Гідрооб’ємний привід самохідної машини
Номер патенту: 85568
Опубліковано: 25.11.2013
Автори: Казацкій Васілій Алєксандровіч, Сєй Васілій Павловіч, Кондратчік Лєонід Валєрьєвіч
Формула / Реферат
Гідрооб'ємний привід самохідної машини, який містить два незалежні контури гідростатичного приводу ходу, кожен з яких містить у собі гідравлічно керовану помпу, з'єднану гідролініями з відповідним гідромотором за закритою схемою, систему керування приводу та систему підживлення помп, що включає помпи підживлення на кожен контур, який відрізняється тим, що напірні магістралі гідромоторів з'єднано між собою гідролініями з установленими в них дроселями з можливістю компенсації обсягу робочої рідини, що перетікає між контурами, за допомогою гідролінії, що об'єднує помпи підживлення.
Текст
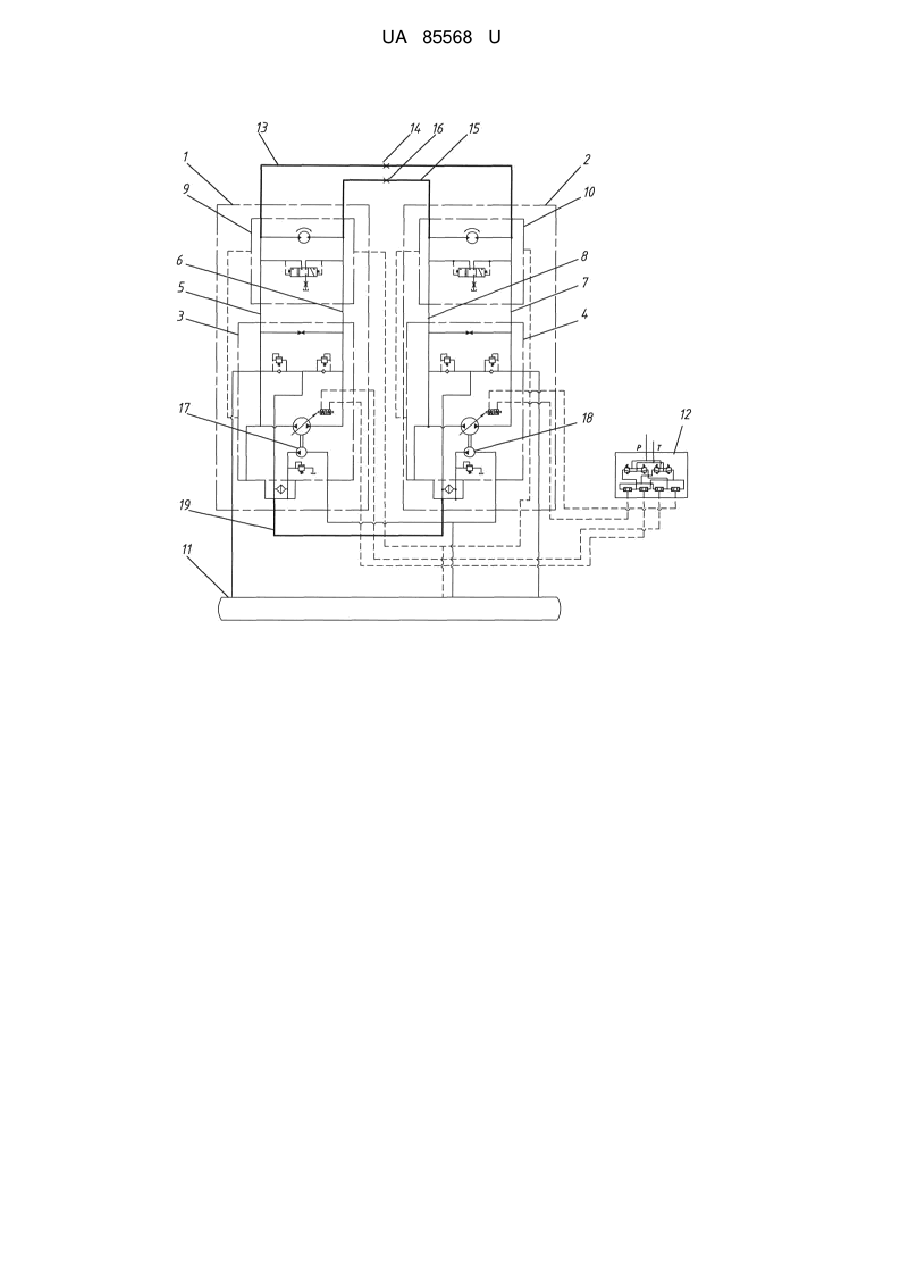
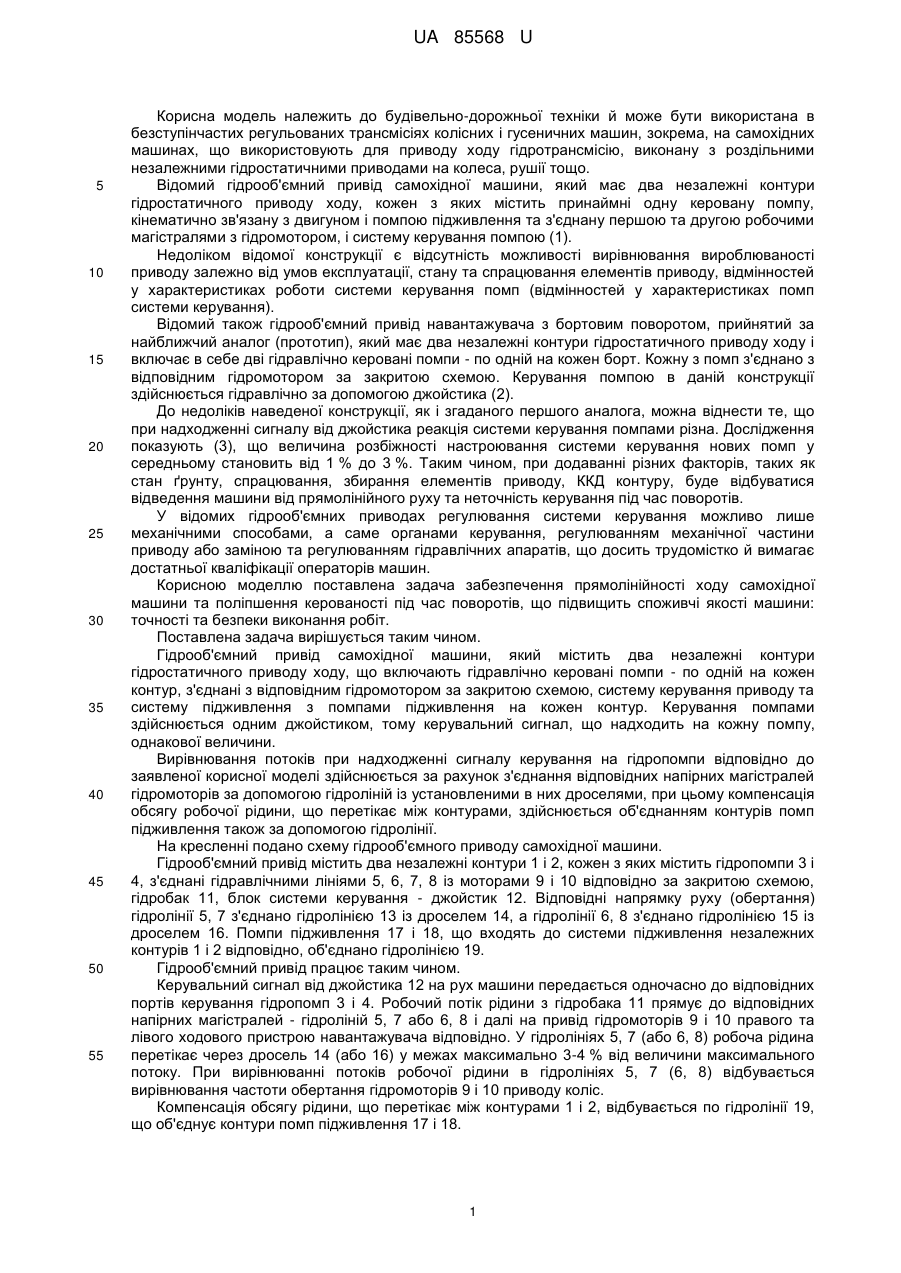
Реферат: Гідрооб'ємний привід самохідної машини містить два незалежні контури гідростатичного приводу ходу, кожен з яких містить у собі гідравлічно керовану помпу, з'єднану гідролініями з відповідним гідромотором за закритою схемою, систему керування приводу та систему підживлення помп, що включає помпи підживлення на кожен контур. Напірні магістралі гідромоторів з'єднано між собою гідролініями з установленими в них дроселями з можливістю компенсації обсягу робочої рідини, що перетікає між контурами, за допомогою гідролінії, що об'єднує помпи підживлення. UA 85568 U (12) UA 85568 U UA 85568 U 5 10 15 20 25 30 35 40 45 50 55 Корисна модель належить до будівельно-дорожньої техніки й може бути використана в безступінчастих регульованих трансмісіях колісних і гусеничних машин, зокрема, на самохідних машинах, що використовують для приводу ходу гідротрансмісію, виконану з роздільними незалежними гідростатичними приводами на колеса, рушії тощо. Відомий гідрооб'ємний привід самохідної машини, який має два незалежні контури гідростатичного приводу ходу, кожен з яких містить принаймні одну керовану помпу, кінематично зв'язану з двигуном і помпою підживлення та з'єднану першою та другою робочими магістралями з гідромотором, і систему