Кантувач довгомірних вантажів
Номер патенту: 10673
Опубліковано: 25.12.1996
Автори: Малінський Леонід Наумович, Загоровський Володимир Сергійович, Опімах Євген Миколайович
Формула / Реферат
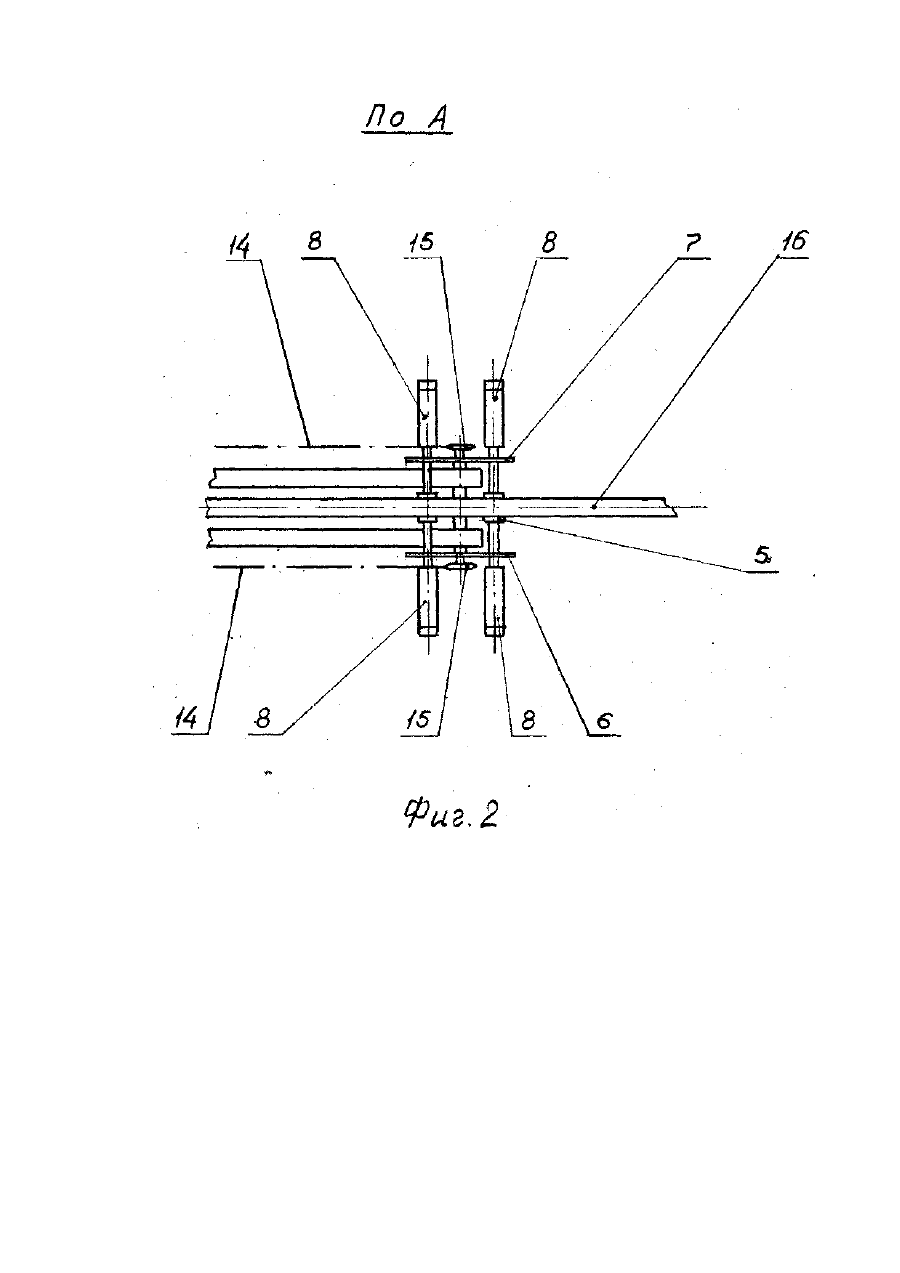
Кантователь длинномерных грузов, содержащих основание, привод, исполнительный орган и грузозахватное устройство, причем в исполнительном органе звенья кинематически связаны между собой и с основанием при помощи цепной передачи, так что ведущее звено связано с приводом, а ведомое с грузозахватным устройством, при этом ведущее звено кинематической связи исполнительного органа жестко закреплено на основании и выполнено в виде неподвижно установленной на основании звездочки, а ведомое звено выполнено в виде подвижной звездочки, отличающийся тем, что привод выполнен в виде гпдроцилиндра, шток которого соединен с исполнительным органом, выполненным в виде стрелы с возможностью фиксированного ее поворота из горизонтального в вертикальное положение вокруг оси шарнира, закрепленного на одном конце стрелы, при этом ось шарнира совпадает с осью неподвижно установленной на основании звездочки, а на другом конце стрелы установлено на шарнире грузозахватное устройство с возможностью поворота вокруг оси шарнира, ось которого совпадает с осью подвижной звездочки, установленной там же на другом конце стрелы, передаточное отношение между указанными звездочками выполнено повышающим 2:1, при этом замкнутая кинематическая связь между звездочками выполнен в виде двух участков цепи с длиной цепной передачи не менее длины окружности звездочки, охватываемой цепью, причем концы участков цепи соединены между собой двумя тягами, а грузозахватное устройство выполнено в виде схвата, состоящего из двух половин, расположенных