Система аналізу траєкторії польоту літального апарата
Номер патенту: 79324
Опубліковано: 25.04.2013
Автори: Кулік Анатолій Степанович, Мироненко Дмитро Ігорович, Дергачов Констянтин Юрійович
Формула / Реферат
Система аналізу траєкторії польоту літального апарата, яка містить приймач, зв'язаний із глобальною супутниковою системою та керуючим контролером, джерело живлення, вихід якого послідовно через підсистему стабілізації живлення та пристрій індикації з персональним комп'ютером з'єднаний з центральною станцією, вбудовані акумулятори, входи і виходи яких з'єднані з підсистемою стабілізації живлення, керуючий контролер, входи і виходи якого з'єднані з оперативною пам'яттю, пристроєм стабілізації живлення, енергонезалежним зберігачем інформації, бездротовий передавач інформації, вхід якого зв'язаний з керуючим контролером та енергонезалежним зберігачем інформації, а вихід приєднаний до пристрою індикації, яка відрізняється тим, що в неї введені датчик кутової швидкості, гіронапівкомпас, висотомір, варіометр, авіагоризонт, радіопівкомпас, виходи яких з'єднані з керуючим контролером.
Текст
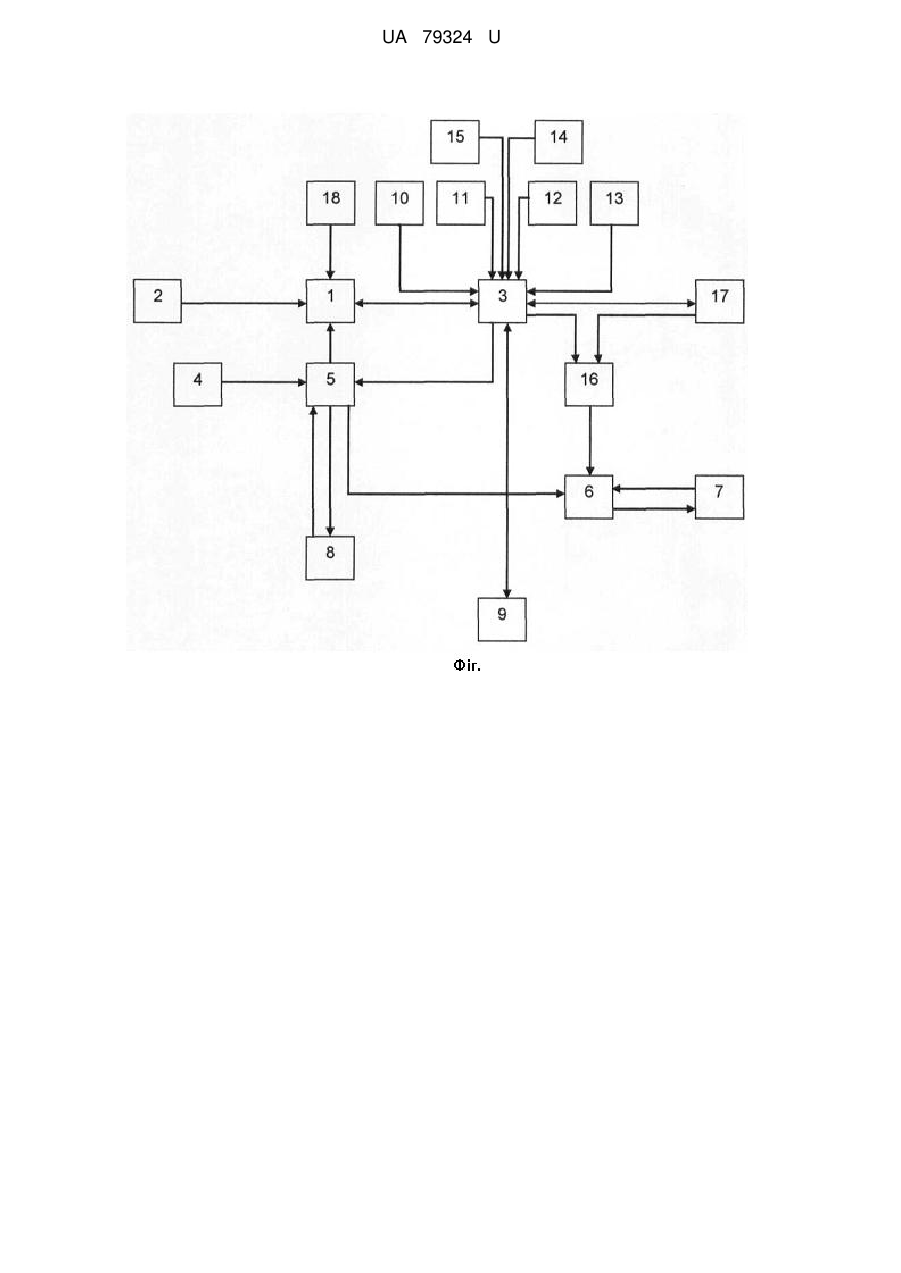
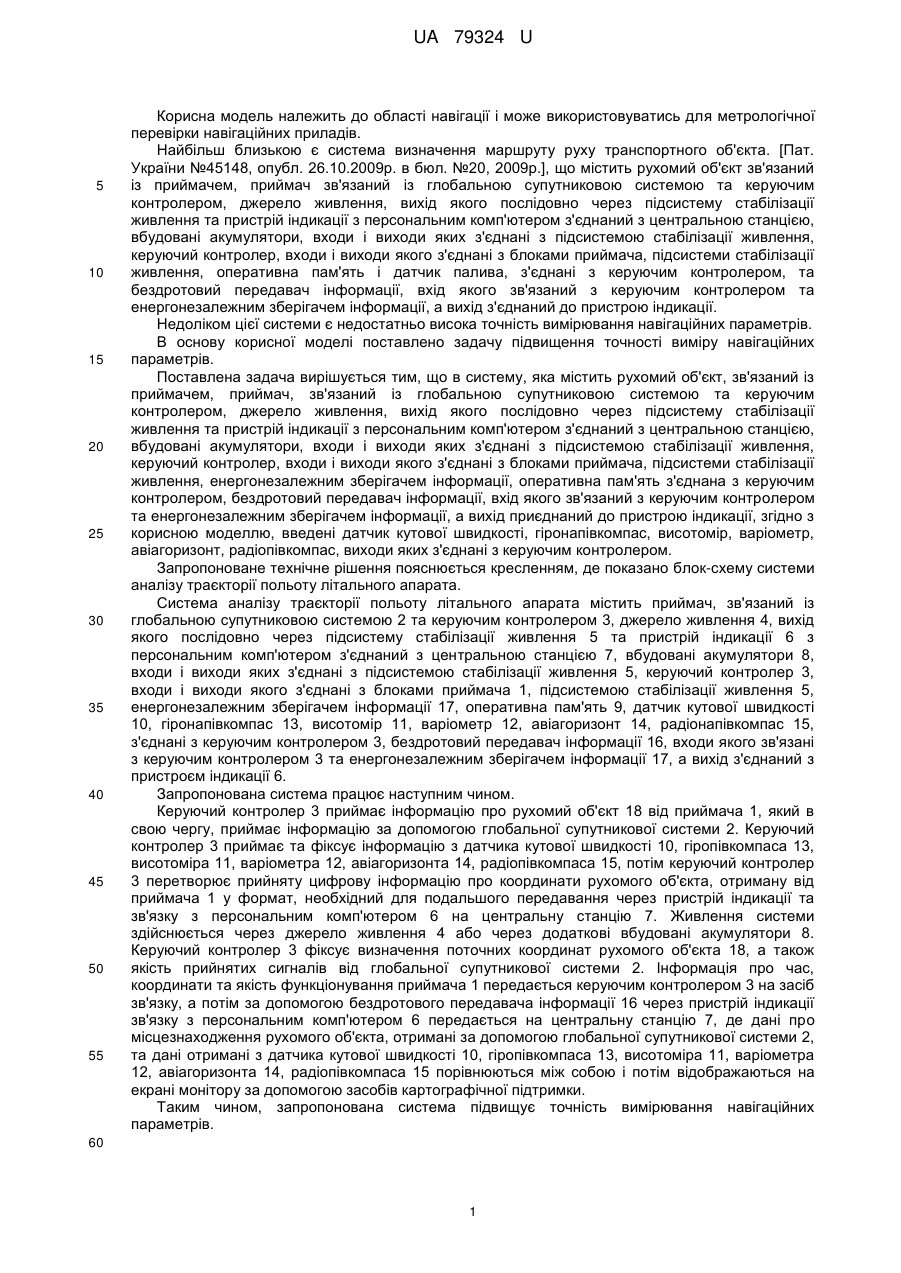
Реферат: UA 79324 U UA 79324 U 5 10 15 20 25 30 35 40 45 50 55 Корисна модель належить до області навігації і може використовуватись для метрологічної перевірки навігаційних приладів. Найбільш близькою є система визначення маршруту руху транспортного об'єкта. [Пат. України №45148, опубл. 26.10.2009р. в бюл. №20, 2009р.], що містить рухомий об'єкт зв'язаний із приймачем, приймач зв'язаний із глобальною супутниковою системою та керуючим контролером, джерело живлення, вихід якого послідовно через підсистему стабілізації живлення та пристрій індикації з персональним комп'ютером з'єднаний з центральною станцією, вбудовані акумулятори, входи і виходи яких з'єднані з підсистемою стабілізації живлення, керуючий контролер, входи і виходи якого з'єднані з блоками приймача, підсистеми стабілізації живлення, оперативна пам'ять і датчик палива, з'єднані з керуючим контролером, та бездротовий передавач інформації, вхід якого зв'язаний з