Маніпулятор для реабілітації рухових здатностей осіб з недорозвиненими нижніми кінцівками
Формула / Реферат
1. Маніпулятор для реабілітації рухових здатностей осіб з недорозвиненими нижніми кінцівками, який відрізняється тим, що оснащений ходовим колесом з напрямними (19), на яких з можливістю переміщення розміщена каретка (16), що приводиться в рух за допомогою тяги (20), та приводним вузлом (7), на валу якого встановлений важіль, з'єднаний з датчиком зусилля (10), що своїм другим кінцем з'єднаний за допомогою кульового шарніра (2) з важелем (11), що з іншої сторони з'єднаний з кареткою (16), при цьому на каретці (16) встановлена підстава (5) з можливістю переміщення, до якої прикріплена педаль (4), а між підставою (5) і кареткою (16) розміщено датчик зусилля (3) за допомогою важеля, один кінець якого з'єднаний з кульовим шарніром (17), другий кінець - з датчиком зусилля (18), що з іншої сторони з'єднаний з важелем (15), з'єднаним з валом приводного вузла (12), закріпленого на підставі (5) за допомогою сполучного елемента (13).
2. Маніпулятор за п. 1, який відрізняється тим, що один ролик тягової напрямної (20) вільно розміщений на валу, встановленому на підставі (22), а другий ролик для приводу тяги (20) встановлений на валу приводного вузла (1).
3. Маніпулятор за п. 1, який відрізняється тим, що тяга (20) виконана у вигляді зубчастого ременя.
Текст
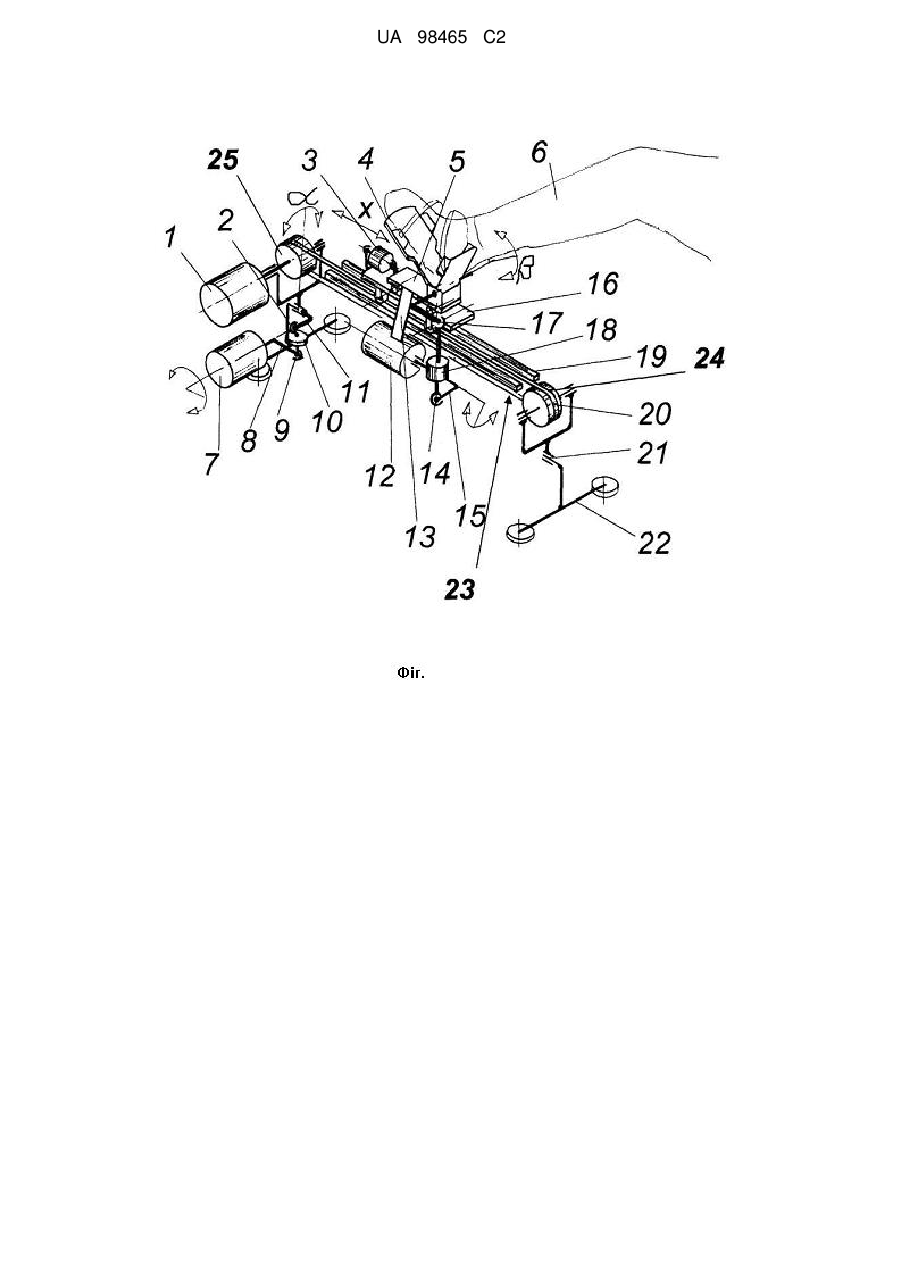
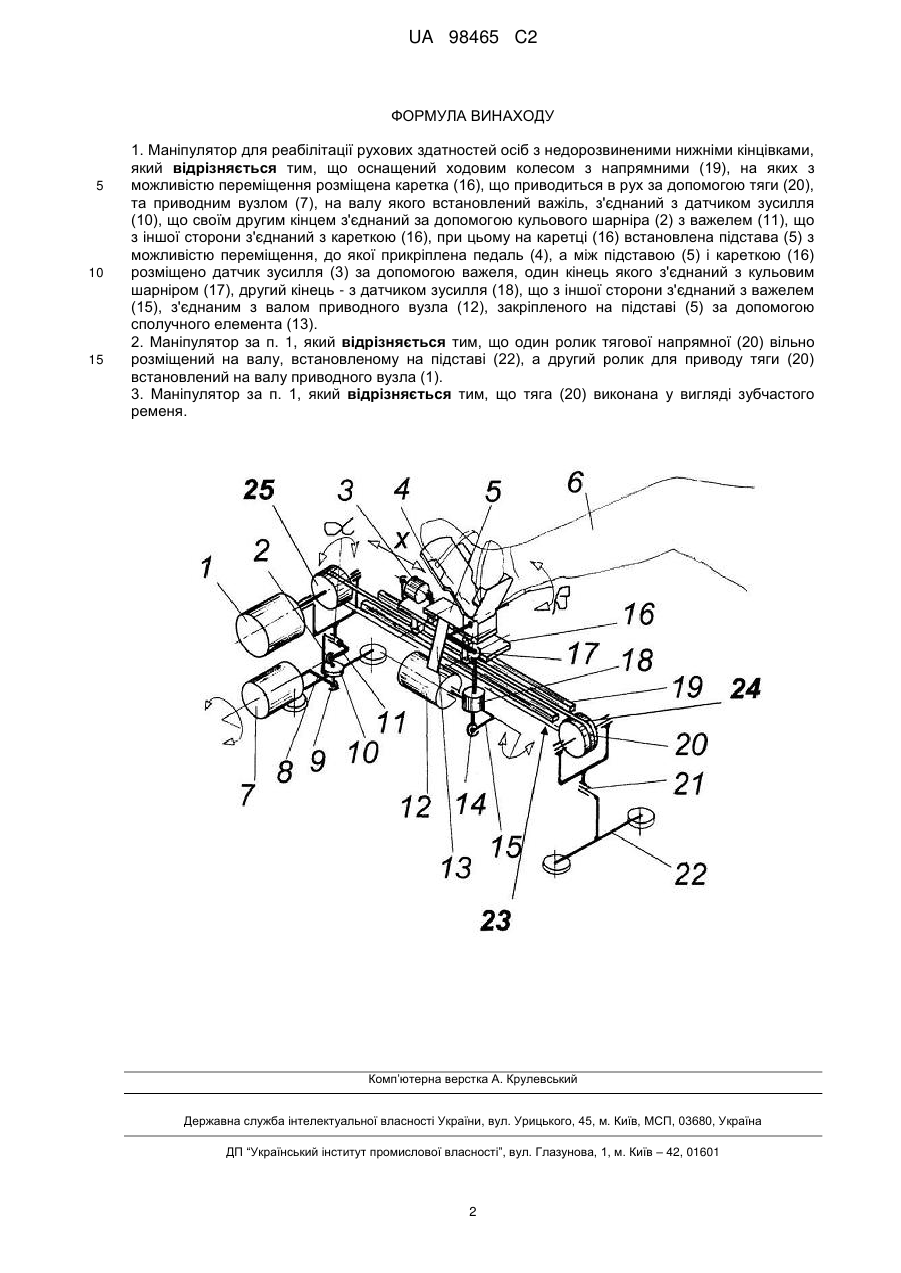
Реферат: Маніпулятор для реабілітації рухових здатностей осіб з недорозвиненими нижніми кінцівками, зокрема осіб із частковою однобічною поразкою нижніх кінцівок, оснащений ходовим колесом з напрямними (19), на яких з можливістю переміщення розміщена каретка (16), що приводиться в рух за допомогою тяги (20), та приводним вузлом (7), на валу якого встановлений важіль, з'єднаний з датчиком зусилля (10), що своїм другим кінцем з'єднаний за допомогою кульового шарніра (2) з важелем (11), що з іншої сторони з'єднаний з кареткою (16), при цьому на каретці (16) встановлена підстава (5) з можливістю переміщення, до якої прикріплена педаль (4), а між підставою (5) і кареткою (16) розміщено датчик зусилля (3) за допомогою важеля, один кінець