Адаптивна антена радіонавігації
Номер патенту: 85225
Опубліковано: 12.01.2009
Автори: Харченко Володимир Петрович, Ковалевський Едуард Олександрович, Конін Валерій Викторовіч

Формула / Реферат
Адаптивна антена радіонавігації, що містить антенну решітку, N-елементи якої через малошумні підсилювачі та вектор-модулятори зв'язані з суматором, вихід якого по каналу зворотного зв'язку з'єднано через перетворювач до першої проміжної частоти, підсилювач з автоматичним регулюванням підсилення за допомогою керуючого пристрою, керуючого елемента та цифро-аналогового перетворювача, перетворювач до другої проміжної частоти з аналого-цифровим перетворювачем, виходи малошумних підсилювачів через перемикаючий пристрій, що зв'язаний з керуючим пристроєм, з'єднані з перетворювачем до першої проміжної частоти, підсилювачем з автоматичним регулюванням підсилення за допомогою керуючого пристрою, керуючого елемента та цифро-аналогового перетворювача, перетворювач до другої проміжної частоти з аналого-цифровим перетворювачем прямого каналу, яка відрізняється тим, що аналого-цифровий перетворювач прямого каналу з'єднаний з вимірювачем кутів надходження завад, який з'єднаний з входом коректора кутів надходження завад, другий вхід якого з'єднаний з виходом аналого-цифрового перетворювача каналу зворотного зв'язку, а вихід коректора з'єднаний з обчислювачем вагових коефіцієнтів, що з'єднаний в свою чергу з навігаційним приймачем та з керуючим пристроєм, вихід обчислювача з'єднаний через цифро-аналогові перетворювачі з керуючими входами вектор-модуляторів.
Текст
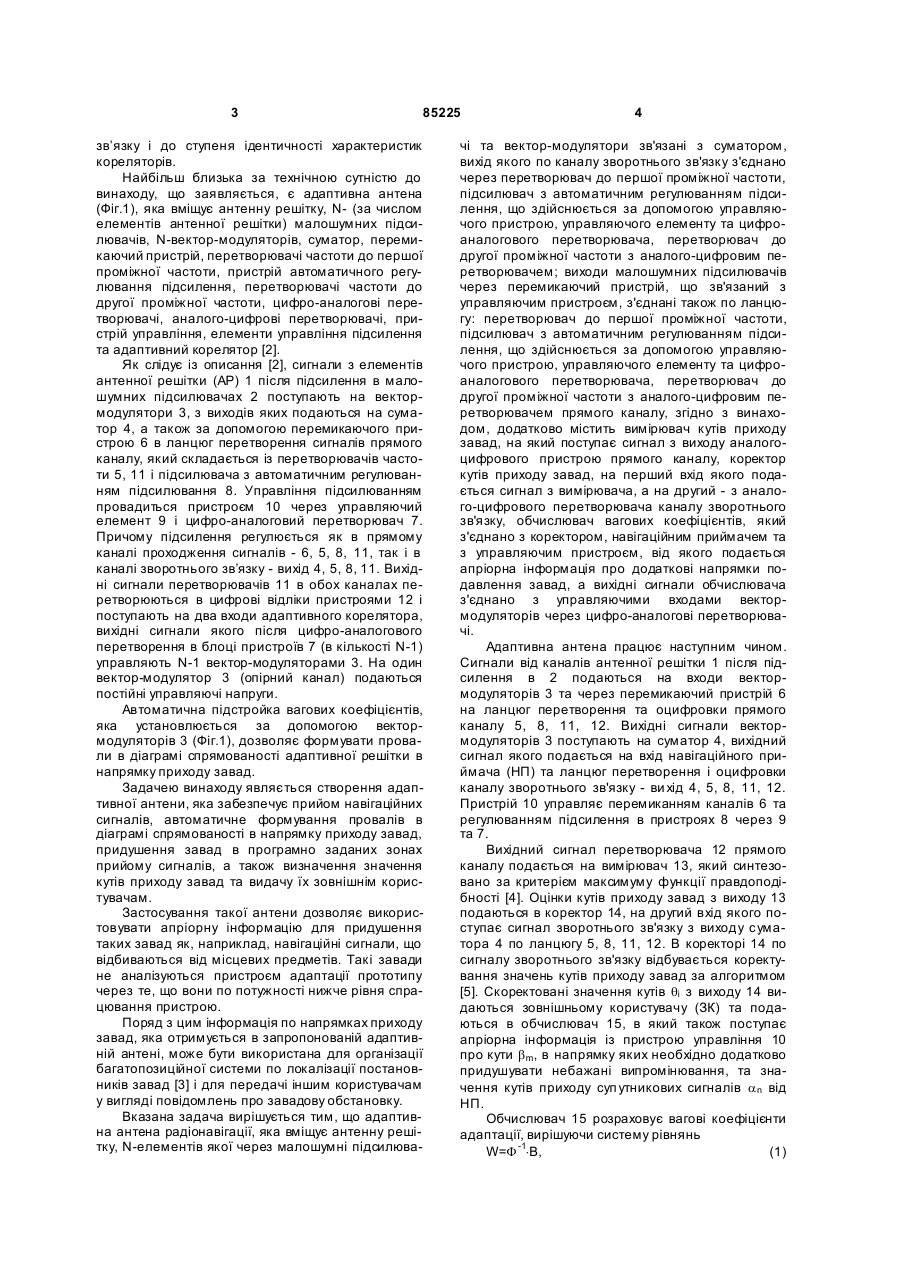
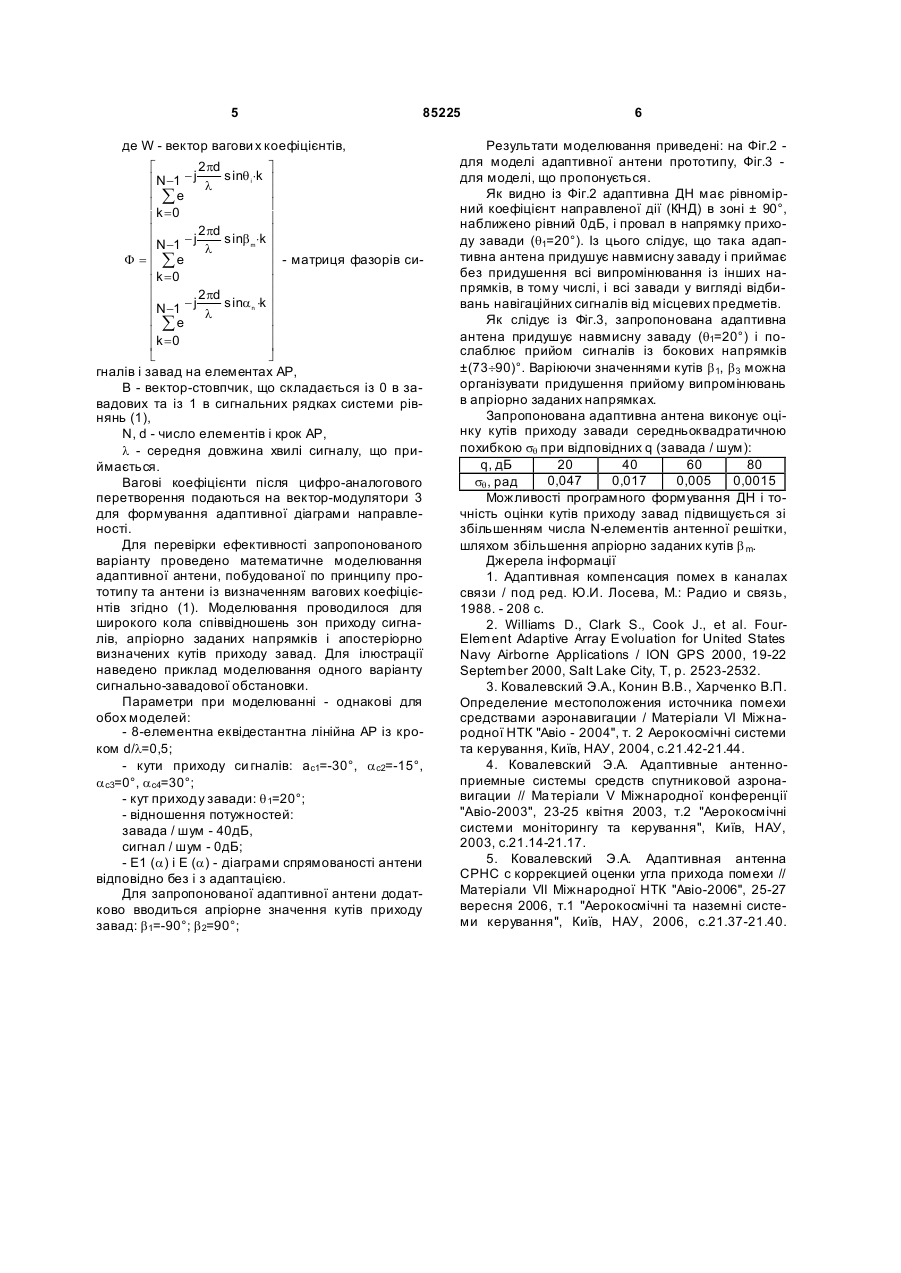
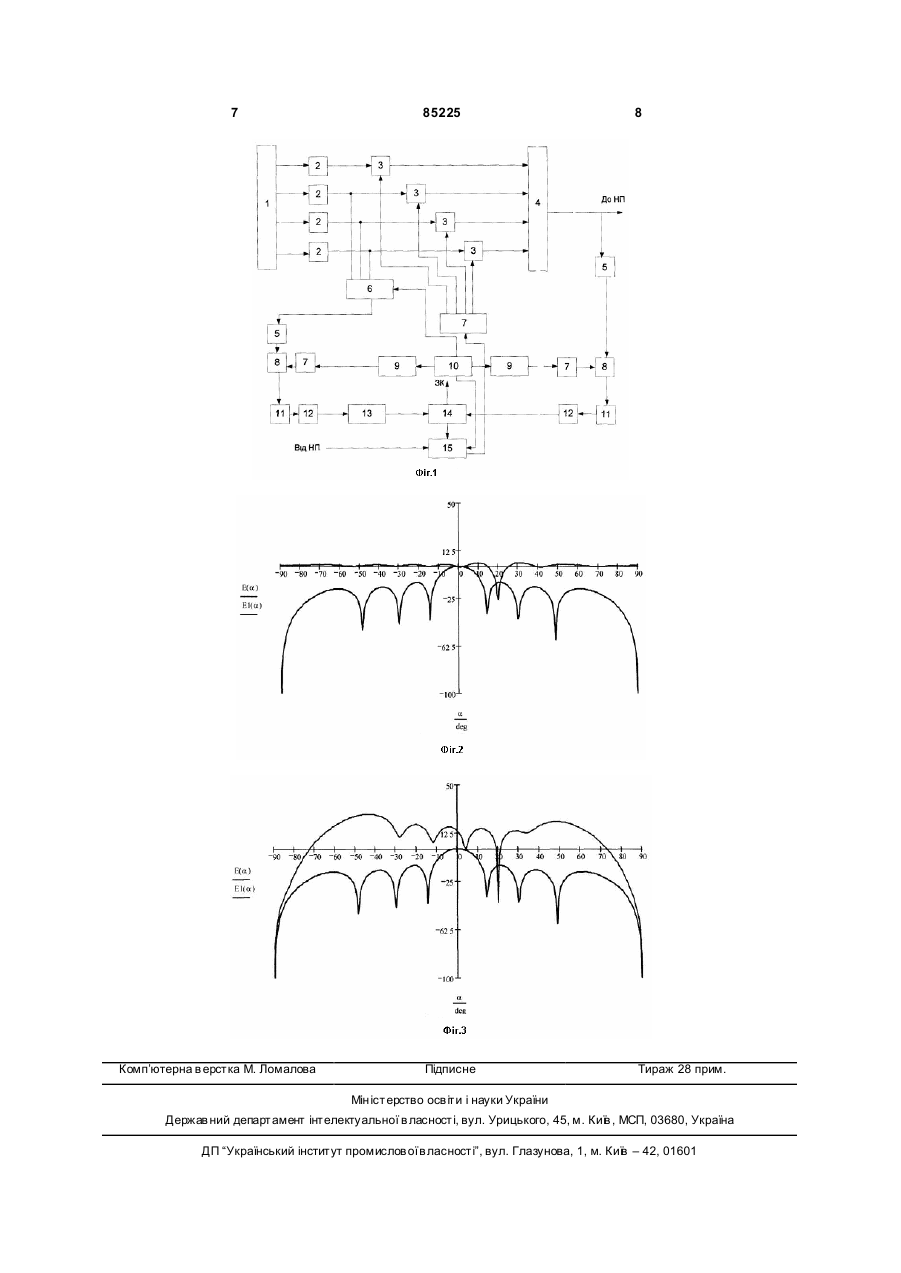
Адаптивна антена радіонавігації, що містить антенну решітку, N-елементи якої через малошумні підсилювачі та вектор-модулятори зв'язані з суматором, вихід якого по каналу зворотного зв'язку з'єднано через перетворювач до першої проміжної частоти, підсилювач з автоматичним регулюванням підсилення за допомогою керуючого пристрою, керуючого елемента та цифроаналогового перетворювача, перетворювач до другої проміжної частоти з аналого-цифровим перетворювачем, виходи малошумних підсилювачів