Спосіб автоматичного керування слідкуючим електроприводом

Формула / Реферат
Спосіб автоматичного керування слідкуючим електроприводом, який полягає у визначенні сигналу помилки регулювання положення, формуванні по ньому сигналу керування й паралельної фаззі-корекції цього сигналу і її похідної, який відрізняється тим, що додатково здіснюють фаззі-корекцію сигналу керування по другій похідній помилці регулювання положення, затримують за часом сигнали помилки регулювання, її першої й другої похідних на час першого узгодження сигналу положення із заданим, яке встановлюють рівним заданій швидкодії.
Текст
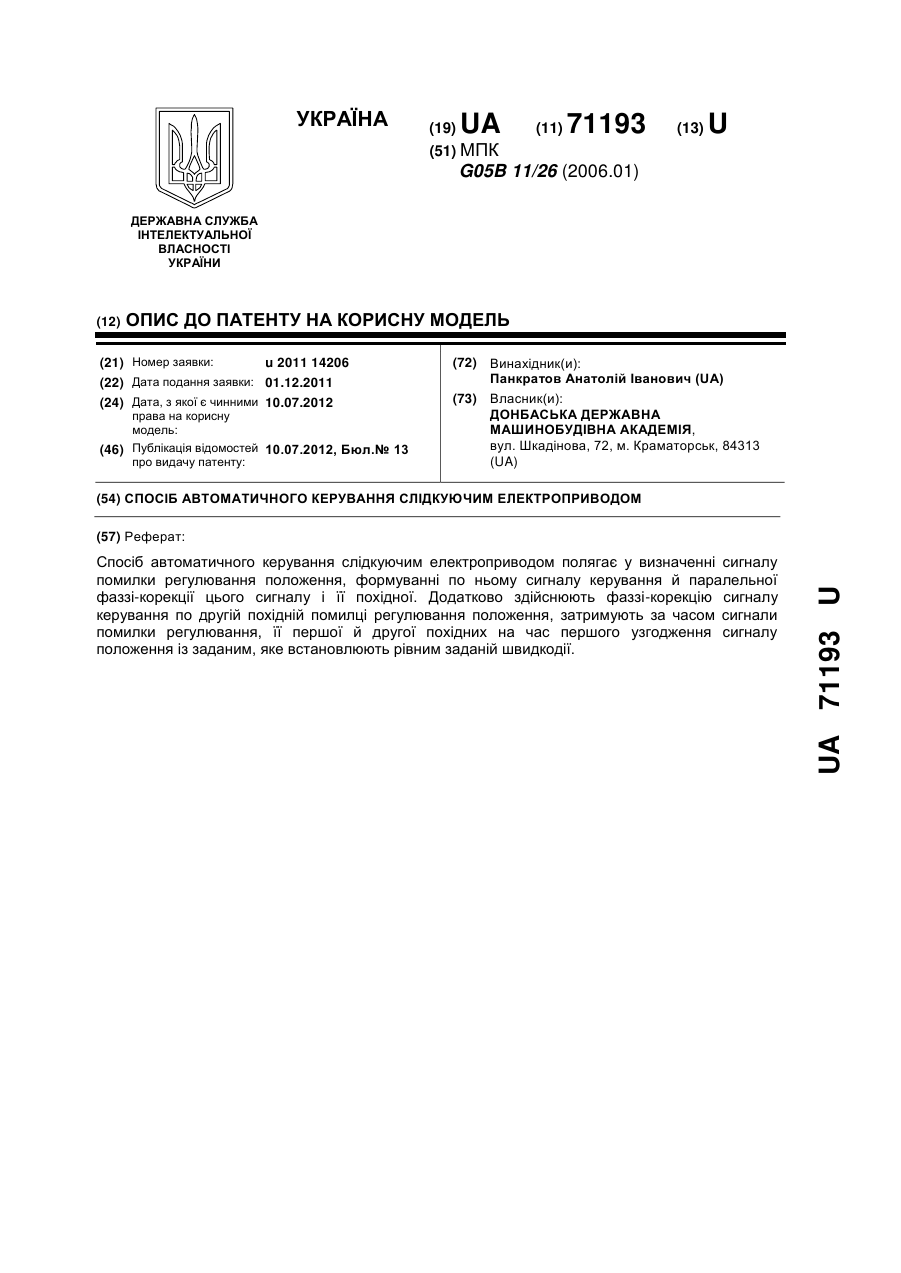
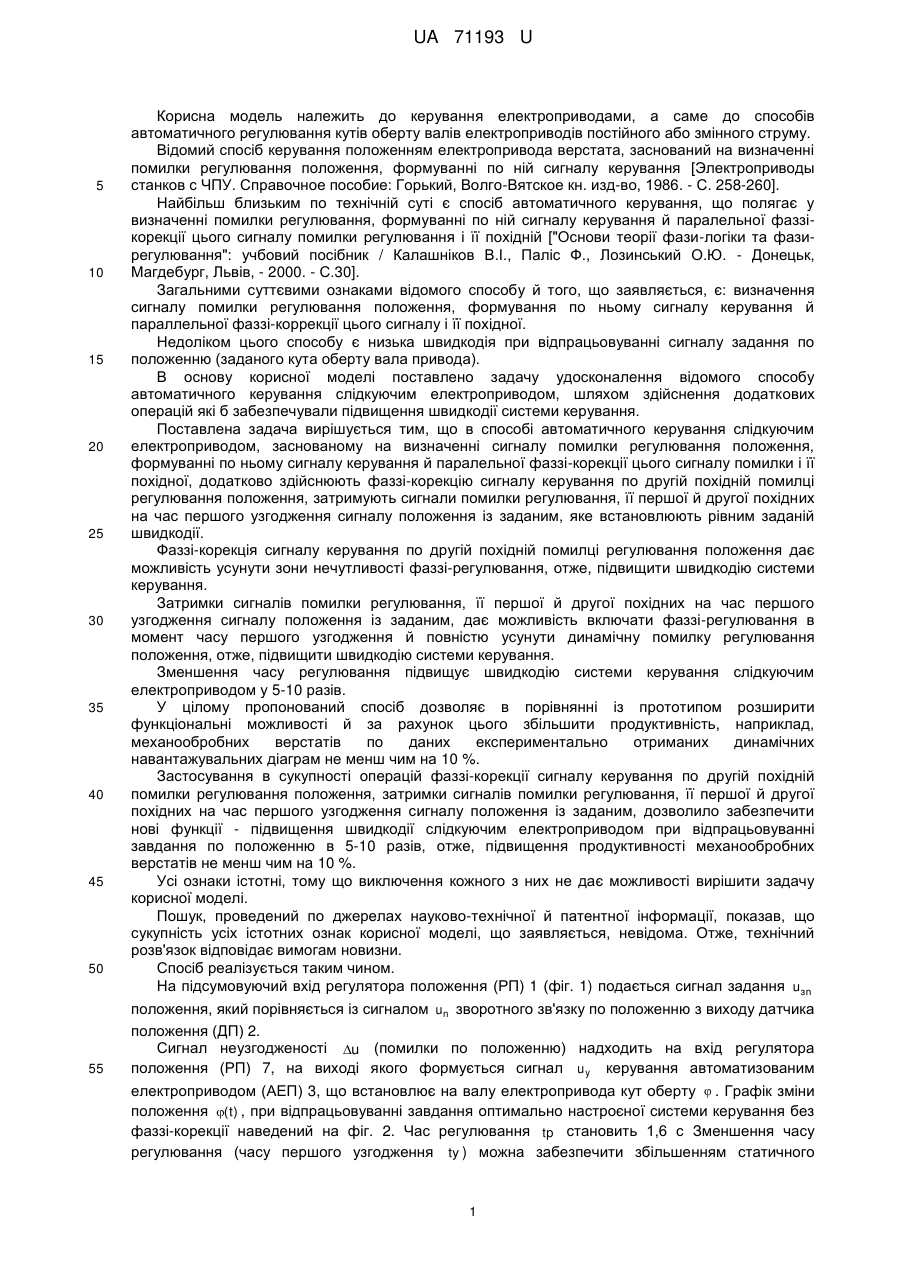
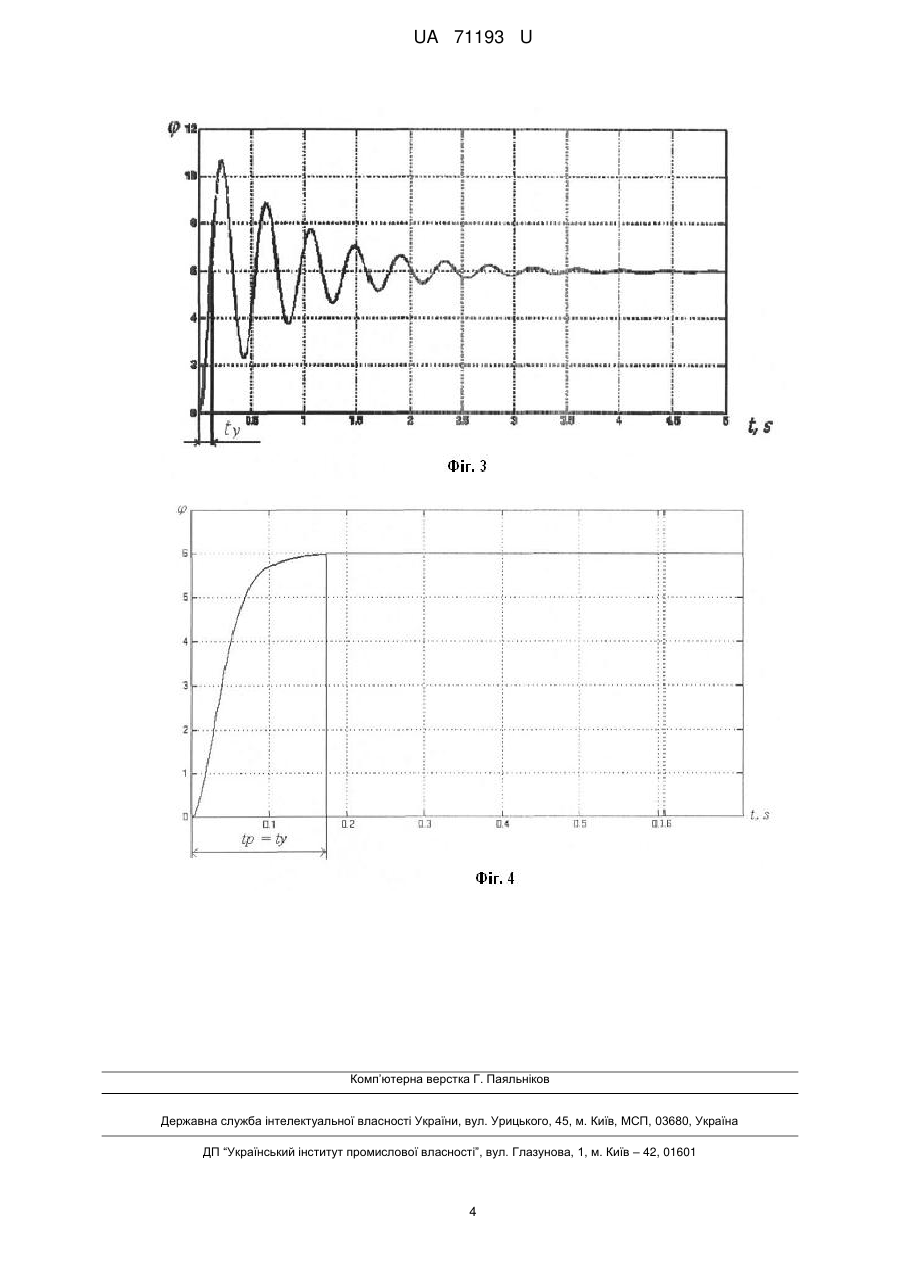
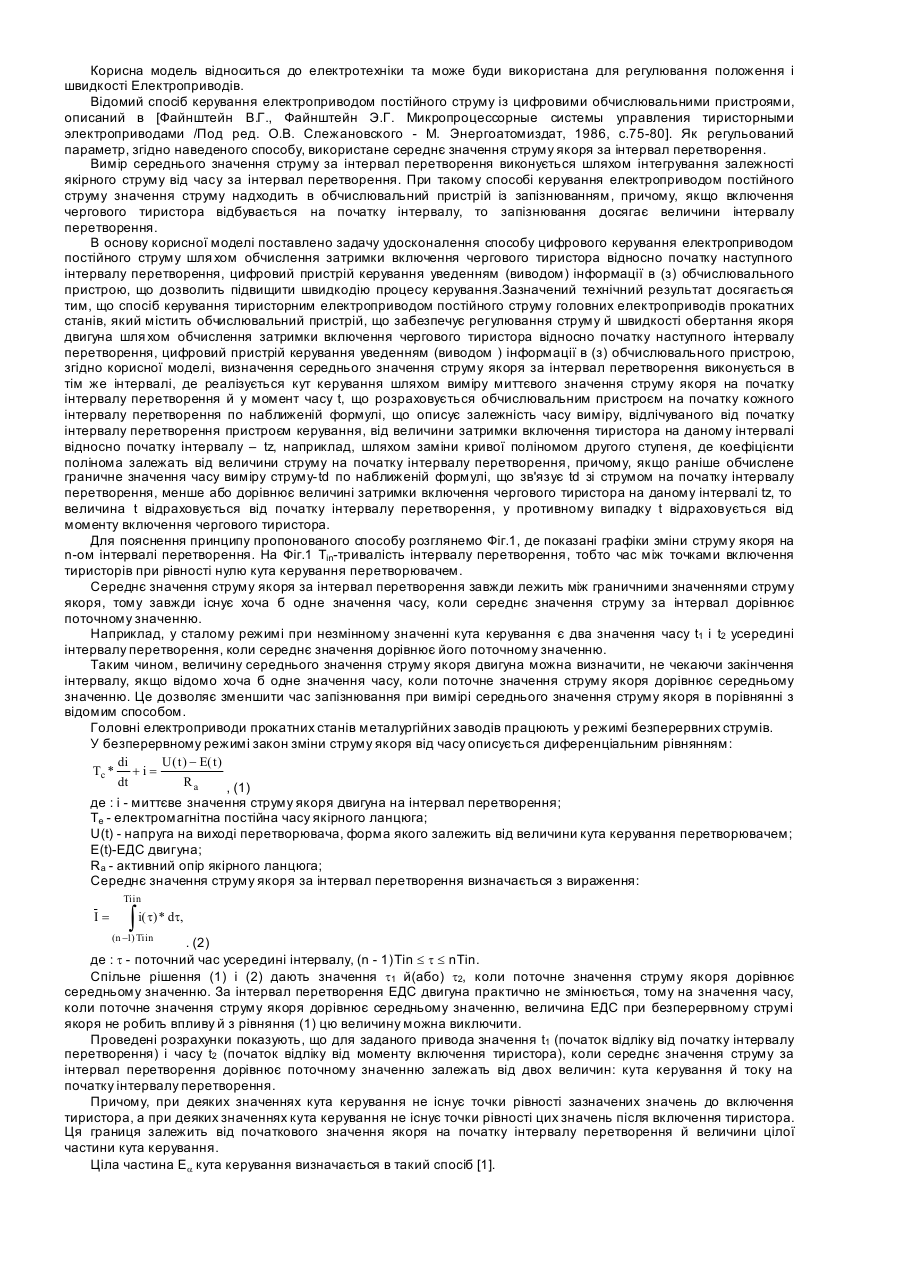
Реферат: UA 71193 U UA 71193 U 5 10 15 20 25 30 35 40 45 50 55 Корисна модель належить до керування електроприводами, а саме до способів автоматичного регулювання кутів оберту валів електроприводів постійного або змінного струму. Відомий спосіб керування положенням електропривода верстата, заснований на визначенні помилки регулювання положення, формуванні по ній сигналу керування [Электроприводы станков с ЧПУ. Справочное пособие: Горький, Волго-Вятское кн. изд-во, 1986. - С. 258-260]. Найбільш близьким по технічній суті є спосіб автоматичного керування, що полягає у визначенні помилки регулювання, формуванні по ній сигналу керування й паралельної фаззікорекції цього сигналу помилки регулювання і її похідній ["Основи теорії фази-логіки та фазирегулювання": учбовий посібник / Калашніков В.