якого з'єднаний з кульовим шарніром (17), другий кінець - з датчиком зусилля (18), що з іншої сторони з'єднаний з важелем (15), з'єднаним з валом приводного вузла (12), закріпленого на підставі (5) за допомогою сполучного елемента (13). UA 98465 C2 (12) UA 98465 C2 UA 98465 C2 5 10 15 20 25 30 35 40 45 50 55 Предметом винаходу є маніпулятор для реабілітації рухових здатностей осіб з недорозвиненими нижніми кінцівками, зокрема осіб із частковою однобічною поразкою нижніх кінцівок. З опису до патенту США АР № 6821233 відомий пристрій для терапії рухових функцій пацієнтів із частковим паралічем кінцівок. Відомий пристрій оснащений біговою доріжкою, на якій пацієнт виконує задані рухи. Пристрій оснащений також механізмом керування із приводом, що керує кінцівками пацієнта відповідно до заданого шаблону. Конструкція пристосування дозволяє робити його настроювання залежно від росту і ваги пацієнта. Такого роду пристрої випускаються швейцарською фірмою ХОКОМА АГ і пропонуються на ринку під торговельним найменуванням Lokomat. Відомі також широко використовувані в медичній практиці пристрої для реабілітації рухових здатностей пацієнтів з недорозвиненими нижніми кінцівками, які забезпечують можливість виконання рухів, аналогічних рухам при їзді на велосипеді. Це, в основному, рухи в одній площині, що обумовлено конструкцією механізму. Задачею винаходу є створення маніпулятора для початкової реабілітації осіб, які в результаті перенесених захворювань втратили рухову здатність нижніх кінцівок, зокрема осіб із частковим паралічем нижніх кінцівок. Запропонований маніпулятор, відповідно до винаходу, оснащений ходовим колесом з напрямними, на яких з можливістю переміщення розміщена каретка із приводною тягою, а також приводним вузлом, на валу якого закріплений важіль, одним кінцем з'єднаний з датчиком зусилля, що іншим кінцем за допомогою кульового шарніра з'єднаний з важелем, що з іншої сторони з'єднаний з кареткою, при цьому на каретці розміщена рухлива підстава, на якій закріплена педаль, а між підставою і кареткою встановлений датчик зусилля, при цьому педаль закріплена на підставі за допомогою важеля, один кінець якого з'єднаний з кульовим шарніром, інший кінець - із