Спосіб для визначення відстаней переміщення
Номер патенту: 71950
Опубліковано: 25.07.2012
Автори: Осадчук Володимир Степанович, Радчук Альона Сергіївна, КРАВЧЕНКО ЮРІЙ СТЕПАНОВИЧ, Осадчук Олександр Володимирович

Формула / Реферат
Спосіб для визначення відстаней переміщення, в якому оптичне випромінювання з джерела світла реєструють за допомогою фотоприймачів, який відрізняється тим, що перетворюють переміщення у частотний сигнал за допомогою використання світлових променів від поверхні, яка переміщується, частота яких залежить від інтенсивності випромінювання темних та світлих смуг від рухомої поверхні, а самі частотні сигнали порівнюють між собою, і за величиною різниці частот визначають переміщення рухомої поверхні.
Текст
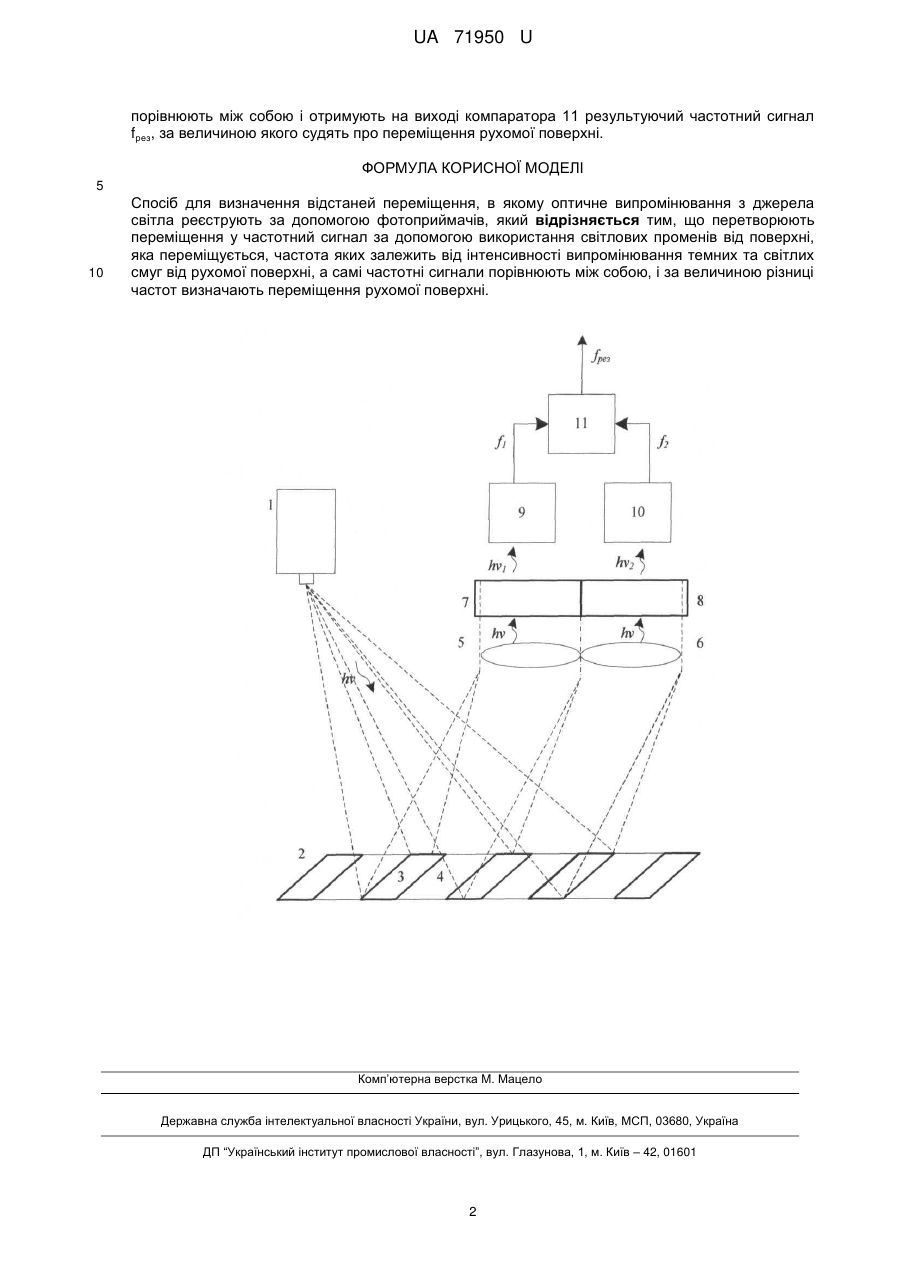
Реферат: Спосіб для визначення відстаней переміщення включає оптичне випромінювання з джерела світла, реєстрацію за допомогою фотоприймачів, перетворення переміщення у частотний сигнал, а самі частотні сигнали порівнюють між собою, за величиною різниці частот визначають переміщення рухомої поверхні. UA 71950 U (54) СПОСІБ ДЛЯ ВИЗНАЧЕННЯ ВІДСТАНЕЙ ПЕРЕМІЩЕННЯ UA 71950 U UA 71950 U 5 10 15 20 25 30 35 40 45 50 55 Корисна модель належить до галузі вимірювальної техніки і може бути використана для вимірювання переміщення та вібрацій безконтактним методом. Відомий спосіб для визначення відстаней переміщення, [Патент Росії №2282867, м.кл. G 01 S 1/08, опубл. 27.08.2006], в якому бортове обладнання, призначеного для вимірювання азимутального і кутового напрямків і розміщення рухомого об'єкта на великій відстані, з використанням електромагнітних каналів зв'язку між бортовим обладнанням об'єкта та відповідним маяком, при якому на маяку формують і передають за допомогою передавальної системи маяка в бортове обладнання рухомого об'єкта електромагнітні сигнали, приймають їх бортовою приймальною системою, за сигналами від згаданих маяків та відповідних бортових сенсорів обчислюють і відображають на індикаторах бортового обладнання рухомого об'єкта відстань від цих маяків до об'єкта. Недоліком такого способу є його низька чутливість, що особливо відчутно в умовах реєстрації малих переміщень. Найближчим аналогом до даної корисної моделі можна вважати спосіб для реєстрації переміщень оптичними сенсорами [Патент Росії № 2343403, м.кл. G 01 В 11/00, опубл. 