І., Паліс Ф., Лозинський О.Ю. - Донецьк, Магдебург, Львів, - 2000. - С.30]. Загальними суттєвими ознаками відомого способу й того, що заявляється, є: визначення сигналу помилки регулювання положення, формування по ньому сигналу керування й параллельної фаззі-коррекції цього сигналу і її похідної. Недоліком цього способу є низька швидкодія при відпрацьовуванні сигналу задання по положенню (заданого кута оберту вала привода). В основу корисної моделі поставлено задачу удосконалення відомого способу автоматичного керування слідкуючим електроприводом, шляхом здійснення додаткових операцій які б забезпечували підвищення швидкодії системи керування. Поставлена задача вирішується тим, що в способі автоматичного керування слідкуючим електроприводом, заснованому на визначенні сигналу помилки регулювання положення, формуванні по ньому сигналу керування й паралельної фаззі-корекції цього сигналу помилки і її похідної, додатково здійснюють фаззі-корекцію сигналу керування по другій похідній помилці регулювання положення, затримують сигнали помилки регулювання, її першої й другої похідних на час першого узгодження сигналу положення із заданим, яке встановлюють рівним заданій швидкодії. Фаззі-корекція сигналу керування по другій похідній помилці регулювання положення дає можливість усунути зони нечутливості фаззі-регулювання, отже, підвищити швидкодію системи керування. Затримки сигналів помилки регулювання, її першої й другої похідних на час першого узгодження сигналу положення із заданим, дає можливість включати фаззі-регулювання