Відмовостійка система керування швидкістю обертання турбіни
Номер патенту: 76051
Опубліковано: 25.12.2012
Автори: Гармаш Денис Вікторович, Симонов Володимир Федорович


Формула / Реферат
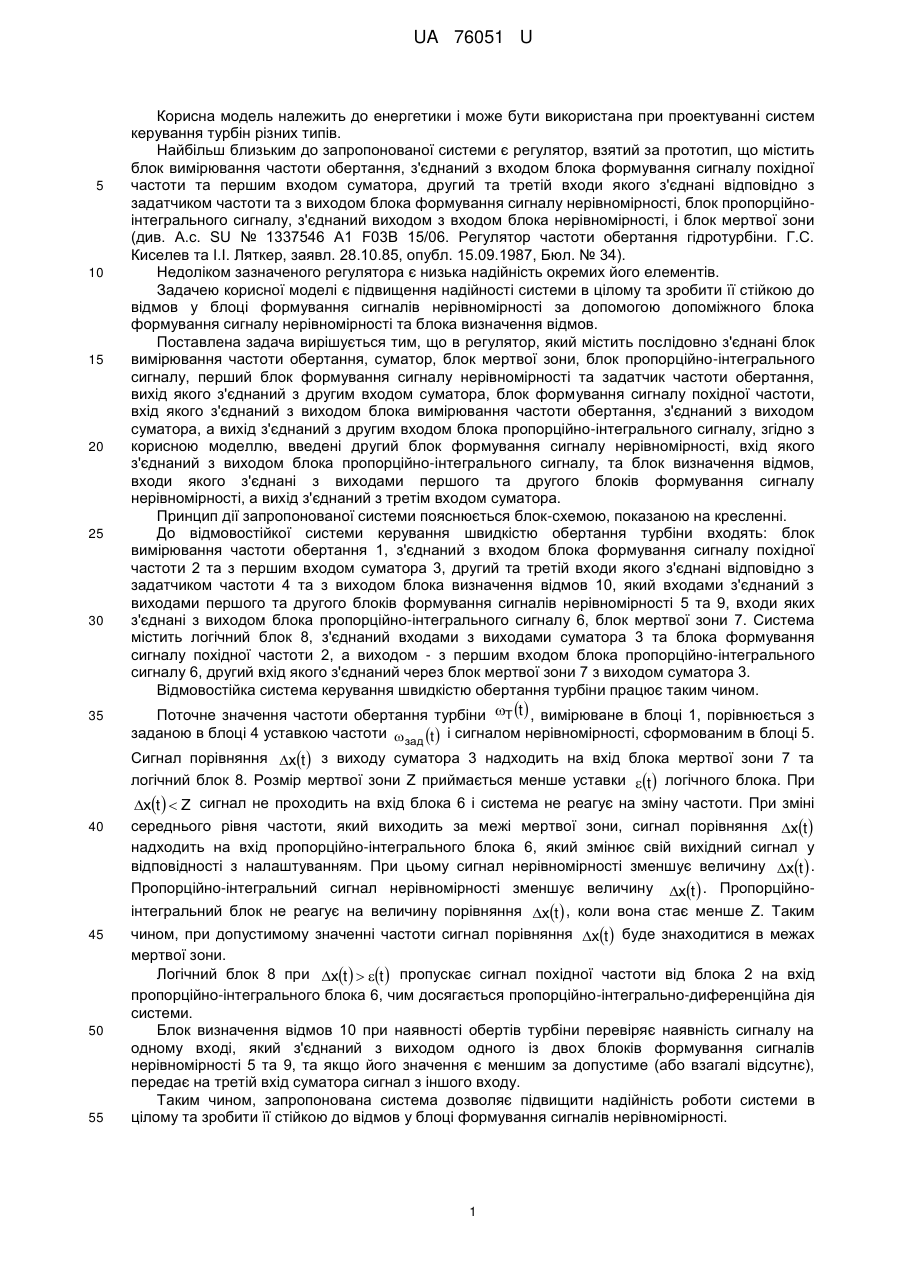
Відмовостійка система керування швидкістю обертання турбіни, що містить послідовно з'єднані блок вимірювання частоти обертання, суматор, блок мертвої зони, блок пропорційно-інтегрального сигналу, перший блок формування сигналу нерівномірності та задатчик частоти обертання, вихід якого з'єднаний з другим входом суматора, блок формування сигналу похідної частоти, вхід якого з'єднаний з виходом блока вимірювання частоти обертання, а вихід з'єднаний з першим входом логічного блока, другий вхід якого з'єднаний з виходом суматора, а вихід з'єднаний з другим входом блока пропорційно-інтегрального сигналу, яка відрізняється тим, що в систему введені другий блок формування сигналу нерівномірності, вхід якого з'єднаний з виходом блока пропорційно-інтегрального сигналу, та блок визначення відмов, входи якого з'єднані з виходами першого та другого блоків формування сигналу нерівномірності, а вихід з'єднаний з третім входом суматора.