керуючим контролером та енергонезалежним зберігачем інформації, а вихід з'єднаний до пристрою індикації. Недоліком цієї системи є недостатньо висока точність вимірювання навігаційних параметрів. В основу корисної моделі поставлено задачу підвищення точності виміру навігаційних параметрів. Поставлена задача вирішується тим, що в систему, яка містить рухомий об'єкт, зв'язаний із приймачем, приймач, зв'язаний із глобальною супутниковою системою та керуючим контролером, джерело живлення, вихід якого послідовно через підсистему стабілізації живлення та пристрій індикації з персональним комп'ютером з'єднаний з центральною станцією, вбудовані акумулятори, входи і виходи яких з'єднані з підсистемою стабілізації живлення, керуючий контролер, входи і виходи якого з'єднані з блоками приймача, підсистеми стабілізації живлення, енергонезалежним зберігачем інформації, оперативна пам'ять з'єднана з керуючим контролером, бездротовий передавач інформації, вхід якого зв'язаний з керуючим контролером та енергонезалежним зберігачем інформації, а вихід приєднаний до пристрою індикації, згідно з корисною моделлю, введені датчик кутової швидкості, гіронапівкомпас, висотомір, варіометр, авіагоризонт, радіопівкомпас, виходи яких з'єднані з керуючим контролером. Запропоноване технічне рішення пояснюється кресленням, де показано блок-схему системи аналізу траєкторії польоту літального апарата. Система аналізу траєкторії польоту літального апарата містить приймач, зв'язаний із глобальною супутниковою системою 2 та керуючим контролером 3, джерело живлення 4, вихід якого послідовно через підсистему стабілізації живлення 5 та пристрій індикації 6 з персональним комп'ютером з'єднаний з центральною станцією 7, вбудовані акумулятори 8, входи і виходи яких з'єднані з підсистемою стабілізації живлення 5, керуючий контролер 3, входи і виходи якого з'єднані з блоками приймача 1, підсистемою стабілізації живлення 5, енергонезалежним зберігачем інформації 17, оперативна пам'ять 9, датчик кутової швидкості 10, гіронапівкомпас 13, висотомір 11, варіометр 12, авіагоризонт 14, радіонапівкомпас 15, з'єднані з керуючим контролером 