в момент часу першого узгодження й повністю усунути динамічну помилку регулювання положення, отже, підвищити швидкодію системи керування. Зменшення часу регулювання підвищує швидкодію системи керування слідкуючим електроприводом у 5-10 разів. У цілому пропонований спосіб дозволяє в порівнянні із прототипом розширити функціональні можливості й за рахунок цього збільшити продуктивність, наприклад, механообробних верстатів по даних експериментально отриманих динамічних навантажувальних діаграм не менш чим на 10 %. Застосування в сукупності операцій фаззі-корекції сигналу керування по другій похідній помилки регулювання положення, затримки сигналів помилки регулювання, її першої й другої похідних на час першого узгодження сигналу положення із заданим, дозволило забезпечити нові функції - підвищення швидкодії слідкуючим електроприводом при відпрацьовуванні завдання по положенню в 5-10 разів, отже, підвищення продуктивності механообробних верстатів не менш чим на 10 %. Усі ознаки істотні, тому що виключення кожного з них не дає можливості вирішити задачу корисної моделі. Пошук, проведений по джерелах науково-технічної й патентної інформації, показав, що сукупність усіх істотних ознак корисної моделі, що заявляється, невідома. Отже, технічний розв'язок відповідає вимогам новизни. Спосіб реалізується таким чином. На підсумовуючий вхід регулятора положення (РП) 1 (фіг. 1) подається сигнал задання uзn положення, який порівняється із сигналом un зворотного зв'язку по положенню з виходу датчика положення (ДП) 2. Сигнал неузгодженості