Пристрій регулювання міжклітьового натягу смуги при гарячій прокатці
Номер патенту: 78756
Опубліковано: 25.04.2007
Автори: Стеч Володимир Станіславович, Єлецьких Володимир Іванович, Леонідов-Каневський Євген Володимирович, Гагарін Павло Павлович, Капорович Світлана Едуардівна, Барабаш Андрій Володимирович

Формула / Реферат
1. Пристрій регулювання міжклітьового натягу смуги при гарячій прокатці, що включає попередню і наступну прокатні кліті з встановленими в станинах робочими валками і подушками, блок натягу смуги з датчиком положення натяжного пристрою, наприклад механізму переміщення подушок робочих валків попередньої кліті по осі, а також регулятор положення натяжного пристрою, що діє на головний привід однієї з клітей, оснащений датчиком швидкості, причому вхід регулятора положення підключений до датчика положення, і блок логічного керування, до виходу якого підключені керуючі входи блока натягу смуги і регулятора положення, який відрізняється тим, що він оснащений двома частотними компенсаторами биття валків, кожний з яких підключений першим входом до датчика положення, другим входом підключений до виходу блока логічного керування, а третім входом підключений до датчика швидкості головного приводу відповідної кліті, і суматором, розміщеним на виході регулятора положення, до додаткових входів якого підключені виходи частотних компенсаторів.
2. Пристрій по пункту 1, який відрізняється тим, що кожний частотний компенсатор містить вхідний ключ, лінійний фільтр, диференціатор, генератор пилкоподібного періодичного сигналу, синусний і косинусний перетворювачі, чотири множники, два інтегратори, два керованих індивідуальних обмежники, геометричний суматор, граничний елемент, вихідний суматор, причому нормально розімкнутий вхідний ключ знаходиться на першому вході компенсатора, керуючий вхід ключа є другим входом компенсатора, перший вхід диференціатора і вхід фільтра підключені до виходу ключа, інверсний другий вхід диференціатора підключений до виходу фільтра, вихід диференціатора підключений до перших входів першого і другого множників, вхід генератора є третім входом компенсатора, вихід генератора підключений до входів перетворювачів, вихід синусного перетворювача підключений до других входів парних множників, вихід косинусного перетворювача підключений до других входів непарних множників, виходи першого і другого множників підключені до входів відповідних інтеграторів, виходи яких підключені до перших входів відповідних обмежників і до відповідних входів геометричного суматора, вихід якого підключений до входу граничного елемента, два виходи якого підключені до других входів відповідних обмежників, вихід першого обмежника підключений до першого входу третього множника, вихід другого обмежника підключений до першого входу четвертого множника, а виходи третього і четвертого множників підключені відповідно до першого і другого входів вихідного суматора.
Текст
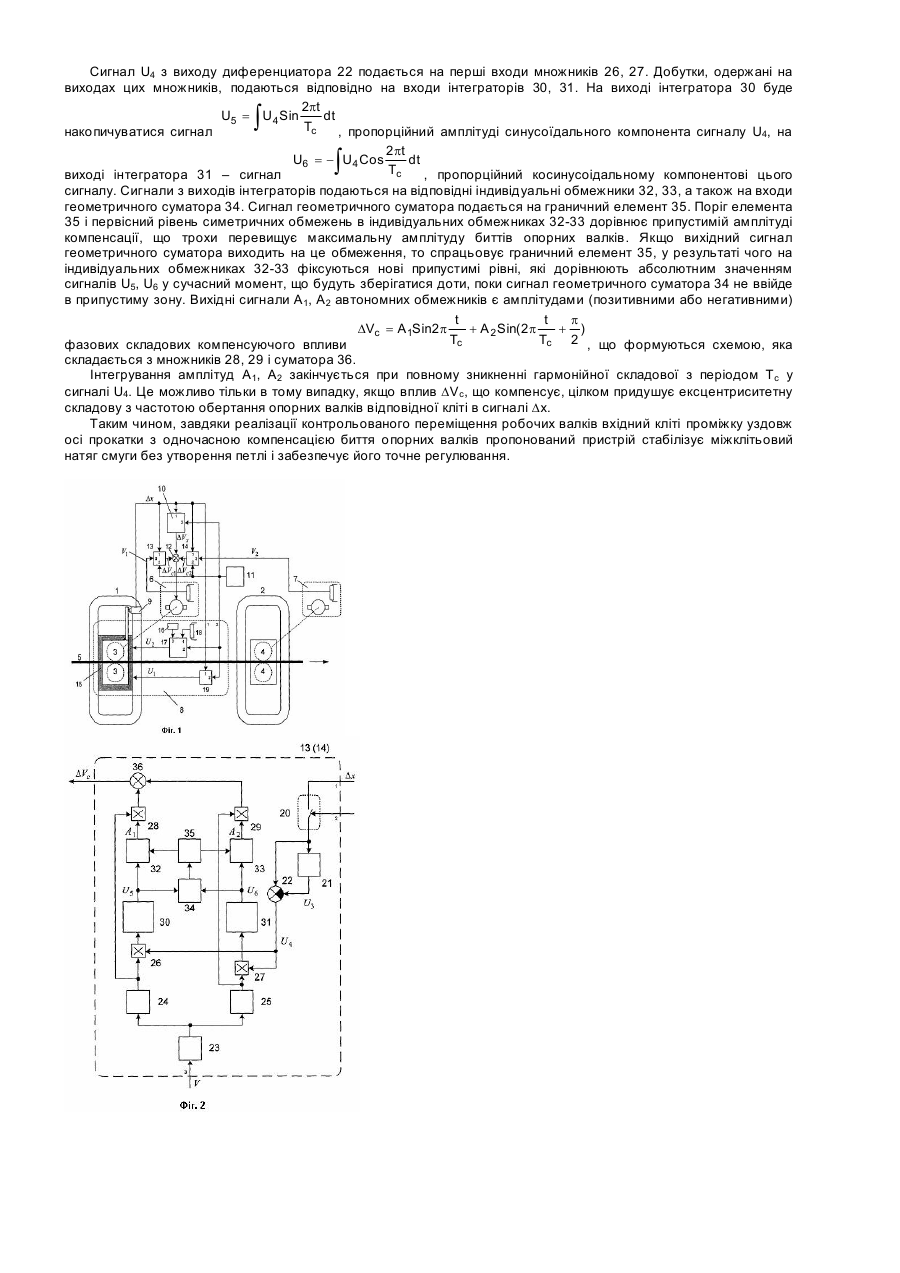
Передбачуваний винахід відноситься до прокатного виробництва і призначений для використання при безперервній гарячій прокатці смуги, переважно в першому міжклітьовому проміжку безперервної групи. Відомий пристрій регулювання міжклітьового натягу смуги [патент Росії №2147951, МПК7 B21B37/52, Система автоматического регулирования межклітевого натяжения полосы, Опубл.2000.04.27], що включає блок натягу з датчиком положення, регулятор положення, що діє на головний привод однієї з клітей, блок логічного керування, до виходу якого підключені керуючі входи блоку натягу смуги і регулятора. Основу блоку натягу складає рухливий петлетримач з роликом, що упирається в смугу, що рухається. Рухливий петлетримач має силову характеристику, яка забезпечує заданий натяг смуги незалежно від висоти петлі. У силу конструктивних обмежень петлетримач може бути ефективним тільки у вузькому діапазоні зміни висоти петлі. Для забезпечення роботи петлетримача в заданому діапазоні застосований контур регулювання, що включає вимірник висоти петлі, регулятор висоти петлі і головний привод однієї з двох клітей проміжку. Регулювання здійснюється так. При відхиленні різниці швидкостей суміжних клітей від заданого значення змінюється висота петлі, і відповідний сигнал від вимірника висоти петлі надходить на головний привод однієї з клітей через контур регулювання. Це приводить до зміни швидкості однієї з клітей і відновленню висоти петлі до колишнього стану. Даний пристрій забезпечує достатню точність регулювання натягу. Однак, воно непрацездатне при товщині смуги в проміжку більш 16мм (що характерно, наприклад, для перших пропусків на стані Стеккеля), коли велика жорсткість щодо згинання смуги не дозволяє утворити силову петлю за допомогою петлетримача. Крім того, на практиці встановлено, що цей пристрій не в змозі компенсувати коливання натягу, обумовлені биттям опорних валків прокатних клітей. Як прототип обраний пристрій регулювання міжклітьового натягу смуги при гарячій прокатці за заявкою на [винахід №20040403086 від 26.04.04.], що включає попередню