Маніпулятор для реабілітації осіб з недорозвиненими в русі кінцівками

Формула / Реферат
1. Маніпулятор для реабілітації осіб з недорозвиненими в русі кінцівками, зокрема нижніми кінцівками, оснащений системою керування, розміщеною у шафі керування, установленій на підставі, що складається з кронштейна (15), з'єднаного одним кінцем з валом системи приводу (16), а іншим кінцем із другим кронштейном (14), який в свою чергу з'єднаний з валом системи приводу (9), при цьому вали систем приводу (9, 16) розташовані на одній осі, а системи приводу (9, 16) прикріплені до каретки (8), сполученої з баластом (3), розміщеним на напрямних (2), з'єднаних з вертикальної стійкою (7), розташованих одна навпроти одної по обидва боки вертикальної стійки (2) та на яких установлена каретка (8) з можливістю переміщення на цих напрямних (2) за допомогою приводних ланцюгів (6), що приводяться в рух через зубчасті колеса (5) системи приводу (4), розміщеного у верхній частині вертикальної стійки (7), при цьому ланцюги (6) надіті на зірочки (18), які розміщені в нижній частині вертикальної стійки (7) і призначені для натягу ланцюгів (6).
2. Маніпулятор за п. 1, який відрізняється тим, що кронштейни (14, 15) маніпулятора з'єднані між собою за допомогою затискної муфти (21).
3. Маніпулятор за п. 1, який відрізняється тим, що каретка (8) і баласт (3) оснащені ходовими роликами (19).
4. Маніпулятор за п. 1, який відрізняється тим, що підставу (17) оснащено ходовими штифтами (23).
5. Маніпулятор за п. 1, який відрізняється тим, що підставу (17) оснащено лапками (22).
Текст
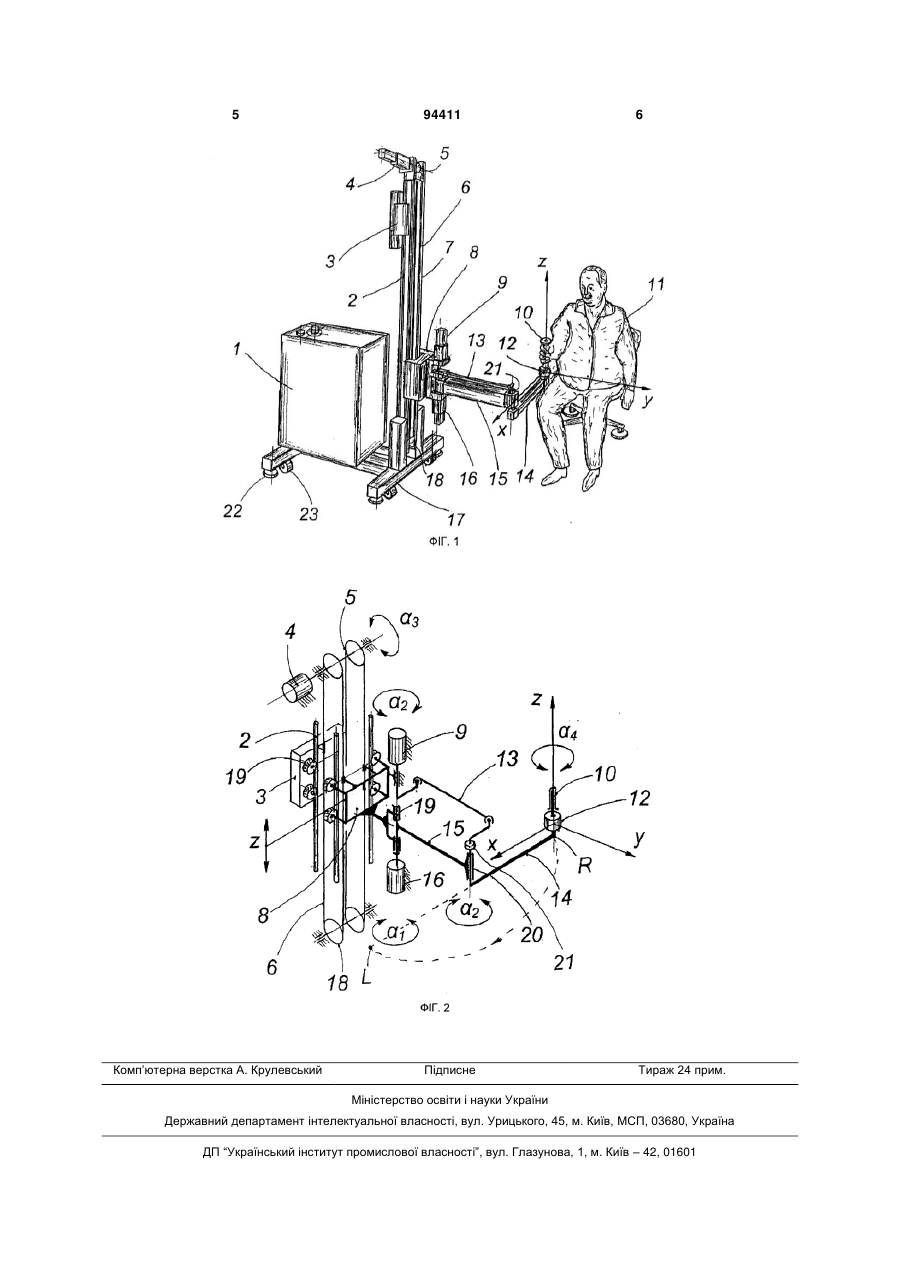
1. Маніпулятор для реабілітації осіб з недорозвиненими в русі кінцівками, зокрема нижніми кінцівками, оснащений системою керування, розміщеною у шафі керування, установленій на підставі, що складається з кронштейна (15), з'єднаного одним кінцем з валом системи приводу (16), а іншим кінцем із другим кронштейном (14), який в свою чергу з'єднаний з валом системи приводу (9), при цьому вали систем приводу (9, 16) розташовані на одній осі, а системи приводу (9, 16) прикрі C2 2 (19) 1 3 цьому зв'язку має місце потреба в маніпуляторах, які забезпечують можливість реалізації просторових рухів, що відповідають завданням реабілітації пацієнтів. Маніпулятор для реабілітації осіб з недорозвиненими в русі кінцівками, зокрема нижніми кінцівками, оснащений системою керування, розміщеною у шафі керування, установленій на підставі, що складається з кронштейна, з'єднаного одним кінцем з валом системи приводу, а іншим кінцем із другим кронштейном, який в свою чергу з'єднаний з валом системи приводу, при цьому вали систем приводу розташовані на одній осі, а системи приводу прикріплені до каретки, сполученої з баластом, розміщеним на напрямних, з'єднаних з вертикальної стійкою, розташованих одна навпроти одної по обидва боки вертикальної стійки та на яких установлена каретка з можливістю переміщення на цих напрямних за допомогою приводних ланцюгів, що приводяться в рух через зубчасті колеса системи приводу, розміщеного у верхній частині вертикальної стійки, при цьому ланцюги надіті на зірочки, які розміщені в нижній частині вертикальної стійки і призначені для натягу ланцюгів. Кронштейни маніпулятора з'єднані між собою за допомогою затискної муфти та підшипника. Каретка і баласт оснащені ходовими роликами. Підстава оснащена