u (помилки по положенню) надходить на вхід регулятора положення (РП) 7, на виході якого формується сигнал u y керування автоматизованим електроприводом (АЕП) 3, що встановлює на валу електропривода кут оберту . Графік зміни положення (t) , при відпрацьовуванні завдання оптимально настроєної системи керування без фаззі-корекції наведений на фіг. 2. Час регулювання tp становить 1,6 с Зменшення часу регулювання (часу першого узгодження ty ) можна забезпечити збільшенням статичного 1 UA 71193 U 5 коефіцієнта передачі регулятора положення 7, але це призводить до виникнення перерегулювання (фіг. 3), що неприпустимо за технологією. Паралельна фаззі-корекція регулятора положення за допомогою фаззі-контролера (ФК) 4 усуває перерегулювання для заданого зменшеного часу регулювання tp ty . Фаззі-контролер (ФК) 4 управляється по трьох вхідних сигналах (фіг. 1). На перший вхід фаззі-контролера 4 подається сигнал u відхилення від завдання по положенню із затримкою часу t t y блока тимчасової затримки 5. На другий вхід фаззі-контролера 4 подається сигнал першої похідної u відхилення від завдання по положенню з виходу блока диференціювання 6, через блок t тимчасової затримки 7, час затримки якого t t y . На третій вхід фаззі-контролера 4 подається 10 сигнал другої похідної 2u t 2 відхилення від завдання по положенню з виходу блока диференціювання 8, через блок тимчасової затримки 9, час затримки якого t t y . 