Позиційна система керування з частотнорегульованим електроприводом
Номер патенту: 102319
Опубліковано: 26.10.2015
Автори: Калінов Андрій Петрович, Мартиненко Олександр Віталійович

Формула / Реферат
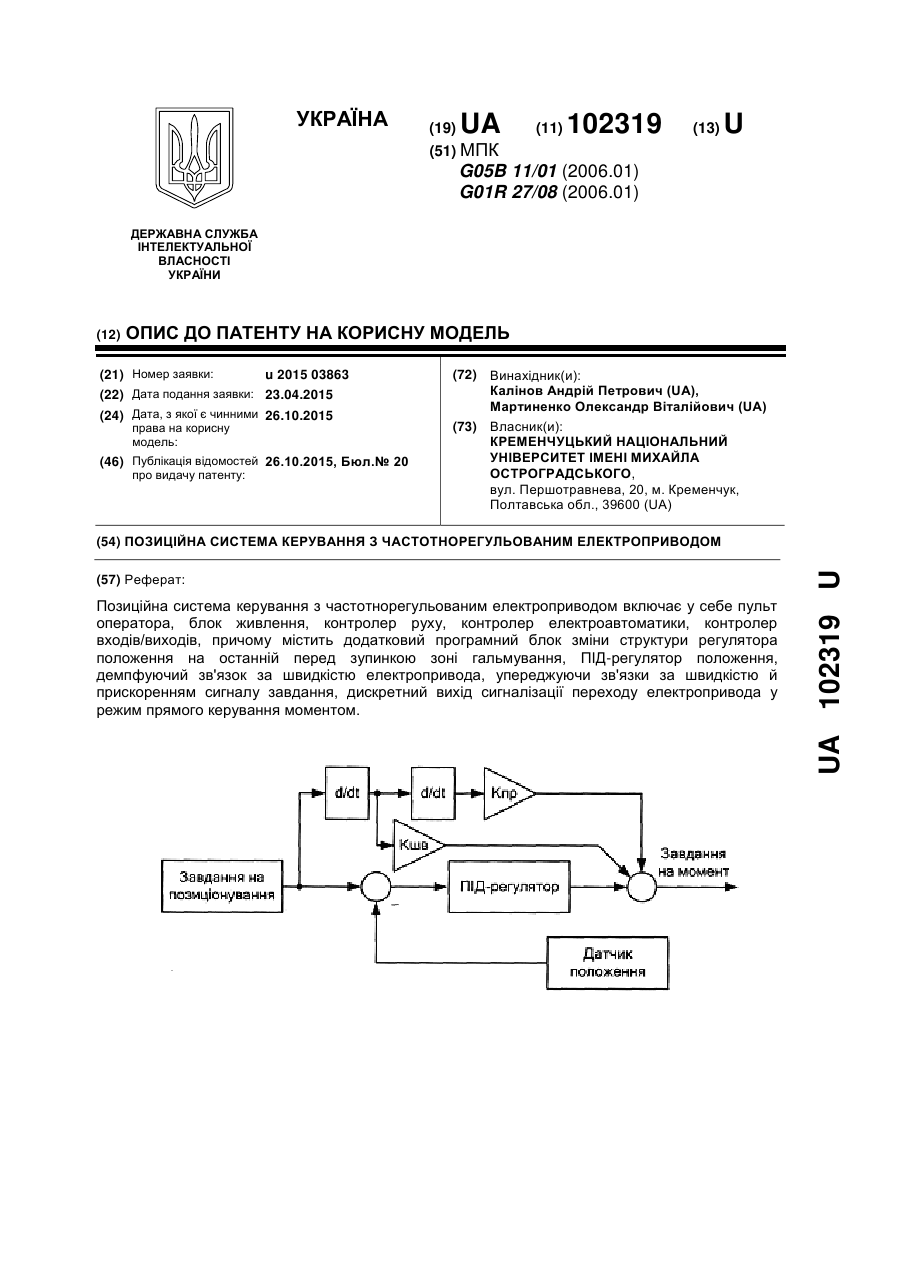
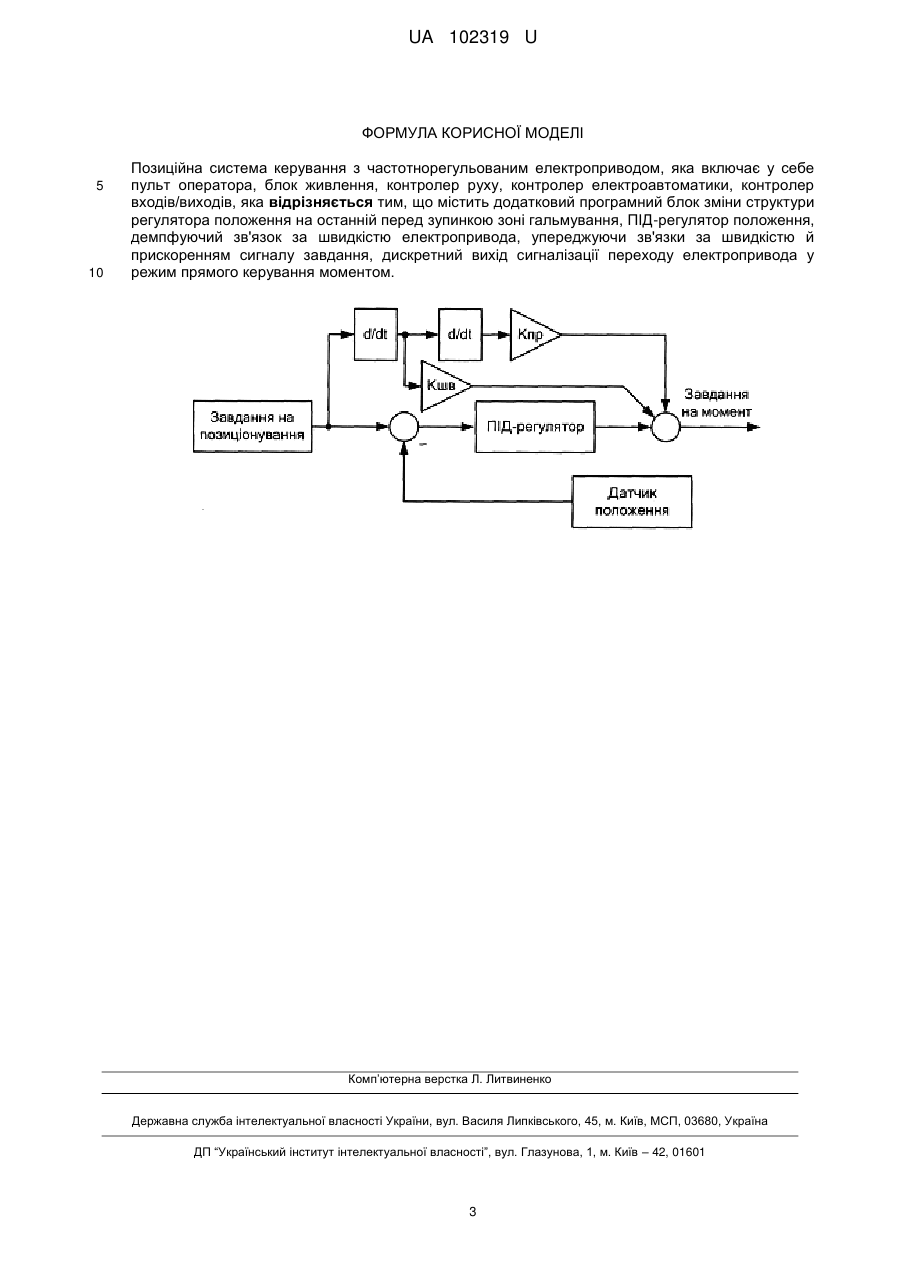
Позиційна система керування з частотнорегульованим електроприводом, яка включає у себе пульт оператора, блок живлення, контролер руху, контролер електроавтоматики, контролер входів/виходів, яка відрізняється тим, що містить додатковий програмний блок зміни структури регулятора положення на останній перед зупинкою зоні гальмування, ПІД-регулятор положення, демпфуючий зв'язок за швидкістю електропривода, упереджуючи зв'язки за швидкістю й прискоренням сигналу завдання, дискретний вихід сигналізації переходу електропривода у режим прямого керування моментом.
