Багатокоординатний свердлильно-фрезерний верстат
Номер патенту: 101447
Опубліковано: 25.03.2013
Автори: Степаненко Олександр Олександрович, Шинкаренко Василь Федорович, Неделчева Пєнка Мілкова, Кузнєцов Юрій Миколайович, Хамуйєла Жоаким Аугушто Герра, Гайдаєнко Юрій Васильович
Формула / Реферат
1. Багатокоординатний свердлильно-фрезерний верстат, що містить несучу систему, виконану у вигляді каркасної або оболонкової просторової фігури правильної форми з основою у вигляді багатогранника або круга, розташованою на нерухомій підлозі, робочі органи, що включають шпиндельний вузол пінольного типу з інструментальною системою з приводом головного руху і осьової подачі і двокоординатний стіл, на якому розташована заготовка, що обробляється, який відрізняється тим, що несуча система і основа виконані рухомими одна відносно іншої або відносно нерухомої підлоги, а приводи рухів робочих органів виконані як електромеханічні системи без механічних передач.
2. Багатокоординатний свердлильно-фрезерний верстат за п. 1, який відрізняється тим, що несуча система виконана відносно основи поворотною з приводом у вигляді плоскотороїдального електродвигуна, ротор якого зв'язаний із нижньою частиною несучої системи, а статор із нерухомою основою.
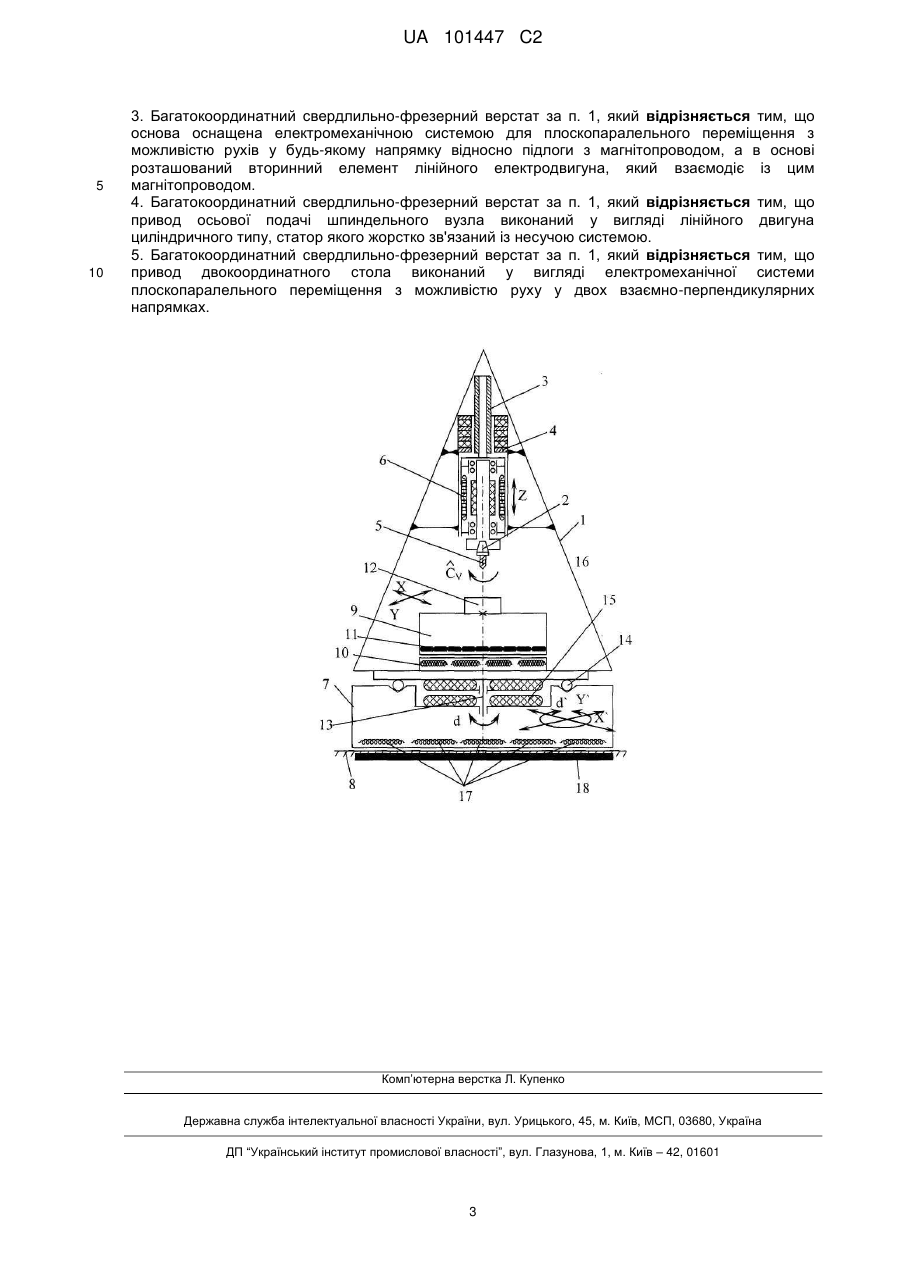
3. Багатокоординатний свердлильно-фрезерний верстат за п. 1, який відрізняється тим, що основа оснащена електромеханічною системою для плоскопаралельного переміщення з можливістю рухів у будь-якому напрямку відносно підлоги з магнітопроводом, а в основі розташований вторинний елемент лінійного електродвигуна, який взаємодіє із цим магнітопроводом.
