Пристрій для регулювання натягу матеріалу при змотуванні в рулон
Номер патенту: 70861
Опубліковано: 15.10.2004
Автори: Кириченко Юрій Олексійович, Островерхов Микола Якович, Кострицький Валерій Всеволодович, Теряєв Віталій Іванович

Формула / Реферат
Пристрій для регулювання натягу матеріалу при змотуванні в рулон, який містить моталку, електропривід моталки, датчик лінійної швидкості матеріалу, задатчик натягу, який відрізняється тим, що задатчик натягу виконано у вигляді програматора, який містить блок формування заданої програми натягу, блок обчислення поточного радіуса рулону, блок визначення корисного моменту електродвигуна, блок визначення моменту втрат в електродвигуні і моталці, блок визначення динамічного моменту електроприводу, блок визначення моменту аеродинамічного опору матеріалу, блок визначення моменту деформації матеріалу при згинанні на рулоні, блок визначення заданого моменту електродвигуна, блок визначення сигналу завдання електроприводу, причому вхід блока обчислення поточного радіуса рулону зв'язано з датчиком лінійної швидкості матеріалу, а вихід - із входами блока формування заданої програми натягу, блока визначення моменту деформації матеріалу при згинанні на рулоні та з першими входами блоків визначення корисного моменту електродвигуна, моменту втрат в електродвигуні і моталці, динамічного моменту електроприводу, моменту аеродинамічного опору матеріалу, другі входи блока визначення корисного моменту електродвигуна та блока визначення моменту втрат в електродвигуні й моталці зв'язано з виходом блока формування заданої програми натягу, другі входи блока визначення динамічного моменту електроприводу та блока визначення моменту аеродинамічного опору матеріалу зв'язано з датчиком лінійної швидкості матеріалу, виходи блоків визначення корисного моменту електродвигуна, моменту втрат в електродвигуні і моталці, динамічного моменту електроприводу, моменту аеродинамічного опору матеріалу, моменту деформації матеріалу при згинанні на рулоні зв'язано з відповідними входами блока визначення заданого моменту електродвигуна, вихід якого зв'язано із входом блока визначення сигналу завдання електроприводу, а вихід останнього зв'язано з електроприводом моталки.
Текст
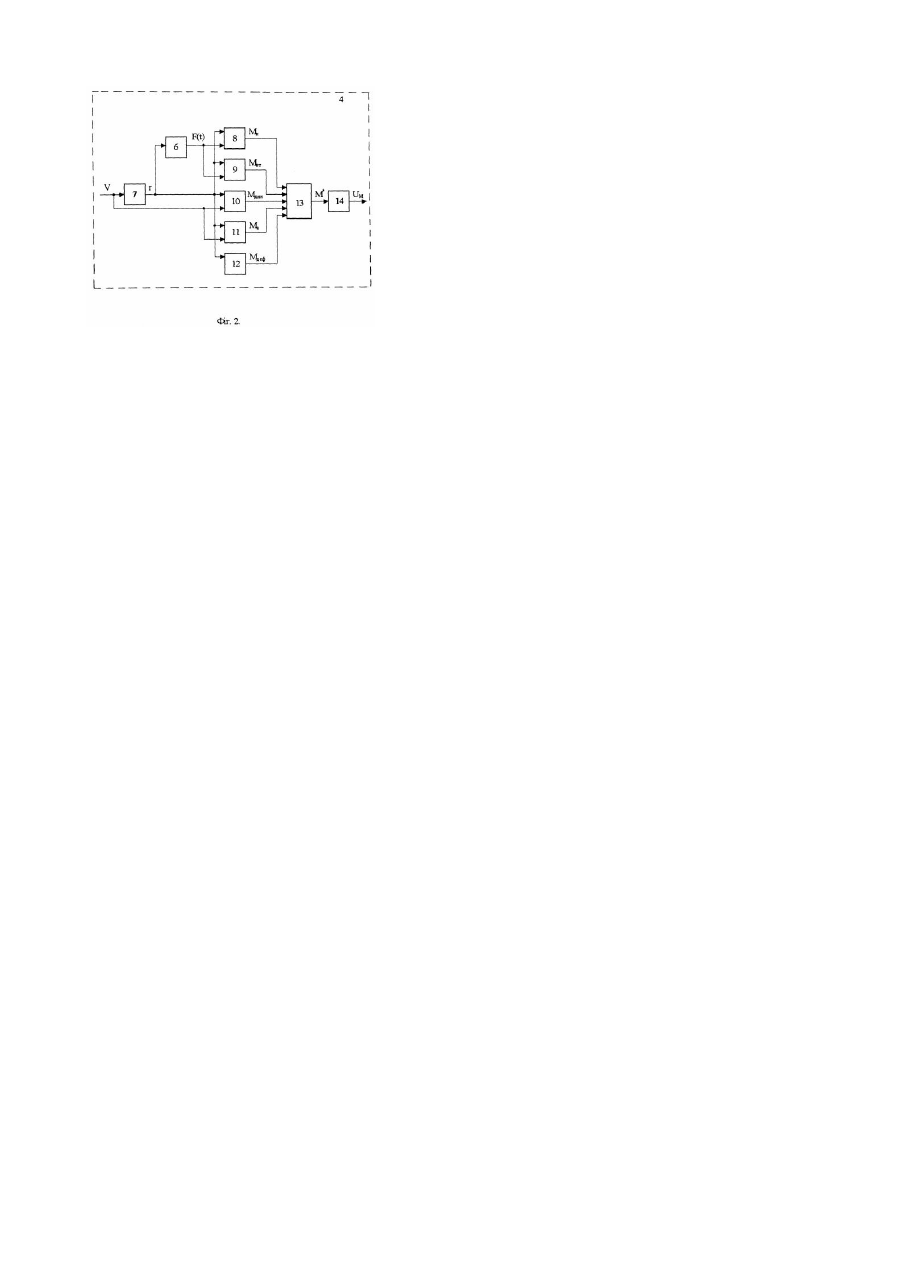
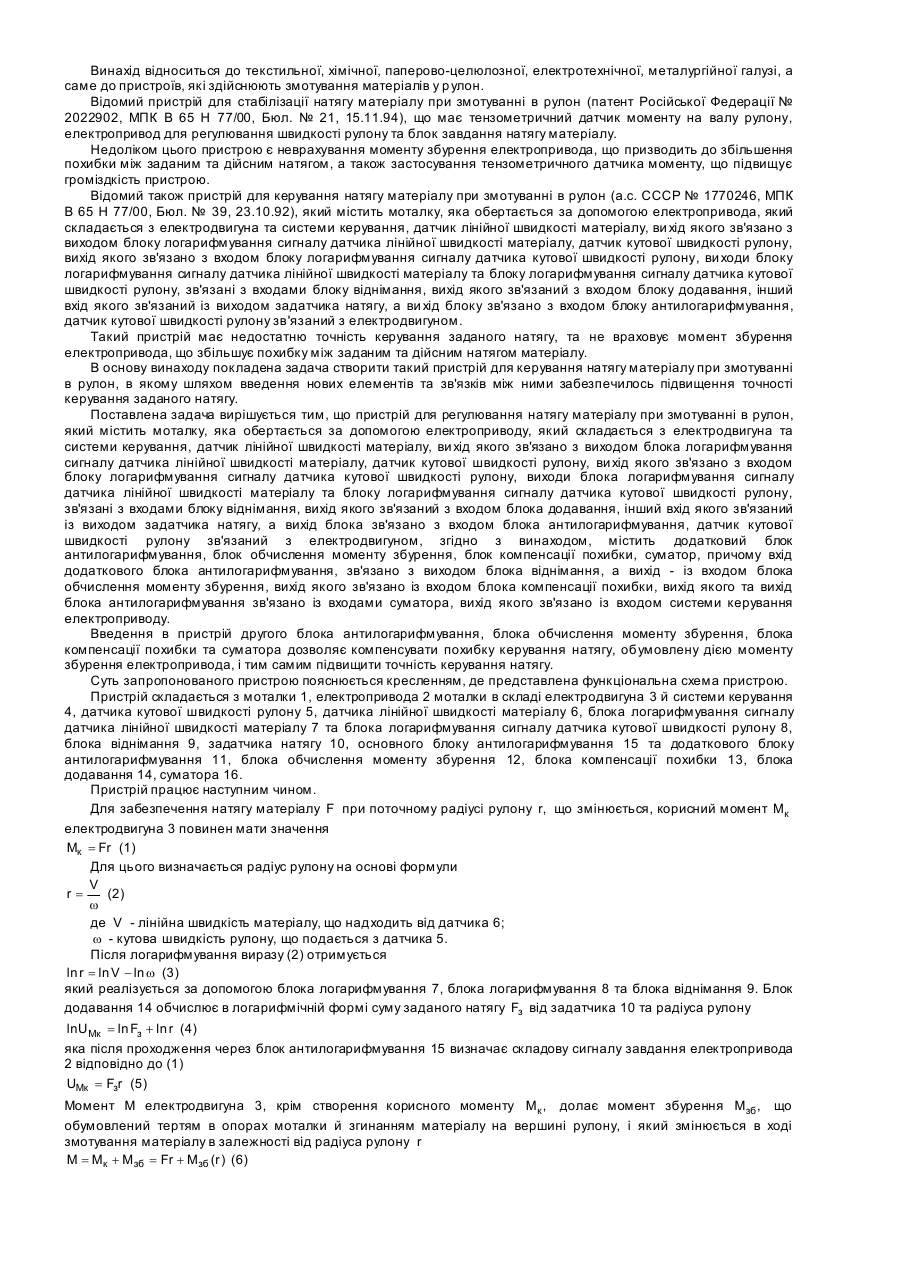