керування помпою (1). Недоліком відомої конструкції є відсутність можливості вирівнювання вироблюваності приводу залежно від умов експлуатації, стану та спрацювання елементів приводу, відмінностей у характеристиках роботи системи керування помп (відмінностей у характеристиках помп системи керування). Відомий також гідрооб'ємний привід навантажувача з бортовим поворотом, прийнятий за найближчий аналог (прототип), який має два незалежні контури гідростатичного приводу ходу і включає в себе дві гідравлічно керовані помпи - по одній на кожен борт. Кожну з помп з'єднано з відповідним гідромотором за закритою схемою. Керування помпою в даній конструкції здійснюється гідравлічно за допомогою джойстика (2). До недоліків наведеної конструкції, як і згаданого першого аналога, можна віднести те, що при надходженні сигналу від джойстика реакція системи керування помпами різна. Дослідження показують (3), що величина розбіжності настроювання системи керування нових помп у середньому становить від 1 % до 3 %. Таким чином, при додаванні різних факторів, таких як стан ґрунту, спрацювання, збирання елементів приводу, ККД контуру, буде відбуватися відведення машини від прямолінійного руху та неточність керування під час поворотів. У відомих гідрооб'ємних приводах регулювання системи керування можливо лише механічними способами, а саме органами керування, регулюванням механічної частини приводу або заміною та регулюванням гідравлічних апаратів, що досить трудомістко й вимагає достатньої кваліфікації операторів машин. Корисною моделлю поставлена задача забезпечення прямолінійності ходу самохідної машини та поліпшення керованості під час поворотів, що підвищить споживчі якості машини: точності та безпеки виконання робіт. Поставлена задача вирішується таким чином. Гідрооб'ємний привід самохідної машини, який містить два незалежні контури гідростатичного приводу ходу, що включають гідравлічно керовані помпи - по одній на кожен контур, з'єднані з відповідним гідромотором за закритою схемою, систему керування приводу та систему підживлення з помпами підживлення на кожен контур. Керування помпами здійснюється