3, бездротовий передавач інформації 16, входи якого зв'язані з керуючим контролером 3 та енергонезалежним зберігачем інформації 17, а вихід з'єднаний з пристроєм індикації 6. Запропонована система працює наступним чином. Керуючий контролер 3 приймає інформацію про рухомий об'єкт 18 від приймача 1, який в свою чергу, приймає інформацію за допомогою глобальної супутникової системи 2. Керуючий контролер 3 приймає та фіксує інформацію з датчика кутової швидкості 10, гіропівкомпаса 13, висотоміра 11, варіометра 12, авіагоризонта 14, радіопівкомпаса 15, потім керуючий контролер 3 перетворює прийняту цифрову інформацію про координати рухомого об'єкта, отриману від приймача 1 у формат, необхідний для подальшого передавання через пристрій індикації та зв'язку з персональним комп'ютером 6 на центральну станцію 7. Живлення системи здійснюється через джерело живлення 4 або через додаткові вбудовані акумулятори 8. Керуючий контролер 3 фіксує визначення поточних координат рухомого об'єкта 18, а також якість прийнятих сигналів від глобальної супутникової системи 2. Інформація про час, координати та якість функціонування приймача 1 передається керуючим контролером 3 на засіб зв'язку, а потім за допомогою бездротового передавача інформації 16 через пристрій індикації зв'язку з персональним комп'ютером 6 передається на центральну станцію 7, де дані про місцезнаходження рухомого об'єкта, отримані за допомогою глобальної супутникової системи 2, та дані отримані з датчика кутової швидкості 10, гіропівкомпаса 13, висотоміра 11, варіометра 12, авіагоризонта 14, радіопівкомпаса 15 порівнюються між собою і потім відображаються на екрані монітору за допомогою засобів картографічної підтримки. Таким чином, запропонована система підвищує точність вимірювання навігаційних параметрів. 60 1 UA 79324 U ФОРМУЛА КОРИСНОЇ МОДЕЛІ 5 10 Система аналізу траєкторії польоту літального апарата, яка містить приймач, зв'язаний із глобальною супутниковою системою та керуючим контролером, джерело живлення, вихід якого послідовно через підсистему стабілізації живлення та пристрій індикації з персональним комп'ютером з'єднаний з центральною