Винахід відноситься до текстильної, хімічної, паперово-целюлозної, електротехнічної, металургійної галузі, а саме до пристроїв, які здійснюють змотування матеріалів у р улон. Відомий пристрій для стабілізації натягу матеріалу при змотуванні у рулон (патент Російської Федерації №2022902, МПКВ65Н77/00, Бюл. №21, 15.11.94), що має тензометричний датчик моменту на валу р улону, електропривод для регулювання кутової швидкості рулону та блок завдання натягу матеріалу, незмінного на період змотування. Недоліком цього пристрою є неможливість керування натягу за заданим законом у процесі змотування, що не забезпечує заданого закону розподілу напружень по товщині рулону, а також неможливість керування натягу при зміні лінійної швидкості матеріалу, неврахування моменту збурення електропривода, що призводить до збільшення похибки між заданим та дійсним натягом, а також необхідність застосування датчика моменту, що підвищує громіздкість пристрою. Відомий також пристрій для регулювання натягу матеріалу при змотуванні в рулон (а.с. СССР №1770246, МПКВ65Н77/00, Бюл. №39, 23.10.92), що містить моталку, електропривод моталки, датчик лінійної швидкості матеріалу, задатчик натягу. Крім того, пристрій має датчик кутової швидкості рулону, два блоки логарифмування, блок антилогарифмування, блок віднімання та суматор. Недоліками пристрою є неврахування моменту збурення електропривода із-за відсутності зворотного зв'язку за збуренням та регульованою величиною, що збільшує похибку між заданим та дійсним натягом, а також потребує використання двох датчиків швидкості, що значно ускладнює технічну реалізацію пристрою. В основу винаходу покладена задача створити такий пристрій для керування натягу матеріалу при змотуванні в рулон, в якому шляхом нового виконання елементів забезпечило би підвищення точності керування заданого натягу та підвищення надійності пристрою. Поставлена задача вирішується тим, що пристрій для регулювання натягу матеріалу при змотуванні в рулон, який містить моталку, електропривод моталки, задатчик лінійної швидкості матеріалу, задатчик натягу, який згідно з винаходом, виконано у вигляді програматора, що містить блок формування заданої програми натягу, блок обчислення поточного радіуса рулону, блок визначення корисного моменту електродвигуна, блок визначення моменту втрат в електродвигуні і моталці, блок визначення динамічного моменту електропривода, блок визначення моменту аеродинамічного опору матеріалу, блок визначення моменту де формації матеріалу при згинанні на рулоні, блок визначення заданого моменту електродвигуна, блок визначення сигналу