через перемикаючий пристрій, що зв'язаний з керуючим пристроєм, з'єднані з перетворювачем до першої проміжної частоти, підсилювачем з автоматичним регулюванням підсилення за допомогою керуючого пристрою, керуючого елемента та цифро-аналогового перетворювача, перетворювач до другої проміжної частоти з аналого-цифровим перетворювачем прямого каналу, яка відрізняється тим, що аналого-цифровий перетворювач прямого каналу з'єднаний з вимірювачем кутів надходження завад, який з'єднаний з входом коректора кутів надходження завад, другий вхід якого з'єднаний з виходом аналого-цифрового перетворювача каналу зворотного зв'язку, а ви хід коректора з'єднаний з обчислювачем вагових коефіцієнтів, що з'єднаний в свою чергу з навігаційним приймачем та з керуючим пристроєм, вихід обчислювача з'єднаний через цифро-аналогові перетворювачі з керуючими входами вектор-модуляторів. (19) UA (21) a200611020 (22) 18.10.2006 (24) 12.01.2009 (46) 12.01.2009, Бюл.№ 1, 2009 р. (72) КОВАЛЕВСЬКИЙ ЕДУАРД ОЛЕКСАНДРОВИЧ, UA, КОНІН ВАЛЕРІЙ ВІКТОРОВИЧ, UA, ХАРЧЕНКО ВОЛОДИ МИР ПЕТРОВИЧ, UA (73) НАЦІОНАЛЬНИЙ АВІАЦІЙНИЙ УНІВЕРСИТЕТ (НАУ), U A (56) Williams D., Clark S., Cook J., et al. FourElement Adaptive Array Evoluation for United States Navy Airborne Applications / ION GPS 2000,19-22 September 2000, Salt Lake City, T, p. 2523-2532. Ковалевский Э.А., Конин В.В., Харченко В.П. Определение местоположения источника помехи средствами аэронавигации/Матеріали VI Міжнародної НТК "Авіо - 2004", т.2 Аерокосмічні системи та керування, Київ, НАУ, 2004, с.21.42 - 21.44. Ковалевский Э.А. Адаптивные антенно-приемные системы средств спутниковой аэронавигации //Матеріали V Міжнародної конференції"Авіо2003", 23-25 квітня 2003, т.2 "Аерокосмічні системи моніторингу та керування", Київ, НАУ, 2003, с.21.14-21.17 Ковалевский Э.А. Адаптивная антенна СРНС с коррекцией оценки угла прихода помехи // Матеріали VII Міжнародної НТК "Авіо-2006", 25 -27 вересня 2006, т.1 "Аерокосмічні та наземні системи керування", Київ, Н АУ, 2006, с.21.37 - 21.40. UA 55238 A, 17.03.2003 RU 2280929 C1, 27.07.2006 US 6175327, 16.01.2001 WO 9221162, 26.11.1992 C2 2 (11) 1 3 85225 зв’язку і до ступеня ідентичності