4. Багатокоординатний свердлильно-фрезерний верстат за п. 1, який відрізняється тим, що привод осьової подачі шпиндельного вузла виконаний у вигляді лінійного двигуна циліндричного типу, статор якого жорстко зв'язаний із несучою системою.
5. Багатокоординатний свердлильно-фрезерний верстат за п. 1, який відрізняється тим, що привод двокоординатного стола виконаний у вигляді електромеханічної системи плоскопаралельного переміщення з можливістю руху у двох взаємно-перпендикулярних напрямках.
Текст
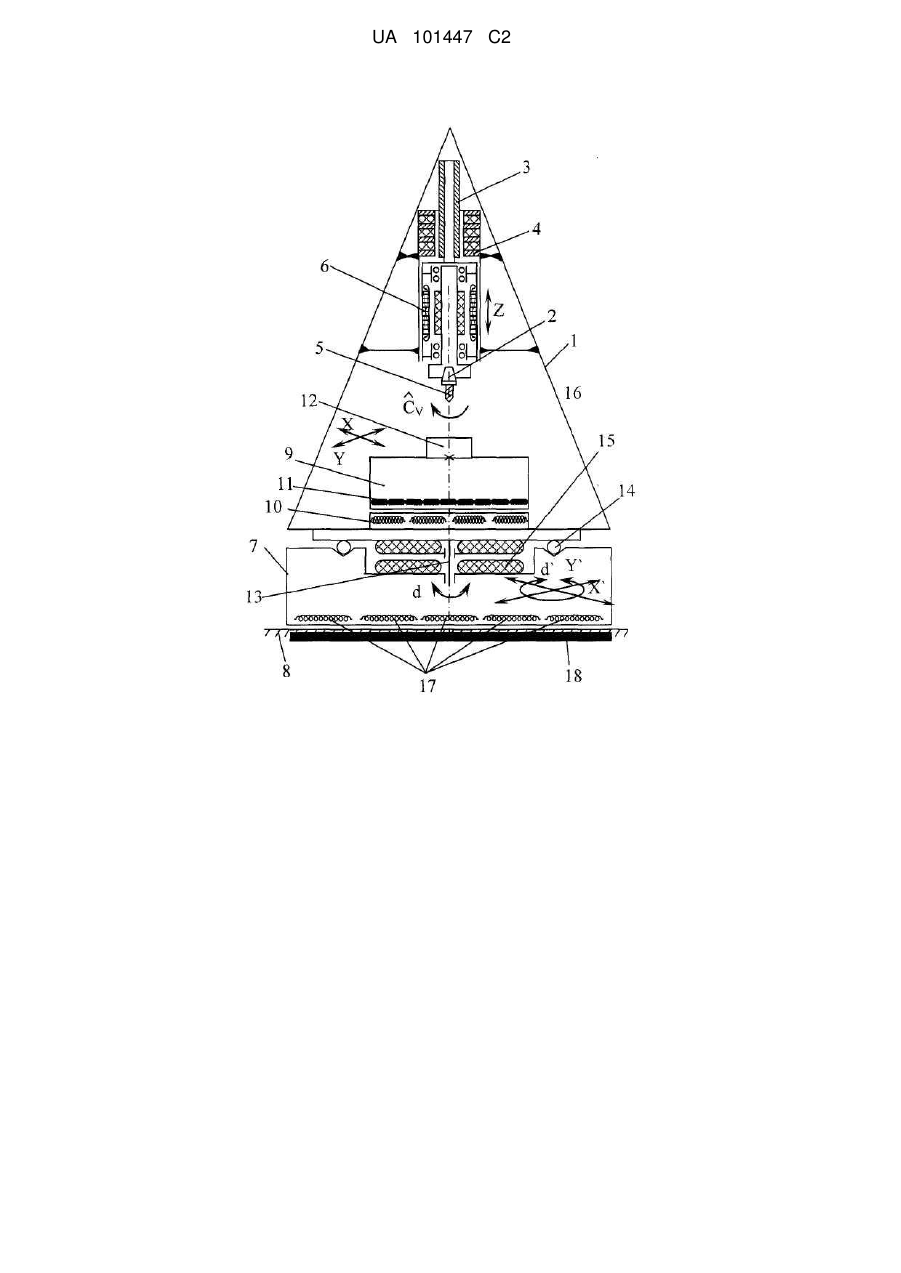
Реферат: Багатокоординатний свердлильно-фрезерний верстат містить несучу систему, робочі органи і двокоординатний стіл, на якому розміщена оброблювана заготовка. Несуча система виконана у вигляді каркасної або оболонкової просторової фігури правильної форми з основою у вигляді багатогранника або круга. Робочі органи включають шпиндельний вузол пінольного типу з інструментальною системою та приводом головного руху і осьової подачі. Несуча система і основа виконані рухомими одна відносно одної або відносно нерухомої підлоги. Приводи рухів робочих органів виконані як електромеханічні системи без механічних передач. Забезпечується безшумність роботи, точність переміщення робочих органів, мобільність і адаптація верстата до навколишнього середовища. UA 101447 C2 (12) UA 101447 C2 UA 101447 C2 5 10 15 20 25 30 35 40 45 50 55 Винахід належить до галузі верстатобудування, а саме до механічної обробки матеріалів різанням, і може бути використаний для виконання різноманітних фрезерних, свердлильних, розточувальних операцій при обробці корпусних, фасонних і плоских заготовок в умовах гнучкого серійного виробництва з використанням автоматизованих систем управління технологічними процесами. Відомий багатокоординатний свердлильно-фрезерний верстат [1], що містить несучу систему клиноподібної форми з верхньою і нижньою основами, жорстко зв'язаними між собою, розташований на верхній основі інструментальний виконавчий орган з приводом обертання інструменту, а на нижній основі поворотний стіл і супорт з можливістю його поступального переміщення в горизонтальній площині по двох координатах. Недоліком верстата є недостатня жорсткість інструментальної системи, що обумовлена додатковими стиками з люфтами в шарнірних з'єднаннях і необхідністю забезпечення високої точності виготовлення шарнірних з'єднань, а також використання датчиків зворотного зв'язку для підвищення точності обробки. Відомий також багатокоординатний свердлильно-фрезерний верстат [2], прийнятий за найближчий аналог, що містить несучу систему, виконану у вигляді каркасної або оболонкової просторової фігури правильної форми з основою у вигляді багатогранника або круга, розташованою на нерухомій підлозі, шпиндельний вузол пінольного типу з інструментальною системою з приводом головного руху і вертикальної подачі або без неї і двокоординатний хрестоподібний стіл, зверху над яким розташована заготовка. Недоліком найближчого аналога є: по-перше, наявність обертових механічних передач, що призводить до шуму, особливо при високих частотах обертання; по-друге, люфти в механічних передачах знижують точність переміщення при зміні його напрямку; по-третє, стаціонарне розташування верстата відносно транспортних потоків руху заготовок, що призводить до необхідності вирішення