датчиком зусилля, з іншої сторони з'єднаний з важелем, що, у свою чергу, з'єднаний з валом приводного вузла, закріпленого на підставі за допомогою сполучного елемента. Один ролик напрямної тяги вільно розміщений на валу, встановленому на підставі, а другий ролик, призначений для приводу тяги, розміщений на валу вузла привода. Тягу доцільно виконати у вигляді зубчастого ременя. Суть винаходу пояснюється кресленням, на якому представлена принципова кінематична схема маніпулятора. Маніпулятор оснащений ходовим колесом 23 з напрямними 19, на яких з можливістю переміщення розміщена каретка 16. Каретка 16 з'єднана з тягою 20, виконаною, переважно, у вигляді зубчастого ременя. Тяга 20 розміщена на двох роликах 24, 25, при цьому ролик 25 стаціонарно закріплений на валу приводного вузла 1. Інший ролик 24 розташований на валу, що вільно встановлений на підставі 22, і розташований із протилежної сторони ходового колеса щодо ролика 25, розміщеного на валу приводного вузла 1. На каретці 16 розміщена, з можливістю переміщення, підстава 5. На підставі 5 на осі закріплена педаль 4 для пацієнта, що може виконувати кутові рухи. Підстава 5 з'єднана з кареткою 16 за допомогою датчика зусилля 3 таким чином, що один кінець датчика зусилля 3 прикріплений до каретки 16, а другий його кінець - до підстави 5. Датчик зусилля 3 вимірює величину зусилля впливу стопи пацієнта 6 на каретку 16 при виконанні руху щодо осі х. Вісь обертання педалі 4 з'єднана з важелем, що закінчується кульовим шарніром 17. Інший кінець кульового шарніра 17 з'єднаний з датчиком зусилля 18, що вимірює зусилля впливу стопи пацієнта 6 на маніпулятор при виконанні кутового руху . Другий кінець датчика зусилля 18 з'єднаний з важелем 15, встановленим на валу приводного вузла 12. Приводний вузол 12 викликає кутовий рух педалі 4, а датчик 18 забезпечує можливість виміру зусилля впливу стопи на маніпулятор при виконанні цього руху. Приводний вузол 12 закріплений на підставі 5 за допомогою сполучного елемента 13. Крім того, маніпулятор оснащений приводним вузлом 7, що забезпечує нахил ходового колеса каретки 16 на кут . На валу приводного вузла 7 встановлений важіль 8, на кінці якого є кульовий шарнір 9. Другий кінець