Адаптивна система управління швидкістю обертання радіолокаційної антени
Номер патенту: 103634
Опубліковано: 25.12.2015
Автори: Симонов Володимир Федорович, Білоконська Юлія Валентинівна
Формула / Реферат
Адаптивна система управління швидкістю обертання радіолокаційної антени, що містить задатчик кута повороту антени, підключений до входу, механічно пов'язаного з виконавчим механізмом датчика кута повороту антени, вихід якого через фазовий детектор підключений до першого входу порогового блока, другий вхід якого з'єднаний з виходом задатчика величини сектора огляду, а вихід з'єднаний з першим входом суматора, другий вхід якого підключений до виходу датчика швидкості обертання антени, блок формування команд управління, вихід якого підключений до першого входу виконавчого механізму, другий вхід якого через комутатор з'єднаний з виходом першого формувача імпульсів, а вихід механічно з'єднаний з другим входом датчика кута повороту антени та з першим входом датчика швидкості обертання антени, другий вхід якого підключений до виходу задатчика швидкості сканування, блок синхронізації, перший вхід якого так само, як і вхід другого формувача імпульсів, підключений до виходу порогового блока, а вихід блока синхронізації підключений до першого входу дільника частоти, до другого входу якого підключений генератор тактових імпульсів РЛС, вихід дільника частоти з'єднаний з першим входом часового селектора, другий вхід якого з'єднаний з виходом другого формувача імпульсів, а вихід з'єднаний з входом першого формувача імпульсів, а також послідовно з'єднані генератор пилкоподібної напруги і третій формувач імпульсів, вихід якого з'єднаний з другим входом блока синхронізації, а вхід генератора пилкоподібної напруги підключений до виходу часового селектора, яка відрізняється тим, що в неї введений ПІД-регулятор, перший вхід якого з'єднаний з виходом суматора, а вихід - з блоком формування команд управління, ПІД-регулятор другим входом з'єднаний з фазі-блоком, котрий, в свою чергу, першим входом з’єднаний з виходом суматора, другим входом - з виходом блока диференціювання, вхід якого з'єднаний з виходом суматора.
Текст
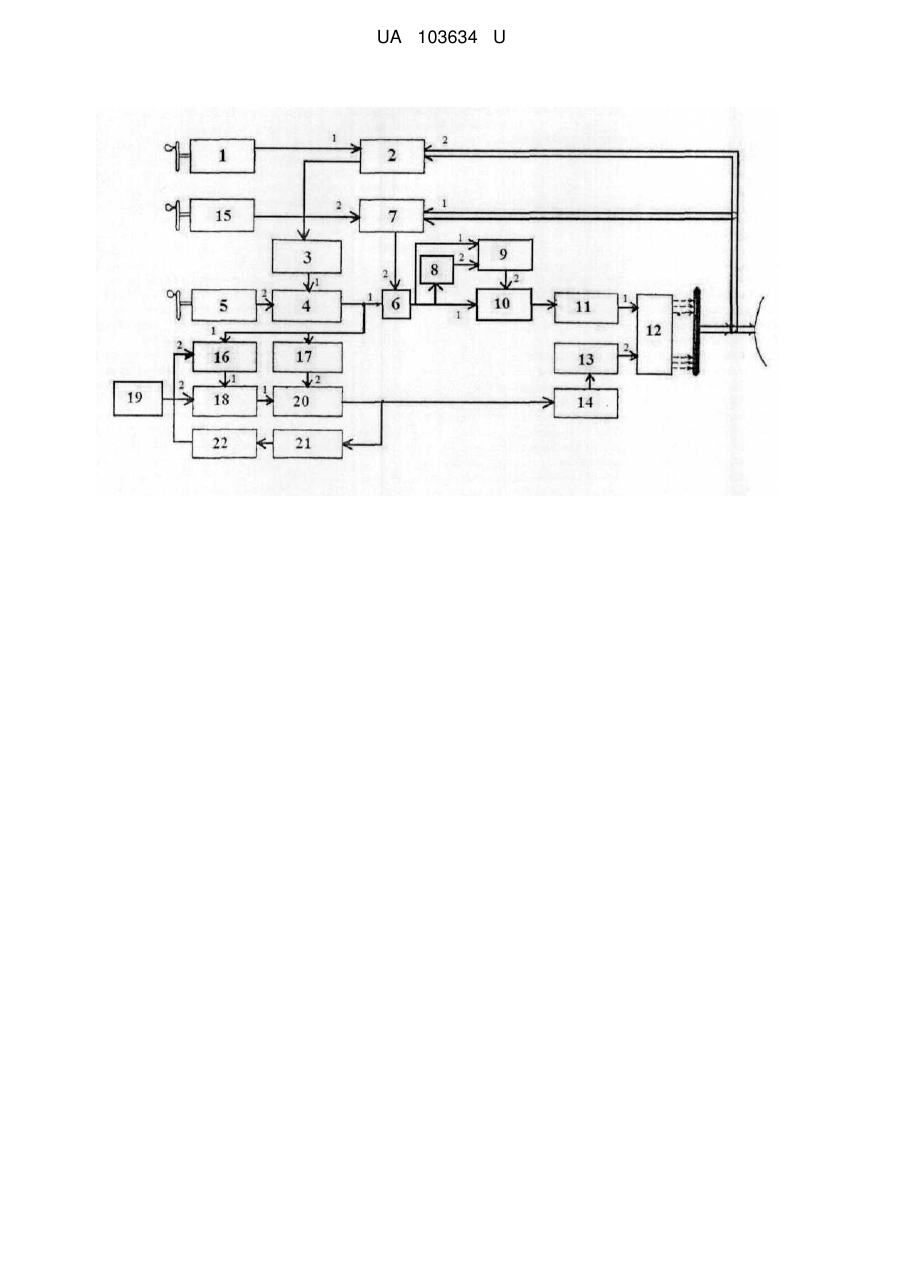
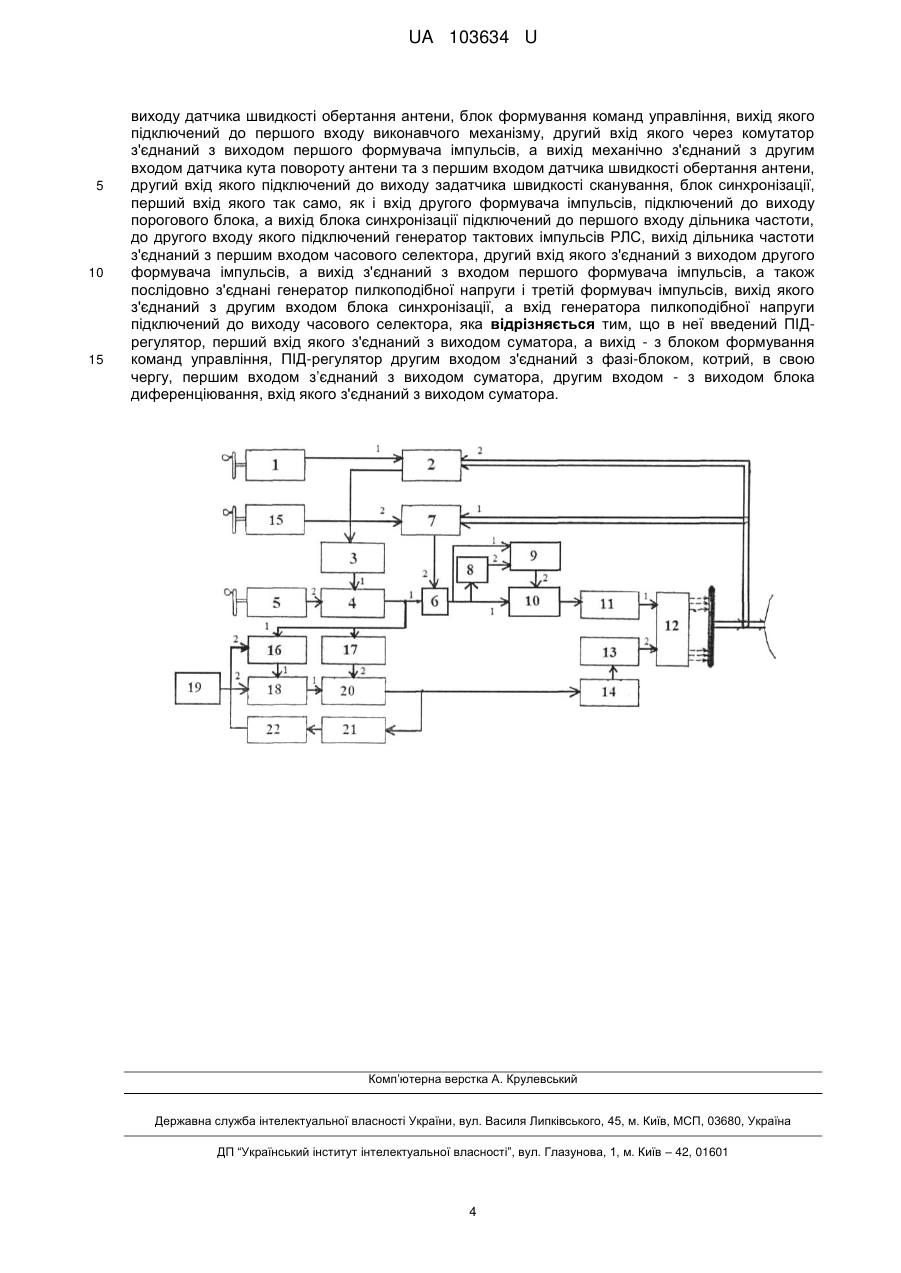
Реферат: Адаптивна система управління швидкістю обертання радіолокаційної антени містить задатчик кута повороту антени, підключений до входу механічно пов'язаного з виконавчим механізмом датчика кута повороту антени, вихід якого через фазовий детектор підключений до першого входу порогового блока, другий вхід якого з'єднаний з виходом задатчика величини сектора огляду, а вихід з'єднаний з першим входом суматора, другий вхід якого підключений до виходу датчика швидкості обертання антени, блок формування команд управління, вихід якого підключений до першого входу виконавчого механізму, другий вхід якого через комутатор з'єднаний з виходом першого формувача імпульсів, а вихід механічно з'єднаний з другим входом датчика кута повороту антени та з першим входом датчика швидкості обертання антени, другий вхід якого підключений до виходу задатчика швидкості сканування, блок синхронізації, перший вхід якого так само, як і вхід другого формувача імпульсів, підключений до виходу порогового блока, а вихід блока синхронізації підключений до першого входу дільника частоти, до другого входу якого підключений генератор тактових імпульсів РЛС, вихід дільника частоти з'єднаний з першим входом часового