і наступну прокатні кліті з встановленими в станинах робочими валками і подушками, блок натягу смуги з датчиком положення, а також регулятор положення, що діє на головний привод однієї з клітей, блок логічного керування, до виходу якого підключені керуючі входи блоку натягу і регулятора положення. Блок натягу виконаний у виді блоку переміщення робочих валків по осі стану, установленого, наприклад, на попередній кліті проміжку і постаченого блоком керування натягом, задатчиком натягу і блоком установки, причому перший вхід блоку переміщення підключений до виходу блоку керування натягом, перший вхід якого підключений до задатчика натягу, другий вхід, об'єднаний з однойменним входом блоку установки, підключений до виходу блоку логічного керування, перший вхід блоку установки підключений до датчика положення, а його вихід підключений до другого входу блоку переміщення. При русі робочих валків від міжклітьового проміжку натяг смуги росте, при зворотному русі він зменшується. Таким чином, керуючи лінійним переміщенням валків, завжди можна забезпечити деяке стійке положення, при якому фактичний натяг стане дорівнювати заданому. Розглянутий пристрій забезпечує регулювання міжклітьового натягу смуги при прокатці смуги, що має як малу, так і велику жорсткість щодо згинання смуги. Однак, недоліком такого пристрою регулювання є те, що, як і в аналогу, цей пристрій не в змозі компенсувати коливання натягу, обумовлені биттям опорних валків прокатних клітей. В основу винаходу поставлена задача підвищення точності регулювання міжклітьового натягу смуги завдяки придушенню регулярних високочастотних збурювань по натягу, внесених биттям опорних валків. Ця задача вирішується за рахунок технічного результату, що полягає в компенсації цих биттів випереджуючою протифазною зміною швидкості робочих валків. Для досягнення вищевказаного результату в пристрої регулювання міжклітьового натягу смуги при гарячій прокатці, що включає попередню і наступну прокатні кліті з встановленими в станинах робочими валками і подушками, блок натягу смуги з датчиком положення натяжного пристрою, наприклад, механізму переміщення подушок робочих валків попередньої кліті по осі, а також регулятор положення натяжного пристрою, що діє на головний привод однієї з клітей, постачений датчиком швидкості, вхід якого підключений до датчика положення, і блок логічного керування, до виходу якого підключені керуючі входи блоку натягу і регулятора положення, відповідно до винаходу, він постачений двома частотними компенсаторами биття валків, кожний з яких підключений першим входом до датчика положення, а другим входом підключений до датчика швидкості головного привода відповідної кліті, і суматором, розміщеним на виході регулятора положення, до додаткових входів якого підключені виходи частотних компенсаторів. При цьому частотний компенсатор містить вхідний ключ, лінійний фільтр, диференциатор, генератор пилкоподібного періодичного сигналу, синусний і косинусний перетворювачі, чотири множника, два інтегратори, два керованих індивідуальних обмежники, геометричний суматор, граничний елемент, вихідний суматор, причому нормально розімкнутий вхідний ключ знаходиться на першому вході компенсатора, керуючий вхід ключа є другим входом компенсатора, перший вхід диференциатора і вхід фільтра підключені до виходу ключа, інверсний другий вхід диференциатора підключений до виходу фільтра, вихід диференциатора підключений до перших входів першого і другого множників, вхід генератора є третім входом компенсатора, вихід генератора підключений до входів перетворювачів, вихід синусного перетворювача підключений до других входів парних множників, вихід косинусного перетворювача підключений до других входів непарних множників, виходи першого і другого множника підключені до входів відповідних інтеграторів, виходи яких підключені до перших входів відповідних обмежників і до відповідних входів геометричного суматора, вихід якого підключений до входу граничного елемента, два виходи якого підключені до других входів відповідних обмежників, вихід першого обмежника підключений до першого входу третього множника, вихід другого обмежника підключений до першого входу четвертого множника, а виходи третього і четвертого множників підключені відповідно до першого і другому входам вихідного суматора. Сутність винаходу полягає в наступному. Регулювання натягу смуги в проміжку здійснюється шляхом переміщення робочих валків однієї з клітей уздовж осі прокатки. При русі робочих валків першої кліті проти напрямку прокатки натяг смуги росте, при зворотному русі він зменшується. Таким чином, лінійне переміщення валків по осі прокатки завжди приводить до деякого стійкого положення, при якому фактичний натяг стане дорівнюватися заданому. Переміщення валків може привести до того, що при рівності поточного натягу заданому робочі валки змістяться щодо осьової площини кліті. Це означає, що вільна довжина lсв смуги в міжклітьовому проміжку не дорівнює різниці між відстанню lпром між осями клітей і пружним подовженням