10.01.2009], в якому оптичне випромінювання з джерела світла реєструють за допомогою фотоприймачів, які розміщують в площині екрана за площею проекції інтерферограми, переміщення поверхні об'єкта визначають як результат непрямого вимірювання за значеннями інтенсивності оптичного поля, отриманим прямим виміром в заданих областях інтерферограми з використанням виділених груп фотоприймачів. Одночасно з цим реєструють сумарну інтенсивність оптичного поля по площі інтерферограми, яку контролюють в процесі вимірювання переміщень безперервно, при незмінності сумарної інтенсивності оптичного поля по площі інтерферограми або її відхилення в допустимих межах реєструють результати вимірювань. Проводячи обробку результатів вимірювань інтенсивності з виділених груп фотоприймачів, при відхиленнях сумарної інтенсивності оптичного поля по площі інтерферограми, що перевищують допустимі значення, закінчують процес вимірювань. Недоліком даного способу є його низька чутливість, яка пов'язана з тим, що для визначення процесу переміщення використовується аналоговий сигнал та складність реєстрації інтенсивності оптичного поля по площині інтерферограми. В основу корисної моделі поставлена задача створення способу для визначення відстаней переміщення, в якому за рахунок введення нових операцій та їхньої послідовності досягається можливість реєстрації переміщення по поверхні, вздовж якої ведеться контроль переміщення, що призводить до підвищення чутливості і достовірності контролю цільового процесу. Поставлена задача вирішується тим, що в спосіб для визначення відстаней переміщення, в якому оптичне випромінювання з джерела світла реєструють за допомогою фотоприймачів, перетворюють переміщення у частотний сигнал за допомогою використання світлових променів від поверхні, яка переміщується, частота яких залежить від інтенсивності випромінювання темних та світлих смуг від рухомої поверхні, а самі частотні сигнали порівнюють між собою і за величиною різниці частот визначають переміщення рухомої поверхні. На кресленні наведено схему пристрою для реалізації способу для визначення відстаней переміщення. Пристрій містить джерело світла 1, яке оптично пов'язане з рухомою поверхню 2, що містить темні 3 та світлі 4 смуги, оптично пов'язану з першою 5 та другою 6 фокусуючими лінзами і першого 7 та другого 8 оптичних фільтрів, частотний компаратор 11, перший вхід якого з'єднано з виходом першого оптичного частотного перетворювача 9, а другий вхід - з виходом другого оптичного перетворювача 10. Спосіб здійснюється наступним чином. Оптичне випромінення з джерела світла 1 потрапляє на рухому робочу поверхню 2, відбивається на першу 5 та другу 6 фокусуючі лінзи і пропускається через перший 7 та другий 8 оптичні фільтри, де із загального спектра оптичного випромінювання реєструють інтенсивність оптичного випромінювання темної 3 та світлої 4 смуги, яка залежить від відбиття оптичного випромінювання з рухомої поверхні 2, що відповідають за процес переміщення рухомої поверхні 2. Оптичний сигнал з першого 7 оптичного фільтра подається на вхід першого 9 оптичного частотного перетворювача, де перетворюється в електричний частотний сигнал з частотою /,,а оптичний сигнал з другого 8 оптичного фільтра подається на вхід другого 10 оптичного частотного перетворювача, де його перетворюють в електричний сигнал частотою f 2. Частотний сигнал f1 з виходу 7 першого оптичного перетворювача подають на перший вхід частотного компаратора 11, а частотний сигнал f2 з виходу другого 10 оптичного перетворювача подають на другий вхід частотного компаратора 11. В частотному компараторі 11 сигнали f 1 та f2 1 UA 71950 U порівнюють між собою і отримують на виході компаратора 11 результуючий частотний сигнал fрез, за величиною якого судять про переміщення рухомої поверхні. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 5 10 Спосіб для визначення відстаней переміщення, в якому оптичне випромінювання з джерела світла реєструють за допомогою фотоприймачів, який відрізняється тим, що перетворюють переміщення у частотний сигнал за допомогою використання світлових променів від поверхні, яка переміщується, частота яких залежить від інтенсивності випромінювання темних та світлих смуг від рухомої поверхні, а самі частотні сигнали порівнюють між собою, і за величиною різниці частот визначають переміщення рухомої поверхні. Комп’ютерна верстка M. Мацело Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 2
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for determination of distances of displacement
Автори англійськоюOsadchuk Volodymyr Stepanovych, Kravchenko Yurii Stepanovych, Osadchuk Oleksandr Volodymyrovych, Radchuk Aliona Serhiivna
Назва патенту російськоюСпособ для определения расстояний перемещения
Автори російськоюОсадчук Владимир Степанович, Кравченко Юрий Степанович, Осадчук Александр Владимирович, Радчук Алена Сергеевна
МПК / Мітки
МПК: G01B 11/00
Мітки: переміщення, визначення, відстаней, спосіб
Код посилання
<a href="https://ua.patents.su/4-71950-sposib-dlya-viznachennya-vidstanejj-peremishhennya.html" target="_blank" rel="follow" title="База патентів України">Спосіб для визначення відстаней переміщення</a>
Спосіб визначення відстаней до місць пошкодження електричної лінії
Номер патенту: 64142
Опубліковано: 16.02.2004
Автори: Любчик Віталій Романович, Горященко Костянтин Леонідович, Троцишин Іван Васильович
МПК: G01R 31/08
Мітки: спосіб, відстаней, місць, лінії, пошкодження, електричної, визначення
Формула / Реферат:
Спосіб визначення відстаней до місць пошкодження електричної лінії, який включає розділення випробувального сигналу на опорний і вимірювальний, прийняття відбитого сигналу, вимірювання часу появи кожного відбиття та вимірювання різниць фаз між прийнятим сигналом та опорним і обчислення довжин відстаней до неоднорідностей, який відрізняється тим, що відстані вираховують із зв'язків результатів імпульсної рефлектометрії з результатами...