Текст
Реферат: UA 76051 U UA 76051 U 5 10 15 20 25 30 35 Корисна модель належить до енергетики і може бути використана при проектуванні систем керування турбін різних типів. Найбільш близьким до запропонованої системи є регулятор, взятий за прототип, що містить блок вимірювання частоти обертання, з'єднаний з входом блока формування сигналу похідної частоти та першим входом суматора, другий та третій входи якого з'єднані відповідно з задатчиком частоти та з виходом блока формування сигналу нерівномірності, блок пропорційноінтегрального сигналу, з'єднаний виходом з входом блока нерівномірності, і блок мертвої зони (див. А.с. SU № 1337546 А1 F03В 15/06. Регулятор частоти обертання гідротурбіни. Г.С. Киселев та І.І. Ляткер, заявл. 28.10.85, опубл. 15.09.1987, Бюл. № 34). Недоліком зазначеного регулятора є низька надійність окремих його елементів. Задачею корисної моделі є підвищення надійності системи в цілому та зробити її стійкою до відмов у блоці формування сигналів нерівномірності за допомогою допоміжного блока формування сигналу нерівномірності та блока визначення відмов. Поставлена задача вирішується тим, що в регулятор, який містить послідовно з'єднані блок вимірювання частоти обертання, суматор, блок мертвої зони, блок пропорційно-інтегрального сигналу, перший блок формування сигналу нерівномірності та задатчик частоти обертання, вихід якого з'єднаний з другим входом суматора, блок формування сигналу похідної частоти, вхід якого з'єднаний з виходом блока вимірювання частоти обертання, з'єднаний з виходом суматора, а вихід з'єднаний з другим входом блока пропорційно-інтегрального сигналу, згідно з корисною моделлю, введені другий блок формування сигналу нерівномірності, вхід якого з'єднаний з виходом блока пропорційно-інтегрального сигналу, та блок визначення відмов, входи якого з'єднані з виходами першого та другого блоків формування сигналу нерівномірності, а вихід з'єднаний з третім входом суматора. Принцип дії запропонованої системи пояснюється блок-схемою, показаною на кресленні. До відмовостійкої системи керування швидкістю обертання турбіни входять: блок вимірювання частоти обертання 1, з'єднаний з входом блока формування сигналу похідної частоти 2 та з першим входом суматора 3, другий та третій входи якого з'єднані відповідно з задатчиком частоти 4 та з виходом блока визначення відмов 10, який входами з'єднаний з виходами першого та другого блоків формування сигналів нерівномірності 5 та 9, входи яких з'єднані з виходом блока пропорційно-інтегрального сигналу 6, блок мертвої зони 7. Система містить логічний блок 8, з'єднаний входами з виходами суматора 3 та блока формування сигналу похідної частоти 2, а виходом - з першим входом блока пропорційно-інтегрального сигналу 6, другий вхід якого з'єднаний через блок мертвої зони 7 з виходом суматора 3. Відмовостійка система керування швидкістю обертання турбіни працює таким чином. Поточне значення частоти обертання турбіни T t , вимірюване в блоці 1, порівнюється з заданою в блоці 4 уставкою частоти зад t і сигналом нерівномірності, сформованим в блоці 5. Сигнал порівняння хt з виходу суматора 3 надходить на вхід блока мертвої зони 7 та логічний блок 8. Розмір мертвої зони Z приймається менше уставки t логічного блока. При хt Z сигнал не проходить на вхід блока 6 і система не реагує на зміну частоти. При зміні 40 середнього рівня частоти, який виходить за межі мертвої зони, сигнал порівняння хt надходить на вхід пропорційно-інтегрального блока 6, який змінює свій вихідний сигнал у відповідності з налаштуванням. При цьому