Dl натягнутої смуги, (1) lсв¹ lпром-Dl. Приведення вільної довжини lсв смуги до необхідної умови (2) lсв= lпром-Dl здійснюють додатковою неузгодженістю по клітям частот обертання робочих валків, для чого передбачений непрямий регулятор положення валків регулюючої кліті (положення блоку натягу смуги), що діє на один з головних приводів. Велика маса робочих валків (10 і більш тонн) не дозволяє ефективно придушувати регулярні відносно високочастотні збурювання по натягу, внесені биттям опорних валків, за допомогою самого блоку силового впливу і регулятора його положення. Ці збурювання можна компенсувати тільки випереджуючи протифазною зміною швидкості робочих валків регулюючої кліті. Для цього в пристрої використовують два адаптивних компенсатори биттів (по числу клітей, що примикають), які генерують синусоїдальні впливи на регулюючий головний привод з частотами, обумовленими заданими швидкостями обертання робочих валків. У результаті порівняльного аналізу пропонованого пристрою регулювання міжклітьового натягу смуги при гарячій прокатці з прототипом установлено, що вони мають наступні загальні ознаки: - попередню і наступну прокатні кліті з встановленими в станинах робочими валками і подушками; - блок натягу смуги з датчиком положення натяжного пристрою; - регулятор положення натяжного пристрою, що діє на головний привод однієї з клітей, постачений датчиком швидкості; - вхід регулятора положення натяжного пристрою підключений до датчика положення; - блок логічного керування, до виходу якого підключені керуючі входи блоку натягу і регулятора положення, а також відмінні ознаки: - два частотних компенсатори биття валків, кожний з яких підключений першим входом до датчика положення, а другим входом підключений до датчика швидкості головного привода відповідної кліті; - суматор, розміщений навиході регулятора положення, до додаткових входів якого підключені виходи частотних компенсаторів; - частотний компенсатор містить вхідний ключ, лінійний фільтр, диференциатор, генератор пилкоподібного періодичного сигналу, синусний і косинусний перетворювачі, чотири множника, два інтегратори, два керованих індивідуальних обмежники, геометричний суматор, граничний елемент, вихідний суматор зі схемою підключення всіх елементів. Таким чином, запропонований пристрій регулювання міжклітьового натягу смуги при гарячій прокатці має нові елементи пристрою і нову форму виконання цих елементів, нові зв'язки між ними. Між відмінними ознаками і досягнутим технічним результатом існує причинно-наслідковий зв'язок. Завдяки постачанню пристрою двома частотними компенсаторами биття валків і підключенню його елементів до системи регулювання натягу смуги стала можливою компенсація цих биттів випереджуючою протифазною зміною швидкості робочих валків. У результаті усунення регулярних високочастотних збурювань по натягу, внесених биттям опорних валків, була досягнута стабілізація натягу смуги при прокатці. Усе вищесказане забезпечує досягнення поставленої задачі - підвищення точності регулювання міжклітьового натягу смуги. Виключення з вищевказаної сукупності відмінних ознак хоча б одного, не забезпечує досягнення технічного результату. Технічне рішення, що заявляється, промислове застосовно, тому що його технічне і технологічне виконання не представляє труднощів. По цьому рішенню виконаний технічний проект стану Стеккеля 1500 для Новолипецького меткомбінату. Таким чином технічному рішенню, що заявляється, може бути надана правова охорона, тому що воно є новим, має винахідницький рівень і промислове застосовно, тобто відповідає критеріям винаходу. Технічне рішення, що заявляється, пояснюється кресленнями, на яких зображено: Фіг.1 - пристрій регулювання натягу смуги в міжклітьовому проміжку при гарячій прокатці з блоком натягу смуги; Фіг.2 - компенсатор биттів валків. Міжклітьовий проміжок утворюється клітями 1-2 кварто з робочими валками 3-4, що прокочують смугу 5, які встановлені в подушках. Валки 3 на першій, вхідній кліті, можуть переміщатися у вікнах станин по горизонталі в заданих межах, наприклад, ±12мм. Робочі валки прокатних клітей оснащені головними приводами 6-7 відповідно. У даному прикладі пристрій цілком прив'язаний до вхідної кліті проміжку. Пристрій містить у собі блок 8 натягу смуги, датчик 9 положення робочих валків щодо осьової площини кліті (він же - датчик положення натяжного пристрою), регулятор 10 положення робочих валків і блок 11 логічного керування, а також суматор 12 і два компенсатори 13, 14 биттів опорних валків. Вихід датчика 9 підключений до перших входів блоку 8, регулятора 10 і компенсаторів 13, 14. Виходи регулятора і компенсаторів підключені до відповідних входів суматора 12, вихід якого підключений у даному випадку до регулюючого входу головного привода 6 першої кліті. Вихід блоку 11 логічного керування підключений до других входів блоку 8, регулятора 10 і компенсаторів 13, 14. Треті входи зазначених компенсаторів підключені відповідно до задатчиків швидкості головного привода 6 вхідної кліті і головного привода 