завдання електропривода, при чому вхід блоку обчислення поточного радіуса рулону зв'язано з датчиком лінійної швидкості матеріалу, а вихід - із входом блоку формування заданої програми натягу й блоку визначення моменту деформації матеріалу при згинанні на рулоні та з першими входами блоків визначення корисного моменту електродвигуна, моменту втрат в електродвигуні і моталці, динамічного моменту електропривода, моменту аеродинамічного опору матеріалу, а другий вхід блоку визначення корисного моменту електродвигуна та блоку визначення моменту втрат в електродвигуні й моталці зв'язано з виходом блоку формування заданої програми натягу, а др угий вхід блоку визначення динамічного моменту електропривода та блоку визначення моменту аеродинамічного опору матеріалу зв'язано з датчиком лінійної швидкості матеріалу, а ви ходи блоків визначення корисного моменту електродвигуна, моменту втрат в електродвигуні і моталці, динамічного моменту електропривода, моменту аеродинамічного опору матеріалу, моменту деформації матеріалу при згинанні на рулоні зв'язано з відповідними входами блоку визначення заданого моменту електродвигуна, вихід якого зв'язано із входом блоку визначення сигналу завдання електропривода, а вихід останнього зв'язано з електроприводом моталки. Введення в пристрій задатчика натягу у вигляді програматора дозволяє обчислювати заданий закон зміни моменту електродвигуна електропривода моталки з урахуванням моменту збурення на протязі всього процесу змотування, що забезпечує підвищення точності керування заданого натягу матеріалу й дозволяє отримати заданий закон розподілу напружень по товщині рулону. При цьому використовується сигнал лише одного датчика лінійної швидкості матеріалу, що підвищує надійність пристрою. Розширення функціональних можливостей пристрою пов'язане з тим, що програматор може бути реалізовано на засобах мікропроцесорної техніки. Суть запропонованого пристрою пояснюється кресленнями, де: фіг.1. - функціональна схема пристрою, фіг.2. - функціональна схема програматора. Пристрій складається з моталки 1, яка обертається за допомогою електропривода, що містить електродвигун 2 та керуючий блок 3, по сигналу задатчика натягу, виконаного у вигляді програматора 4, до якого підключено датчик 5 лінійної швидкості матеріалу програматор 4 вміщує блок формування заданої програми зміни натягу 6, до якого надходить сигнал поточного радіуса рулону з блоку обчислення поточного радіуса рулону 7, що