Спосіб компенсації сил реакції гіротурбіни
Формула / Реферат
1. Спосіб компенсації сил реакції гіротурбіни з обертанням робочих тіл (1), розподілених навколо відповідних локальних осей (2), з переміщенням усіх робочих тіл (1) по замкнутій траєкторії (8) навколо спільної осі (3) примусової прецесії та з узгодженням кутової швидкості ![]() переміщення кожного робочого тіла (1) навколо спільної осі (3) зі швидкістю ω його обертання навколо відповідної локальної осі (2), який відрізняється тим, що використовують компенсуюче тіло (4), розподілене навколо спільної осі (3) примусової прецесії, яке обертають навколо спільної осі (3) примусової прецесії в напрямку, протилежному до напрямку переміщення робочих тіл (1) навколо тієї ж спільної осі (3).
переміщення кожного робочого тіла (1) навколо спільної осі (3) зі швидкістю ω його обертання навколо відповідної локальної осі (2), який відрізняється тим, що використовують компенсуюче тіло (4), розподілене навколо спільної осі (3) примусової прецесії, яке обертають навколо спільної осі (3) примусової прецесії в напрямку, протилежному до напрямку переміщення робочих тіл (1) навколо тієї ж спільної осі (3).
2. Спосіб за п. 1, який відрізняється тим, що кутову швидкість обертання ![]() компенсуючого тіла (4) навколо спільної осі (3) синхронізують з кутовою швидкістю
компенсуючого тіла (4) навколо спільної осі (3) синхронізують з кутовою швидкістю ![]() обертання робочого тіла (1) навколо локальної осі (2) таким чином, що підтримують співвідношення
обертання робочого тіла (1) навколо локальної осі (2) таким чином, що підтримують співвідношення
![]() ,
,
де:
![]() - коефіцієнт синхронізації компенсуючого тіла (4);
- коефіцієнт синхронізації компенсуючого тіла (4);
![]() - число робочих тіл (1);
- число робочих тіл (1);
![]() - маса робочого тіла (1);
- маса робочого тіла (1);
![]() - маса кільцеподібного компенсуючого тіла (4);
- маса кільцеподібного компенсуючого тіла (4);
![]() .
.
Текст
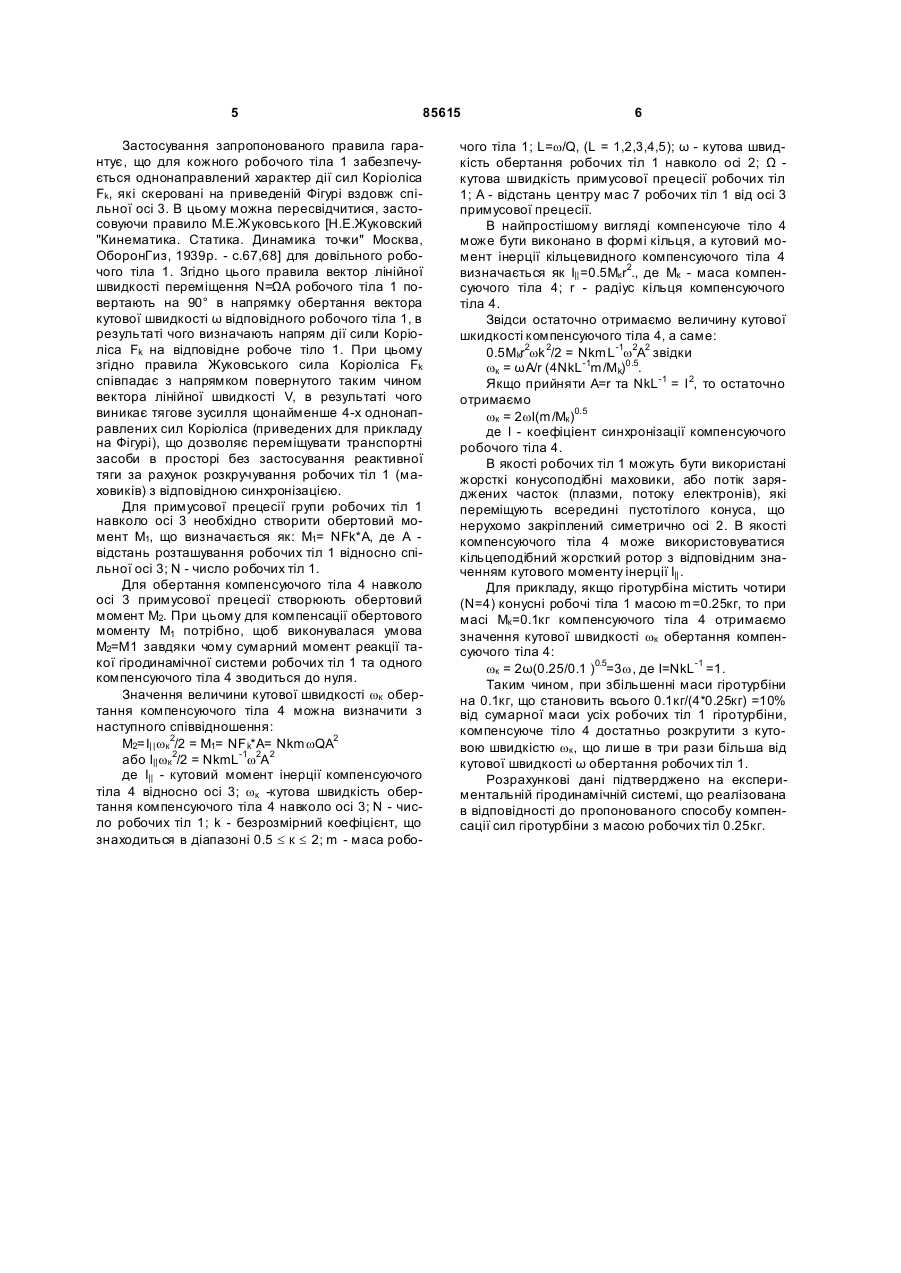
1. Спосіб компенсації сил реакції гіротурбіни з обертанням робочих тіл (1), розподілених навколо відповідних локальних осей (2), з переміщенням усі х робочих тіл (1) по замкнутій траєкторії (8) навколо спільної осі (3) примусової прецесії та з узгодженням кутової швидкості W переміщення кожного робочого тіла (1) навколо спільної осі (3) зі швидкістю ω його обертання навколо відповідної локальної осі (2), який відрізняється тим, що використовують компенсуюче тіло (4), розподілене навколо спільної осі (3) примусової прецесії, яке обертають навколо спільної осі (3) примусової прецесії в напрямку, протилежному до напрямку переміщення робочих тіл (1) навколо тієї ж спільної осі (3). 2. Спосіб за п. 1, який відрізняється тим, що кутову швидкість обертання w k компенсуючого тіла (4) навколо спільної осі (3) синхронізують з кутовою швидкістю w обертання робочого тіла (1) навколо локальної осі (2) таким чином, що підтримують співвідношення Технічне рішення належить до галузі виробництва гіродинамічних систем, зокрема до систем гіростабілізації і може бути використане для прискорення та орієнтації космічних апаратів (КА) завдяки створенню тяги однонаправлених сил Коріоліса в режимах переміщень КА, як над поверхнею планет так і у відкритому