в направлении продольной оси стрелы и управляемых от силовых гидроцилиндров причем продольная ось грузозахватного устройства установлена параллельно продольной оси стрелы в ее исходном положении, а оси силовых гидроцилиндров, управляющих половинами схвата, установлены параллельно друг другу и перпендикулярно продольной оси стрелы.
Текст
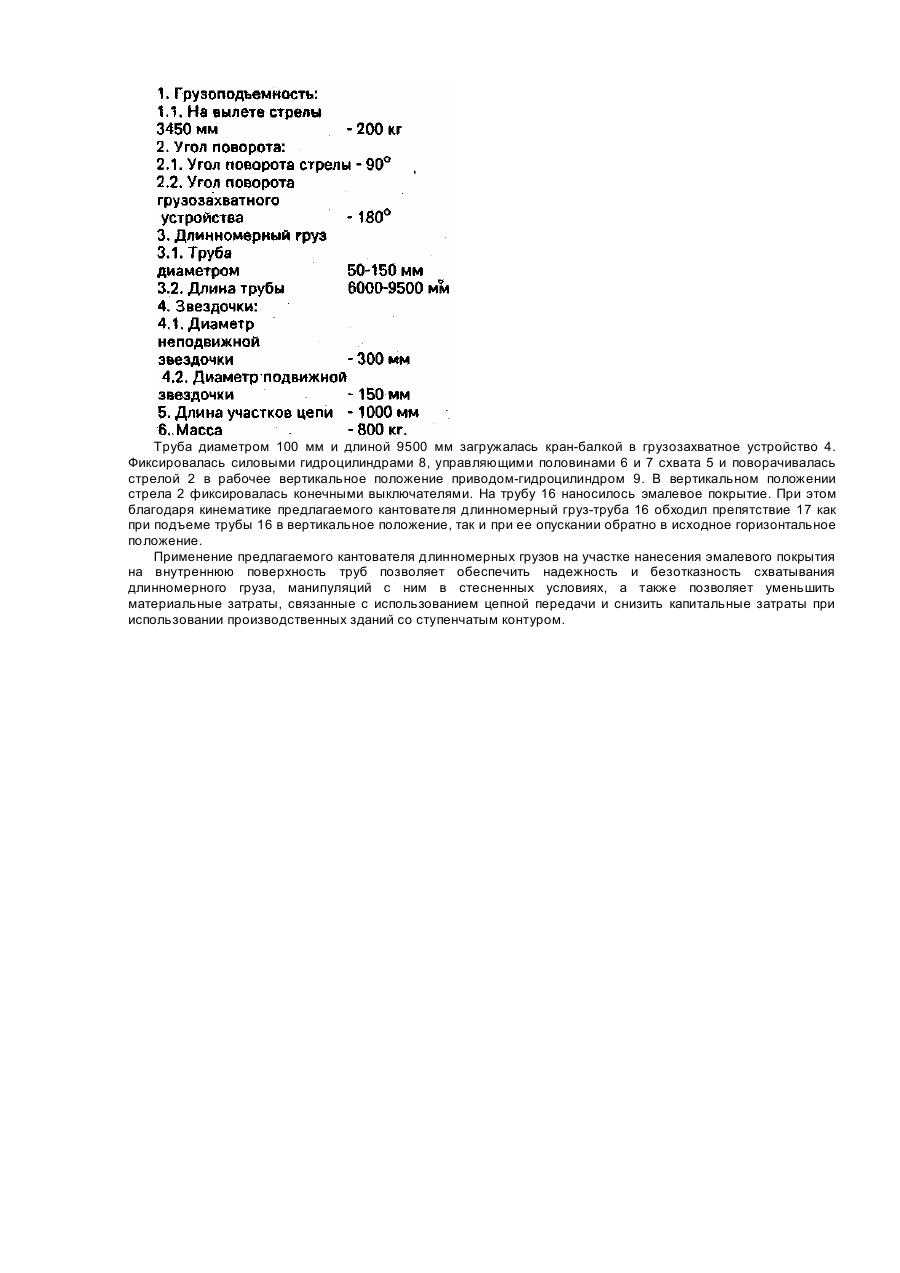
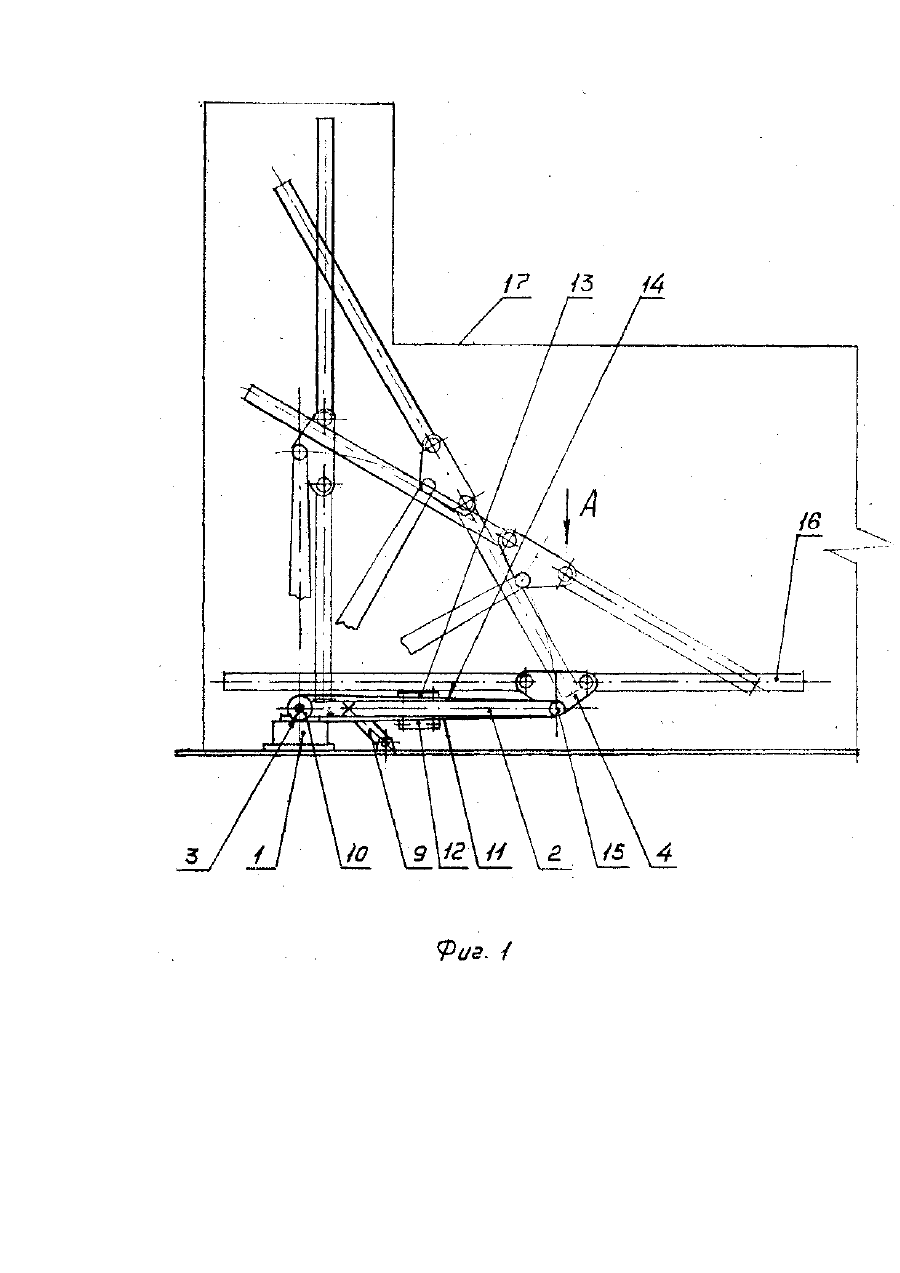
Изобретение относится к области погрузочно-разгрузочных работ для механизации технологических процессов содержащих подъемно-транспортные операции, в частности для поворота длинномерных грузов, например труб при эмалировании их внутренней поверхности, в пределах зоны обслуживания по заранее заданной траектории с необходимой точностью. Наиболее близким из известных устройств к предлагаемому кантователю длинномерных грузов по технической сущности и достигаемому результату, который принят за прототип, является манипулятор, предназначенный для механизации технологических процессов, содержащих подъемно-транспортные операции [1]. Манипулятор содержит основание, привод, исполнительный орган и грузозахватное устройство. Привод выполнен электромеханическим. В исполнительном органе содержится несколько шарнирно сочлененных звеньев, которые при помощи привода могут поворачиваться друг относительно друга и тем самым изменять расстояние по горизонтали между захватом и опорой. Таким образом, исполнительный орган представляет собой многозвенный (четыре звена) шарнирный механизм, все звенья которого шарнирно сочленены и кинематически связаны между собой и с основанием, при этом первое звено связано с приводом, а последнее - с захватом. В указанном манипуляторе каждое последующее звено смонтировано на предыдущем