15 20 25 На фіг. 4 наведений графік зміни кута оберту вала слідкуючого електропривода з пропонованим способом автоматичного керування. На графіку видно, що після фаззі-корекції перерегулювання зникло, а час регулювання зменшився в порівнянні із графіком фіг. 2 приблизно в 10 разів. Розроблений спосіб може використовуватися на всіх промислових підприємствах України, де використовуються позиційні електроприводи, наприклад у машинобудуванні на механообробних верстатах з електроприводами механізмів подачі, електроприводах роботів, маніпуляторів, у гірничодобувній промисловості в електроприводах повороту екскаваторів, електроприводах ліфтів, підйомників, електроприводах систем наведення ракет "земля-повітря" на рухомий об'єкт. Економічний ефект за рахунок пропонованого способу автоматичного керування слідкуючим електроприводом, наприклад, на важкому токарському верстаті за рахунок підвищення його продуктивності становить не менше 60 тис. грн. у рік. Перевагою пропонованого способу автоматичного керування слідкуючим електроприводом у порівнянні із прототипом є підвищення швидкодії системи керування електроприводом. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 30 35 Спосіб автоматичного керування слідкуючим електроприводом, який полягає у визначенні сигналу помилки регулювання положення, формуванні по ньому сигналу керування й паралельної фаззі-корекції цього сигналу і її похідної, який відрізняється тим, що додатково здіснюють фаззі-корекцію сигналу керування по другій похідній помилці регулювання положення, затримують за часом сигнали помилки регулювання, її першої й другої похідних на час першого узгодження сигналу положення із заданим, яке встановлюють рівним заданій швидкодії. 2 UA 71193 U 3 UA 71193 U Комп’ютерна верстка Г. Паяльніков Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 4