Текст
Реферат: Позиційна система керування з частотнорегульованим електроприводом включає у себе пульт оператора, блок живлення, контролер руху, контролер електроавтоматики, контролер входів/виходів, причому містить додатковий програмний блок зміни структури регулятора положення на останній перед зупинкою зоні гальмування, ПІД-регулятор положення, демпфуючий зв'язок за швидкістю електропривода, упереджуючи зв'язки за швидкістю й прискоренням сигналу завдання, дискретний вихід сигналізації переходу електропривода у режим прямого керування моментом. UA 102319 U (54) ПОЗИЦІЙНА СИСТЕМА КЕРУВАННЯ З ЧАСТОТНОРЕГУЛЬОВАНИМ ЕЛЕКТРОПРИВОДОМ UA 102319 U UA 102319 U 5 10 15 20 25 30 35 40 45 50 55 Корисна модель належить до галузі електротехніки, зокрема до систем позиційного керування електроприводами подач свердлильних, координатно-розточувальних, горизонтально-розточувальних, фрезерних й інших верстатів. Корисна модель може бути використана для задач підвищення точності позиціонування робочих органів металообробних верстатів. Відома система позиційного керування електроприводами [Система позиционного управления электроприводом А.С. СССР SU 1509826: G05В 11/01 /Д.Л. Браудо, С.М. Довгань, Н.Н. Казачковский и А.А. Мусиенко], використовується при керуванні електроприводами промислових роботів або прецизійних металорізальних верстатів з числовим програмним керуванням (ЧПК), що відпрацьовують монотонно змінювані дозовані позитивні (або негативні) завдання на переміщення робочого органа, яка складається із ПІ-регулятора, інформаційного комутатора, датчика положення, датчика струму, силового перетворювача. Підвищення швидкодії системи відбувається за рахунок звуження області її до відпрацьовування тільки монотонно зростаючих або тільки тих, що монотонно зменшуються. Сигнал завдання порівнюється з поточним значенням положення вала електродвигуна й виділяється модуль отриманого сигналу неузгодженості. Результуючий сигнал перетвориться в ПІ-регуляторі положення й отриманий сигнал порівнюється з поточним значенням швидкості обертання вала електродвигуна. Результат порівняння перетвориться в ПІ-регуляторі швидкості й надходить на перший інформаційний вхід комутатора, на інші три входи якого надходять вихідні сигнали відповідних джерел постійних сигналів. Вихідний сигнал комутатора через перший і другий ключі, стан яких визначається знаком впливу, що задає, надходить на відповідний вхід регулятора струму, у якому порівнюється зі струмом електродвигуна. Результат порівняння через підсилювач потужності впливає на електродвигун, змінюючи положення й швидкість обертання його вала. Спільні ознаки із корисною моделлю, що заявляється: - використання регульованого електропривода; - використання датчика положення; - використання регулятора положення. Недоліками наведеної системи позиційного керування електроприводами є: - необхідність використання датчика швидкості і контуру регулювання швидкості для збільшення діапазону регулювання, що ускладнює систему електропривода та збільшує його вартість; - використання звичайного ПІ-регулятора положення із видачею завдання на контур регулювання струму, що, при недостатній точності регулювання швидкості може призводити до коливань у точці позиціонування. Найбільш близьким технічним рішенням до корисної моделі, що заявляється обраною у якості прототипу, є система програмно-позиційного керування (СППК) [Новые возможности станка с системой управления ЛИР-581 / Плутахин Д.