космосі. Відомий спосіб використання прискорення Коріоліса для створення тяги, оснований на використанні робочої рідини (газу), при якому робочу рідину (газ) пропускають під тиском на лопатки робочого колеса в складній послідовності, в результаті чого виникає сила Коріоліса [патент РФ №2001104255 "Способ использования ускорения Кориолиса" МКИ F03G3/00 від 2003.01.27]. Вказаний спосіб відзначається технологічною складністю та низьким ККД. Відомий також спосіб компенсації гіромоменту з обертанням робочих тіл, розподілених навколо відповідних локальних осей, та переміщенням усіх робочих тіл синхронно в одному напрямку по за мкнутій траєкторії навколо спільної осі, яка розташована поза центрами мас робочих тіл, причому швидкість V переміщення кожного робочого тіла навколо спільної осі узгоджують зі швидкістю ω обертання робочого тіла навколо локальної осі. ["Спосіб компенсації гіромоменту". Патент України на корисну модель №15765 від 20.01.2006р.]. Спосіб дає змогу отримати тягу багатьох однонаправлених сил Коріоліса, що дозволяє створити безопорний гірорушій - гіротурбіну для переміщення космічних та літальних апаратів без використання реактивної тяги чи пропелерів. Найбільш близьким за технічною суттю є спосіб узгодження сил Коріоліса з обертанням робочих тіл, розподілених навколо відповідних локальних осей, з переміщенням усіх робочих тіл по замкнутій траєкторії навколо спільної осі та з узгодженням швидкості V переміщення кожного робочого тіла навколо спільної осі зі швидкістю ω обертання кожного робочого тіла навколо відповідної локальної осі, в якому використовують парне чис wk = 2wI( m / M k ) 0, 5 , де: - коефіцієнт синхронізації компен суючого тіла (4); N - число робочих тіл (1); m - маса робочого тіла (1); Mk - маса кільцеподібного компенсуючого тіла (4); (19) UA (11) 85615 (13) L = w / W ; k = 0,5...2 . C2 I = ( NkL-1 ) 0, 5 3 85615 ло робочих тіл; усі робочі тіла розподіляють на рівні групи; першу гр упу робочих тіл обертають навколо спільної осі в напрямку проти годинникової стрілки, а другу гр упу робочих тіл обертають навколо спільної осі в протилежному напрямку ["Спосіб узгодження сил Коріоліса". Патент України на корисну модель №19713 від 31.07.2006р.]. Недоліком відомого способу є його технологічна складність, яка полягає в тому, що потрібно використовува ти щонайменше дві групи робочих тіл, які обертаються навколо спільної осі примусової прецесії в протилежних напрямках. Це зумовлює складність процесів синхронізації двох гр уп робочих тіл відомого способу при його технічній реалізації, які виконують функції створення тяги шляхом генерування багатьох однонаправлених сил Коріоліса. Метою запропонованого технічного рішення є спрощення способу компенсації моменту реакції при використанні однієї групи робочих тіл. З цією метою в способі з обертанням робочих тіл, розподілених навколо відповідних локальних осей, з переміщенням усіх робочих тіл по замкнутій траєкторії навколо спільної осі примусової прецесії та з узгодженням кутової швидкості Ω переміщення кожного робочого тіла навколо спільної осі зі швидкістю ω його обертання навколо відповідної локальної осі, згідно пропозиції, використовують компенсуюче тіло, розподілене навколо спільної осі примусової прецесії, яке обертають