одним джойстиком, тому керувальний сигнал, що надходить на кожну помпу, однакової величини. Вирівнювання потоків при надходженні сигналу керування на гідропомпи відповідно до заявленої корисної моделі здійснюється за рахунок з'єднання відповідних напірних магістралей гідромоторів за допомогою гідроліній із установленими в них дроселями, при цьому компенсація обсягу робочої рідини, що перетікає між контурами, здійснюється об'єднанням контурів помп підживлення також за допомогою гідролінії. На кресленні подано схему гідрооб'ємного приводу самохідної машини. Гідрооб'ємний привід містить два незалежні контури 1 і 2, кожен з яких містить гідропомпи 3 і 4, з'єднані гідравлічними лініями 5, 6, 7, 8 із моторами 9 і 10 відповідно за закритою схемою, гідробак 11, блок системи керування - джойстик 12. Відповідні напрямку руху (обертання) гідролінії 5, 7 з'єднано гідролінією 13 із дроселем 14, а гідролінії 6, 8 з'єднано гідролінією 15 із дроселем 16. Помпи підживлення 17 і 18, що входять до системи підживлення незалежних контурів 1 і 2 відповідно, об'єднано гідролінією 19. Гідрооб'ємний привід працює таким чином. Керувальний сигнал від джойстика 12 на рух машини передається одночасно до відповідних портів керування гідропомп 3 і 4. Робочий потік рідини з гідробака 11 прямує до відповідних напірних магістралей - гідроліній 5, 7 або 6, 8 і далі на привід гідромоторів 9 і 10 правого та лівого ходового пристрою навантажувача відповідно. У гідролініях 5, 7 (або 6, 8) робоча рідина перетікає через дросель 14 (або 16) у межах максимально 3-4 % від величини максимального потоку. При вирівнюванні потоків робочої рідини в гідролініях 5, 7 (6, 8) відбувається вирівнювання частоти обертання гідромоторів 9 і 10 приводу коліс. Компенсація обсягу рідини, що перетікає між контурами 1 і 2, відбувається по гідролінії 19, що об'єднує контури помп підживлення 17 і 18. 1 UA 85568 U 5 Таким чином, заявлена корисна модель забезпечує повну керованість машини як під час прямолінійного руху, так і під час виконання поворотів. Джерела інформації: 1. Корисна модель РБ № 7444 "Гідрооб'ємний привід самохідної машини", опубл. 