ходовими штифтами і/або лапками. Сутність предмету винаходу пояснюється на прикладі виконання, представленого на фігурах: На фігурі 1 показано маніпулятор для рухової реабілітації верхніх кінцівок, загальний вигляд; На фігурі 2 показано кінематична система маніпулятора для рухової реабілітації верхніх кінцівок, схематичний вигляд. Маніпулятор включає підставу 17, що оснащена лапками 22 і ходовими штифтами 23. Ходові штифти 23 дозволяють переміщення маніпулятора в довільне положення для реабілітованої особи, а лапки 22 дозволяють фіксувати положення маніпулятора. На підставі 17 розміщена шафа керування 1. На підставі 1 установлена також вертикальна стійка 2. Стійка 2 оснащена вертикальними, 94411 4 паралельними одна одної напрямними 2, каретками 8 і баластами 3. Як каретка 8, так і баласт 3 оснащені ходовими роликами 19, які забезпечують переміщення каретки 2 і баласту 3 уздовж напрямних 2. Каретка 8 і баласт 3 з'єднані між собою ланцюгами 6, які приводяться системою керування 4, розміщеною у верхній частині вертикальної стійки 7 та оснащеною зубчастими колісьми 5. Зубчасті колеса 5 призначені для приводу ланцюгів 6 і, тим самим, для переміщення каретки 8 і баласту 3 уздовж напрямних. У нижній частині стійки 7 розміщена система зірочок 18, що призначена для натягу ланцюгів 6. Баласт 3 урівноважує вагу каретки 8 і з'єднаних з нею елементів. До каретки 8 прикріплено маніпулятор, що складається із кронштейна 15 і кронштейна 14, які з'єднані один з одним за допомогою затискної муфти 21 та підшипника 20. Інший кінець кронштейна 5 маніпулятора з'єднаний з валом системи приводу 16, що прикріплений до каретки 8. Крім того, маніпулятор оснащений системою випрямлення 13, що призначена для зчеплення другого кронштейна 14 маніпулятора з валом системи приводу 9, закріпленого на каретці 8. Вали систем привода 9 і 16 розміщені на одній осі. На другому, протилежному кінці від затискної муфти 21, кінці кронштейна 14 маніпулятора закріплена рукоятка 10 і датчик 12, що призначений для реєстрації відносини зусилля і моменту сил на кронштейні 14 маніпулятора і зусилля і моменту сил на рукоятці 12, які викликані рукою реабілітованої особи 11. Зона кутових переміщень а1, а2, а3 валів систем приводу 4, 9, 16 забезпечують переміщення кінця кронштейна маніпулятора в тривимірному просторі відповідно до завдання виконуваних вправ. Затискна муфта 21 дозволяє змінювати положення кронштейну 14 для можливості виконання вправ як правою, так і лівою рукою реабілітованої особи. На відміну від відомих і використовуваних дотепер реабілітаційних пристроїв, кінематична система дозволяє виконувати примусові, викликані системою керування, рухи в трьох площинах. Датчик зусилля і моменту сил 12 дозволяє погоджувати роботу пристрою з рухом рук реабілітованої особи. 5 Комп’ютерна верстка А. Крулевський 94411 6 Підписне Тираж 24 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюManipulator for the rehabilitation of persons with motorially handicapped limbs
Автори англійськоюKlimasara Wojciech
Назва патенту російськоюМанипулятор для реабилитации лиц с недоразвитыми в движении конечностями
Автори російськоюКлимасара Войцех
МПК / Мітки
МПК: B25J 13/00, B25J 5/00, B25J 15/00, A61H 99/00
Мітки: осіб, русі, маніпулятор, кінцівками, реабілітації, недорозвиненими
Код посилання