навколо спільної осі примусової прецесії в напрямку протилежному до напрямку переміщення робочих тіл навколо тієї ж спільної осі. Крім того, згідно пропозиції, кутову швидкість обертання ωκ компенсуючого тіла навколо спільної осі синхронізують з кутовою швидкістю обертання ω робочого тіла навколо локальної осі таким чином, що підтримують співвідношення wк = 2wI(m/Мк )0.5 де I=(NkL-1)0.5 -коефіцієнт синхронізації компенсуючого тіла; N - число робочих тіл (1); m - маса робочого тіла (1); Мк - маса кільцевидного компенсуючого тіла (4);L=w/W; k=0.5...2. Між досягнутою метою та технічною суттю існує безпосередній причинно-наслідковий зв’язок. Момент реакції, який переборює рушій в процесі переміщення робочих тіл навколо спільної осі примусової прецесії при реалізації відомого способу направлений в протилежному напрямку по відношенню до напрямку їх примусової прецесії. Якщо встановити компенсуюче тіло та розкрутити його від того ж рушія в напрямку, протилежному до напрямку переміщення (примусової прецесії) робочих тіл навколо спільної осі, то в цьому випадку момент реакції, що супроводжує розкручування компенсуючого тіла буде протилежним моменту реакції, що супроводжує примусову прецесію робочих тіл. Це дозволяє звести сумарний момент реакції до нуля за рахунок обертання робочих тіл та компенуючого тіла в протилежних напрямках навколо спільної осі примусової прецесії та суттєво спростити технічну реалізацію пропонованого способу. 4 На Фігурі показана схема, що пояснює суть пропонованого рішення. Запропонований спосіб на приведеній Фігурі реалізують за допомогою робочих тіл 1, які обертають навколо відповідних локальних осей 2 з кутовою швидкістю ω кожне. Усі робочі тіла 1 переміщують навколо спільної осі 3, наприклад, в напрямку проти годинникової стрілки з кутовою швидкістю Ω примусової прецесії (якщо дивитись вверх з точки Q1 перетину локальної 2 та спільної 3 осей). Компенсуюче тіло 4 розподіляють навколо тієї ж спільної осі 3 та обертають в протилежному напрямку за годинниковою стрілкою з кутовою швидкістю ωκ. Кутова швидкість примусової прецесії Ω робочих тіл 1 синхронізують з їх кутовою швидкістю ω обертання навколо відповідних локальних осей 2 таким чином, що підтримують співвідношення L=ω/Ω, де L = 1,2,3,4,5 і т.п. - ціле число, Відстань А розташування робочих тіл 1 відносно спільної осі 3 узгоджують з кутовою швидкістю ω їх обертання навколо відповідних локальних осей 2. Локальні осі 2 робочих тіл 1 розташовують з можливістю підтримання постійного та фіксованого кута ψ між спільною віссю 3 примусової прецесії та локальною віссю 2. Кут ψ розташований в вертикальній площині 5. При цьому локальні осі 2 розташовують на конусній поверхні 6, що заштрихована на Фігурі радіальними лініями. В найпростішому випадку локальні осі 2 обертання робочих тіл 1 розташовують на одинаковій кутовій відстані (90°) одна від одної в горизонтальній площині. Спосіб компенсації сил реакції на Фігурі застосовують наступним чином. При обертанні робочих тіл 1 з кутовою швидкістю ω навколо відповідних локальних осей 2 з одночасною примусовою прецесією навколо спільної осі 3 центри їх мас 7 рухаються по круговій траєкторії 8 з кутовою швидкістю примусової прецесії Ω. На кожне робоче тіло 1 діє сила Коріоліса Fk, що