с возможностью полного относительного поворота в шарнире сочленения. Входное звено цепи кинематической связи известного устройства жестко закреплено на основании, а выходное звено на захвате. Каждый участок цепи кинематической связи между смежными звеньями выполнен с передаточным отношением равным 1:2, кроме последнего, передаточное отношение которого равно единице. Каждое звено исполнительного органа имеет свой корпус, в котором размещена цепная ускоряющая передача с передаточным отношением 1:2, включающая цепь, звездочку с большим числом зубьев и звездочку с двое меньшим числом зубьев. Звездочки установлены на подшипниках. Известное грузоподъемное устройство требует необходимости строгого согласования взаимных положений звеньев исполнительного органа и обеспечивает при этом прямолинейную траекторию перемещения грузозахватного устройства и только в горизонтальной плоскости. Недостатком указанного манипулятора также является невозможность расширения технологических возможностей устройства путем обеспечения переворачивания длинномерных грузов в вертикальной плоскости, особенно в стесненных условиях в вертикальной плоскости, когда контур производственного здания имеет ступенчатый характер либо несущие конструкции здания фермы расположены в рабочей зоне грузоподъемного устройства. При этом длинномерный груз по своей длине превышает высоту нижнего уровня препятствия. Техническая задача, которую решает предлагаемый кантователь длинномерных грузов, состоит в обеспечении движения длинномерных грузов в стесненных условиях в пределах зоны обслуживания, когда груз по своей длине превышает высоту производственного здания или технологического проема, а обеспечивается решение технической задачи путем нового выполнения