транспортних задач переміщення деталей між робочими місцями за рахунок збільшення транспортних засобів (промислових роботів, робокарів, завантажувальноперевантажувальних пристроїв та іншого додаткового обладнання). В основу винаходу поставлена задача вдосконалення багатокоординатного свердлильнофрезерного верстата шляхом того, що несуча система і основа виконані рухомими одна відносно іншої або відносно нерухомої підлоги, а приводи рухів робочих органів виконані як електромеханічні системи без механічних передач, що дозволяє досягнути технічний результат - забезпечити безшумність роботи, точність переміщення робочих органів, мобільність і адаптацію верстата до навколишнього середовища і зменшити кількість додаткових транспортних засобів в умовах гнучкого автоматизованого виробництва. Вирішення поставленої задачі досягається тим, що в багатокоординатному свердлильнофрезерному верстаті, що містить несучу систему, виконану у вигляді каркасної або оболонкової просторової фігури правильної форми з основою у вигляді багатогранника або круга, розташованою на нерухомій підлозі, робочі органи, що включать шпиндельний вузол пінольного типу з інструментальною системою з приводом головного руху і осьової подачі і двокоординатний стіл, на якому розташована заготовка, що обробляється, згідно з винаходом, несуча система і основа виконані рухомими одна відносно іншої або відносно нерухомої підлоги. При цьому несуча система може бути виконана відносно основи поворотною з приводом у вигляді плоскотороїдального електродвигуна, ротор якого зв'язаний із нижньою частиною несучої системи, а статор із нерухомою основою, а основа оснащена електромеханічною системою для плоскопаралельного переміщення з можливістю рухів у будьякому напрямку відносно підлоги з магнітопроводом, і в ній розташований вторинний елемент лінійного електродвигуна, який взаємодіє із цим магнітопроводом. Надання додаткової рухомості несучій системі й основі забезпечує мобільність і адаптацію верстата і ліквідує зайві транспортні засоби для маніпулювання заготовкою, що обробляється, в умовах гнучкого автоматизованого виробництва. Крім того, завдяки тому, що привод осьової подачі шпиндельного вузла виконаний у вигляді лінійного двигуна циліндричного типу, статор якого жорстко зв'язаний із несучою системою, а привод двокоординатного стола виконаний у вигляді лінійного електродвигуна плоского типу з можливістю руху у двох взаємно-перпендикулярних напрямках, забезпечується безшумність, швидкодія і точність переміщення робочих органів верстата. Усі нові ознаки запропонованого винаходу в кінцевому рахунку дозволяють підвищити продуктивність і якість виготовлення продукції при зменшенні енергетичних витрат. Суть винаходу пояснюється кресленням, де зображена принципова електрокінематична схема верстата пірамідальної компоновки. 