визначається як Fk = kmwV = kmωΩΑ, де m - маса робочого тіла 1; к - безрозмірний коефіцієнт, що враховує параметри (розміри та форму) робочого тіла 1, та умови синхронізації частоти обертання ω з частотою Ω примусової прецесії; А - відстань розташування центрів мас 7 робочих тіл 1 від спільної осі 3; V - лінійна швидкість примусової прецесії робочого тіла по круговій траєкторії 8. Для забезпечення однонаправленого характеру усі х сил Коріоліса Fk робочих тіл 1 використовують запропоноване автором правило, за яким вектор кутової швидкості примусової прецесії Ω умовно повертають (наприклад, по траєкторії 9) навколо точки перетину Q1 локальної 2 і спільною 3 осей та суміщують з відповідною локальною віссю 2 (проміжне положення вектору показане на Фігурі пунктиром та позначене як Ω'), а напрям обертання робочого тіла 1 навколо локальної осі 2 вибирають таким чином, що напрям вектора кутової швидкості ω співпадає з напрямком повернутого вектора Ω'. При використанні запропонованого правила усі вектори ω кутової швидкості обертання робочих тіл 1 направлені від точки Q1 перетину осей 2 та 3 назовні, тобто мають відцентровий характер. 5 85615 Застосування запропонованого правила гарантує, що для кожного робочого тіла 1 забезпечується однонаправлений характер дії сил Коріоліса Fk, які скеровані на приведеній Фігурі вздовж спільної осі 3. В цьому можна пересвідчитися, застосовуючи правило М.Е.Жуковського [Н.Е.Жуковский "Кинематика. Статика. Динамика точки" Москва, ОборонГиз, 1939р. - с.67,68] для довільного робочого тіла 1. Згідно цього правила вектор лінійної швидкості переміщення Ν=ΩΑ робочого тіла 1 повертають на 90° в напрямку обертання вектора кутової швидкості ω відповідного робочого тіла 1, в результаті чого визначають напрям дії сили Коріоліса Fk на відповідне робоче тіло 1. При цьому згідно правила Жуковського сила Коріоліса Fk співпадає з напрямком повернутого таким чином вектора лінійної швидкості V, в результаті чого виникає тягове зусилля щонайменше 4-х однонаправлених сил Коріоліса (приведених для прикладу на Фігурі), що дозволяє переміщувати транспортні засоби в просторі без застосування реактивної тяги за рахунок розкручування робочих тіл 1 (маховиків) з відповідною синхронізацією. Для примусової прецесії групи робочих тіл 1 навколо осі 3 необхідно створити обертовий момент М1, що визначається як: M1= NFk*A, де А відстань розташування робочих тіл 1 відносно спільної осі 3; N - число робочих тіл 1. Для обертання компенсуючого тіла 4 навколо осі 3 примусової прецесії створюють обертовий момент М2. При цьому для компенсації обертового моменту М1 потрібно, щоб виконувалася умова М2=М1 завдяки чому сумарний момент реакції такої гіродинамічної системи робочих тіл 1 та одного компенсуючого тіла 4 зводиться до нуля. Значення величини кутової швидкості wк обертання компенсуючого тіла 4 можна визначити з наступного співвідношення: М2=І| | wк 2/2 = М1= NF k*A= NkmwQA2 або І|| wк 2/2 = NkmL -1w2А2 де І|| - кутовий момент інерції компенсуючого тіла 4 відносно осі 3; wк -кутова швидкість обертання компенсуючого тіла 4 навколо осі 3; N - число робочих тіл 1; k - безрозмірний коефіцієнт, що знаходиться в діапазоні 0.5 £ к £ 2; m - маса робо 6 чого тіла 1; L=w/Q, (L = 1,2,3,4,5); ω - кутова швидкість