характеристик кореляторів. Найбільш близька за технічною сутністю до винаходу, що заявляється, є адаптивна антена (Фіг.1), яка вміщує антенну решітку, N- (за числом елементів антенної решітки) малошумних підсилювачів, N-вектор-модуляторів, суматор, перемикаючий пристрій, перетворювачі частоти до першої проміжної частоти, пристрій автоматичного регулювання підсилення, перетворювачі частоти до другої проміжної частоти, цифро-аналогові перетворювачі, аналого-цифрові перетворювачі, пристрій управління, елементи управління підсилення та адаптивний корелятор [2]. Як слідує із описання [2], сигнали з елементів антенної решітки (АР) 1 після підсилення в малошумних підсилювачах 2 поступають на вектормодулятори 3, з виходів яких подаються на суматор 4, а також за допомогою перемикаючого пристрою 6 в ланцюг перетворення сигналів прямого каналу, який складається із перетворювачів частоти 5, 11 і підсилювача з автоматичним регулюванням підсилювання 8. Управління підсилюванням провадиться пристроєм 10 через управляючий елемент 9 і цифро-аналоговий перетворювач 7. Причому підсилення регулюється як в прямому каналі проходження сигналів - 6, 5, 8, 11, так і в каналі зворотнього зв’язку - вихід 4, 5, 8, 11. Вихідні сигнали перетворювачів 11 в обох каналах перетворюються в цифрові відліки пристроями 12 і поступають на два входи адаптивного корелятора, вихідні сигнали якого після цифро-аналогового перетворення в блоці пристроїв 7 (в кількості N-1) управляють N-1 вектор-модуляторами 3. На один вектор-модулятор 3 (опірний канал) подаються постійні управляючі напруги. Автоматична підстройка вагових коефіцієнтів, яка установлюється за допомогою вектормодуляторів 3 (Фіг.1), дозволяє формувати провали в діаграмі спрямованості адаптивної решітки в напрямку приходу завад. Задачею винаходу являється створення адаптивної антени, яка забезпечує прийом навігаційних сигналів, автоматичне формування провалів в діаграмі спрямованості в напрямку приходу завад, придушення завад в програмно заданих зонах прийому сигналів, а також визначення значення кутів приходу завад та видачу їх зовнішнім користувачам. Застосування такої антени дозволяє використовувати апріорну інформацію