селектора, другий вхід якого з'єднаний з виходом другого формувача імпульсів, а вихід з'єднаний з входом першого формувача імпульсів, а також послідовно з'єднані генератор пилкоподібної напруги і третій формувач імпульсів, вихід якого з'єднаний з другим входом блока синхронізації, а вхід генератора пилкоподібної напруги підключений до виходу часового селектора. В неї введений ПІДрегулятор, перший вхід якого з'єднаний з виходом суматора, а вихід - з блоком формування команд управління, ПІД-регулятор другим входом з'єднаний з фазі-блоком, котрий, в свою чергу, першим входом з'єднаний з виходом суматора, другим входом - з виходом блока диференціювання, вхід якого з'єднаний з виходом суматора. UA 103634 U (54) АДАПТИВНА СИСТЕМА УПРАВЛІННЯ ШВИДКІСТЮ ОБЕРТАННЯ РАДІОЛОКАЦІЙНОЇ АНТЕНИ UA 103634 U UA 103634 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до радіолокаційних систем і має воєнне та цивільне призначення. Одним з перших застосувань радіолокації є пошук та попереднє виявлення літальних апаратів (ЛА). На борту ЛА радіолокація використовується як навігація. Відома система управління антеною, яка взята за аналог, що містить блок суматора, на перший вхід якого йде напруга, що задає кутове положення антени, на другий вхід йде вихідна напруга датчика-приймача і з'єднаний з блоком регулятора, блок підсилювача потужності та блок антени з двигуном, з'єднаний з датчиком-приймачем (Аналог запропонованої системи був взятий із наступного матеріалу: Соколов Ю.Н. Компьютерное проектирование ПИД-регуляторов [Текст]. /Ю.Н.Соколов // Авиационно-космическая техника и технология. - 2010. - № 1(68) - С. 43-51). Головним недоліком даної системи є погіршення точності стабілізації кутової швидкості антени при зміні її параметрів, а також задавальних і збурювальних дій. Найбільш близькою до запропонованої є система, взята за прототип, що містить задатчик кута повороту антени, підключений до входу механічно пов'язаного з виконавчим механізмом датчика кута повороту антени, вихід якого через фазовий детектор підключений до першого входу порогового блока, другий вхід якого з'єднаний з виходом задатчика величини сектора огляду, а вихід з'єднаний з першим входом суматора, другий вхід якого підключений до виходу датчика швидкості обертання антени, а вихід з'єднаний зі входом блока формування команд управління, вихід якого підключений до першого входу виконавчого механізму, другий вхід якого через комутатор з'єднаний з виходом першого формувача імпульсів, а вихід механічно з'єднаний з першим входом датчика швидкості обертання антени, другим вхід якого підключений до виходу задатчика швидкості сканування, блок синхронізації, перший вхід якого, так само, як і вхід другого формувача імпульсів, підключений до виходу порогового блока, а вихід підключений до першого входу дільника частоти, до другого входу якого підключений генератор тактових імпульсів PЛC, вихід дільника частоти з'єднаний з першим входом часового селектора, другий вхід якого з'єднаний з виходом другого формувача імпульсів, а вихід з'єднаний з входом першого формувача імпульсів, а також послідовно з'єднані генератор пилкоподібної напруги і третій формувач імпульсів, вихід якого через третій формувач імпульсів з'єднаний з другим входом блока синхронізації, а вхід генератора пилкоподібної напруги підключений до виходу часового селектора (Патент SU 1 840 909 А1. МПК G01S 13/02 (2006.01). Устройство для управления движением антенны