7 вихідної кліті проміжку. Блок 8 натягу смуги містить у собі блок 15 переміщення робочих валків попередньої кліті по осі (натяжний пристрій), вимірник 16 переднього натягу кліті, блок 17 керування натягом, задатчик 18 натягу і блок 19 установки. Перший вхід блоку 15 підключений до виходу блоку 19, другий вхід підключений до виходу блоку 17. Перший вхід блоку 17 підключений до задатчика 18, другий вхід, об'єднаний із другим входом блоку 19, є другим входом блоку 8, а третій вхід підключений до вимірника 16. Перший вхід блоку 19 установки є першим входом блоку натягу смуги. Компенсатор 13 (14), показаний на Фіг.2, містить вхідний ключ 20, лінійний фільтр 21, диференциатор 22, генератор 23 пилкоподібного періодичного сигналу, синусний 24 і косинусний 25 перетворювачі, чотири множника 26-29, інтегратори 30-31, керовані індивідуальні обмежники 32-33, геометричний суматор 34 , граничний елемент 35, вихідний суматор 36. Нормально розімкнутий вхідний ключ 20 знаходиться на першому вході компенсатора, керуючий вхід ключа є другим входом компенсатора. Перший вхід диференциатора 22 і вхід фільтра 21 підключені до виходу ключа 20, інверсний другий вхід диференциатора підключений до виходу фільтра, а вихід диференциатора підключений до перших входів першого 26 і другого 27 множників. Вхід генератора 23 є третім входом компенсатора. Вихід генератора підключений до входів перетворювачів 24, 25. Вихід синусного перетворювача 24 підключений до других входів парних множників 26, 28. Вихід косинусного перетворювача 25 підключений до других входів непарних множників 27, 29. Виходи першого (26) і другого (27) множника підключені до входів відповідних інтеграторів 30, 31, виходи яких підключені до перших входів відповідних обмежників 32, 33 і до відповідних входів геометричного суматора 34, вихід якого підключений до входу граничного елемента 35, два виходи якого підключені до других входів обмежників 32, 33 відповідно. Вихід першого обмежника 32 підключений до першого входу третього множника 28, вихід другого обмежника 33 підключений до першого входу четвертого множника 29, а виходи зазначених множників підключені відповідно до першого і другого входів вихідного суматора 36. Пристрій працює так. Перед початком прокатки блок 11 логічного керування, що фіксує наявність металу в обох клітях, знаходиться у вихідному стані. При цьому регулятор 10 положення натяжного пристрою і блок 17 керування натягом виключені, а блок 19 установки включений. Горизонтальне положення робочих валків 3 щодо осьової площини кліті контролюється датчиком 9 положення. Якщо робочі валки знаходяться не в осьовій площині кліті, на виході датчика положення з'явиться сигнал неузгодженості Dх, прийнятий у даний момент тільки блоком 19 установки. До входу смуги в другу кліть блок 19 забезпечує горизонтальне положення робочих валків на осьовій площині кліті, подаючи на другий вхід блоку 15 переміщення робочих валків коригувальний сигнал (який має розмірність в одиницях тиску) ò U1 = K1Dx + K 2 Dxdt (3) де К1, К2 - коефіцієнти підсилення. Позитивний сигнал U1 , збільшує тиск в активних циліндрах блоку 15 переміщення робочих валків, і валки переміщаються убік від проміжку. Негативний сигнал переміщує робочі валки убік проміжку. Після входу смуги в другу кліть проміжку з'явиться натяг T смуги. Блок 11 сформує логічний сигнал керування, який попадає на другі входи натяжного пристрою 8, регулятора 10 і компенсаторів 13, 14. При цьому “заморожується” сигнал U1 на виході блоку 19, включаються регулятор 10, компенсатори 13, 14 і блок 17 керування натягом. Блок 17 формує сигнал (який також має розмірність в одиницях тиску). Tзад U2 = + К 3 ( Tзад - Т)dt (4) Fц , де Тзад, - заданий натяг від задатчика 18; Fц - площа активних циліндрів блоку 15 переміщення робочих валків; Т - фактичний натяг, що знімається з виходу датчика 16; К3 - коефіцієнт. Позитивний сигнал U2 збільшує тиск в активних циліндрах блоку переміщення, що приводить до збільшення натягу смуги. Негативний сигнал зменшує натяг смуги. При наявності неузгодженості DT=Tзад-Т почнеться горизонтальне переміщення робочих валків 3 до силової рівноваги, у результаті чого фактичний натяг смуги дорівняється заданому значенню. Зсув валків Dх, що з'являється при цьому, поступово усувається регулятором 10, що формує сигнал ò ò DVx = Dxdt (5) , який подається через суматор 12 на вхід головного привода 6. На другий і третій входи суматора подають сигнали, що компенсують, DVc1, DVc2 від компенсаторів 13, 14 биттів валків. Індекси 1, 2 позначають номера клітей проміжку. На вхід головного привода 6 надходить сума сигналів (6) DV=DVx+DVc1+DVc2. Компенсатори 13, 14 биття опорних валків працюють таким чином. На перші входи компенсаторів надходить сигнал Dх від датчика 9 переміщення блоку силового впливу. На другі входи подається керуючий сигнал від блоку 11 логічного керування. На третій вхід кожного компенсатора надходить сигнал заданої швидкості V від головного привода відповідної кліті. Сигнал з виходу компенсатора 13 (14) подається