1 UA 101447 C2 5 10 15 20 25 30 35 40 45 Багатокоординатний свердлильно-фрезерний верстат містить несучу систему 1, виконану у вигляді, наприклад, симетричної чотиригранної зрізаної піраміди, у верхній частині якої розміщений інструментальний виконавчий орган 2 пінольного типу з механізмом вертикальної подачі 3 (координата Z) від крокового електродвигуна 4. Інструмент 5 закріплений в моторшпинделі 6. Несуча система 1 може бути виконана у вигляді каркасної або оболонкової просторової фігури правильної форми з основою 7 у вигляді багатогранника або круга, розташованою на нерухомій підлозі 8. У нижній частині несучої системи 1 розташований двокоординатний стіл 9, виконаний у вигляді електромеханічної системи плоскопаралельного переміщення зі статором 10, жорстко зв'язаним з несучою системою 1, і ротором 11, вмонтованим у двокоординатний стіл 9. На столі 9 встановлюється і затискається заготовка 12, що обробляється (затискне пристосування на кресленні не показано). Несуча система 1 встановлена на осі 13 з опорами і на кругових напрямних кочення 14. Для повороту несучої системи 1 призначений плоскотороїдальний двигун, статор 15 якого жорстко зв'язаний з основою 7, а ротор 16 - із днищем несучої системи. У днище основи 7 вмонтований вторинний елемент 17 електромеханічної системи плоскопаралельного переміщення, що забезпечує рухи основи 7 відносно підлоги 8, у якій розташований статор 15 електромеханічної системи плоскопаралельного переміщення, магнітопровід якої формує транспортну трасу для верстата в приміщенні ділянки або цеха підприємства. Верстат працює наступним чином. На стіл 9 встановлюється і закріплюється заготовка 12 за допомогою завантажувальнорозвантажувального пристрою (на кресленні не показаний). Вмикається привод обертання інструмента 5 (координата Cv), а далі за програмою виконується обробка заготовки 12. Програма обробки задається системою числового програмного керування (ЧПК), на кресленні не показана, що дає відповідні сигнали формоутворюючих рухів електродвигунам подач за координатами X, Y, Z. За необхідності зміни кутового положення несучої системи 1 згідно з програмою подається команда на плоскотороїдальний електродвигун 15, 16, який забезпечує поворотний рух на відповідний кут (координата d), якщо це передбачено в роботі гнучкого автоматизованого виробництва, наприклад для завантаження заготовки, розвантаження готової деталі або розв'язання передбачених транспортних задач. Можливі різні варіанти реалізації додаткових рухів верстата в умовах його мобільності і адаптації при гнучкому автоматизованому виробництві. Завдяки вмонтованій електромеханічній системі плоскопаралельного переміщення 17 забезпечується позиціонування основи верстата 7 на площині підлоги 8, яка виконана як статор 18 лінійного електродвигуна (лінійні за координатами X', У' і кутові за координатою d'). Відмінність від відомих варіантів запропонованої конструкції полягає в забезпеченні вільної орієнтації верстата в робочому просторі виробництва. Свердлильно-фрезерний верстат може знайти широке використання в машинобудуванні для використання в гнучких виробничих комплексах та системах. Джерела інформації: 1. Патент України на корисну модель №35576. Багатокоординатний свердлильнофрезерний верстат. Кузнецов Ю.М. МПК В23В 39/00, B23C 1/00, опубл. 25.09.2008, бюл. №18. 2. Патент України на корисну модель № 64422. Багатокоординатний свердлильнофрезерний верстат. Кузнецов Ю.М., Фіранський В.Б., Степаненко О.О. МПК B23Q 1/00, В23В 39/00, опубл. 