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for servo driver automatic control
Автори англійськоюPankratov Anatolii Ivanovych
Назва патенту російськоюСпособ автоматического управления следящим электроприводом
Автори російськоюПанкратов Анатолий Иванович
МПК / Мітки
МПК: G05B 11/26
Мітки: автоматичного, слідкуючим, керування, спосіб, електроприводом
Код посилання
<a href="https://ua.patents.su/6-71193-sposib-avtomatichnogo-keruvannya-slidkuyuchim-elektroprivodom.html" target="_blank" rel="follow" title="База патентів України">Спосіб автоматичного керування слідкуючим електроприводом</a>
Спосіб цифрового керування електроприводом постійного струму головних електроприводів прокатних станів
Номер патенту: 32089
Опубліковано: 12.05.2008
Автори: Файнштейн Вілен Григорович, Цвітнов Віталій Олександрович
МПК: H02P 5/00
Мітки: електроприводів, постійного, керування, струму, спосіб, електроприводом, цифрового, станів, прокатних, головних
Формула / Реферат:
Спосіб цифрового керування електроприводом постійного струму головних електроприводів прокатних станів, що містить обчислювальний пристрій, що забезпечує регулювання струму й швидкості обертання якоря двигуна шляхом обчислення затримки включення чергового тиристора відносно початку наступного інтервалу перетворення, цифровий пристрій керування уведенням (виводом) інформації в (з) обчислювального пристрою, який відрізняється тим, що визначення...
