Багатокоординатний фрезерний верстат
Номер патенту: 74716
Опубліковано: 12.11.2012
Автори: Манжола Марина Юріївна, Степаненко Олександр Олександрович, Кузнєцов Юрій Миколайович


Формула / Реферат
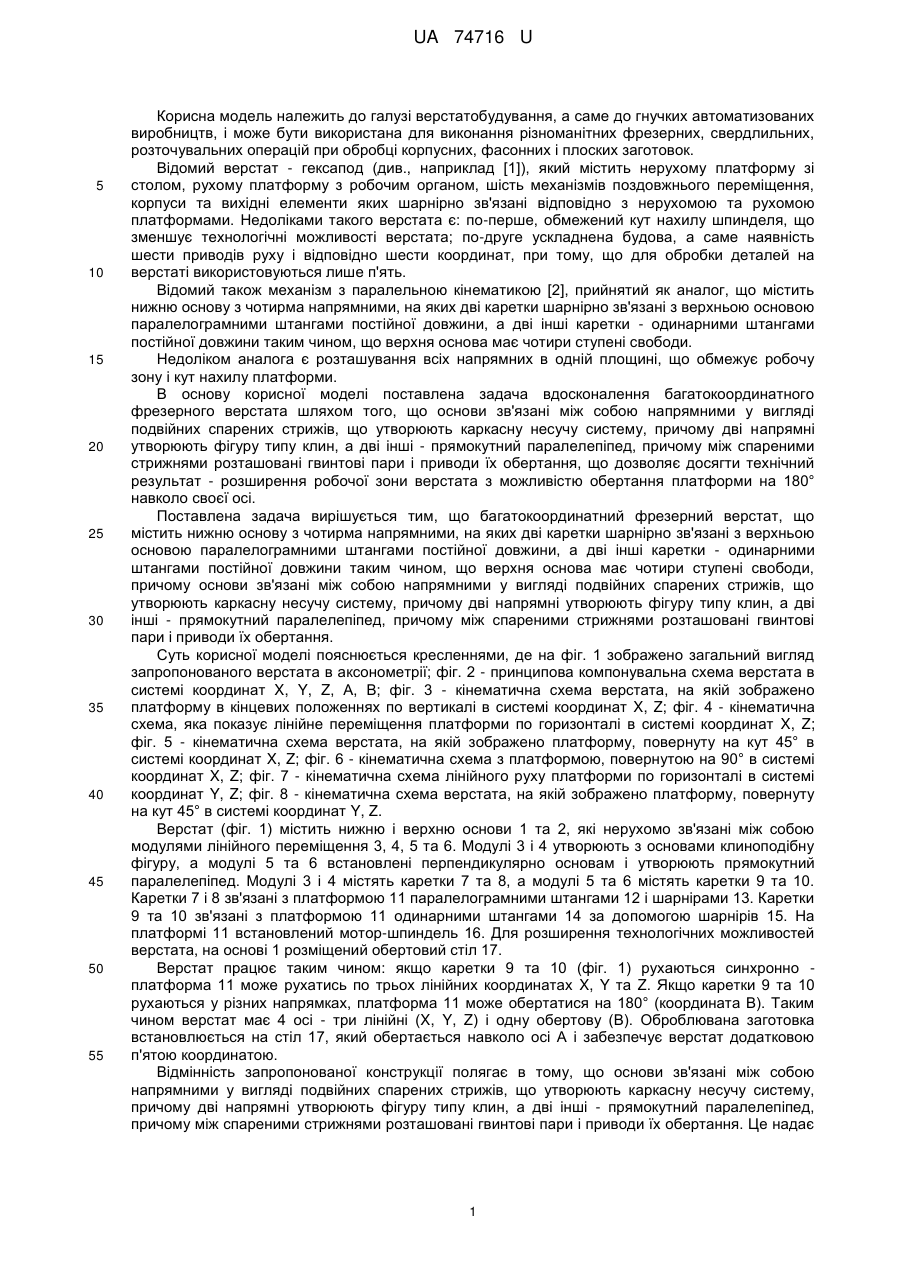
Багатокоординатний фрезерний верстат, що містить нижню основу з чотирма напрямними, на яких дві каретки шарнірно зв'язані з верхньою основою паралелограмними штангами постійної довжини, а дві інші каретки - одинарними штангами постійної довжини таким чином, що верхня основа має чотири ступені свободи, який відрізняється тим, що основи зв'язані між собою напрямними у вигляді подвійних спарених стрижів, що утворюють каркасну несучу систему, причому дві напрямні утворюють фігуру типу клин, а дві інші - прямокутний паралелепіпед, причому між спареними стрижнями розташовані гвинтові пари і приводи їх обертання.