исполнительного органа кантователя. Техническим результатом решения поставленной задачи при осуществлении предлагаемого изобретения является переориентировка длинномерного груза в вертикальной плоскости при его перемещении из горизонтального положения в вертикальное и обратно. Технический результат достигают тем, что в кантователе длинномерных грузов, содержащем основание, привод, исполнительный орган и грузозахватное устройство, в исполнительном органе которого звенья кинематически связаны между собой и с основанием при помощи цепной передачи таким образом, что ведущее звено связано с приводом, а ведомое - с грузозахватным устройством, а ведущее звено кинематической связи исполнительного органа жестко закреплено на основании и выполнено в виде неподвижно установленной на основании звездочки, а ведомое звено выполнено в виде подвижной звездочки, в соответствии с изобретением привод выполнен в виде гидроцилиндра, шток которого соединен с исполнительным органом. Исполнительный орган выполнен в виде стрелы с возможностью фиксированного ее поворота из горизонтального в вертикальное положение вокруг оси шарнира, закрепленного на одном конце стрелы. Ось шарнира совпадает с осью неподвижно установленной на основании звездочки. На другом конце стрелы установлено на шарнире грузозахватное устройство с возможностью поворота вокруг оси шарнира, ось которого совпадает с осью' подвижной звездочки установленной там же на другом конце стрелы. Передаточное отношение между указанными звездочками выполнено повышающим 2:1, при этом замкнутая кинематическая связь между звездочками выполнена в виде двух участков цепи с длиной цепной передачи не менее длины окружности звездочки охватываемой цепью, причем концы участков цепи соединены между