В., ОАО "СКБ ИС" - Ремонт, инновации, технологи, модернизация. Специализированный журнал. - М.: ООО "МедиаПром", 2011. - № 7 (65).], у якій вихід у задану позицію здійснюється послідовними переміщеннями за координатами, без руху за складною криволінійною траєкторією. Дана система складається із пульту оператора, блока живлення, контролерів руху, контролера електроавтоматики, контролера входів/виходів. Пульт оператора дозволяє обмінюватися інформацією з контролерами СППК й відображає на екрані поточні координати положення об'єкта й стан виконавчих пристроїв. Блок живлення призначений для стабілізованого живлення всіх модулів, що входять у СППК. Контролер руху призначений для безпосереднього керування приводами подач. Приймає команди від пульта оператора, контролює перетворювачі переміщень і здійснює керування зонами гальмування. Контролер електроавтоматики призначений для реалізації релейно-логічних схем керування електроавтоматикою верстата. Схема релейної логіки верстата створюється в стандартному LADDER редакторі (сходових діаграм) на комп'ютері й за допомогою USB-кабелю програмується в контролер електроавтоматики. Контролер входів/виходів призначений для збільшення кількості дискретних входів/виходів контролерів руху або контролера електроавтоматики. Спільні ознаки із корисною моделлю, що заявляється: - містить пульт оператора, що дозволяє обмінюватися інформацією з контролерами й відображає на екрані поточні координати положення об'єкта; - містить блок живлення, що призначений для стабілізованого живлення всіх модулів; - містить контролер руху, що призначений для безпосереднього керування електроприводами подач за зонами гальмування; 1 UA 102319 U 5 10 15 20 25 30 35 40 45 50 - містить контролер електроавтоматики, що призначений для реалізації релейно-логічних схем керування електроавтоматикою верстата; - контролер входів/виходів, що призначений для збільшення кількості дискретних входів/виходів. Недоліком наведеної системи позиційного керування електроприводами є недостатня точність позиціонування при наявності збурень у механічній частині які виникають при наявності дефектів механічних передач, роликових підшипників, наявності часток пилу та абразивних часток на елементах механічної передачі, погіршення змащування та таке інше. В основу корисної моделі поставлено задачу підвищення точності позиціонування при наявності збурень у механічній частині шляхом включення додаткового програмного блока для забезпечення зміни структури регулятора положення та зміни режиму керування електроприводам з режиму керування швидкістю на режим керування моментом при досягненні останньої перед зупинкою зони гальмування. Згаданий технічний результат при реалізації корисної моделі досягається тим, що змінена структура регулятора містить у своєму складі ПІД-регулятор положення, демпфуючий зв'язок за швидкістю електропривода для придушення коливань, а також, упереджуючи зв'язки за швидкістю й прискоренням сигналу завдання. Застосування подібної структури дозволяє: - забезпечити малі динамічну й статичну помилки як за каналом навантаження, так і за каналом керування й разом з тим розширити смугу пропущення електропривода за завданням; - застосовувати СППК для модернізації верстатів з більшими люфтами в механічних передачах і напрямних за рахунок відсутності замкнутого зворотного зв'язку за швидкістю; застосовувати більше дешеві електроприводи без зворотних зв'язків за частотою обертання із діапазоном регулювання швидкості близько 1:100 на основі загальнопромислових асинхронних двигунів і перетворювачів частоти, на відміну від контурних СЧПК, де необхідно використовувати сервоприводи з діапазоном не менш ніж 1:10000. Запропонований спосіб пояснюється наступним кресленням, де на кресленні наведена змінена структура регулятора, на якій прийнятті позначення: Кшв - коефіцієнт посилення за швидкістю сигналу завдання, Кпр - коефіцієнт посилення за прискоренням сигналу завдання. Позиційна система керування складається із пульта оператора, блока живлення, контролера руху, контролера електроавтоматики, контролера входів/виходів та додаткового програмного блока (креслення) у пульті оператора. Додатковий програмний блок при досягненні останньої перед зупинкою зони гальмування реалізує ПІ-регулятор положення із додаванням складових, які визначаються як перша та друга похідні від сигналу завдання на положення, та