сигнал нерівномірності зменшує величину хt . хt . Пропорційноінтегральний блок не реагує на величину порівняння хt , коли вона стає менше Z. Таким чином, при допустимому значенні частоти сигнал порівняння хt буде знаходитися в межах мертвої зони. Логічний блок 8 при хt t пропускає сигнал похідної частоти від блока 2 на вхід пропорційно-інтегрального блока 6, чим досягається пропорційно-інтегрально-диференційна дія системи. Блок визначення відмов 10 при наявності обертів турбіни перевіряє наявність сигналу на одному вході, який з'єднаний з виходом одного із двох блоків формування сигналів нерівномірності 5 та 9, та якщо його значення є меншим за допустиме (або взагалі відсутнє), передає на третій вхід суматора сигнал з іншого входу. Таким чином, запропонована система дозволяє підвищити надійність роботи системи в цілому та зробити її стійкою до відмов у блоці формування сигналів нерівномірності. Пропорційно-інтегральний сигнал нерівномірності зменшує величину 45 50 55 1 UA 76051 U ФОРМУЛА КОРИСНОЇ МОДЕЛІ 5 10 Відмовостійка система керування швидкістю обертання турбіни, що містить послідовно з'єднані блок вимірювання частоти обертання, суматор, блок мертвої зони, блок пропорційноінтегрального сигналу, перший блок формування сигналу нерівномірності та задатчик частоти обертання, вихід якого з'єднаний з другим входом суматора, блок формування сигналу похідної частоти, вхід якого з'єднаний з виходом блока вимірювання частоти обертання, а вихід з'єднаний з першим входом логічного блока, другий вхід якого з'єднаний з виходом суматора, а вихід з'єднаний з другим входом блока пропорційно-інтегрального сигналу, яка відрізняється тим, що в систему введені другий блок формування сигналу нерівномірності, вхід якого з'єднаний з виходом блока пропорційно-інтегрального сигналу, та блок визначення відмов, входи якого з'єднані з виходами першого та другого блоків формування сигналу нерівномірності, а вихід з'єднаний з третім входом суматора. Комп’ютерна верстка М. Ломалова Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 2
ДивитисяДодаткова інформація
Назва патенту англійськоюFailure-free system of control of rate of rotation of a turbine
Автори англійськоюSymonov Volodymyr Fedorovych, Harmash Denys Viktorovych
Назва патенту російськоюОтказоустойчивая система управления скоростью вращения турбины
Автори російськоюСимонов Владимир Федорович, Гармаш Денис Викторович
МПК / Мітки
МПК: F03B 15/00
Мітки: керування, відмовостійка, обертання, система, турбіни, швидкістю
Код посилання
<a href="https://ua.patents.su/4-76051-vidmovostijjka-sistema-keruvannya-shvidkistyu-obertannya-turbini.html" target="_blank" rel="follow" title="База патентів України">Відмовостійка система керування швидкістю обертання турбіни</a>
Відмовостійка система керування боковим рухом безпілотного літального апарата

Номер патенту: 35088
Опубліковано: 26.08.2008
Автори: Симонов Володимир Федорович, Амеліна Ірина Вікторівна, Бандура Іван Миколайович
МПК: G05D 1/03, B64C 13/00
Мітки: літального, система, відмовостійка, безпілотного, апарата, керування, боковим, рухом
Формула / Реферат:
Відмовостійка система керування боковим рухом безпілотного літального апарата, що містить перший датчик кутової швидкості рискання, перший та другий суматори, перший та другий підсилювачі, привід керма напрямку, датчик положення керма напрямку, перший датчик кутової швидкості крену, привід елеронів, обчислювач значень кута крену, перший, другий датчики тиску, датчик положення елеронів, блок віднімання, формувач значень сигналу кута ковзання,...