Спосіб визначення моменту закінчення процесу плазмохімічного травлення

Номер патенту: 26976
Опубліковано: 10.10.2007
Автори: КРАВЧЕНКО ЮРІЙ СТЕПАНОВИЧ, Кравченко Сергій Юрійович, Осадчук Володимир Степанович, Осадчук Олександр Володимирович
МПК: H01L 21/302
Мітки: визначення, плазмохімічного, спосіб, закінчення, процесу, травлення, моменту
Формула / Реферат:
Спосіб визначення моменту закінчення процесу плазмохімічного травлення, в якому власне оптичне випромінювання плазми розділяють за допомогою оптичних вузькосмугових фільтрів на інформативне і фонове, який відрізняється тим, що інформативне і фонове оптичне випромінювання за допомогою оптичних частотних перетворювачів перетворюють в електричні частотні сигнали, частота яких залежить від інтенсивності випромінювання, а самі частотні сигнали...
Спосіб визначення поперечного переміщення віддаленого об’єкта і пристрій для його здійснення
Номер патенту: 95041
Опубліковано: 25.06.2011
Автор: Соколов Володимир Олександрович
МПК: G01B 11/00, G01B 9/02
Мітки: віддаленого, об'єкта, пристрій, здійснення, визначення, переміщення, поперечного, спосіб
Формула / Реферат:
1. Спосіб визначення поперечного переміщення віддаленого об'єкта, в якому перетворюють поперечне переміщення об'єкта в зміну центру тяжіння частотного спектра випромінювання лазера з зовнішньою оптичною системою частотно селективного зворотного зв'язку, для чого здійснюють механічний зв'язок між об'єктом і компонентом зовнішньої оптичної системи, поперечне переміщення якого змінює частоту максимуму коефіцієнта зворотного зв'язку; вимірюють...
Спосіб вимірювання відстаней у водному середовищі
Номер патенту: 27648
Опубліковано: 12.11.2007
Автори: Бурачек Всеволод Германович, Боровий Валентин Олександрович, Куреньов Юрій Петрович, Мамонтова Людмила Степанівна
МПК: G01S 13/00
Мітки: вимірювання, відстаней, спосіб, водному, середовищі
Формула / Реферат:
Спосіб вимірювання відстаней у водному середовищі, який заснований на застосуванні методу імпульсної гідролокації, який відрізняється тим, що частоту імпульсів, які випромінюються, змінюють таким чином, щоб результуюча частота прийнятих імпульсів, які складаються з відбитих від підводного об'єкта та випромінюваних, була подвоєною відносно частоти випромінюваних імпульсів; при цьому результуючу частоту ділять навпіл і порівнюють одержану...
Спосіб вимірювання кутових відстаней
Номер патенту: 7901
Опубліковано: 15.07.2005
Автор: Бандирська Ореста Володимирівна
Мітки: вимірювання, кутових, спосіб, відстаней
Формула / Реферат:
Спосіб вимірювання кутових відстаней, який передбачає фіксацію і наступне порівнювання вимірюваної відстані з послідовністю еталонних відстаней, як послідовність еталонних відстаней використовують послідовність кутових проміжків між променями, що виходять з однієї спільної точки і утворюють нерівні один відносно одного кути, кратні найменшому з них.
Попередній патент: Спосіб вимірювання витрат рідини в трубопроводі
Наступний патент: Спосіб виділення контуру слабоконтрастних розмитих зображень
Випадковий патент: Спосіб одержання полімерного каталізатора