для придушення таких завад як, наприклад, навігаційні сигнали, що відбиваються від місцевих предметів. Такі завади не аналізуються пристроєм адаптації прототипу через те, що вони по потужності нижче рівня спрацювання пристрою. Поряд з цим інформація по напрямках приходу завад, яка отримується в запропонованій адаптивній антені, може бути використана для організації багатопозиційної системи по локалізації постановників завад [3] і для передачі іншим користувачам у вигляді повідомлень про завадову обстановку. Вказана задача вирішується тим, що адаптивна антена радіонавігації, яка вміщує антенну решітку, N-елементів якої через малошумні підсилюва 4 чі та вектор-модулятори зв'язані з суматором, вихід якого по каналу зворотнього зв'язку з'єднано через перетворювач до першої проміжної частоти, підсилювач з автоматичним регулюванням підсилення, що здійснюється за допомогою управляючого пристрою, управляючого елементу та цифроаналогового перетворювача, перетворювач до другої проміжної частоти з аналого-цифровим перетворювачем; виходи малошумних підсилювачів через перемикаючий пристрій, що зв'язаний з управляючим пристроєм, з'єднані також по ланцюгу: перетворювач до першої проміжної частоти, підсилювач з автоматичним регулюванням підсилення, що здійснюється за допомогою управляючого пристрою, управляючого елементу та цифроаналогового перетворювача, перетворювач до другої проміжної частоти з аналого-цифровим перетворювачем прямого каналу, згідно з винаходом, додатково містить вимірювач кутів приходу завад, на який поступає сигнал з виходу аналогоцифрового пристрою прямого каналу, коректор кутів приходу завад, на перший вхід якого подається сигнал з вимірювача, а на другий - з аналого-цифрового перетворювача каналу зворотнього зв'язку, обчислювач вагових коефіцієнтів, який з'єднано з коректором, навігаційним приймачем та з управляючим пристроєм, від якого подається апріорна інформація про додаткові напрямки подавлення завад, а вихідні сигнали обчислювача з'єднано з управляючими входами вектормодуляторів через цифро-аналогові перетворювачі. Адаптивна антена працює наступним чином. Сигнали від каналів антенної решітки 1 після підсилення в 2 подаються