радиолокационной станции. Заявка: 2253609/07, 19.03.1979. Опубликовано: 27.08.2014 Бюл. № 24). Недоліком даної системи є низька адаптованість системи до зміни параметрів системи і характеру зовнішніх впливів. Задачею корисної моделі є забезпечення точності стабілізації кутової швидкості системи при зміні параметрів системи і зовнішніх впливів. Поставлена задача вирішується тим, що в адаптивну систему управління швидкістю обертання радіолокаційної антени, що містить задатчик кута повороту антени, підключений до входу механічно пов'язаного з виконавчим механізмом датчика кута повороту антени, вихід якого через фазовий детектор підключений до першого входу порогового блока, другий вхід якого з'єднаний з виходом задатчика величини сектора огляду, а вихід з'єднаний з першим входом суматора, другий вхід якого підключений до виходу датчика швидкості обертання антени, а вихід з'єднаний зі входом блока формування команд управління, вихід якого підключений до першого входу виконавчого механізму, другий вхід якого через комутатор з'єднаний з виходом першого формувача імпульсів, а вихід механічно з'єднаний з другим входом датчика кута повороту антени та з першим входом датчика швидкості обертання антени, другий вхід якого підключений до виходу задатчика швидкості сканування, блок синхронізації, перший вхід якого, так само, як і вхід другого формувача імпульсів, підключений до виходу порогового блока, а вихід підключений до першого входу дільника частоти, до другого входу якого підключений генератор тактових імпульсів РЛС, вихід дільника частоти з'єднаний з першим входом часового селектора, другий вхід якого з'єднаний з виходом другого формувача імпульсів, а вихід з'єднаний з входом першого формувача імпульсів, а також послідовно з'єднані генератор пилкоподібної напруги і третій формувач імпульсів, вихід якого через третій формувач імпульсів з'єднаний з другим входом блока синхронізації, а вхід генератора пилкоподібної напруги підключений до виходу часового селектора, згідно з корисною моделлю введений ПІД-регулятор, перший вхід якого з'єднаний з ВИХОДОМ суматора, а вихід з блоком формування команд управління, ПІД-регулятор другим входом з'єднаний з фазі-блоком, котрий, в свою чергу, першим входом з'єднаний з виходом суматора, другим входом - з виходом блока диференціювання, вхід якого з'єднаний з виходом суматора. Принцип дії запропонованої системи пояснюється блок-схемою, показаною на кресленні. 1 UA 103634 U 5 10 15 20 25 30 35 40 45 50 55 60 До адаптивної системи управління швидкістю обертання радіолокаційної антени входять задатчик кута повороту антени 1, підключений до першого входу механічно пов'язаного з виконавчим механізмом датчика кута повороту антени 2, вихід якого через фазовий детектор 3 підключений до першого входу порогового блока 4, другий вхід якого з'єднаний з виходом задатчика величини сектора огляду 5, а вихід з'єднаний з першим входом суматора 6, другий вхід якого підключений до виходу датчика швидкості обертання антени 7, а вихід суматора 6 з'єднаний з входом блока диференціювання 8 та першим входом фазі-блока 9, другий вхід якого з'єднаний з виходом блока диференціювання 8, а вихід з другим входом ПІД-регулятора 10, перший вхід якого з'єднаний з виходом суматора 6, а вихід зі входом блока формування команд управління 11, вихід якого підключений до першого входу виконавчого механізму 12, другий вхід якого через комутатор 13 з'єднаний з виходом першого формувача