні, то блок керування 14 надішле команду транспортній системі на заповнення концкорму бункера 1. Згідно з алгоритмом, закладеному в блок керування 14, після підходу тварин до годівниці 17 система розпізнавання 15 надішле сигнал в блок управляння 14, за командою якого електромагніт 5 відкриває заслінку вихідної горловини бункера 1. Якщо в бункері 1 відбулося зависання концкорму, то датчик витрат сигналізує блоку керування 14 про відсутність руху матеріалу і блок керування вмикає електродвигун 9, який муфтою 10 з'єднаний з пристроєм для руйнування склепінь. В процесі проходження матеріалу з бункера 1 до годівниці 17, матеріал здійснює тиск з деякою силою на спускний жолоб 13, прикріплений до жорстко закріпленої балки 11, на якій заклеєно зверху і знизу тензодатчики 12, 19. Під дією сили тиску матеріалу на спускний жолоб 13 відбувається деформація балки 11. Тож, як балка 11 одночасно симетрично розтягується і стискується, то ці деформації відповідно вимірюють прикріплені зверху і знизу тензодатчики 12, 19, що дозволяє підвищити чутливість датчика витрат у два рази. Блок керування 14, враховуючи зміну напруг на тензодатчиках 12 і 19, здійснює згідно з заданим алгоритмом підрахунок загальної маси концкорму, що вийшов з бункера 1, коли ця маса досягне заданого значення блок керування 14 подає команду електромагніту 5, який заслінкою зачинить вихідну горловину бункера 1. При підході іншої тварини процес роздачі концкорму повторюється, а також за допомогою поворотної платформи 26 та системи розпізнання 27, 28, 29 процес роздачі корму здійснюється і в годівниці 23, 24, 25. Після заданої кількості циклів роздач, норми можуть змінюватися за допомогою пульта керування 16. З метою утримання тварин в разі їх одночасного підходу до годівниць 17, 23, 24, 25 багатопозиційної системи, додатково встановлено пристрої для зберігання та вивантаження раніше з дозованої дози концкорму, встановленої зоотехніками. Пристрої розміщені таким чином, щоб дозатор після видавання порції в годівницю, міг знову завантажити ємності 30, 31, 32, 33. Пристрої розташовані між спускним жолобом дозатора 13 та годівницями 17, 23, 24, 25 і мають ємності 30, 31, 32, 33 в які завантажується вище згадана доза концкорму (що складає частину порцій для тварин). Датчики положення 34, 35, 36, 37 інформують систему керування 14, про готовність ємностей до завантаження концкорму. Блок системи керування 14 за фактом спрацювання датчиків (системою) розпізнавання тварин 15, 27, 28, 29 і наявності призначеної порції концкорму вмикає відповідний двигун з встановлених 42, 43, 44, 45, які через від 5 повідний редуктор 38, 39, 40, 41, відбувається відкриття запірного елемента 46, а кут повороту кон 63904 6 тролюється датчиками положення 34, 35, 36, 37. 7 Комп’ютерна верстка Л. Ціхановська 63904 8 Підписне Тираж 23 прим. Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMultipositional doser of loose feeds with a device for storing and unloading rate of concentrated fodder for keeping animals
Автори англійськоюShalimov Viktor Oleksandrovych, Vikhrova Larysa Hryhorivna, Osadchyi Serhii Ivanovych, Volkov Ihor Vasiliovych, Nikolaieva Liudmyla Anatoliivna
Назва патенту російськоюМногопозиционный дозатор сыпучих кормов с устройством хранения и разгрузки дозы концкорма для содержания животных
Автори російськоюШалимов Виктор Александрович, Вихрова Лариса Григорьевна, Осадчий Сергей Иванович, Волков Игорь Васильевич, Николаева Людмила Анатольевна
МПК / Мітки
МПК: A01K 5/02
Мітки: сипучих, утримання, кормів, тварин, багатопозиційний, зберігання, дозатор, концкорму, пристроєм, вивантаження, дози
Код посилання
<a href="https://ua.patents.su/4-63904-bagatopozicijjnijj-dozator-sipuchikh-kormiv-z-pristroehm-zberigannya-ta-vivantazhennya-dozi-konckormu-dlya-utrimannya-tvarin.html" target="_blank" rel="follow" title="База патентів України">Багатопозиційний дозатор сипучих кормів з пристроєм зберігання та вивантаження дози концкорму для утримання тварин</a>
Багатопозиційний дозатор сипучих кормів
Номер патенту: 63425
Опубліковано: 10.10.2011
Автори: Гуцул Василь Іванович, Осадчий Сергій Іванович, Шалімов Віктор Олександрович, Віхрова Лариса Григорівна, Ніколаєва Людмила Анатоліївна
МПК: A01K 5/02
Мітки: багатопозиційний, сипучих, кормів, дозатор
Формула / Реферат:
Багатопозиційний дозатор сипучих кормів, що містить бункер, в середині якого вертикально розміщений привідний вал з жорстко закріпленими перегрібачами, електродвигун, розміщений у верхній частині привідного вала і з'єднаний з муфтою, бункер обладнано електричними датчиками верхнього та нижнього рівнів корму, системою розпізнання тварин, пультом управління та датчиком витрат, що своїми виходами електрично зв'язані з входами блока управління,...