2011.08.30. 2. Посібник з експлуатації 211.00.00.000РЭ "Навантажувач із бортовим поворотом АМКОДОР 211", Мінськ, 2011 р. 3. Протокол № 2137 тензометричних випробувань гідросистеми ходу навантажувача А-211. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 10 15 Гідрооб'ємний привід самохідної машини, який містить два незалежні контури гідростатичного приводу ходу, кожен з яких містить у собі гідравлічно керовану помпу, з'єднану гідролініями з відповідним гідромотором за закритою схемою, систему керування приводу та систему підживлення помп, що включає помпи підживлення на кожен контур, який відрізняється тим, що напірні магістралі гідромоторів з'єднано між собою гідролініями з установленими в них дроселями з можливістю компенсації обсягу робочої рідини, що перетікає між контурами, за допомогою гідролінії, що об'єднує помпи підживлення. Комп’ютерна верстка А. Крижанівський Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 2
ДивитисяДодаткова інформація
Автори російськоюСей Василий Павлович, Казацкий Василий Александрович, Кондратчик Леонид Валерьевич
МПК / Мітки
МПК: B60K 17/10, F16H 61/00, F16H 39/00
Мітки: привід, самохідної, гідрооб'ємний, машини
Код посилання
<a href="https://ua.patents.su/4-85568-gidroobehmnijj-privid-samokhidno-mashini.html" target="_blank" rel="follow" title="База патентів України">Гідрооб’ємний привід самохідної машини</a>
Система автоматичного водіння самохідної колісної машини
Номер патенту: 71847
Опубліковано: 15.12.2004
Автори: Поляшенко Сергій Олексійович, Парфьонова Наталя Сергійовна
МПК: A01B 69/04
Мітки: колісної, автоматичного, самохідної, система, водіння, машини
Формула / Реферат:
Система автоматичного водіння самохідної колісної машини, що містить регулятор, виконавчий елемент, датчик копіювання, датчик положення керуючих коліс і суматор, яка відрізняється тим, що з метою підвищення точності відстеження заданої траєкторії, введені регульований інтегратор і датчик швидкості, причому регульований інтегратор включений послідовно між додатковим входом суматора і виходом датчика копіювання, а ланцюг керування коефіцієнтом...