імпульсів 14, а вихід механічно з'єднаний з другим входом датчика кута повороту антени 2 та першим входом датчика швидкості обертання антени 7, другий вхід якого підключений до виходу задатчика швидкості сканування 15, блок синхронізації 16, перший вхід якого так само, як і вхід другого формувача імпульсів 17, підключений до виходу порогового блока 4, а вихід блока синхронізації 16 підключений до першого входу дільника частоти 18, до другого входу якого підключений генератор тактових імпульсів РЛС 19, вихід дільника частоти 18 з'єднаний з першим входом часового селектора 20, другий вхід якого з'єднаний з виходом другого формувача імпульсів 17, а вихід з'єднаний з входом першого формувача імпульсів 14, генератор пилкоподібної напруги 21, вихід якого через третій формувач імпульсів 22 з'єднаний з другим входом блока синхронізації 16, а вхід підключений до виходу часового селектора 20. Система працює таким чином. На вхід системи задатчиками задаються параметри руху антени. Поворотом задатчика кута повороту антени 1, в якості якого використовується синусно-косинусний оборотний трансформатор (СКОТ), задасться пеленг, щодо якого антена повинна здійснювати сканування. Синусна і косинусна складові заданого кута з обмоток задатчика куга повороту антени 1 надходять на живлення статорних обмоток СКВТ-датчика кута повороту антени 2, з роторної обмотки якого напруги, пропорційна різниці заданого і істинного кутів повороту антени, подається на вхід фазового детектора 3. Позитивна, або негативна напруга, залежно від знака неузгодженості між істинним і заданим значеннями кута повороту антени, надходить на вхід порогового блока 4, який встановлюється в одне з двох можливих положень відповідно до полярності сигналу на вході. Вихідна напруга порогового блока 4 може бути двополярна. Вона задає напрямок обертання антени в одну, або в іншу сторону від заданого пеленга і подається на перший вхід суматора 6, входи блока синхронізації 16 і другого формувача імпульсів 17. На другий вхід суматора 6 надходить різниця напруг між напругою, пропорційною заданій швидкості в секторі сканування (з задатчика швидкості сканування 15) і напругою, пропорційною дійсній швидкості антени (з датчика швидкості обертання антени 7). З виходу суматора 6 подається напруга помилки на вхід фазі-блока 9 та похідна помилки через блок диференціювання 8 та виконується налаштування коефіцієнтів підсилення КП, КІ та КД ПІД регулятора 10. З виходу ПІД регулятора 10 напруга подається на вхід блока формування команди управління 11 виконавчого механізму 12 на лінійному асинхронному двигуні для посилення і перетворення її до величини напруги, достатньої для живлення основних індикаторів лінійного асинхронного двигуна. В залежності від знаку при вході блок формування команд управління 11 виробляє на виході трифазну напругу з прямим, або зворотним чергуванням фаз, завдяки чому основні індуктори виробляють ковзне магнітне поле одного, або іншого напрямку, яке, впливаючи на рухому частину антени, обертає її в одну, або в іншу сторону. Проте потужність основних індукторів виконавчого механізму 12 не достатня для забезпечення швидкої зміни напряму обертання (реверса) антени. Сигнали з виходу порогового блока 4 одночасно з подачею їх на перший вхід суматора 6 подаються на вхід другого формувача імпульсів 17, на виході якого формуються імпульси відповідної полярності, які дозволяють через часовий селектор роботу форсуючих індукторів