кульового шарніра 9 з'єднаний з датчиком зусилля 10. Датчик зусилля 10 своїм другим кінцем з'єднаний з кульовим шарніром 2, встановленим на важелі 11, з'єднаним з ходовим колесом 23 каретки 16. Датчик 10 забезпечує можливість виміру зусилля впливу кінцівки пацієнта 6 на маніпулятор при виконанні руху нахилу кінцівки на кут . На підставі сигналів датчиків зусилля 10 і 18 забезпечується можливість узгодження параметрів маніпулятора з можливостями пацієнта 6. Запропонований маніпулятор, відповідно до винаходу, забезпечує можливість виконання рухів як в одній площині, так і просторових рухів, а також дозволяє виконувати зміни настроювання при виконанні рухових вправ. 60 1 UA 98465 C2 ФОРМУЛА ВИНАХОДУ 5 10 15 1. Маніпулятор для реабілітації рухових здатностей осіб з недорозвиненими нижніми кінцівками, який відрізняється тим, що оснащений ходовим колесом з напрямними (19), на яких з можливістю переміщення розміщена каретка (16), що приводиться в рух за допомогою тяги (20), та приводним вузлом (7), на валу якого встановлений важіль, з'єднаний з датчиком зусилля (10), що своїм другим кінцем з'єднаний за допомогою кульового шарніра (2) з важелем (11), що з іншої сторони з'єднаний з кареткою (16), при цьому на каретці (16) встановлена підстава (5) з можливістю переміщення, до якої прикріплена педаль (4), а між підставою (5) і кареткою (16) розміщено датчик зусилля (3) за допомогою важеля, один кінець якого з'єднаний з кульовим шарніром (17), другий кінець - з датчиком зусилля (18), що з іншої сторони з'єднаний з важелем (15), з'єднаним з валом приводного вузла (12), закріпленого на підставі (5) за допомогою сполучного елемента (13). 2. Маніпулятор за п. 1, який відрізняється тим, що один ролик тягової напрямної (20) вільно розміщений на валу, встановленому на підставі (22), а другий ролик для приводу тяги (20) встановлений на валу приводного вузла (1). 3. Маніпулятор за п. 1, який відрізняється тим, що тяга (20) виконана у вигляді зубчастого ременя. Комп’ютерна верстка А. Крулевський Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 2
ДивитисяДодаткова інформація
Назва патенту англійськоюManipulating instrument for the recovery of locomotor abilities in individuals with defective lower limbs