станцією, вбудовані акумулятори, входи і виходи яких з'єднані з підсистемою стабілізації живлення, керуючий контролер, входи і виходи якого з'єднані з оперативною пам'яттю, пристроєм стабілізації живлення, енергонезалежним зберігачем інформації, бездротовий передавач інформації, вхід якого зв'язаний з керуючим контролером та енергонезалежним зберігачем інформації, а вихід приєднаний до пристрою індикації, яка відрізняється тим, що в неї введені датчик кутової швидкості, гіронапівкомпас, висотомір, варіометр, авіагоризонт, радіопівкомпас, виходи яких з'єднані з керуючим контролером. Комп’ютерна верстка А. Крижанівський Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 2
ДивитисяДодаткова інформація
Назва патенту англійськоюSystem for analysis of an aircraft flight trajectory
Автори англійськоюKulik Anatolii Stepanovych, Derhachov Kostiantyn Yuriiovych, Myronenko Dmytro Ihorovych
Назва патенту російськоюСистема анализа траектории полета летательного аппарата
Автори російськоюКулик Анатолий Степанович, Дергачев Констянтин Юрьевич, Мироненко Дмитрий Игоревич
МПК / Мітки
МПК: G01S 3/02
Мітки: літального, аналізу, траєкторії, апарата, польоту, система
Код посилання
<a href="https://ua.patents.su/4-79324-sistema-analizu-traehktori-polotu-litalnogo-aparata.html" target="_blank" rel="follow" title="База патентів України">Система аналізу траєкторії польоту літального апарата</a>
Система визначення маршруту руху транспортного об’єкта
Номер патенту: 45148
Опубліковано: 26.10.2009
Автори: Дергачев Костянтин Юрійович, Бандура Іван Миколайович, Дорош Ігор Сергійович
МПК: G01S 3/02
Мітки: транспортного, руху, визначення, маршруту, об'єкта, система
Формула / Реферат:
Система визначення маршруту руху транспортного об'єкта, яка містить приймач, зв'язаний із глобальною супутниковою системою та керуючим контролером, джерело живлення, вихід якого послідовно через підсистему стабілізації живлення та пристрій індикації з персональним комп'ютером з'єднаний з центральною станцією, вбудовані акумулятори, входи і виходи яких з'єднані з підсистемою стабілізації живлення, керуючий контролер, входи і виходи якого...