виконавчого механізму 12 на границі робочого сектора. Однак різнополярні імпульси на виході часового селектора 20, які включають форсуючі індуктори виконавчого механізму 12 для швидкого реверсу антени, на границях робочого сектора з'являються тільки в моменти співпадання імпульсів в часі на обох входах часового селектора 20 сигналів з другого формувача імпульсів 17 та генератора тактових імпульсів РЛС 19, які надходять на другий вхід часового селектора 20 через дільник частоти 18. Дільник частоти 18 перетворює сигнали генератора тактових імпульсів РЛС 19, який має високу частоту (до декількох тисяч герц), в сигнал з частотою, яка дорівнює частоті сканування антени. 2 UA 103634 U 5 10 15 20 25 30 35 40 45 50 Період проходження синхронізуючих сигналів на виході дільника частоти 18 незначно перевищує половину періоду сканування антени (без синхронізації). Тому звичайне входження системи в синхронізацію займає деякий час (до декількох десятків періодів сканування антени). Для швидкого первісного входу системи управління рухом антени РЛС в синхронізацію призначений блок синхронізації 16. При першому приході антени на границю робочого сектора спрацьовує пороговий блок 4, імпульс з його виходу подається на блок синхронізації 16. Через заданий час t, необхідний для стійкої роботи системи в режимі синхронізації, на виході блока синхронізації 16 з'являється імпульс синхронізації і через рівні проміжки часу Т синхр. = 0,5 Тск - наступні імпульси синхронізації, які включають через часовий селектор 20 форсуючі індуктори виконавчого механізму 12. При цьому перший формувач імпульсів 14 при спрацюванні часового селектора 20 виробляє імпульс, тривалість якого дорівнює часу реверса системи, і підключає на цей час форсуючі індуктори виконавчого механізму 12 через комутатор 13 до трифазної мережі. В залежності від полярності на комутатор 13 імпульсу, форсуючі індуктори виконавчого механізму 12 живляться трифазною напругою з прямим або зворотним чергуванням фаз, що створює ковзне магнітне поле одного або іншого напрямку і відбувається реверс антени в необхідному напрямку. Так як включення форсуючих індукторів виконавчого механізму 12 відбувається в чітко визначені моменти часу, які визначаються моментом співпадання на входах часового селектора 20 імпульсів з дільника частоти 18 та другого формувача імпульсів 17, то задані генератором тактових імпульсів РЛС періоди сканування антени строго стабілізовані. Для швидкого поворотного автоматичного введення системи управління рухом антени РЛС в синхронізм при випадкових збоях синхронізації (в процесі роботи збої синхронізації бувають часто), необхідно вивести блок синхронізації 16 із режиму самоблокування та обнулити дільник частоти 18, тим самим підготовивши їх до наступного циклу синхронізації. Для виконання цієї задачі служить генератор пилкоподібної напруги 21 та третій формувач імпульсів 22. При цьому імпульси з виходу часового селектора 20 надходять на вхід генератора пилкоподібної напруги 21 та обривають пилу. При закінченні імпульсу з часового селектора 20 генератор пилкоподібної напруги 21 знову починає формувати пилкоподібну напругу, причому по такому закону, щоб до появи з часового селектора 20 наступного імпульсу миттєве значення напруги не досягало заданого значення опорної напруги UОН, величина якого визначається величиною сектора сканування та швидкістю руху антени в робочому секторі. При збої синхронізації імпульси з дільника