обчислює радіус по сигналу 5 лінійної швидкості матеріалу. Входи блоків: визначення корисного моменту 8, визначення моменту втрат в електродвигуні і моталці 9, визначення динамічного моменту електропривода 10, визначення моменту аеродинамічного опору матеріалу 11, та визначення моменту деформації матеріалу при згинанні в рулоні 12, що обчислюють складові моменту електродвигуна 2, зв'язано з блоком обчислення поточного радіуса рулону 7. До інши х входів блоку визначення корисного моменту 8 та блоку визначення моменту втрат в електродвигуні і моталці 9 надходить сигнал з блоку формування заданої програми зміни натягу 6, а до блоку визначення динамічного моменту електропривода 10 і блоку визначення моменту аеродинамічного опору матеріалу 11 - із датчика 5. Входи блоку визначення заданого моменту електродвигуна 13 підключено до відповідних виходів блоків: блоку визначення корисного моменту 8, блоку визначення моменту втрат в електродвигуні і моталці 9, блоку визначення динамічного моменту електропривода 10, блоку визначення моменту аеродинамічного опору матеріалу 11, та блоку визначення моменту де формації матеріалу при згинанні в рулоні 12. Вихід блоку визначення заданого моменту електродвигуна 13, зв'язано із входом блоку визначення сигналу завдання електропривода 14, що формує сигнал завдання електропривода, тому його ви хід з'єднано з керуючим блоком 3 електропривода. Пристрій працює наступним чином. Вхідним завданням електропривода є сигнал, який поступає від датчика лінійної швидкості матеріалу 5. Цей сигнал за допомогою програматора 4 перетворюється в сигнал завдання Uм , який поступає на керуючий блок 3 електропривода, у вигляді завдання необхідного моменту двигуна 2, який обертає моталку 1. Момент електродвигуна 2 М = Мк + Мзб (1) іде на створення корисного моменту Мк , необхідного для забезпечення заданого натягу F , та на подолання моменту збурення Мзб , який обумовлює похибку між заданим та дійсним натягом. Задачею пристрою є компенсація дії моменту збурення Мзб , що складається з наступних складових Мзб = Мв т + Мдин + Ма + Мдеф (2) де Мв т - момент механічних втрат у системі “двигун-механізм”; Мдин - динамічний момент; Мa - момент аеродинамічного опору матеріалу; Мдеф - момент деформації матеріалу при згинанні на рулоні. Задане значення моменту двигуна M* = M відповідно до (1) обчислюється блоком визначення заданого моменту електродвигуна 13 у програматорі на протязі всього процесу змотування. Блок визначення корисного моменту 8 визначає корисний момент за формулою Mк = F(t ) × r (3) де F(t ) - заданий натяг; r - поточний радіус рулону, що змінюється. При цьому блок формування заданої програми зміни натягу 6 задає програму зміни натягу F(t ) за будь-яким законом, в т.