10.11.2011. ФОРМУЛА ВИНАХОДУ 50 55 60 1. Багатокоординатний свердлильно-фрезерний верстат, що містить несучу систему, виконану у вигляді каркасної або оболонкової просторової фігури правильної форми з основою у вигляді багатогранника або круга, розташованою на нерухомій підлозі, робочі органи, що включають шпиндельний вузол пінольного типу з інструментальною системою з приводом головного руху і осьової подачі і двокоординатний стіл, на якому розташована заготовка, що обробляється, який відрізняється тим, що несуча система і основа виконані рухомими одна відносно іншої або відносно нерухомої підлоги, а приводи рухів робочих органів виконані як електромеханічні системи без механічних передач. 2. Багатокоординатний свердлильно-фрезерний верстат за п. 1, який відрізняється тим, що несуча система виконана відносно основи поворотною з приводом у вигляді плоскотороїдального електродвигуна, ротор якого зв'язаний із нижньою частиною несучої системи, а статор із нерухомою основою. 2 UA 101447 C2 5 10 3. Багатокоординатний свердлильно-фрезерний верстат за п. 1, який відрізняється тим, що основа оснащена електромеханічною системою для плоскопаралельного переміщення з можливістю рухів у будь-якому напрямку відносно підлоги з магнітопроводом, а в основі розташований вторинний елемент лінійного електродвигуна, який взаємодіє із цим магнітопроводом. 4. Багатокоординатний свердлильно-фрезерний верстат за п. 1, який відрізняється тим, що привод осьової подачі шпиндельного вузла виконаний у вигляді лінійного двигуна циліндричного типу, статор якого жорстко зв'язаний із несучою системою. 5. Багатокоординатний свердлильно-фрезерний верстат за п. 1, який відрізняється тим, що привод двокоординатного стола виконаний у вигляді електромеханічної системи плоскопаралельного переміщення з можливістю руху у двох взаємно-перпендикулярних напрямках. Комп’ютерна верстка Л. Купенко Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
Назва патенту англійськоюMultiaxis drilling-and-milling machine
Автори англійськоюKuznietsov Yurii Mykolaiovych, Shynkarenko Vasyl Fedorovych, Nedelcheva Pienka Mylkova, Stepanenko Oleksandr Oleksandrovych, Haidaienko Yurii Vasyliovych, Joaquim Augusto Guerra Hamuyela
Назва патенту російськоюМногокоординатный сверлильно-фрезерный станок
Автори російськоюКузнецов Юрий Николаевич, Шинкаренко Василий Федорович, Неделчева Пенка Милкова, Степаненко Александр Александрович, Гайдаенко Юрий Васильевич, Хамуйела Жоаким Аугушто Герра
МПК / Мітки
МПК: B23C 1/00, B23B 39/00, B23Q 1/00
Мітки: багатокоординатний, верстат, свердлильно-фрезерний
Код посилання
<a href="https://ua.patents.su/5-101447-bagatokoordinatnijj-sverdlilno-frezernijj-verstat.html" target="_blank" rel="follow" title="База патентів України">Багатокоординатний свердлильно-фрезерний верстат</a>
Багатокоординатний свердлильно-фрезерний верстат
Номер патенту: 67317
Опубліковано: 10.02.2012
Автори: Фіранський Володимир Борисович, Шинкаренко Василь Федорович, Хамуйєла Аугушту Жоакима Герра, Кузнєцов Юрій Миколайович
МПК: B23B 39/00, B23B 35/00, B23Q 1/00
Мітки: багатокоординатний, свердлильно-фрезерний, верстат
Формула / Реферат:
1. Багатокоординатний свердлильно-фрезерний верстат, що містить несучу систему, виконану у вигляді або оболонкової просторової фігури правильної форми з основою у вигляді багатогранника, або круга, розташовану на нерухомій підлозі, шпиндельний вузлопінольного типу з інструментальною системою на рухомій або нерухомій платформі з приводом головного руху і вертикальної подачі або без неї і двокоординатний хрестоподібний стіл, зверху якого...