на входи вектормодуляторів 3 та через перемикаючий пристрій 6 на ланцюг перетворення та оцифровки прямого каналу 5, 8, 11, 12. Вихідні сигнали вектормодуляторів 3 поступають на суматор 4, вихідний сигнал якого подається на вхід навігаційного приймача (НП) та ланцюг перетворення і оцифровки каналу зворотнього зв'язку - ви хід 4, 5, 8, 11, 12. Пристрій 10 управляє перемиканням каналів 6 та регулюванням підсилення в пристроях 8 через 9 та 7. Вихідний сигнал перетворювача 12 прямого каналу подається на вимірювач 13, який синтезовано за критерієм максимуму функції правдоподібності [4]. Оцінки кутів приходу завад з виходу 13 подаються в коректор 14, на другий вхід якого поступає сигнал зворотнього зв'язку з виходу суматора 4 по ланцюгу 5, 8, 11, 12. В коректорі 14 по сигналу зворотнього зв'язку відбувається коректування значень кутів приходу завад за алгоритмом [5]. Скоректовані значення кутів qі з виходу 14 видаються зовнішньому користувачу (ЗК) та подаються в обчислювач 15, в який також поступає апріорна інформація із пристрою управління 10 про кути b m, в напрямку яких необхідно додатково придушувати небажані випромінювання, та значення кутів приходу суп утникових сигналів a n від НП. Обчислювач 15 розраховує вагові коефіцієнти адаптації, вирішуючи систему рівнянь W=F -1×В, (1) 5 85225 де W - вектор вагови х коефіцієнтів, 2pd é ù ê N-1 - j l sinq i ×k ú ê åe ú ê ú ê k =0 ú ê 2pd ú ê N-1 - j l sinb m ×k ú ú - матриця фазорів сиF = ê åe ê ú k =0 ê ú ê 2pd ú -j sina n ×k ú ê N-1 l ê åe ú ê ú ê k =0 ú ë û гналів і завад на елементах АР, В - вектор-стовпчик, що складається із 0 в завадових та із 1 в сигнальних рядках системи рівнянь (1), N, d - число елементів і крок АР, l - середня довжина хвилі сигналу, що приймається. Вагові коефіцієнти після цифро-аналогового перетворення подаються на вектор-модулятори 3 для формування адаптивної діаграми направленості. Для перевірки ефективності запропонованого варіанту проведено математичне моделювання адаптивної антени, побудованої по принципу прототипу та антени із визначенням вагових коефіцієнтів згідно (1). Моделювання проводилося для широкого кола співвідношень зон приходу сигналів, апріорно заданих