на відповідний вхід суматора 12 і далі на вхід головного привода 6 регулюючої кліті. Компенсатор 13 (14) формує адаптивну періодичну складову DVc швидкості, що придушує биття опорних валків відповідної кліті за критерієм мінімуму складової з частотою їхнього обертання в сигналі Dх. При наявності металу в обох клітях ключ 20 замикається. Вхідний сигнал Dх надходить через ключ 20 на вхід схеми, що складається з фільтра 21 і диференциатора 22. Схема виділяє “високочастотний” сигнал U4=Dх-U3, обумовлений, головним чином, биттями опорних валків на обох клітях. Сигнал U3 - це вихідний сигнал фільтра 21. Сигнал V лінійної швидкості обертання валків відповідної кліті надходить на вхід генератора 23. Генератор формує пилкоподібний періодичний сигнал з амплітудою 2p- і циклом Тc=pDo/V, де Do - діаметр опорного валка. p 2 . На виході На базі цього сигналу перетворювачі 24, 25 формують синусоїди з фазовою розбіжністю 2 pt 2pt p 2 pt Sin Sin( + ) = Cos Tc , на виходіперетворювача 25 Tc 2 Tc , перетворювача 24 маємо, наприклад, синусоїду де перемінна t - поточний час. Перша синусоїда подається на другі входи парних множників 26, 28. Друга p синусоїда (зрушена на кут 2 ) подається на другі входи непарних множників 27, 29. Сигнал U4 з виходу диференциатора 22 подається на перші входи множників 26, 27. Добутки, одержані на виходах цих множників, подаються відповідно на входи інтеграторів 30, 31. На виході інтегратора 30 буде 2pt U5 = U4 Sin dt Tc , пропорційний амплітуді синусоїдального компонента сигналу U4, на накопичуватися сигнал ò 2 pt dt Tc виході інтегратора 31 – сигнал , пропорційний косинусоідальному компонентові цього сигналу. Сигнали з виходів інтеграторів подаються на відповідні індивідуальні обмежники 32, 33, а також на входи геометричного суматора 34. Сигнал геометричного суматора подається на граничний елемент 35. Поріг елемента 35 і первісний рівень симетричних обмежень в індивідуальних обмежниках 32-33 дорівнює припустимій амплітуді компенсації, що трохи перевищує максимальну амплітуду биттів опорних валків. Якщо вихідний сигнал геометричного суматора виходить на це обмеження, то спрацьовує граничний елемент 35, у результаті чого на індивідуальних обмежниках 32-33 фіксуються нові припустимі рівні, які дорівнюють абсолютним значенням сигналів U5, U6 у сучасний момент, що будуть зберігатися доти, поки сигнал геометричного суматора 34 не ввійде в припустиму зону. Вихідні сигнали A1, A2 автономних обмежників є амплітудами (позитивними або негативними) p t t DVc = A1Sin2 p + A 2 Sin( 2 p + ) Tc Tc 2 , що формуються схемою, яка фазових складових компенсуючого впливи складається з множників 28, 29 і суматора 36. Інтегрування амплітуд A1, A2 закінчується при повному зникненні гармонійної складової з періодом Tc у сигналі U4. Це можливо тільки в тому випадку, якщо вплив DVc, що компенсує, цілком придушує ексцентриситетну складову з частотою обертання опорних валків відповідної кліті в сигналі Dх. Таким чином, завдяки реалізації контрольованого переміщення робочих валків вхідний кліті проміжку уздовж осі прокатки з одночасною компенсацією биття опорних валків пропонований пристрій стабілізує міжклітьовий натяг смуги без утворення петлі і забезпечує його точне регулювання. ò U6 = - U4 Cos
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for adjustment of interstand tension of strip at hot rolling
Автори англійськоюStech Volodymyr Stanislavovych, Barabash Andrii Volodymyrovych, Yeletskykh Volodymyr Ivanovych, Kaporovych Svitlana Eduardivna
Назва патенту російськоюУстройство регулирования межклетьевого натяга полосы при горячей прокатке
Автори російськоюСтеч Владимир Станиславович, Барабаш Андрей Владимирович, Елецких Владимир Иванович, Капорович Светлана Эдуардовна
МПК / Мітки
МПК: B21B 37/48
Мітки: смуги, натягу, прокатці, регулювання, пристрій, гарячій, міжклітьового
Код посилання
<a href="https://ua.patents.su/4-78756-pristrijj-regulyuvannya-mizhklitovogo-natyagu-smugi-pri-garyachijj-prokatci.html" target="_blank" rel="follow" title="База патентів України">Пристрій регулювання міжклітьового натягу смуги при гарячій прокатці</a>
Спосіб регулювання міжклітьового натягу смуги при гарячій прокатці і пристрій для його реалізації
Номер патенту: 75964
Опубліковано: 15.06.2006
Автори: Гагарін Павло Павлович, Леонідов-Каневський Євген Володимирович, Барабаш Андрій Володимирович, Капорович Світлана Едуардівна, Єлецьких Володимир Іванович, Стеч Володимир Станіславович
МПК: B21B 37/48
Мітки: смуги, реалізації, прокатці, спосіб, натягу, пристрій, міжклітьового, гарячій, регулювання
Формула / Реферат:
1. Спосіб регулювання міжклітьового натягу смуги при гарячій прокатці, який включає надання смузі пружного розтягання за допомогою неузгодження швидкостей обертання робочих валків суміжних клітей і підтримку сталості натягу завдяки примусовій зміні довжини смуги в міжклітьовому проміжку, який відрізняється тим, що зміну довжини смуги здійснюють зсувом робочих валків однієї із суміжних клітей, наприклад, вхідної кліті уздовж осі...