Багатокоординатний свердлильно-фрезерний верстат

Номер патенту: 64422
Опубліковано: 10.11.2011
Автори: Степаненко Олександр Олександрович, Фіранський Володимир Борисович, Кузнєцов Юрій Миколайович
МПК: B23B 35/00, B23B 39/00, B23Q 1/00
Мітки: свердлильно-фрезерний, багатокоординатний, верстат
Формула / Реферат:
1. Багатокоординатний свердлильно-фрезерний верстат, що містить несучу систему з верхньою і нижньою основами, жорстко зв'язаними між собою, розташований на верхній основі інструментальний виконавчий орган з приводом обертання інструмента, а на нижній основі - поворотний стіл і супорт з можливістю поступового його переміщення в горизонтальній площині по двох координатах, який відрізняється тим, що несуча система виконана у вигляді каркасної...
Багатокоординатний свердлильно-фрезерний верстат
Номер патенту: 86533
Опубліковано: 27.04.2009
Автори: Дмитрієв Дмитро Олексійович, Діневич Григорій Юхимович, Кузнєцов Юрій Миколайович
МПК: B23B 39/00, B23Q 1/00
Мітки: свердлильно-фрезерний, верстат, багатокоординатний
Формула / Реферат:
1. Багатокоординатний свердлильно-фрезерний верстат, що містить верхню і нижню основи, жорстко зв'язані між собою через механізми поступового руху однакової довжини з опорами, три штанги постійної довжини, одні кінці яких з'єднані через шарніри з повзунами механізмів поступового руху, а другі з платформою, на якій розташований інструментальний виконавчий орган з приводом обертання інструменту, який відрізняється тим, що осі механізмів...
Багатокоординатний свердлильно-фрезерний верстат
Номер патенту: 35576
Опубліковано: 25.09.2008
Автор: Кузнєцов Юрій Миколайович
МПК: B23C 1/00, B23B 39/00
Мітки: верстат, багатокоординатний, свердлильно-фрезерний
Формула / Реферат:
1. Багатокоординатний свердлильно-фрезерний верстат, що містить верхню і нижню основи, жорстко зв'язані між собою через механізми поступового руху однакової довжини з опорами, штанги постійної довжини, одні кінці яких з'єднані через шарніри з повзунами механізмів поступового руху, а другі - з платформою, на якій розташований інструментальний виконавчий орган з приводом обертання інструмента, який відрізняється тим, що опори осей механізмів...
Багатокоординатний фрезерний верстат

Номер патенту: 74716
Опубліковано: 12.11.2012
Автори: Кузнєцов Юрій Миколайович, Манжола Марина Юріївна, Степаненко Олександр Олександрович
МПК: B23B 35/00
Мітки: багатокоординатний, верстат, фрезерний
Формула / Реферат:
Багатокоординатний фрезерний верстат, що містить нижню основу з чотирма напрямними, на яких дві каретки шарнірно зв'язані з верхньою основою паралелограмними штангами постійної довжини, а дві інші каретки - одинарними штангами постійної довжини таким чином, що верхня основа має чотири ступені свободи, який відрізняється тим, що основи зв'язані між собою напрямними у вигляді подвійних спарених стрижів, що утворюють каркасну несучу систему,...
Попередній патент: Пристрій для температурної обробки сипких матеріалів
Наступний патент: Спосіб монтажу мостового крана
Випадковий патент: Заміщені піперидином і піперазином n-гідроксиформаміди як інгібітори металопротеїназ