частоти 18 та другого формувача імпульсів 17 не співпадають в часі на обох входах часового селектора 20 і, як наслідок, відсутні на його виході. При цьому миттєве значення напруги пилки продовжує зростати і в момент часу tобн. 0,5 Тск досягає значення опорної напруги. При рівності миттєвого значення пилки та заданої опорної напруги третій формувач імпульсів 22 дає імпульс, який подається на блок синхронізації 16. Тривалість імпульсу визначається часом, необхідним для виходу блока синхронізації 16 з режиму самоблокування і для обнуління дільника частоти 18. При приході імпульсу з третього формувача імпульсів 22 блок синхронізації 16 виходить з режиму самоблокування та обнуляє дільник частоти 18, готуючи тим самим систему до наступного циклу синхронізації. Оскільки моменти виводу блока синхронізації 16 з режиму самоблокування та обнуління дільника частоти 18 визначаються моментом рівності миттєвого значення напруги пилки з генератора пилкоподібної напруги 21 і порогової напруги, то час повторного входження системи управління рухом антени РЛС в синхронізм при випадкових збоях синхронізації буде меншим, ніж Тск / 2. Застосування нечіткого регулятора дозволяє автоматично регулювати параметри підсилення КП, КІ та КД ПІД регулятора 10. При зміні передавальної функції об'єкта управління (ОУ) та задавальних і збурювальних дій зберігається потрібна точність. При цьому реакція адаптивного нечіткого ПІД регулятора 10 значно краща, ніж класичного. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 55 60 Адаптивна система управління швидкістю обертання радіолокаційної антени, що містить задатчик кута повороту антени, підключений до входу, механічно пов'язаного з виконавчим механізмом датчика кута повороту антени, вихід якого через фазовий детектор підключений до першого входу порогового блока, другий вхід якого з'єднаний з виходом задатчика величини сектора огляду, а вихід з'єднаний з першим входом суматора, другий вхід якого підключений до 3 UA 103634 U 5 10 15 виходу датчика швидкості обертання антени, блок формування команд управління, вихід якого підключений до першого входу виконавчого механізму, другий вхід якого через комутатор з'єднаний з виходом першого формувача імпульсів, а вихід механічно з'єднаний з другим входом датчика кута повороту антени та з першим входом датчика швидкості обертання антени, другий вхід якого підключений до виходу задатчика швидкості сканування, блок синхронізації, перший вхід якого так само, як і вхід другого формувача імпульсів, підключений до виходу порогового блока, а вихід блока синхронізації підключений до першого входу дільника частоти, до другого входу якого підключений генератор тактових імпульсів РЛС, вихід дільника частоти з'єднаний з першим входом часового селектора, другий вхід якого з'єднаний з виходом другого формувача імпульсів, а вихід з'єднаний з входом першого формувача імпульсів, а також послідовно з'єднані генератор пилкоподібної напруги і третій формувач імпульсів, вихід якого з'єднаний з другим входом блока синхронізації, а вхід генератора пилкоподібної напруги підключений до виходу часового селектора, яка відрізняється тим, що в неї введений ПІДрегулятор, перший вхід якого з'єднаний з виходом суматора, а вихід - з блоком формування команд управління, ПІД-регулятор другим входом з'єднаний з фазі-блоком, котрий, в свою чергу, першим входом з’єднаний з виходом суматора, другим входом - з виходом блока диференціювання, вхід якого з'єднаний з виходом суматора. Комп’ютерна верстка А. Крулевський Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 4