Текст
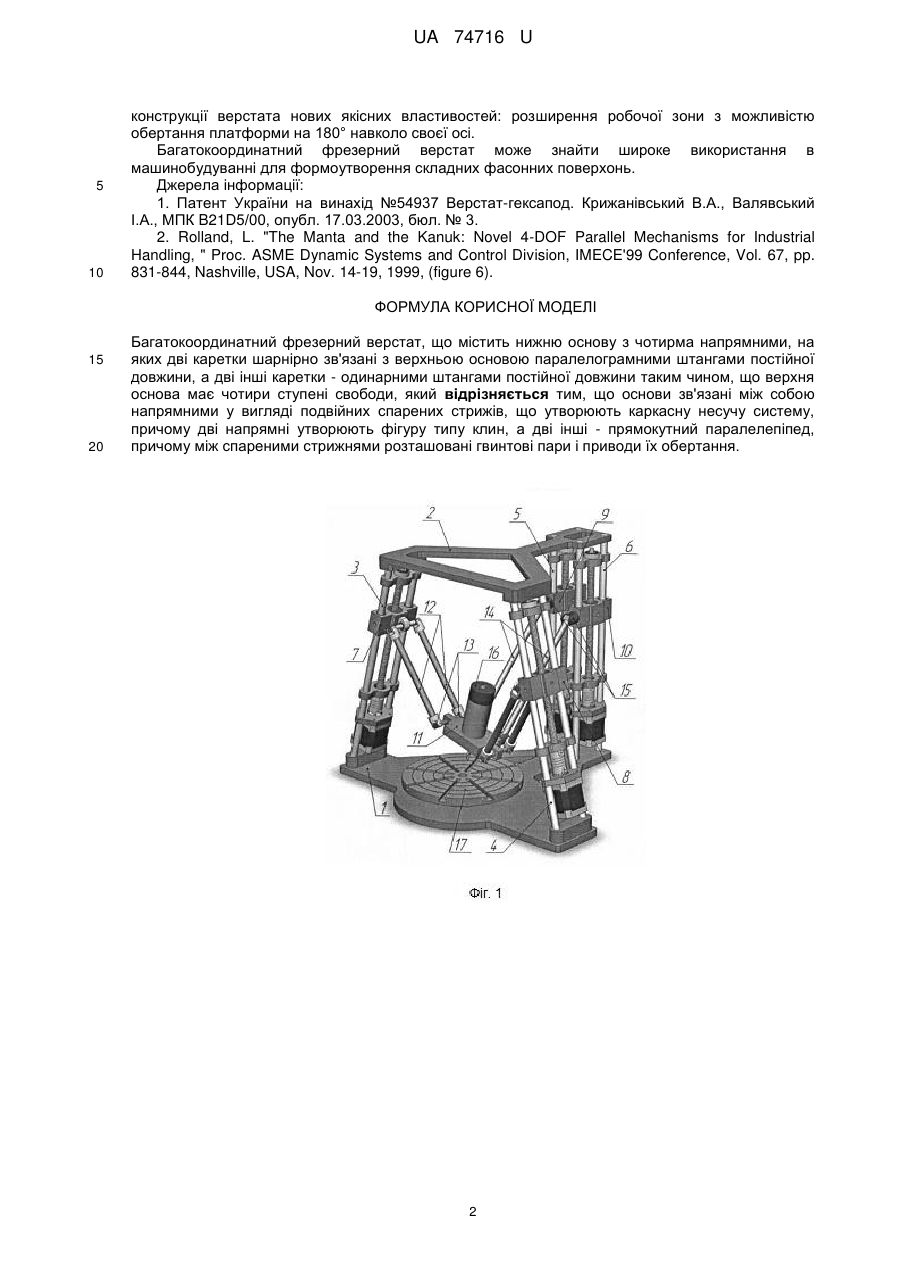
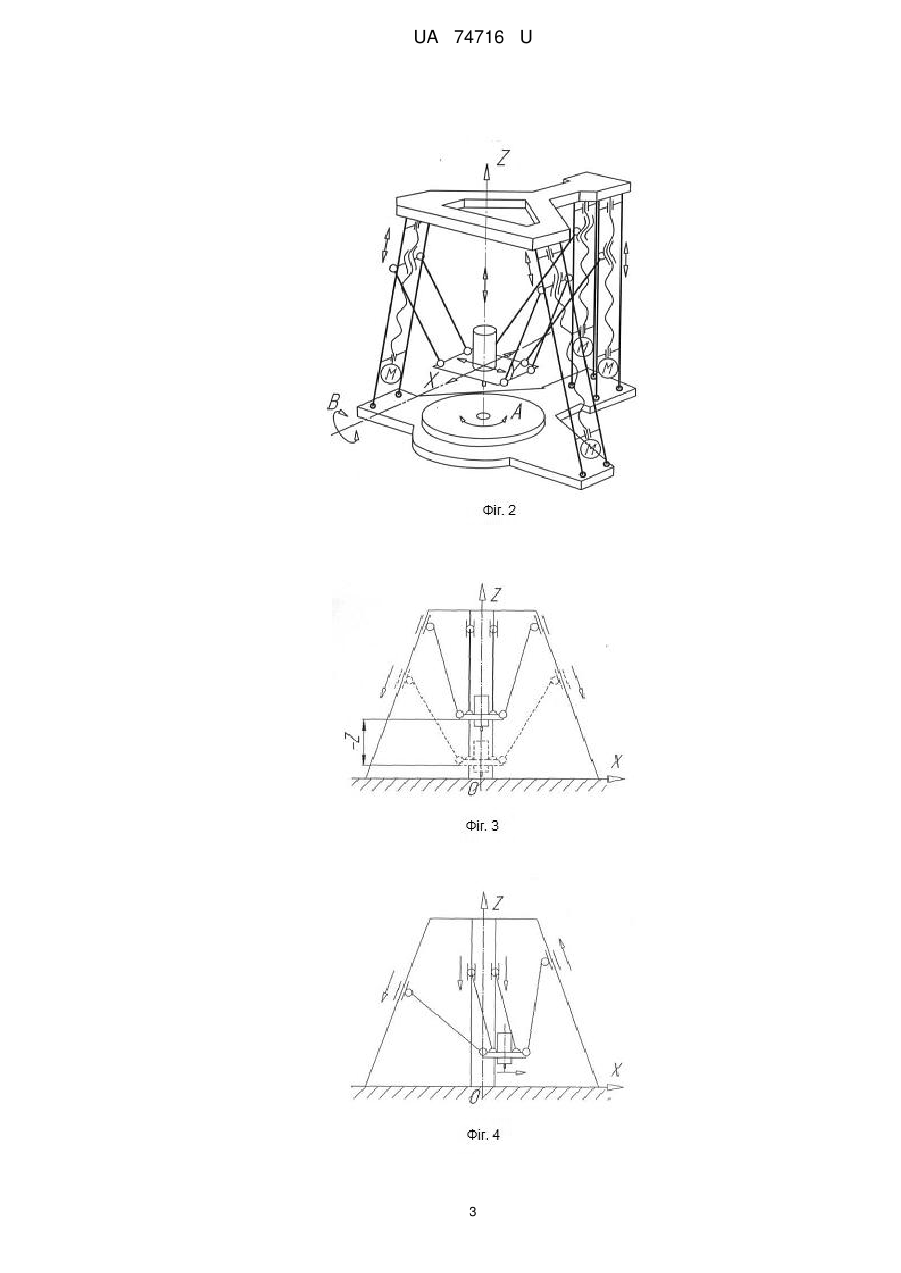
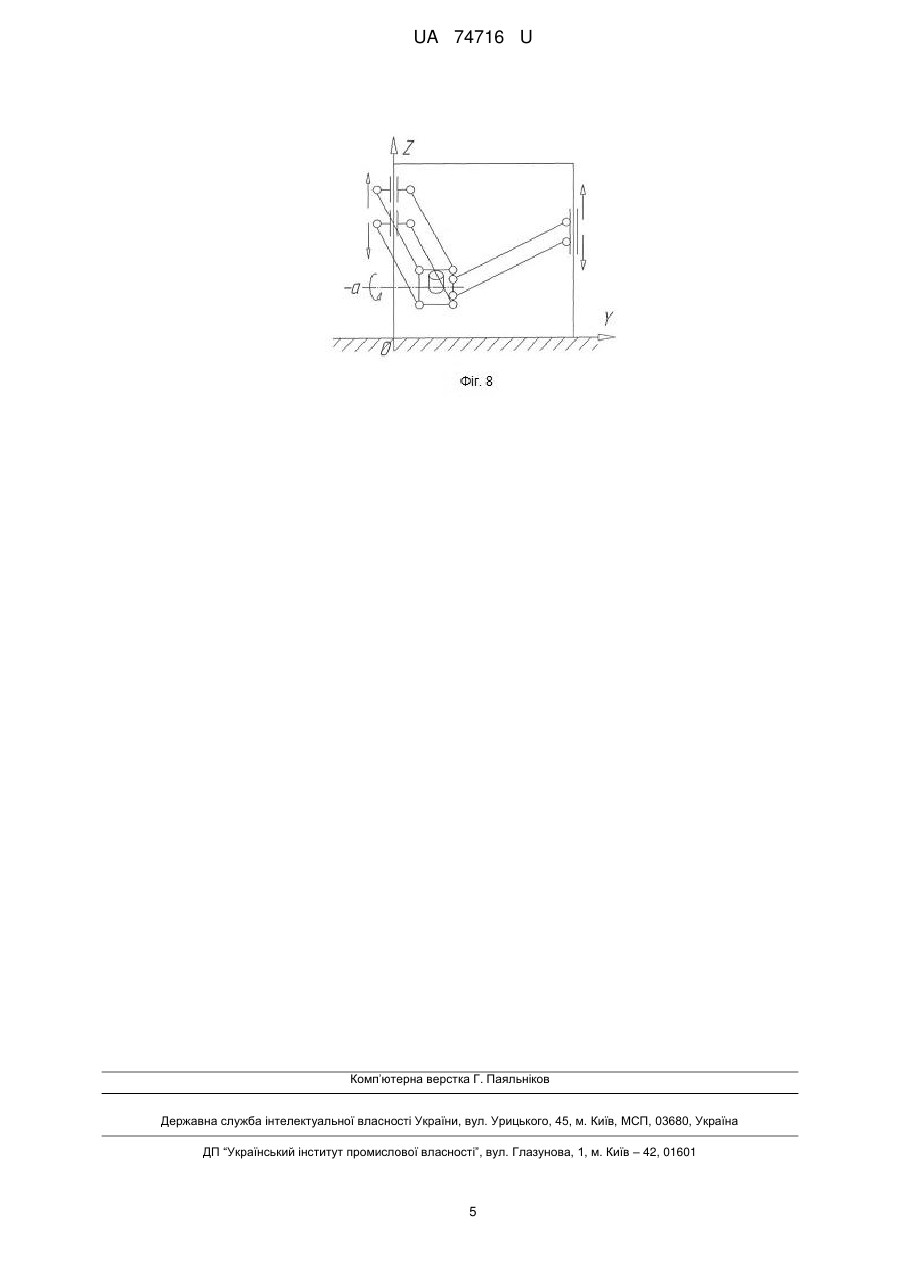
Реферат: UA 74716 U UA 74716 U 5 10 15 20 25 30 35 40 45 50 55 Корисна модель належить до галузі верстатобудування, а саме до гнучких автоматизованих виробництв, і може бути використана для виконання різноманітних фрезерних, свердлильних, розточувальних операцій при обробці корпусних, фасонних і плоских заготовок. Відомий верстат - гексапод (див., наприклад [1]), який містить нерухому платформу зі столом, рухому платформу з робочим органом, шість механізмів поздовжнього переміщення, корпуси та вихідні елементи яких шарнірно зв'язані відповідно з нерухомою та рухомою платформами. Недоліками такого верстата є: по-перше, обмежений кут нахилу шпинделя, що зменшує технологічні можливості верстата; по-друге ускладнена будова, а саме наявність шести приводів руху і відповідно шести координат, при тому, що для обробки деталей на верстаті використовуються лише п'ять. Відомий також механізм з паралельною кінематикою [2], прийнятий як аналог, що містить нижню основу з чотирма напрямними, на яких дві каретки шарнірно зв'язані з верхньою основою паралелограмними штангами постійної довжини, а дві інші каретки - одинарними штангами постійної довжини таким чином, що верхня основа має чотири ступені свободи. Недоліком аналога є розташування всіх напрямних в одній площині, що обмежує робочу зону і кут нахилу платформи. В основу корисної моделі поставлена задача вдосконалення багатокоординатного фрезерного верстата шляхом