Автори англійськоюKlimasara Wojciech
Назва патенту російськоюМанипулятор для реабилитации двигательных способностей лиц с недоразвитыми нижними конечностями
Автори російськоюКлимасара Войцех
МПК / Мітки
МПК: A63B 21/00, A63B 23/04, A61H 1/02
Мітки: кінцівками, рухових, маніпулятор, здатностей, недорозвиненими, нижніми, осіб, реабілітації
Код посилання
<a href="https://ua.patents.su/4-98465-manipulyator-dlya-reabilitaci-rukhovikh-zdatnostejj-osib-z-nedorozvinenimi-nizhnimi-kincivkami.html" target="_blank" rel="follow" title="База патентів України">Маніпулятор для реабілітації рухових здатностей осіб з недорозвиненими нижніми кінцівками</a>
Маніпулятор для реабілітації осіб з недорозвиненими в русі кінцівками
Номер патенту: 94411
Опубліковано: 10.05.2011
Автор: Клімасара Войцєх
МПК: B25J 5/00, B25J 15/00, A61H 99/00, B25J 13/00
Мітки: маніпулятор, кінцівками, осіб, недорозвиненими, русі, реабілітації
Формула / Реферат:
1. Маніпулятор для реабілітації осіб з недорозвиненими в русі кінцівками, зокрема нижніми кінцівками, оснащений системою керування, розміщеною у шафі керування, установленій на підставі, що складається з кронштейна (15), з'єднаного одним кінцем з валом системи приводу (16), а іншим кінцем із другим кронштейном (14), який в свою чергу з'єднаний з валом системи приводу (9), при цьому вали систем приводу (9, 16) розташовані на одній осі, а...
Маніпулятор
Номер патенту: 9564
Опубліковано: 17.10.2005
Автори: Бергер Еміль Григорович, Іванов Геннадій Олександрович, Бергер Євгеній Емильович, Табацков Вячеслав Петрович
МПК: B25J 11/00
Мітки: маніпулятор
Формула / Реферат:
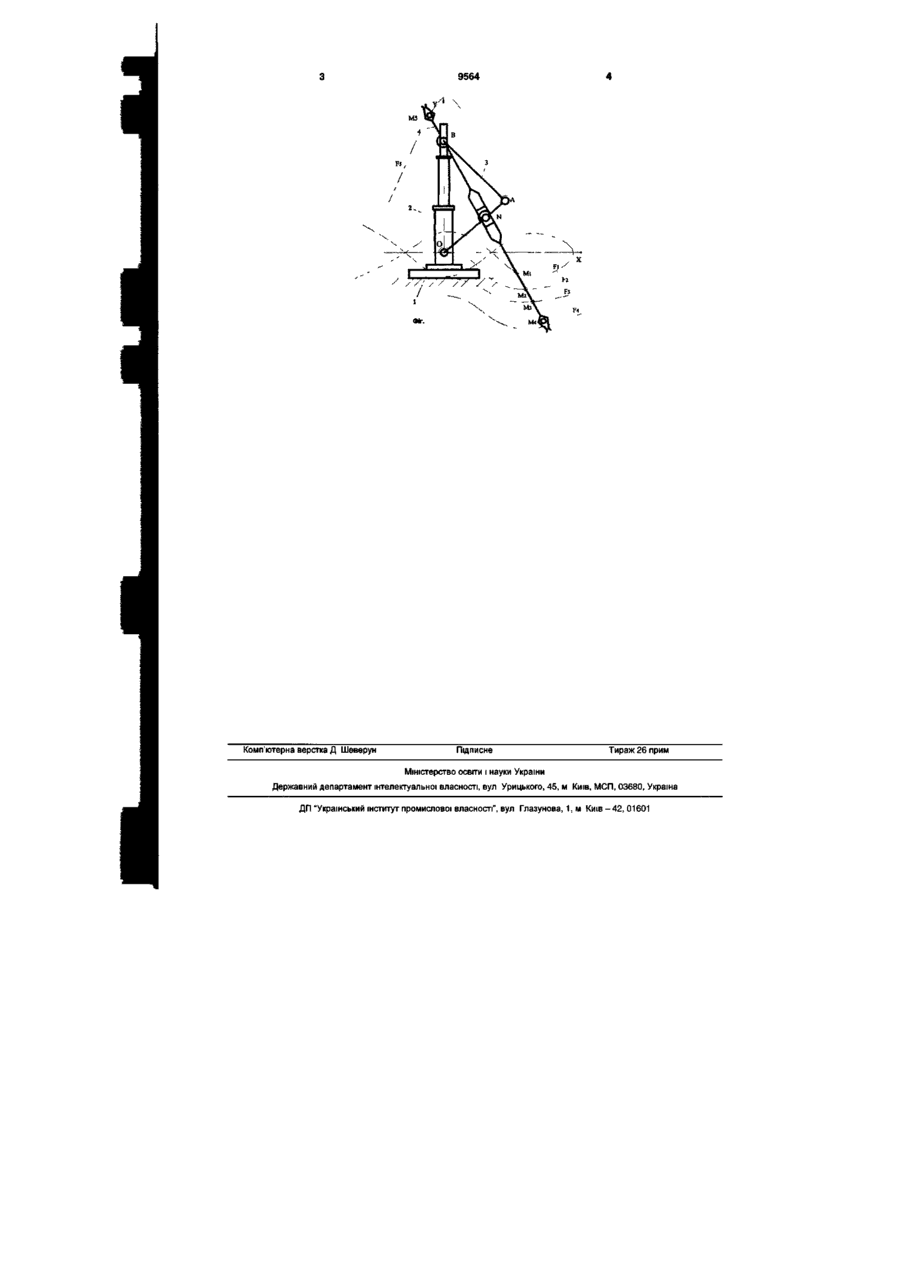
Маніпулятор, який має основу з силовим циліндром та захоплювач руки робота, який відрізняється тим, що він обладнаний кривошипно-шатунним механізмом, ланки якого шарнірно закріплені до штока корпусу силового циліндра кулісою, яка оснащена розмічальними штифтами.
Спосіб комплексної реабілітації осіб з обмеженими фізичними можливостями
Номер патенту: 49976
Опубліковано: 25.05.2010
Автори: Дубельт Ольга Ярославівна, Татарінов Борис Глібович, Тишкун Одарка Михайлівна, Любіжанін Уляна Павлівна, Дунас Григорій Григорович, Іваськевич Мирослав Іванович