Пристрій для регулювання натягу матеріалу при змотуванні в рулон
Номер патенту: 70226
Опубліковано: 15.09.2004
Автори: Кострицький Валерій Всеволодович, Островерхов Микола Якович, Теряєв Віталій Іванович, Кириченко Юрій Олексійович
МПК: B65H 77/00
Мітки: рулон, матеріалу, змотуванні, натягу, регулювання, пристрій
Формула / Реферат:
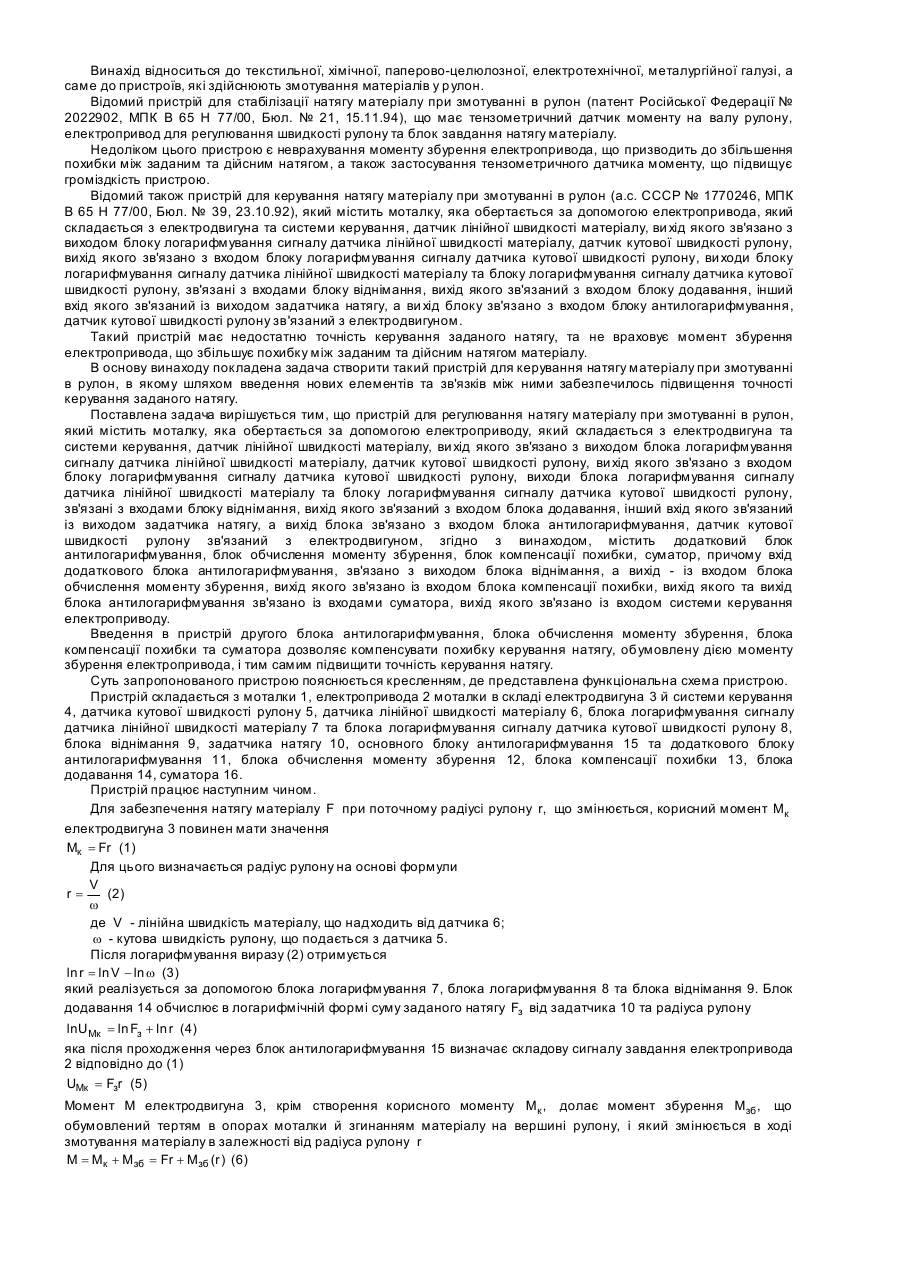
Пристрій для регулювання натягу матеріалу при змотуванні в рулон, який містить моталку, яка обертається за допомогою електроприводу, який складається з електродвигуна та системи керування, датчик лінійної швидкості матеріалу, вихід якого зв'язаний з виходом блока логарифмування сигналу датчика лінійної швидкості матеріалу, датчик кутової швидкості рулона, вихід якого зв'язано з входом блока логарифмування сигналу датчика кутової швидкості...
Пристрій для регулювання натягу матеріалу при змотуванні в рулон
Номер патенту: 70861
Опубліковано: 15.10.2004
Автори: Теряєв Віталій Іванович, Кострицький Валерій Всеволодович, Островерхов Микола Якович, Кириченко Юрій Олексійович
МПК: B65H 77/00
Мітки: натягу, рулон, пристрій, змотуванні, матеріалу, регулювання
Формула / Реферат:
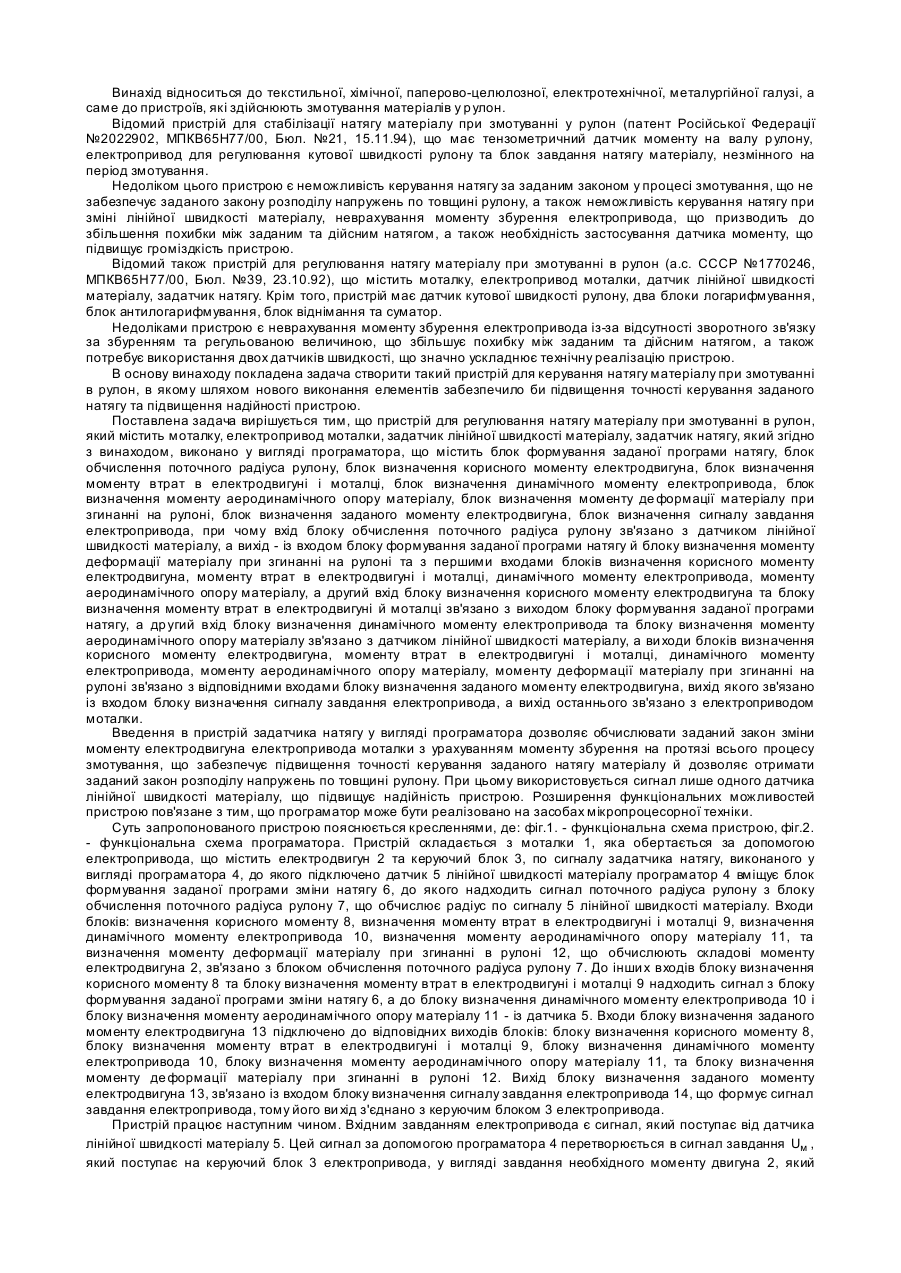
Пристрій для регулювання натягу матеріалу при змотуванні в рулон, який містить моталку, електропривід моталки, датчик лінійної швидкості матеріалу, задатчик натягу, який відрізняється тим, що задатчик натягу виконано у вигляді програматора, який містить блок формування заданої програми натягу, блок обчислення поточного радіуса рулону, блок визначення корисного моменту електродвигуна, блок визначення моменту втрат в електродвигуні і моталці,...
Пристрій регулювання натягу ременя
Номер патенту: 73758
Опубліковано: 15.09.2005
Автор: Колдун Віктор Петрович
МПК: A44B 11/00
Мітки: натягу, пристрій, ременя, регулювання
Формула / Реферат:
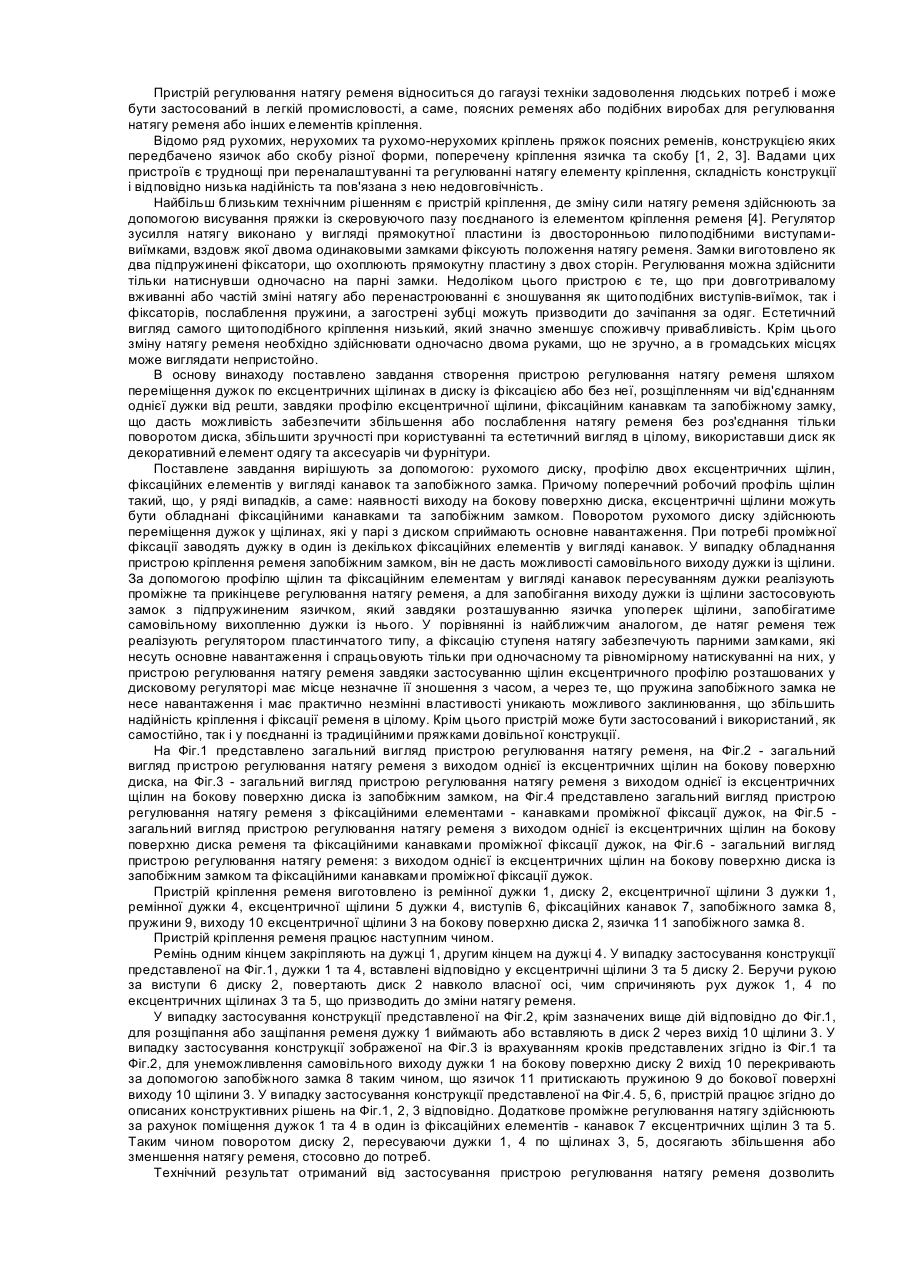
1. Пристрій регулювання натягу ременя, який містить дві ремінні дужки, замок, регулятор натягу, фіксаційні елементи, який відрізняється тим, що регулятор натягу ременя виготовлено у вигляді рухомого диска з ексцентричними щілинами та вставленими у них дужками, які шляхом повороту рухомого диска мають можливість зміщуватися відносно центра рухомого диска і таким чином здійснювати натяг або послаблення ременя.2. Пристрій регулювання...