<a href="https://ua.patents.su/3-94411-manipulyator-dlya-reabilitaci-osib-z-nedorozvinenimi-v-rusi-kincivkami.html" target="_blank" rel="follow" title="База патентів України">Маніпулятор для реабілітації осіб з недорозвиненими в русі кінцівками</a>
Маніпулятор

Номер патенту: 50260
Опубліковано: 15.10.2002
Автори: Москаленко Олександр Володимирович, Вігдергауз Леонід Павлович
МПК: E21B 1/00
Мітки: маніпулятор
Формула / Реферат:
Маніпулятор, що складається із стріли, шарнірно приєднаної до нерухомої напрямної телескопічного подавача бурильної машини, спареного гідроциліндра переміщення подавача нагору і вниз, гідроциліндра переміщення стріли маніпулятора у вертикальній площині, гідроциліндра повороту стріли маніпулятора за допомогою рейкової зубчатої передачі і кронштейна, до якого приєднана стріла, і гідроциліндра переміщення стріли у вертикальній площині, який...
Маніпулятор портативної радіостанції
Номер патенту: 30167
Опубліковано: 11.02.2008
Автор: Шепотько Павло Олександрович
МПК: H04B 1/44
Мітки: радіостанції, маніпулятор, портативної
Формула / Реферат:
Маніпулятор портативної радіостанції, що містить мікрофон, мікросхему і кнопку-тангенту, який відрізняється тим, що мікрофон і кнопка-тангента винесені за межі блока маніпулятора і з'єднані з ним провідною або безпровідною системою.
Маніпулятор
Номер патенту: 9564
Опубліковано: 17.10.2005
Автори: Іванов Геннадій Олександрович, Бергер Євгеній Емильович, Табацков Вячеслав Петрович, Бергер Еміль Григорович
МПК: B25J 11/00
Мітки: маніпулятор
Формула / Реферат:
Маніпулятор, який має основу з силовим циліндром та захоплювач руки робота, який відрізняється тим, що він обладнаний кривошипно-шатунним механізмом, ланки якого шарнірно закріплені до штока корпусу силового циліндра кулісою, яка оснащена розмічальними штифтами.
Маніпулятор
Номер патенту: 55016
Опубліковано: 10.12.2010
Автори: Шаповалова Галина Микитівна, Воротніков Віталій Анатолійович, Драгомирецький Юлій Олександрович, Кравченко Віталій Андрійович, Кушнір Максим Миколайович, Авдеев Анатолій Олексійович, Кулігін Анатолій Михайлович
МПК: B25J 11/00, B25J 1/00
Мітки: маніпулятор
Формула / Реферат:
1. Маніпулятор, що містить раму, пов'язану з нею руку із затискачем і механізм компенсації ваги, який відрізняється тим, що рама виконана підвісною у вигляді горизонтальної і вертикальної балок, жорстко закріплених між собою краями під прямим кутом, рука закріплена до нижнього краю вертикальної балки співнаправлено з горизонтальною балкою, при цьому рама забезпечена механізмами її вертикального переміщення і кутового розвороту затискача у...
Ковальський маніпулятор
Номер патенту: 5654
Опубліковано: 15.03.2005
Автори: Корчак Олена Сергіївна, Роганов Лев Леонідович
МПК: B21J 13/00
Мітки: ковальський, маніпулятор
Формула / Реферат:
Ковальський маніпулятор, що містить маніпулюючий хобот, шасі у вигляді зварної рами, механізм пересування у вигляді двох колісних пар, які переміщуються уздовж рейкового шляху і рух яким задається від приводу, який відрізняється тим, що оснащений додатковою колісною парою, що зв’язана з задньою колісною парою механізму пересування маніпулятора через регульований важіль, а з передньою - через важіль жорсткості, причому важелі оснащено...
Попередній патент: Мобільний робот
Наступний патент: Глутаматні інгібітори агреканази
Випадковий патент: Пристрій для нормалізації електрообмінних процесів біологічного об'єкта