здійснює режим керування моментом електропривода. Позиційна система керування з частотнорегульованим електроприводом працює наступним чином. При позиціюванні використовуються так звані зони гальмування - це відстані до кінцевої точки позиціювання. У кожній зоні гальмування задається певна частота обертання вала двигуна, що буде тим менше, чим ближче зона гальмування до точки позиціювання. Швидкість переміщення не програмується й обумовлена тільки динамікою електроприводів. При наявності збурень у механічній частині (дефекти механічних передач, роликових підшипників, наявність часток пилу та абразивних часток на елементах механічної передачі, погіршення змащування та таке інше) знижується точність позиціонування. При досягненні останньої перед зупинкою зони гальмування система позиційного керування змінює структуру регулятора положення з пропорційного регулятора на регулятор, який містить у своєму складі ПІД-регулятор положення, демпфуючий зв'язок за швидкістю електропривода для придушення коливань, а також, упереджуючи зв'язки за швидкістю й прискоренням сигналу завдання. Також, шляхом видачі дискретного сигналу на частотнорегульований електропривод, який працює у режимі векторного керування швидкістю обертання, режим його роботи повинен змінитись на режим прямого керування моментом. Це дозволяє забезпечити малі динамічну й статичну помилки як за каналом навантаження, так і за каналом керування. Корисна модель дозволяє здійснити підвищення точності позиціонування при наявності збурень у механічній частині шляхом зміни структури регулятора положення та змінює режим керування електроприводам із режиму керування швидкістю на режим керування моментом при досягненні останньої перед зупинкою зони гальмування. 55 2 UA 102319 U ФОРМУЛА КОРИСНОЇ МОДЕЛІ 5 10 Позиційна система керування з частотнорегульованим електроприводом, яка включає у себе пульт оператора, блок живлення, контролер руху, контролер електроавтоматики, контролер входів/виходів, яка відрізняється тим, що містить додатковий програмний блок зміни структури регулятора положення на останній перед зупинкою зоні гальмування, ПІД-регулятор положення, демпфуючий зв'язок за швидкістю електропривода, упереджуючи зв'язки за швидкістю й прискоренням сигналу завдання, дискретний вихід сигналізації переходу електропривода у режим прямого керування моментом. Комп’ютерна верстка Л. Литвиненко Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
Назва патенту англійськоюPoint-to-point system with variable frequency drive
Автори англійськоюKalinov Andrii Petrovych, Martynenko Oleksandr Vitaliiovych
Назва патенту російськоюПозиционная система управления с частотно-регулируемым электроприводом
Автори російськоюКалинов Андрей Петрович, Мартыненко Александр Витальевич
МПК / Мітки
МПК: G05B 11/01, G01R 27/08
Мітки: керування, система, частотнорегульованим, електроприводом, позиційна
Код посилання
<a href="https://ua.patents.su/5-102319-pozicijjna-sistema-keruvannya-z-chastotnoregulovanim-elektroprivodom.html" target="_blank" rel="follow" title="База патентів України">Позиційна система керування з частотнорегульованим електроприводом</a>
Система керування багатодвигунним електроприводом постійного струму нахилу конвертора

Номер патенту: 71589
Опубліковано: 25.07.2012
Автори: Ширяєв Іван Миколайович, Куленцов Віктор Олександрович
МПК: H02P 6/00
Мітки: нахилу, конвертора, система, електроприводом, струму, керування, багатодвигунним, постійного
Формула / Реферат:
Система керування багатодвигунним електроприводом нахилу конвертера, яка містить встановлені на навісних редукторах електродвигуни постійного струму з живленням від індивідуальних перетворювачів, що містять регулятори струму кожного електродвигуна та регулятор швидкості принаймні одного електродвигуна, яка відрізняється тим, що у кожний перетворювач введено індивідуальний регулятор швидкості кожного електродвигуна, а систему керування...