того, що основи зв'язані між собою напрямними у вигляді подвійних спарених стрижів, що утворюють каркасну несучу систему, причому дві напрямні утворюють фігуру типу клин, а дві інші - прямокутний паралелепіпед, причому між спареними стрижнями розташовані гвинтові пари і приводи їх обертання, що дозволяє досягти технічний результат - розширення робочої зони верстата з можливістю обертання платформи на 180° навколо своєї осі. Поставлена задача вирішується тим, що багатокоординатний фрезерний верстат, що містить нижню основу з чотирма напрямними, на яких дві каретки шарнірно зв'язані з верхньою основою паралелограмними штангами постійної довжини, а дві інші каретки - одинарними штангами постійної довжини таким чином, що верхня основа має чотири ступені свободи, причому основи зв'язані між собою напрямними у вигляді подвійних спарених стрижів, що утворюють каркасну несучу систему, причому дві напрямні утворюють фігуру типу клин, а дві інші - прямокутний паралелепіпед, причому між спареними стрижнями розташовані гвинтові пари і приводи їх обертання. Суть корисної моделі пояснюється кресленнями, де на фіг. 1 зображено загальний вигляд запропонованого верстата в аксонометрії; фіг. 2 - принципова компонувальна схема верстата в системі координат X, Y, Z, А, В; фіг. 3 - кінематична схема верстата, на якій зображено платформу в кінцевих положеннях по вертикалі в системі координат X, Z; фіг. 4 - кінематична схема, яка показує лінійне переміщення платформи по горизонталі в системі координат X, Z; фіг. 5 - кінематична схема верстата, на якій