Спосіб регулювання натягу на моталці дрібносортного стану
Номер патенту: 63426
Опубліковано: 15.01.2004
Автори: Скляр Олександр Всеволодович, Кекух Анатолій Володимирович, Шеремет Володимир Олександрович, Куваєв Володимир Миколайович, Бабенко Михайло Антонович, Чигринський Володимир Олександрович, Карпинський Юрій Пантелеймонович, Політов Ігор Віталійович, Щур Віталій Андрійович, Козуненко Анатолій Григорович
МПК: B21C 47/00
Мітки: спосіб, регулювання, стану, моталці, дрібносортного, натягу
Формула / Реферат:
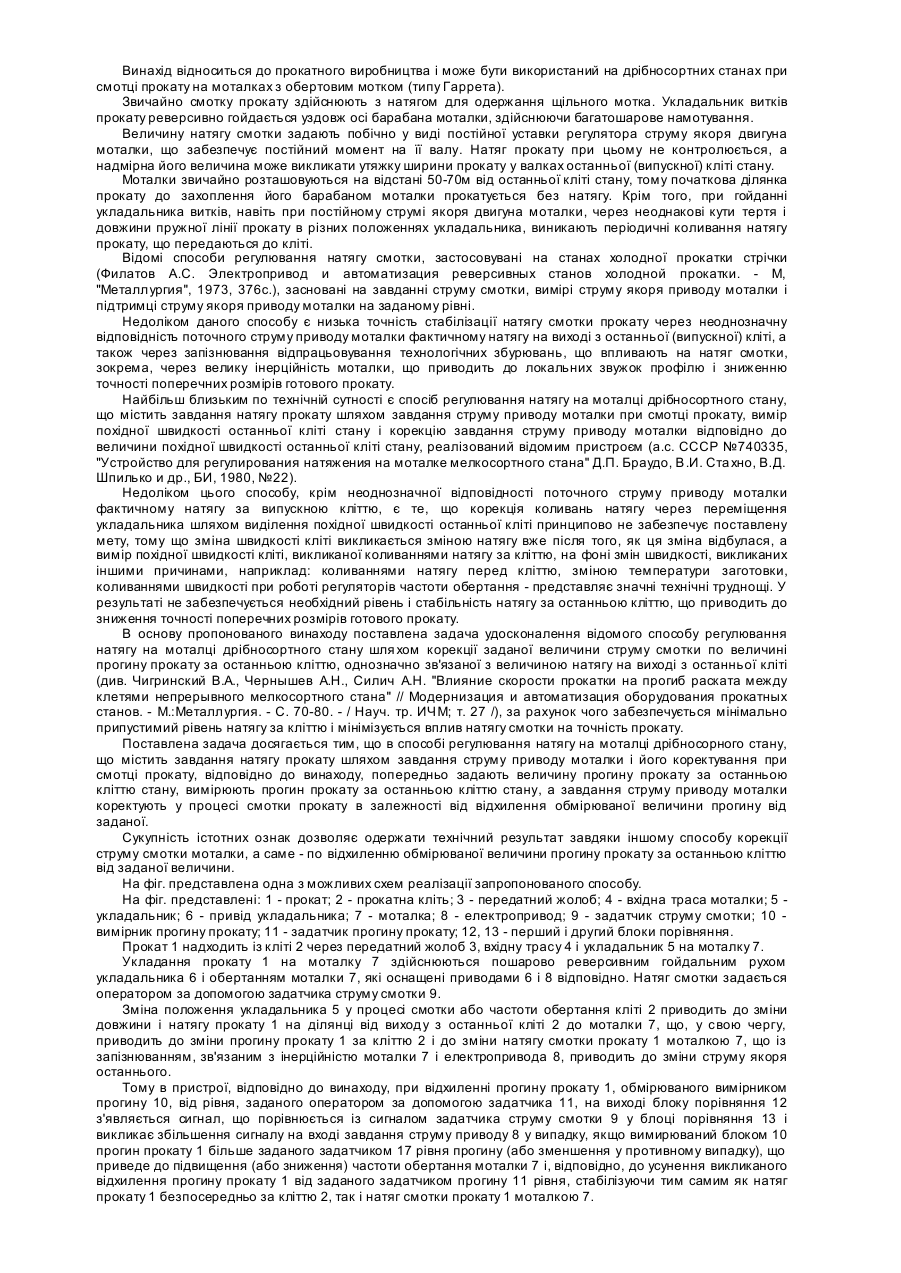
Спосіб регулювання натягу на моталці дрібносортного стану, за яким задають натяг прокату шляхом задавання струму приводу моталки і його коректування при змотуванні прокату, який відрізняється тим, що попередньо задають величину прогину прокату за останньою кліттю стану, вимірюють прогин прокату за останньою кліттю стану, а задавання струму приводу моталки коректують у процесі змотування прокату залежно від відхилення вимірюваної величини його...
Попередній патент: Спосіб визначення пластометричних показників вугілля за вдосконаленим методом л.м. сапожнікова та л.п. базилевич
Наступний патент: Спосіб виготовлення нановолокон нітриду кремнію
Випадковий патент: Пристрій для кріплення рейки до шпали