Відмовостійка система кутової стабілізації безпілотного літального апарата
Номер патенту: 63176
Опубліковано: 26.09.2011
Автори: Симонов Володимир Федорович, Бойко Євгенія Анатоліївна
МПК: G05D 1/03
Мітки: відмовостійка, система, стабілізації, апарата, безпілотного, літального, кутової
Формула / Реферат:
Відмовостійка система кутової стабілізації безпілотного літального апарата, що містить задавальний пристрій, вихід якого з'єднаний з першим входом першого суматора, вихід якого з'єднаний з регулятором, вихід якого з'єднаний з першим входом другого суматора, вихід якого з'єднаний з сервоприводом, вихід якого з'єднаний з безпілотним літальним апаратом, дані про кут тангажа та кутову швидкість подаються на датчик кута тангажа та датчик кутової...
Відмовостійка система керування літальним апаратом
Номер патенту: 36472
Опубліковано: 27.10.2008
Автор: Кулік Анатолій Степанович
МПК: G05D 1/10
Мітки: літальним, система, відмовостійка, апаратом, керування
Формула / Реферат:
Відмовостійка система керування літальним апаратом, що має аналого-цифровий перетворювач, бортову обчислювальну машину, цифро-аналоговий перетворювач, причому виходи аналого-цифрового перетворювача з'єднані з входами бортової цифрової обчислювальної машини, виходи якої з'єднані з входами цифро-аналогового перетворювача об'єкта керування, яка відрізняється тим, що містить блок відмовостійких сервоприводів, блок відмовостійких давачів, причому...
Відмовостійка система
Номер патенту: 78785
Опубліковано: 25.04.2007
Автори: Кулік Анатолій Степанович, Кривцов Володимир Станіславович
МПК: G06F 13/20, G06F 11/18, G06F 13/16
Мітки: система, відмовостійка
Формула / Реферат:
Відмовостійка система, яка має n блоків, що резервуються, n елементів нерівнозначність, n елементів І, пороговий елемент, вихід системи, n виходів індикації технічного стану об’єкта, n детекторів фронту, n детекторів спаду, n тригерів, причому вихід і-го блока, що резервується, (і=1, 2,..., n) з’єднаний з першим входом і-го елемента І, вихід і-го елемента "нерівнозначність" з’єднаний з другим входом і-го елемента І, вихід якого...
Система керування швидкістю транспортного засобу лінійними двигунами

Номер патенту: 56276
Опубліковано: 15.05.2003
Автори: Зайцев Григорій Фролович, Бурсов Генадій Володимирович, Градобоєва Неля Вікторівна
МПК: H02P 5/00, B60L 15/20, B60L 13/00
Мітки: лінійними, система, засобу, двигунами, керування, транспортного, швидкістю
Формула / Реферат:
Система керування швидкістю транспортного засобу лінійними двигунами, який складається з програмного пристрою, що виробляє необхідне поточне значення швидкості прямування транспортного засобу, датчика швидкості прямування транспортного засобу, інтегратора, включеного між датчиком швидкості і програмним пристроєм, елемента порівняння швидкостей, на прямий вхід якого надходить сигнал із програмного пристрою, а на інвертуючий вхід - із датчика...
Попередній патент: Спосіб лікування гінекологічних запальних захворювань
Наступний патент: Спосіб відробки запасів і охорони гірничої виробки
Випадковий патент: Композиція фінафлоксацину у вигляді суспензії