зображено платформу, повернуту на кут 45° в системі координат X, Z; фіг. 6 - кінематична схема з платформою, повернутою на 90° в системі координат X, Z; фіг. 7 - кінематична схема лінійного руху платформи по горизонталі в системі координат Y, Z; фіг. 8 - кінематична схема верстата, на якій зображено платформу, повернуту на кут 45° в системі координат Y, Z. Верстат (фіг. 1) містить нижню і верхню основи 1 та 2, які нерухомо зв'язані між собою модулями лінійного переміщення 3, 4, 5 та 6. Модулі 3 і 4 утворюють з основами клиноподібну фігуру, а модулі 5 та 6 встановлені перпендикулярно основам і утворюють прямокутний паралелепіпед. Модулі 3 і 4 містять каретки 7 та 8, а модулі 5 та 6 містять каретки 9 та 10. Каретки 7 і 8 зв'язані з платформою 11 паралелограмними штангами 12 і шарнірами 13. Каретки 9 та 10 зв'язані з платформою 11 одинарними штангами 14 за допомогою шарнірів 15. На платформі 11 встановлений мотор-шпиндель 16. Для розширення технологічних можливостей верстата, на основі 1 розміщений обертовий стіл 17. Верстат працює таким чином: якщо каретки 9 та 10 (фіг. 1) рухаються синхронно платформа 11 може рухатись по трьох лінійних координатах X, Y та Z. Якщо каретки 9 та 10 рухаються у різних напрямках, платформа 11 може обертатися на 180° (координата В). Таким чином верстат має 4 осі - три лінійні (X, Y, Z) і одну обертову (В). Оброблювана заготовка встановлюється на стіл 17, який обертається навколо осі А і забезпечує верстат додатковою п'ятою координатою. Відмінність запропонованої конструкції полягає в тому, що основи