ч. незмінне значення натягу F = const , натяг у залежності від радіуса рулону F(r ) тощо. Поточний радіус рулону обчислюється у блоці 7 за виразом 2 r = r0 + t h ò Vdt p0 (4) r0 - радіус валу моталки; h - товщина матеріалу; V - лінійна швидкість матеріалу, Блок визначення моменту втрат в електродвигуні і моталці 9 обчислює момент механічних втрат, який складається з моменту втрат у двигуні та моменту втрат у механізмі Mв т = Мв т дв + Мв т мех (5) У двигуні механічні втрати визначаються видом двигуна й для асинхронного двигуна становлять 2 3 æ n ö æ D ö (6) = 8ç 0 ÷ ç ÷ è 1000 ø è 100 ø де n0 - частота обертання двигуна при ідеальному холостому ході; Мв т дв D - вн утрішній діаметр статора двигуна. Момент втрат у механізмі знаходиться за формулою [ ( )] [ ( )] hd 2 2 2 G0 + pbrg r 2 - r0 + F2 + 2 G 0 + pbrg r 2 - r0 F sina 2 де h - коефіцієнт тертя в опорах валу моталки; r - питома вага матеріалу; d - діаметр опор валу моталки; b - ширина матеріалу; G0 - вага валу моталки; g - прискорення вільного падіння; Мв т мех a = arctg = (7) rmax + a1 + r - кут намотування; rmax + b1 rmax - кінцевий радіус рулону; a1 = (0,25 - 0,5)rmax - конструкційна стала моталки; b1 = (0,2 - 0,6)rmax - конструкційна стала моталки. Блок визначення динамічного моменту електропривода 10 обчислює динамічний момент, який складається з двох частин Мдин = Мдин1 + Мдин 2 (8) Перша частина обумовлена прискоренням при розгоні та сповільненні рулону J dV (9) Мдин1 = r dt а друга - збільшенням радіуса рулону JhV2 2pr3 де J = J0 + Jr - момент інерції пристрою; Мдин 2 = (10) J0 = Jдв + Jмот - незмінний момент інерції; J дв - момент інерції двигуна; Jмот - момент інерції моталки; ( ) pr b 4 4 - змінний момент інерції рулону. (11) r - r0 2 Момент аеродинамічного опору визначається у блоці визначення моменту аеродинамічного опору матеріалу 11 за виразом é 2 ù 4 ê0,664pr п rкр - r 4 n 0 V + ú ê ú+ r3 Ma = 2ê ú 2 ê + 0,0196r R0,2 V r 4, 8 - r 4, 8 ú п z max кр ú ê r2 ë û (12) 2 + 0,0664bV rh0 Reкр + Jr = ( ) ( ) 2 [ ] æ 0,83n0 ö + 0,0187rп V2br ç Rz + ÷ (2p )0,8 - (2pr0 )0,8 + V ø è + 0,32V2 rпbrb1 / Reкр де r п - питома вага повітря; rкр = Reкр n0 r V - критичний