обертання робочих тіл 1 навколо осі 2; Ω кутова швидкість примусової прецесії робочих тіл 1; А - відстань центру мас 7 робочих тіл 1 від осі 3 примусової прецесії. В найпростішому вигляді компенсуюче тіло 4 може бути виконано в формі кільця, а кутовий момент інерції кільцевидного компенсуючого тіла 4 визначається як І|| =0.5Мк r2., де Мк - маса компенсуючого тіла 4; r - радіус кільця компенсуючого тіла 4. Звідси остаточно отримаємо величину кутової шкидкості компенсуючого тіла 4, а саме: 0.5Mkr2wk 2/2 = NkmL -1w2A2 звідки wк = ωΑ/r (4NkL-1m/Mk)0.5. Якщо прийняти А=r та NkL-1 = І 2, то остаточно отримаємо wк = 2wІ(m/Мк )0.5 де І - коефіціент синхронізації компенсуючого робочого тіла 4. В якості робочих тіл 1 можуть бути використані жорсткі конусоподібні маховики, або потік заряджених часток (плазми, потоку електронів), які переміщують всередині пустотілого конуса, що нерухомо закріплений симетрично осі 2. В якості компенсуючого тіла 4 може використовуватися кільцеподібний жорсткий ротор з відповідним значенням кутового моменту інерції І|| . Для прикладу, якщо гіротурбіна містить чотири (N=4) конусні робочі тіла 1 масою m=0.25кг, то при масі Мк =0.1кг компенсуючого тіла 4 отримаємо значення кутової швидкості wк обертання компенсуючого тіла 4: wк = 2ω(0.25/0.1 )0.5=3w, де I=NkL -1 =1. Таким чином, при збільшенні маси гіротурбіни на 0.1кг, що становить всього 0.1кг/(4*0.25кг) =10% від сумарної маси усіх робочих тіл 1 гіротурбіни, компенсуюче тіло 4 достатньо розкрутити з кутовою швидкістю wк , що ли ше в три рази більша від кутової швидкості ω обертання робочих тіл 1. Розрахункові дані підтверджено на експериментальній гіродинамічній системі, що реалізована в відповідності до пропонованого способу компенсації сил гіротурбіни з масою робочих тіл 0.25кг. 7 Комп’ютерна в ерстка Л. Купенко 85615 8 Підписне Тираж 28 прим. Міністерство осв іт и і науки України Держав ний департамент інтелектуальної в ласності, вул. Урицького, 45, м. Київ , МСП, 03680, Україна ДП “Український інститут промислов ої в ласності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for compensation of reaction forces of gyro-turbine
Автори англійськоюLykhovyd Yurii Makarovych
Назва патенту російськоюСпособ компенсации сил реакции гиротурбины
Автори російськоюЛиховид Юрий Макарович
МПК / Мітки
МПК: B64G 1/28, G01C 19/00
Мітки: гіротурбіни, спосіб, реакції, компенсації, сіль
Код посилання
<a href="https://ua.patents.su/4-85615-sposib-kompensaci-sil-reakci-giroturbini.html" target="_blank" rel="follow" title="База патентів України">Спосіб компенсації сил реакції гіротурбіни</a>
Спосіб компенсації сил гіроскопічного моменту
Номер патенту: 24572
Опубліковано: 10.07.2007
Автор: Лиховид Юрій Макарович
МПК: B64G 1/28, G01C 19/00
Мітки: компенсації, гіроскопічного, спосіб, моменту, сіль
Формула / Реферат:
1. Спосіб компенсації сил гіроскопічного моменту з обертанням робочого тіла (1) навколо локальної осі (5), з одночасним переміщенням робочого тіла (1) по замкнутій траєкторії (6) навколо осі примусової прецесії (4) та з узгодженням кутової швидкості Ω прецесії робочого тіла (1) з кутовою швидкістю ω обертання робочого тіла (1) навколо локальної осі (5), який відрізняється тим, що локальну вісь (5) обертання робочого тіла (1)...