зв'язані між собою напрямними у вигляді подвійних спарених стрижів, що утворюють каркасну несучу систему, причому дві напрямні утворюють фігуру типу клин, а дві інші - прямокутний паралелепіпед, причому між спареними стрижнями розташовані гвинтові пари і приводи їх обертання. Це надає 1 UA 74716 U 5 10 конструкції верстата нових якісних властивостей: розширення робочої зони з можливістю обертання платформи на 180° навколо своєї осі. Багатокоординатний фрезерний верстат може знайти широке використання в машинобудуванні для формоутворення складних фасонних поверхонь. Джерела інформації: 1. Патент України на винахід №54937 Верстат-гексапод. Крижанівський В.А., Валявський І.А., МПК B21D5/00, опубл. 17.03.2003, бюл. № 3. 2. Rolland, L. "The Manta and the Kanuk: Novel 4-DOF Parallel Mechanisms for Industrial Handling, " Proc. ASME Dynamic Systems and Control Division, IMECE'99 Conference, Vol. 67, pp. 831-844, Nashville, USA, Nov. 14-19, 1999, (figure 6). ФОРМУЛА КОРИСНОЇ МОДЕЛІ 15 20 Багатокоординатний фрезерний верстат, що містить нижню основу з чотирма напрямними, на яких дві каретки шарнірно зв'язані з верхньою основою паралелограмними штангами постійної довжини, а дві інші каретки - одинарними штангами постійної довжини таким чином, що верхня основа має чотири ступені свободи, який відрізняється тим, що основи зв'язані між собою напрямними у вигляді подвійних спарених стрижів, що утворюють каркасну несучу систему, причому дві напрямні утворюють фігуру типу клин, а дві інші - прямокутний паралелепіпед, причому між спареними стрижнями розташовані гвинтові пари і приводи їх обертання. 2 UA 74716 U 3 UA 74716 U 4 UA 74716 U Комп’ютерна верстка Г. Паяльніков Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 5