радіус; Reкр = 105 + 816 V - 16,6 ×10 5 Dmax + 2 4 6 2 + 47 V + 8,8 ×10 VD max + 2,3 × 10 Dmax - число Рейнольдса; Dmax - кінцевий діаметр рулону; n 0 - кінематична в'язкість повітря; h 0 - динамічна в'язкість повітря; Rz - шорсткість матеріалу. Блок визначення моменту деформації матеріалу при згинанні в рулоні 12 обчислює момент деформації матеріалу при згинанні на рулоні Eh3b (13) 24r2 де E - модуль пружності матеріалу. Сигнал завдання електропривода Uм визначається блоком 14 Мдеф = Uм = М * / Км (14) де Км - коефіцієнт передачі електропривода за моментом. Завдяки новому виконанню задатчика натягу у вигляді програматора, який обчислює сигнал завдання електропривода моталки згідно (14) з урахуванням моменту збурення на основі виразів (2)-(13) за сигналом лише одного датчика 5 лінійної швидкості матеріалу V , здійснюється програмне керування натягу з використанням принципу інваріантності від зовнішніх збурень, що забезпечує підвищення точності керування заданого натягу та надійності пристрою.
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for adjustment of tension of material at winding
Автори англійськоюKostrytskyi Valerii Vsevolodovych
Назва патенту російськоюУстройство для регулировки натяжения материала при сматывании в рулон
Автори російськоюКострицкий Валерий Всеволодович
МПК / Мітки
МПК: B65H 77/00
Мітки: матеріалу, змотуванні, рулон, натягу, пристрій, регулювання
Код посилання
<a href="https://ua.patents.su/4-70861-pristrijj-dlya-regulyuvannya-natyagu-materialu-pri-zmotuvanni-v-rulon.html" target="_blank" rel="follow" title="База патентів України">Пристрій для регулювання натягу матеріалу при змотуванні в рулон</a>
Пристрій для регулювання натягу матеріалу при змотуванні в рулон
Номер патенту: 70226
Опубліковано: 15.09.2004
Автори: Островерхов Микола Якович, Теряєв Віталій Іванович, Кириченко Юрій Олексійович, Кострицький Валерій Всеволодович
МПК: B65H 77/00
Мітки: рулон, матеріалу, пристрій, змотуванні, регулювання, натягу
Формула / Реферат:
Пристрій для регулювання натягу матеріалу при змотуванні в рулон, який містить моталку, яка обертається за допомогою електроприводу, який складається з електродвигуна та системи керування, датчик лінійної швидкості матеріалу, вихід якого зв'язаний з виходом блока логарифмування сигналу датчика лінійної швидкості матеріалу, датчик кутової швидкості рулона, вихід якого зв'язано з входом блока логарифмування сигналу датчика кутової швидкості...