Спосіб компенсації гіромоменту
Номер патенту: 15765
Опубліковано: 17.07.2006
Автор: Лиховид Юрій Макарович
МПК: B64G 1/28, G01C 19/00
Мітки: гіромоменту, спосіб, компенсації
Формула / Реферат:
1. Спосіб компенсації гіромоменту з обертанням робочого тіла навколо локальної осі з одночасним його переміщенням, який відрізняється тим, що обертають декілька додаткових робочих тіл, розподілених навколо відповідних локальних осей і переміщують усі робочі тіла по замкнутій траєкторії навколо спільної осі, яка розташована поза центрами мас робочих тіл.2. Спосіб за п. 1, який відрізняється тим, що робочі тіла примусово...
Спосіб узгодження сил коріоліса
Номер патенту: 19713
Опубліковано: 15.12.2006
Автор: Лиховид Юрій Макарович
МПК: G01C 19/00, B64G 1/28
Мітки: спосіб, коріоліса, сіль, узгодження
Формула / Реферат:
1. Спосіб узгодження сил Коріоліса, що включає обертання робочих тіл (1а, 16), розподілених навколо відповідних локальних осей (2а, 2б), переміщення усіх робочих тіл по замкнутій траєкторії (5, 7) навколо спільної осі (3) та узгодження швидкості V переміщення кожного робочого тіла (1а, 16) навколо спільної осі (3) зі швидкістю ω обертання кожного робочого тіла (1а, 16) навколо відповідної локальної осі (2а, 2б), який відрізняється тим,...
Спосіб розподілу сил коріолісових
Номер патенту: 84200
Опубліковано: 25.09.2008
Автор: Лиховид Юрій Макарович
МПК: G01C 19/00, B64G 1/28
Мітки: спосіб, сіль, коріолісових, розподілу
Формула / Реферат:
1. Спосіб розподілу сил коріолісових шляхом обертання робочого тіла (1) навколо локальної осі (2), переміщення робочого тіла по замкнутій траєкторії (3) навколо осі примусової прецесії (4) та узгодження швидкості переміщення робочого тіла (1) навколо осі (4) примусової прецесії зі швидкістю обертання...
Спосіб використання тягового зусилля коріоліса (варіанти)
Номер патенту: 80211
Опубліковано: 27.08.2007
Автор: Лиховид Юрій Макарович
МПК: G01C 19/00, B64G 1/28
Мітки: використання, зусилля, коріоліса, спосіб, тягового, варіанти
Формула / Реферат:
1. Спосіб використання тягового зусилля Коріоліса з обертанням першого (1) та другого (2) маховиків навколо відповідних локальних осей (2, 5) та з обертанням другого маховика (4) в напрямку, протилежному до напрямку обертання першого маховика (1), з переміщенням маховиків (1, 4) по замкнутій траєкторії (6) навколо спільної осі прецесії, що розташована поза центрами мас (8, 9) маховиків, який відрізняється тим, що кут нахилу ψ локальних...
Попередній патент: Свинцево-кислотний акумулятор
Наступний патент: Обертовий інформаційний пристрій
Випадковий патент: Пристрій для розвантаження матеріалу із стрічкового конвейєра