ДивитисяДодаткова інформація
Назва патенту англійськоюMultiaxes milling machine
Автори англійськоюKuznietsov Yurii Mykolaiovych, Stepanenko Oleksandr Oleksandrovych, Manzhola Maryna Yuriivna
Назва патенту російськоюМногокоординатный фрезерный станок
Автори російськоюКузнецов Юрий Николаевич, Степаненко Александр Александрович, Манжола Марина Юрьевна
МПК / Мітки
МПК: B23B 35/00
Мітки: фрезерний, верстат, багатокоординатний
Код посилання
<a href="https://ua.patents.su/7-74716-bagatokoordinatnijj-frezernijj-verstat.html" target="_blank" rel="follow" title="База патентів України">Багатокоординатний фрезерний верстат</a>
Багатокоординатний фрезерний верстат

Номер патенту: 66830
Опубліковано: 25.01.2012
Автори: Кузнєцов Юрій Миколайович, Фіранський Володимир Борисович, Степаненко Олександр Олександрович, Дмитрієв Дмитро Олексійович
МПК: B23B 35/00, B23C 1/00
Мітки: багатокоординатний, фрезерний, верстат
Формула / Реферат:
Багатокоординатний фрезерний верстат, що містить верхню і нижню основи, механізми поступового руху постійної довжини, шарнірно зв'язані між собою через штанги постійної довжини, одні кінці яких з'єднані через шарніри з повзунами механізмів поступового руху, а другі - з платформою, на якій розташований інструментальний виконавчий орган з приводом обертання інструмента, причому опори осей механізмів поступового руху утворюють в нижній частині...