Гідрооб’ємний привід самохідної машини
Номер патенту: 15358
Опубліковано: 28.02.2000
Автор: Лютий Ігор Іванович
МПК: B60K 17/10
Мітки: самохідної, машини, привід, гідрооб'ємний
Формула / Реферат:
1. Гидрообъемный привод самоходной машины, содержащий, приводимый в движение двигателем, гидронасос регулируемой производительности, насос подпитки, выходная линяя которого сообщена через обратный клапаны с нагнетательной и сливной гидролинией, которыми гидронасос подключен, по меньшей мере, к одному регулируемому гидромотору, отличающийся тем, что регулируемый гидромотор выполнен с диапазоном регулирования рабочего объема от...
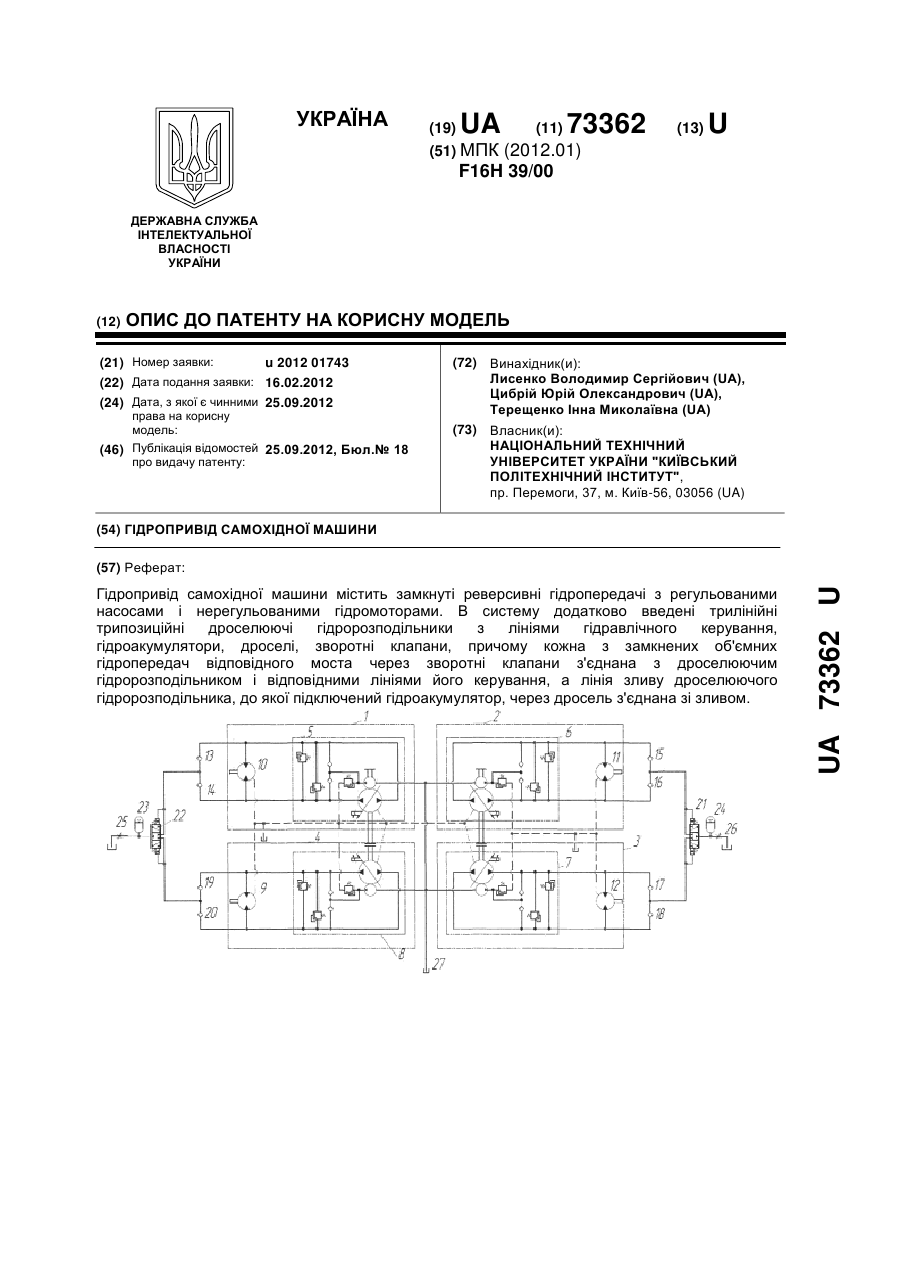
Гідропривід самохідної машини
Номер патенту: 73362
Опубліковано: 25.09.2012
Автори: Цибрій Юрій Олександрович, Терещенко Інна Миколаївна, Лисенко Володимир Сергійович
МПК: F16H 39/00
Мітки: машини, гідропривід, самохідної
Формула / Реферат:
Гідропривід самохідної машини, що містить замкнуті реверсивні гідропередачі з регульованими насосами і нерегульованими гідромоторами, який відрізняється, тим, що в систему додатково введені трилінійні трипозиційні дроселюючі гідророзподільники з лініями гідравлічного керування, гідроакумулятори, дроселі, зворотні клапани, причому кожна з замкнених об'ємних гідропередач відповідного моста через зворотні клапани з'єднана з дроселюючим...
Пристрій для автоматичного керування і регулювання руху самохідної машини по рядках рослин

Номер патенту: 56641
Опубліковано: 15.05.2003
Автори: Гевко Іван Богданович, Білик Стефанія Григорівна
МПК: A01B 69/04
Мітки: пристрій, самохідної, рослин, керування, машини, рядках, автоматичного, регулювання, руху