ДивитисяДодаткова інформація
МПК / Мітки
МПК: G01S 13/02, H01Q 3/00
Мітки: антени, система, радіолокаційної, управління, швидкістю, адаптивна, обертання
Код посилання
<a href="https://ua.patents.su/6-103634-adaptivna-sistema-upravlinnya-shvidkistyu-obertannya-radiolokacijjno-anteni.html" target="_blank" rel="follow" title="База патентів України">Адаптивна система управління швидкістю обертання радіолокаційної антени</a>
Адаптивна система управління швидкістю обертання турбіни
Номер патенту: 78888
Опубліковано: 10.04.2013
Автори: Симонов Володимир Федорович, Гусєва Альона Олегівна
МПК: F03B 15/00
Мітки: управління, система, обертання, адаптивна, швидкістю, турбіни
Формула / Реферат:
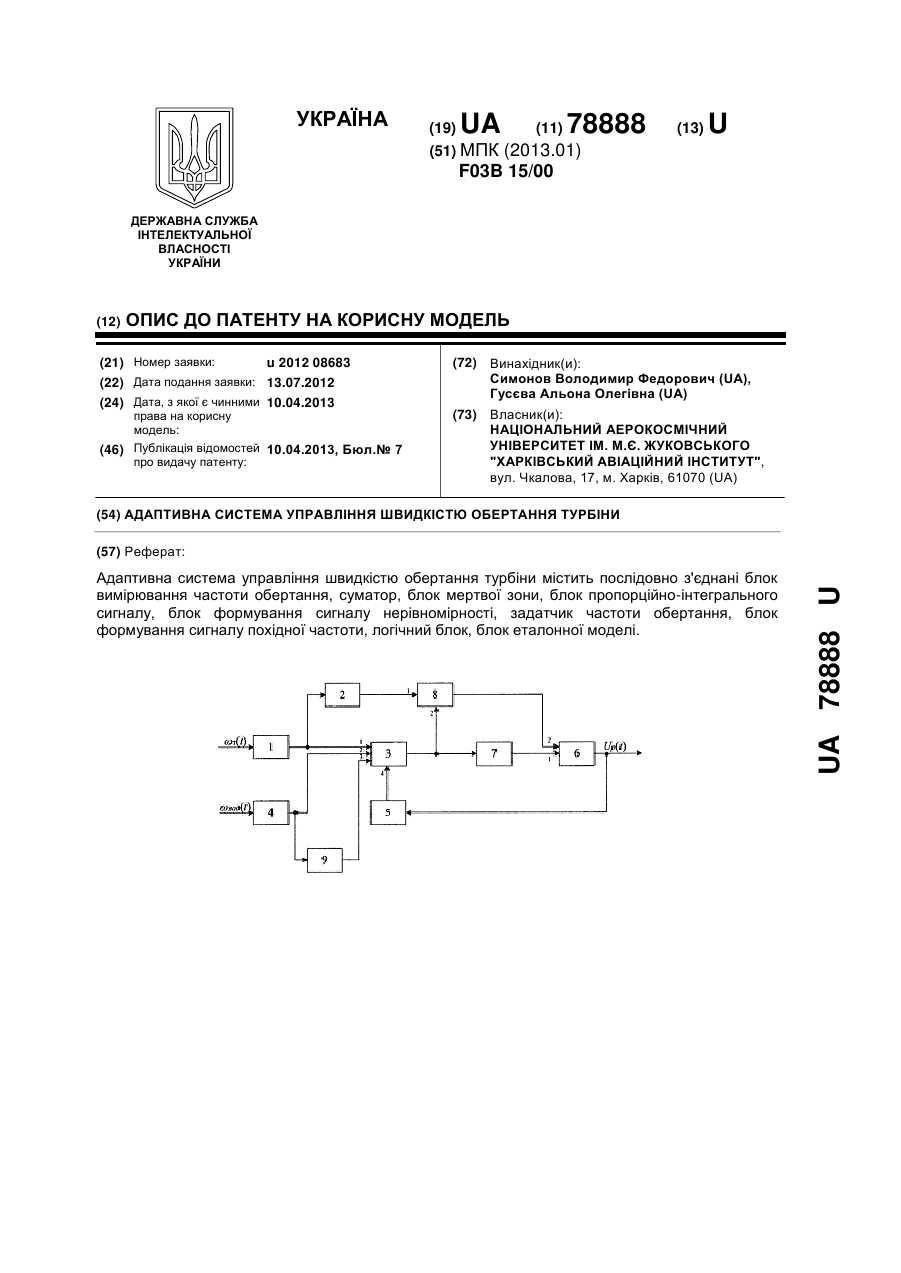
Адаптивна система управління швидкістю обертання турбіни, що містить послідовно з'єднані блок вимірювання частоти обертання, суматор, блок мертвої зони, блок пропорційно-інтегрального сигналу, блок формування сигналу нерівномірності, вихід якого з'єднаний з четвертим входом суматора, а також задатчик частоти обертання, вихід якого з'єднаний з другим входом суматора, блок формування сигналу похідної частоти, вхід якого з'єднаний з виходом...
Адаптивна нелінійна система управління
Номер патенту: 44723
Опубліковано: 12.10.2009
Автори: Дибська Ирина Юріївна, Шпак Ганна Сергіївна, Бандура Іван Миколайович
МПК: G05B 13/00
Мітки: нелінійна, система, адаптивна, управління
Формула / Реферат:
Адаптивна нелінійна система управління, що містить перший помножувач, вихід якого з'єднаний через паралельно включені диференціатор, інтегратор і підсилювач з входами першого суматора, а вихід якого підключений до першого входу другого помножувача, вихідний сигнал з цього помножувача сполучений з першим входом другого суматора, вихід якого з'єднаний через регулятор з входом об'єкта управління, вихід якого підключений до першого входу першого...
Відмовостійка система керування швидкістю обертання турбіни

Номер патенту: 76051
Опубліковано: 25.12.2012
Автори: Гармаш Денис Вікторович, Симонов Володимир Федорович
МПК: F03B 15/00
Мітки: швидкістю, обертання, турбіни, відмовостійка, керування, система
Формула / Реферат:
Відмовостійка система керування швидкістю обертання турбіни, що містить послідовно з'єднані блок вимірювання частоти обертання, суматор, блок мертвої зони, блок пропорційно-інтегрального сигналу, перший блок формування сигналу нерівномірності та задатчик частоти обертання, вихід якого з'єднаний з другим входом суматора, блок формування сигналу похідної частоти, вхід якого з'єднаний з виходом блока вимірювання частоти обертання, а вихід...
Адаптивна система управління
Номер патенту: 11808
Опубліковано: 16.01.2006
Автори: Бандура Іван Миколайович, Симонов Володимир Федорович, Шемшур Микола Володимирович, Рудико Оксана Вікторівна
МПК: G05B 13/00
Мітки: система, управління, адаптивна
Формула / Реферат:
1. Адаптивна система управління, що містить перший блок інтеграторів, перший блок підсилювачів, об'єкт управління, другий блок інтеграторів, яка відрізняється тим, що в систему введено обчислювач, з'єднаний з виходом пристрою узгодження через блок аналого-цифрових перетворювачів та з входом другого блока інтеграторів через блок цифро-аналогових перетворювачів.2. Адаптивна система управління за п. 1, яка відрізняється тим, що пристрій...