напрямків і апостеріорно визначених кутів приходу завад. Для ілюстрації наведено приклад моделювання одного варіанту сигнально-завадової обстановки. Параметри при моделюванні - однакові для обох моделей: - 8-елементна еквідестантна лінійна АР із кроком d/l=0,5; - кути приходу си гналів: ас1=-30°, a с2=-15°, a с3=0°, a с4=30°; - кут приходу завади: q 1=20°; - відношення потужностей: завада / шум - 40дБ, сигнал / шум - 0дБ; - Ε1 (a) і Ε (a) - діаграми спрямованості антени відповідно без і з адаптацією. Для запропонованої адаптивної антени додатково вводиться апріорне значення кутів приходу завад: b 1=-90°; b 2=90°; 6 Результати моделювання приведені: на Фіг.2 для моделі адаптивної антени прототипу, Фіг.3 для моделі, що пропонується. Як видно із Фіг.2 адаптивна ДН має рівномірний коефіцієнт направленої дії (КНД) в зоні ± 90°, наближено рівний 0дБ, і провал в напрямку приходу завади (q1=20°). Із цього слідує, що така адаптивна антена придушує навмисну заваду і приймає без придушення всі випромінювання із інших напрямків, в тому числі, і всі завади у вигляді відбивань навігаційних сигналів від місцевих предметів. Як слідує із Фіг.3, запропонована адаптивна антена придушує навмисну заваду (q1=20°) і послаблює прийом сигналів із бокових напрямків ±(73¸90)°. Варіюючи значеннями кутів b 1, b 3 можна організувати придушення прийому випромінювань в апріорно заданих напрямках. Запропонована адаптивна антена виконує оцінку кутів приходу завади середньоквадратичною похибкою sq при відповідних q (завада / шум): q, дБ 20 40 60 80 0,047 0,017 0,005 0,0015 sq , рад Можливості програмного формування ДН і точність оцінки кутів приходу завад підвищується зі збільшенням числа N-елементів антенної решітки, шляхом збільшення апріорно заданих кутів b m. Джерела інформації 1. Адаптивная компенсация помех в каналах связи / под ред. Ю.И. Лосева, Μ.: Радио и связь, 1988. - 208 с. 2. Williams D., Clark S., Cook J., et al. FourElement Adaptive Array Evoluation for United States Navy Airborne Applications / ION GPS 2000, 19-22 September 2000, Salt Lake City, T, p. 2523-2532. 3. Ковалевский Э.А., Конин В.В., Харченко В.