Система керування місцезнаходженням рухомого об’єкта
Номер патенту: 55409
Опубліковано: 10.12.2010
Автори: Кулік Анатолій Степанович, Дергачов Костянтин Юрійович, Гуш Роман Миколайович, Кописов Олег Едуардович
МПК: G08G 1/0968
Мітки: рухомого, об'єкта, місцезнаходженням, керування, система
Формула / Реферат:
Система керування місцезнаходженням рухомого об'єкта, що містить глобальну супутникову систему, перший вхід якої з'єднаний з виходом передавача, а перший вихід з'єднаний з приймачем, керуючий контролер, вхід якого з'єднаний з приймачем, а виходи з'єднані з енергонезалежним зберігачем інформації та пристроєм індикації та зв'язку з персональним комп'ютером, джерело живлення, вихід якого через підсистему стабілізації живлення з'єднаний з...
Автоматизована система побудови оптимального маршруту руху транспортного агрегату
Номер патенту: 53723
Опубліковано: 11.10.2010
Автори: Морозов Володимир Володимирович, Дергачов Костянтин Юрійович, Грібков Антон Євгенович, Кулік Анатолій Степанович
МПК: G01S 3/02
Мітки: транспортного, оптимального, агрегату, побудови, автоматизована, руху, маршруту, система
Формула / Реферат:
Автоматизована система побудови оптимального маршруту руху транспортного агрегату, що містить приймач, приєднаний до рухомого об'єкта, зв'язаний із глобальною супутниковою системою та керуючим контролером, джерело живлення, вбудований акумулятор, виходи яких з'єднані з підсистемою стабілізації живлення, виходи якої з'єднані з приймачем та керуючим контролером, входи і виходи якого з'єднані з оперативною пам'яттю та енергонезалежним...
Система керування місцезнаходженням рухомого об’єкта
Номер патенту: 78921
Опубліковано: 10.04.2013
Автори: Кулік Анатолій Степанович, Лістунов Андрій Вікторович, Дергачов Костянтин Юрійович
МПК: G08G 1/0968
Мітки: керування, рухомого, об'єкта, місцезнаходженням, система
Формула / Реферат:
Система керування місцезнаходженням рухомого об'єкта, що містить глобальну супутникову систему, перший вхід якої з'єднаний з виходом передавача, а перший вихід з'єднаний з приймачем, керуючий контролер, вхід якого з'єднаний з приймачем, а виходи з'єднані з енергонезалежним зберігачем інформації, пристроєм індикації та зв'язку з персональним комп'ютером та передавачем, джерело живлення, вихід якого через підсистему стабілізації живлення...
Автоматизована інтелектуальна транспортна система
Номер патенту: 78878
Опубліковано: 10.04.2013
Автори: Бортник Христина Романівна, Харіна Наталія Миколаївна, Дергачев Костянтин Юрійович, Кулік Анатолій Степанович
МПК: G01S 3/02
Мітки: інтелектуальна, автоматизована, транспортна, система
Формула / Реферат:
Автоматизована інтелектуальна транспортна система, що містить приймач, приєднаний до рухомого транспортного об'єкта, зв'язаний з глобальною супутниковою системою та керуючим контролером, джерело живлення, вбудований акумулятор, виходи яких з'єднані з підсистемою стабілізації живлення, виходи якої з'єднані з приймачем та керуючим контролером, входи і виходи якого з'єднані з оперативною пам'яттю та енергонезалежним зберігачем інформації,...
Попередній патент: Штам соматичних структур дереворуйнівного базидіоміцета daedalеa quercina (l.) pers. dq-08 – продуцент екзопродуктів перекисного окиснення ліпідів
Наступний патент: Спосіб профілактики гострої післяопераційної нефропатії у хворих на аневризму черевного відділу аорти
Випадковий патент: Спосіб діагностики розвитку остеопорозу