Система стабілізації мобільної радіолокаційної системи виявлення
Номер патенту: 78883
Опубліковано: 10.04.2013
Автори: Смирнова Людмила Іванівна, Столярова Світлана сергіївна
МПК: G05D 1/00
Мітки: радіолокаційної, виявлення, системі, система, мобільної, стабілізації
Формула / Реферат:
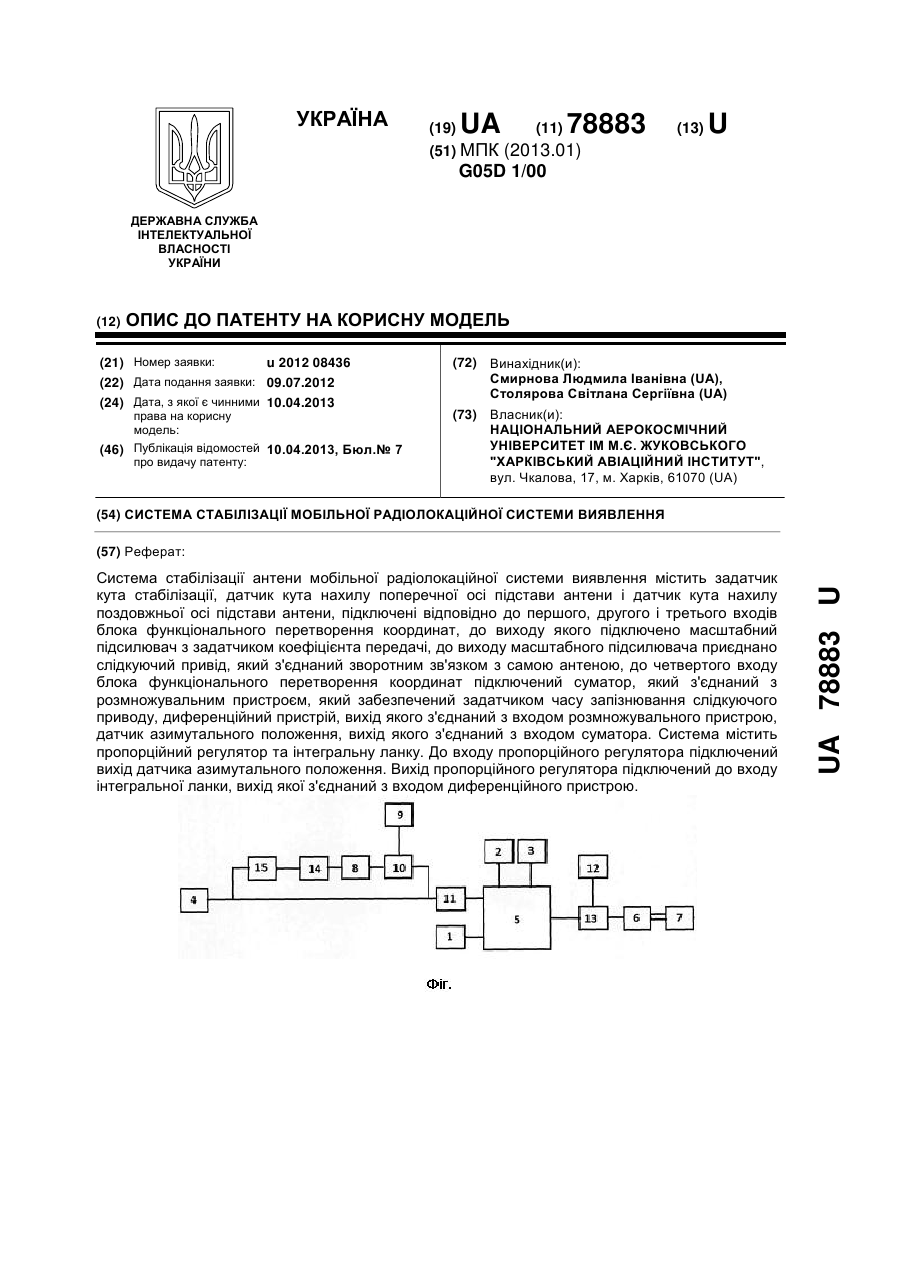
Система стабілізації антени мобільної радіолокаційної системи виявлення, що містить задатчик кута стабілізації, датчик кута нахилу поперечної осі підстави антени і датчик кута нахилу поздовжньої осі підстави антени, підключені відповідно до першого, другого і третього входів блока функціонального перетворення координат, до виходу якого підключено масштабний підсилювач з задатчиком коефіцієнта передачі, до виходу масштабного підсилювача...
Попередній патент: Система автоматичного управління висотою польоту безпілотного літального апарата
Наступний патент: Формувач періодичної послідовності триімпульсних кодових серій з програмованою тривалістю паузи між імпульсами у серії
Випадковий патент: Багет для монтажу натяжної стелі