П. Определение местоположения источника помехи средствами аэронавигации / Матеріали VI Міжнародної НТК "Авіо - 2004", т. 2 Аерокосмічні системи та керування, Київ, НАУ, 2004, с.21.42-21.44. 4. Ковалевский Э.А. Адаптивные антенноприемные системы средств спутниковой азронавигации // Ма теріали V Міжнародної конференції "Авіо-2003", 23-25 квітня 2003, т.2 "Аерокосмічні системи моніторингу та керування", Київ, НАУ, 2003, с.21.14-21.17. 5. Ковалевский Э.А. Адаптивная антенна СРНС с коррекцией оценки угла прихода помехи // Матеріали VII Міжнародної НТК "Авіо-2006", 25-27 вересня 2006, т.1 "Аерокосмічні та наземні системи керування", Київ, НАУ, 2006, с.21.37-21.40. 7 Комп’ютерна в ерстка М. Ломалова 85225 8 Підписне Тираж 28 прим. Міністерство осв іт и і науки України Держав ний департамент інтелектуальної в ласності, вул. Урицького, 45, м. Київ , МСП, 03680, Україна ДП “Український інститут промислов ої в ласності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюAdaptive antenna for radio navigation
Автори англійськоюKovalenko Eduard Oleksandrovych, Konin Valerii Viktorovych, Kharchenko Volodymyr Petrovych
Назва патенту російськоюАдаптивная антенна радионавигации
Автори російськоюКовалевский Эдуард Александрович, Конин Валерий Викторович, Харченко Владимир Петрович
МПК / Мітки
МПК: H01Q 21/06
Мітки: радіонавігації, адаптивна, антена
Код посилання
<a href="https://ua.patents.su/4-85225-adaptivna-antena-radionavigaci.html" target="_blank" rel="follow" title="База патентів України">Адаптивна антена радіонавігації</a>
Самофокусівна антена з адаптивною поляризацією
Номер патенту: 10968
Опубліковано: 15.12.2005
Автори: Ільницький Людвіг Якович, Щербина Ольга Алімівна
МПК: H01Q 23/00
Мітки: адаптивною, поляризацією, самофокусівна, антена
Формула / Реферат:
Самофокусівна антена з адаптивною поляризацією, що містить чотири змішувачі, гетеродин, яка відрізняється тим, що додатково містить перший, другий, третій і четвертий змішувачі, треті входи яких приєднані до виходу гетеродина, перші та другі входи першого і другого змішувачів з'єднані з виходами першого і другого симетричних вібраторів антенної решітки, а виходи третього і четвертого симетричних вібраторів антенної решітки підключені до...