Багатокоординатний свердлильно-фрезерний верстат
Номер патенту: 86533
Опубліковано: 27.04.2009
Автори: Діневич Григорій Юхимович, Кузнєцов Юрій Миколайович, Дмитрієв Дмитро Олексійович
МПК: B23B 39/00, B23Q 1/00
Мітки: верстат, свердлильно-фрезерний, багатокоординатний
Формула / Реферат:
1. Багатокоординатний свердлильно-фрезерний верстат, що містить верхню і нижню основи, жорстко зв'язані між собою через механізми поступового руху однакової довжини з опорами, три штанги постійної довжини, одні кінці яких з'єднані через шарніри з повзунами механізмів поступового руху, а другі з платформою, на якій розташований інструментальний виконавчий орган з приводом обертання інструменту, який відрізняється тим, що осі механізмів...
Багатокоординатний свердлильно-фрезерний верстат
Номер патенту: 35576
Опубліковано: 25.09.2008
Автор: Кузнєцов Юрій Миколайович
МПК: B23C 1/00, B23B 39/00
Мітки: свердлильно-фрезерний, багатокоординатний, верстат
Формула / Реферат:
1. Багатокоординатний свердлильно-фрезерний верстат, що містить верхню і нижню основи, жорстко зв'язані між собою через механізми поступового руху однакової довжини з опорами, штанги постійної довжини, одні кінці яких з'єднані через шарніри з повзунами механізмів поступового руху, а другі - з платформою, на якій розташований інструментальний виконавчий орган з приводом обертання інструмента, який відрізняється тим, що опори осей механізмів...
Багатокоординатний свердлильно-фрезерний верстат
Номер патенту: 67317
Опубліковано: 10.02.2012
Автори: Кузнєцов Юрій Миколайович, Шинкаренко Василь Федорович, Фіранський Володимир Борисович, Хамуйєла Аугушту Жоакима Герра
МПК: B23B 35/00, B23Q 1/00, B23B 39/00
Мітки: верстат, багатокоординатний, свердлильно-фрезерний
Формула / Реферат:
1. Багатокоординатний свердлильно-фрезерний верстат, що містить несучу систему, виконану у вигляді або оболонкової просторової фігури правильної форми з основою у вигляді багатогранника, або круга, розташовану на нерухомій підлозі, шпиндельний вузлопінольного типу з інструментальною системою на рухомій або нерухомій платформі з приводом головного руху і вертикальної подачі або без неї і двокоординатний хрестоподібний стіл, зверху якого...
Багатокоординатний свердлильно-фрезерний верстат

Номер патенту: 64422
Опубліковано: 10.11.2011
Автори: Кузнєцов Юрій Миколайович, Степаненко Олександр Олександрович, Фіранський Володимир Борисович
МПК: B23B 35/00, B23B 39/00, B23Q 1/00
Мітки: свердлильно-фрезерний, верстат, багатокоординатний
Формула / Реферат:
1. Багатокоординатний свердлильно-фрезерний верстат, що містить несучу систему з верхньою і нижньою основами, жорстко зв'язаними між собою, розташований на верхній основі інструментальний виконавчий орган з приводом обертання інструмента, а на нижній основі - поворотний стіл і супорт з можливістю поступового його переміщення в горизонтальній площині по двох координатах, який відрізняється тим, що несуча система виконана у вигляді каркасної...
Попередній патент: Спосіб визначення рівня тривожності в дітей шкільного віку
Наступний патент: Верстат для різання пінопласту
Випадковий патент: Спосіб діагностики пневмонії у дітей раннього віку