МПК: A61H 99/00
Мітки: осіб, фізичними, обмеженими, комплексної, можливостями, спосіб, реабілітації
Формула / Реферат:
Спосіб комплексної реабілітації осіб з обмеженими фізичними властивостями, згідно з яким проводять фізичну, фізкультурно-спортивну реабілітацію, який відрізняється тим, що додатково проводять соціальну, психологічну, психолого-педагогічну, медичну, професійну, а паралельно фізичну, фізкультурно-спортивну та трудову реабілітації, які здійснюють поетапно, що передбачають діагностичний, адаптаційний, контрольно-корекційний, стабілізаційний та...
Спосіб медичної реабілітації осіб, які перехворіли на первинну бешиху
Номер патенту: 50474
Опубліковано: 15.10.2002
Автори: Старік Анатолій Данилович, Зельоний Ігор Іванович, Фролов Валерій Мітрофанович
МПК: A61P 27/14, A61K 36/185
Мітки: медичної, реабілітації, первинну, перехворіли, спосіб, бешиху, осіб
Формула / Реферат:
Спосіб медичної реабілітації осіб, які перехворіли на первинну бешиху, що включає введення імуноактивного препарату, який відрізняється тим, що додатково як імуноактивний препарат вводять манакс у вигляді таблеток усередину по 90 мг 3 рази на день протягом 20-30 діб поспіль.
Спосіб реабілітації осіб з поєднаними ураженнями нервової системи і опорно-рухового апарата
Номер патенту: 59146
Опубліковано: 15.08.2003
Автор: Холодов Сергій Анатолійович
МПК: A61H 3/00
Мітки: опорно-рухового, реабілітації, спосіб, ураженнями, нервової, апарата, поєднаними, системі, осіб
Формула / Реферат:
Спосіб реабілітації осіб з поєднаними ураженнями нервової системи і опорно-рухового апарата в контексті формування і відновлення навичок ходьби, що включає обстеження пацієнта, застосування лікувальної фізкультури та корекційної педагогіки, який відрізняється тим, що в залежності від результату обстеження підбирають необхідні для реабілітації опорні пристосування згідно з розробленою класифікаційною таблицею.
Попередній патент: Рама ходової частини рейкового транспортного засобу
Наступний патент: Комбінація інгібітора нmg-cоa-редуктази й інгібітора фосфодіестерази 4, призначена для лікування запальних захворювань легенів
Випадковий патент: Аплікаторний пристрій для фізіо - і рефлексотерапії