Адаптивна по дальності антенна решітка
Номер патенту: 55238
Опубліковано: 17.03.2003
Автори: Федоров Володимир Іванович, Бадеха Дмитро Вікторович, Гусєв Юрій Германович, Саричев Юрій Олексійович, Копитко Ігор Йосипович
МПК: G01S 5/04
Мітки: решітка, антенна, адаптивна, дальності
Формула / Реферат:
1. Адаптивна по дальності антенна решітка, що містить три рознесені у просторі й однаково орієнтовані елементи в трьох прийомних каналах, три фільтри, три перетворювачі частоти, три блоки вагових коефіцієнтів, суматор, детектор, процесор, причому виходи елементів решітки кожного з трьох каналів підключені до входів відповідних фільтрів, виходи яких з'єднані з відповідними входами перетворювачів частоти, виходи перетворювачів частоти першого і...
Адаптивна система управління
Номер патенту: 11808
Опубліковано: 16.01.2006
Автори: Шемшур Микола Володимирович, Симонов Володимир Федорович, Бандура Іван Миколайович, Рудико Оксана Вікторівна
МПК: G05B 13/00
Мітки: система, адаптивна, управління
Формула / Реферат:
1. Адаптивна система управління, що містить перший блок інтеграторів, перший блок підсилювачів, об'єкт управління, другий блок інтеграторів, яка відрізняється тим, що в систему введено обчислювач, з'єднаний з виходом пристрою узгодження через блок аналого-цифрових перетворювачів та з входом другого блока інтеграторів через блок цифро-аналогових перетворювачів.2. Адаптивна система управління за п. 1, яка відрізняється тим, що пристрій...
Система для супроводження рухомих об’єктів з використанням сигналів глобальної супутникової системи радіонавігації
Номер патенту: 8150
Опубліковано: 15.07.2005
Автори: Авдєєнко Гліб Леонідович, Жукова Маргарита Василівна, Якорнов Євгеній Аркадійович, Саричев Юрій Олексійович, Копитко Ігор Йосипович
МПК: G01S 5/14
Мітки: система, системі, радіонавігації, об'єктів, сигналів, супроводження, супутникової, рухомих, використанням, глобальної
Формула / Реферат:
Система для супроводження рухомих об'єктів з використанням глобальної супутникової системи радіонавігації, що містить центральний пост у складі робочої станції з двома приймально-передавальними антенами, що складається з каскадно з'єднаних приймача з датчиком команд і пристрою обробки, перший вихід якого з'єднаний з першим входом приймача з датчиком команд, блока управління, вхід якого з'єднаний з першим виходом робочої станції, який є другим...
Адаптивна система керування
Номер патенту: 26903
Опубліковано: 10.10.2007
Автори: Сиротська Ольга Олександрівна, Гавриленко Олег Іванович, Тарасенко Олексій Володимирович, Мирна Олена Володимирівна
МПК: G05B 13/02
Мітки: адаптивна, керування, система
Формула / Реферат:
Адаптивна система керування, що містить адаптивний регулятор, який складається з трьох суматорів, перший суматор з'єднаний паралельно з інтегратором і диференціатором і послідовно з другим суматором; виходи інтегратора і диференціатора з'єднані з другим суматором, який послідовно з'єднаний із блоком множення, яка відрізняється тим, що в систему введений датчик збурювальної дії, з'єднаний із третім суматором, вихід якого з'єднаний із першим...
Попередній патент: Респіратор
Наступний патент: Альгінат олігосахариду та його похідні, їх одержання та застосування
Випадковий патент: Паста гарбузова