Формула / Реферат:
Пристрій для автоматичного керування і регулювання руху самохідної машини по рядках рослин, що містить керований міст з колесами, на якому встановлений гідроциліндр, корпус якого шарнірно з'єднаний з керованим мостом, а шток через тягу зв'язаний з рульовою трапецією повороту коліс, а також копіюючий щуп, зв’язаний з помпою-дозатором автомата, кермо, зв'язане з помпою-дозатором керма, гідросистему, виконану у вигляді масляного бака, помпи,...
Об’ємний гідропривід повнопривідних коліс самохідної машини
Номер патенту: 28784
Опубліковано: 15.05.2002
Автори: Єхніч Олександр Олексійович, Дідух Віктор Миколайович, Плютін Іван Іванович, Гаркуша Анатолій Григорович, Лютий Ігор Іванович, Забавін Олександр Альбертович, Воронович Віктор Петрович, Корецький Іван Степанович, Приходько Володимир Іванович, Гонтар Віктор Григорович
МПК: B60K 17/10
Мітки: повнопривідних, коліс, об'ємний, самохідної, машини, гідропривід
Формула / Реферат:
1. Об'ємний гідропривід повнопривідних коліс самохідної машини, вміщуючий зрушуваний в рух двигуном гідронасос регульованої продуктивності, насос підживлення, вихідна гідролінія якого сполучена через зворотні клапани з нагнітальною та зливною гідролінією гідронасоса 1, щонайменше, один реверсивний регульований гідромотор, який має тільки максимальний робочий об'єм 1 нульовий, порожнина одного з керуючих гідроциліндрів якого сполучена через...
Попередній патент: Надувний катамаран
Наступний патент: Бульдозерне обладнання
Випадковий патент: Спосіб виготовлення ущільнюючої прокладки з термічно розщепленого графіту