Рульове керування з електроприводом

Номер патенту: 36755
Опубліковано: 10.11.2008
Автор: Броварець Олександр Олександрович
МПК: B62D 3/00
Мітки: керування, рульове, електроприводом
Формула / Реферат:
Рульове керування з електроприводом, що містить рульовий привід, виконаний у вигляді рульової трапеції та поперечної тяги з шарнірами на кінцях, кожний з яких зв'язаний з поворотним важелем, яке відрізняється тим, що рульовий привід виконаний у вигляді з'єднання вал-гайка, вал якого сполучений з електродвигуном, а лонжерони рами транспортного засобу шарнірно сполучені з віссю керованих коліс таким чином, що винесені за зони їх обертання.
Пристрій для керування асинхронним електроприводом
Номер патенту: 70074
Опубліковано: 15.09.2004
Автори: Гісцова Тетяна Іванівна, Фірсов Сергій Миколайович, Нарожний Віталій Васильович, Кулік Анатолій Степанович, Лученко Олег Олексійович
МПК: H02P 21/00
Мітки: керування, електроприводом, пристрій, асинхронним
Формула / Реферат:
Пристрій для керування асинхронним електроприводом, що складається з асинхронного двигуна, з'єднаного через пружну передачу з виконавчим механізмом, послідовно з'єднаних між собою регулятора швидкості, перетворювача координат і перетворювача енергії, вихід якого підключений до статорної обмотки асинхронного двигуна, датчика кута, механічно зв'язаного з ротором асинхронного двигуна, задатчика реактивного струму, вихід якого підключений до...
Пристрій автоматичного керування в системі з пружним зв’язком
Номер патенту: 30618
Опубліковано: 11.03.2008
Автори: Сергієнко Сергій Анатолійович, Коваль Наталія Василівна, Зачепа Юрій Володимирович, Коваль Віталій Анатолійович
МПК: H02B 5/00
Мітки: системі, пристрій, автоматичного, пружним, зв'язком, керування
Формула / Реферат:
Пристрій автоматичного керування в системі з пружним зв'язком, що містить регулятор швидкості робочого органа механізму, вихід якого через фільтр з'єднано з регулятором моменту пружності, регулятор швидкості електродвигуна, вихід якого також через фільтр з'єднано з регулятором струму, перетворювач та об'єкт керування, який відрізняється тим, що в систему додатково введено задавач положення, який з'єднано із першим входом релейного регулятора...
Спосіб керування електроприводом штангової глибинонасосної установки
Номер патенту: 89737
Опубліковано: 25.02.2010
Автори: Калужний Богдан Семенович, Мартинчук Анастасія Данилівна, Маляр Андрій Васильович, Молнар Василь Васильович
МПК: E21B 43/00
Мітки: спосіб, штангової, керування, електроприводом, глибинонасосної, установки
Формула / Реферат:
Спосіб керування електроприводом штангової глибинонасосної установки, згідно з яким будують розгорнуту динамограму верстата-гойдалки як залежність зусилля в полірованому штоці від часу, визначають коефіцієнт заповнення циліндра глибинного насоса за різницею площ фігур, окреслених динамограмою, та відповідно до значення коефіцієнта змінюють швидкість обертання привідного двигуна верстата-гойдалки, який відрізняється тим, що розгорнуту...
Попередній патент: Розподільний механізм пароповітряних штампувальних молотів подвійної дії
Наступний патент: Двоконтурна зубчата передача неевольвентного зовнішнього зачеплення
Випадковий патент: Засувка