Дозатор сипучих кормів
Номер патенту: 67024
Опубліковано: 15.06.2004
Автори: Шалімов Віктор Олександрович, Гуцул Василь Іванович, Головатий Сергій Сергійович, Шалімова Марина Олександрівна, Смоквина Володимир Віталійович, Віхрова Лариса Григорівна, Прохватілов Сергій Григорович
МПК: A01K 5/00
Мітки: сипучих, дозатор, кормів
Формула / Реферат:
Дозатор сипучих кормів, що містить бункер, всередині якого вертикально розміщений привідний вал, з жорстко закріпленими перегрібачами, електродвигун, розміщений у верхній частині привідного вала і з'єднаний з муфтою, який відрізняється тим, що бункер обладнано електричними датчиками верхнього і нижнього рівнів корму, системою розпізнавання тварин, пультом управління та датчиком витрат, що своїми виходами електрично зв'язані з входами блока...
Дозатор сипучих кормів
Номер патенту: 64981
Опубліковано: 15.03.2004
Автори: Смоквина Володимир Віталійович, Прохватілов Сергій Григорович, Шалімов Віктор Олександрович, Шалімова Марина Олександрівна, Віхрова Лариса Григорівна, Скобельдин Олександр Вікторович, Головатий Сергій Сергійович, Гуцул Василь Іванович
МПК: A01K 5/02
Мітки: дозатор, сипучих, кормів
Формула / Реферат:
Дозатор сипучих кормів, що містить бункер, всередині якого вертикально розміщений привідний вал з жорстко закріпленими перегрібачами, електродвигун, розміщений у верхній частині привідного вала і з'єднаний з муфтою, який відрізняється тим, що бункер обладнано електричним датчиком верхнього і нижнього рівнів корму, системою розпізнавання тварин, пультом управління та датчиком витрат, що своїми виходами електрично зв'язані з входами блока...
Дозатор сипучих кормів
Номер патенту: 52059
Опубліковано: 16.12.2002
Автори: Жінчин Ярослав Семенович, Банга Василь Іванович, Дмитрів Василь Тарасович, Сиротюк Валерій Миколайович
МПК: A01K 5/02
Мітки: сипучих, кормів, дозатор
Формула / Реферат:
Дозатор сипучих кормів, що містить бункер, в середині якого вертикально розміщений привідний вал з жорстко закріпленими перегрібачами, телескопічний регулювальний циліндр з механізмом регулювання зазору між конусним дозувальним органом, жорстко закріпленим на валу, і телескопічним регулювальним циліндром та кроковий електродвигун з регульованою частотою обертання, який відрізняється тим, що на дозувальному конусі встановлені робочі органи...
Дозатор сипучих кормів
Номер патенту: 40997
Опубліковано: 15.08.2001
Автори: Дмитрів Василь Тарасович, Сиротюк Валерій Миколайович, Банга Василь Іванович, Жінчин Ярослав Семенович
МПК: A01K 5/02
Мітки: кормів, сипучих, дозатор
Формула / Реферат:
Дозатор сипучих кормів, що містить бункер, в середині якого вертикально розміщений привідний вал з жорстко закріпленими перегрібачами, телескопічний регулювальний циліндр з механізмом регулювання зазору між дозувальним робочим органом, жорстко закріпленим на валу, і телескопічним регулювальним циліндром та електродвигун, який відрізняється тим, що дозувальний робочий орган виконаний у формі конуса, кут твірної конуса до його основи менший...
Попередній патент: Спосіб електроерозійної обробки непрофільованим електродом-інструментом у вигляді круглого тонкого дроту
Наступний патент: Спосіб обробки електричною дугою в гідродинамічному потоці робочої рідини із застосуванням непрофільованого стрижневого електрода-інструмента
Випадковий патент: Регенеративний нагрівальний колодязь