Система керування електроприводом

Номер патенту: 63452
Опубліковано: 10.10.2011
Автори: Плугатар Олексій Петрович, Войтех Володимир Олександрович, Орел Олексій Віталійович, Волков Ігор Володимирович
МПК: B66B 1/00
Мітки: електроприводом, система, керування
Формула / Реферат:
Система керування електроприводом, що містить перетворювач електроенергії, який своїм силовим входом з'єднаний з мережею живлення, а силовим виходом з'єднаний з обмотками двигуна, яка відрізняється тим, що вона додатково містить GSM-модуль, антену, та мікроконтролер, який своїми функціональними виходами з'єднаний з керуючими входами перетворювача електроенергії, вхід мікроконтролера з'єднаний з виходом GSM-модуля, а вхід GSM-модуля з'єднаний...
Спосіб автоматичного керування слідкуючим електроприводом
Номер патенту: 71193
Опубліковано: 10.07.2012
Автор: Панкратов Анатолій Іванович
МПК: G05B 11/26
Мітки: електроприводом, керування, автоматичного, слідкуючим, спосіб
Формула / Реферат:
Спосіб автоматичного керування слідкуючим електроприводом, який полягає у визначенні сигналу помилки регулювання положення, формуванні по ньому сигналу керування й паралельної фаззі-корекції цього сигналу і її похідної, який відрізняється тим, що додатково здіснюють фаззі-корекцію сигналу керування по другій похідній помилці регулювання положення, затримують за часом сигнали помилки регулювання, її першої й другої похідних на час першого...
Система керування тяговим електроприводом змінного струму рудникових електровозів
Номер патенту: 20092
Опубліковано: 15.01.2007
Автори: Лебьодкін Сергій Вікторович, Гузов Едуард Семенович, Караманиць Федір Іванович, Сінчук Ігор Олегович, Зайцев Ігор Миколайович, Сінчук Олег Миколайович
МПК: H02M 5/00
Мітки: рудникових, струму, керування, система, електроприводом, електровозів, змінного, тяговим
Формула / Реферат:
Система керування тяговим електроприводом змінного струму рудникових електровозів, що містить пульт керування машиніста, з'єднувальні проводи, блок захисту і контролю роботи електроустаткування, два тягові асинхронні двигуни, яка відрізняється тим, що система керування забезпечена багаторівневим інвертором напруг з автономним джерелом живлення, при цьому багаторівневий інвертор включає електрично зв'язані з пультом керування два інверторні...
Пристрій для керування асинхронним електроприводом
Номер патенту: 70074
Опубліковано: 15.09.2004
Автори: Гісцова Тетяна Іванівна, Нарожний Віталій Васильович, Лученко Олег Олексійович, Кулік Анатолій Степанович, Фірсов Сергій Миколайович
МПК: H02P 21/00
Мітки: асинхронним, керування, пристрій, електроприводом
Формула / Реферат:
Пристрій для керування асинхронним електроприводом, що складається з асинхронного двигуна, з'єднаного через пружну передачу з виконавчим механізмом, послідовно з'єднаних між собою регулятора швидкості, перетворювача координат і перетворювача енергії, вихід якого підключений до статорної обмотки асинхронного двигуна, датчика кута, механічно зв'язаного з ротором асинхронного двигуна, задатчика реактивного струму, вихід якого підключений до...
Попередній патент: Спосіб інтегральної оцінки функціонального стану хворих на серцево-судинну патологію у поєднанні з остеоартрозом
Наступний патент: Пристрій контролю енергетичних параметрів тягових електродвигунів постійного струму рудникового електровоза
Випадковий патент: Спосіб і система для забезпечення впливу на насипний об'єм грейфера з піднімальним механізмом, що містить двомоторний привід