Пристрій для регулювання натягу плівкового матеріалу при намотці в рулон
Номер патенту: 11496
Опубліковано: 25.12.1996
Автори: Воронецький Ігор Якович, Охмакевич Васииль Федорович
МПК: G11B 15/46, B65H 23/04
Мітки: регулювання, натягу, намотці, пристрій, рулон, матеріалу, плівкового
Формула / Реферат:
Устройство для регулирования натяжения пленочного материала при намотке в рулон, содержащее датчик диаметра рулона и датчик натяжения, подключенный к одному из входов регулятора натяжения, выход которого посредством тиристорного преобразователя электрически связан с двигателем намотки рулона, отличающееся тем, что, с целью повышения качества намотки, оно имеет масштабный усилитель, усилитель-ограничитель и усилитель-ограничитель с зоной...
Пристрій для автоматичного регулювання натягу довгомірного матеріалу
Номер патенту: 11505
Опубліковано: 25.12.1996
Автори: Бондарчук Петро Максимович, Ясь Василь Михайлович, Воронецький Ігор Якович, Охмакевич Василь Федорович
МПК: B65H 77/00
Мітки: регулювання, натягу, матеріалу, пристрій, довгомірного, автоматичного
Формула / Реферат:
Устройство для автоматического регулирования натяжения длинномерного материала, содержащее регулятор скорости, включающий тахогенератор, кинематически связанный с валом электропривода механизма подачи материала, регулятор тока и блок управления, связанные с электроприводом механизма натяжения материала, отличающееся тем, что, с целью повышения точности регулирования, оно имеет потенциометр и дополнительный тахогенератор, электрически...
Спосіб регулювання натягу на моталці дрібносортного стану
Номер патенту: 63426
Опубліковано: 15.01.2004
Автори: Куваєв Володимир Миколайович, Шеремет Володимир Олександрович, Бабенко Михайло Антонович, Чигринський Володимир Олександрович, Карпинський Юрій Пантелеймонович, Політов Ігор Віталійович, Скляр Олександр Всеволодович, Кекух Анатолій Володимирович, Козуненко Анатолій Григорович, Щур Віталій Андрійович
МПК: B21C 47/00
Мітки: регулювання, натягу, дрібносортного, моталці, стану, спосіб
Формула / Реферат:
Спосіб регулювання натягу на моталці дрібносортного стану, за яким задають натяг прокату шляхом задавання струму приводу моталки і його коректування при змотуванні прокату, який відрізняється тим, що попередньо задають величину прогину прокату за останньою кліттю стану, вимірюють прогин прокату за останньою кліттю стану, а задавання струму приводу моталки коректують у процесі змотування прокату залежно від відхилення вимірюваної величини його...
Спосіб вимірювання натягу
Номер патенту: 40922
Опубліковано: 15.08.2001
Автори: Раздобаров Віктор Георгійович, Чаков Олександр Миколайович, Сацюк Валерій Іванович, Єрмоленко Анатолій Олександрович, Сімененко Олег Володимирович
МПК: G01L 5/04
Мітки: спосіб, натягу, вимірювання
Формула / Реферат:
Спосіб вимірювання натягу, що включає вимірювання зусилля, яке передає смуга на вимірювальний ролик з датчиками сили, визначення кута обхвату смугою вимірювального ролика і коефіцієнта корекції зусилля, що сприймають датчики сили, який відрізняється тим, що кут обхвату і коефіцієнт корекції визначають безперервно в залежності від змінного радіуса рулону на моталці та розмірів конструкції:φ = f(li,R), К=F(Іі,R), де R...
Попередній патент: Спосіб підготовки емульсії
Наступний патент: Спосіб переробки побічної свинцевої сировини
Випадковий патент: Пристрій для профілактики й фізіотерапії дерматологічних захворювань