собой двумя тягами. Грузозахватное устройство выполнено в виде схвата состоящего из двух половин расположенных в направлении продольной оси стрелы и управляемых от силовых гидроцилиндров, причем продольная ось грузозахватного устройства установлена параллельно продольной оси стрелы в ее исходном положении, а оси силовых гидроцилиндров, управляющих половинами схвата, установлены параллельно друг другу и перпендикулярно продольной оси стрелы. Предлагаемое новое выполнение исполнительного органа кантователя позволяет осуществить движение длинномерного груза с наложением на него двух вращательных движений с разными угловыми скоростями отличающимися в 2 раза, что способствует тому, что траектория концов длинномерного груза имеет вид криволинейной дугообразной траектории, позволяющей перемещать длинномерный груз из горизонтального положения в вертикальное и обратно в вертикальной плоскости и обходить при этом препятствия, расположенные в пределах зоны обслуживания, в виде несущей фермы или ступенчатого характера производственного здания. Предлагаемое изобретение поясняется чертежами. На фиг. 1 схематически изображена конструктивная схема кантователя длинномерных грузов и перемещения длинномерных грузов, общий вид. На фиг. 2 схематически изображено грузозахватное устройство кантователя длинномерных грузов, вид по стрелке А на фиг. 1. Предлагаемый кантователь длинномерных грузов содержит (фиг. 1, фиг. 2): основание 1, исполнительный орган 2, шарнир 3, грузозахватное устройство 4, схват 5, состоящий из двух половин 6 и 7, силовые гидроцилиндры 8, привод 9, звездочку 10, участок втулочнороликовой цепи 11, тягу 12 и тягу 13, участок втулочнороликовой цепи 14, звездочку 15, длинномерный груз 16. Основание 1 выполнено в виде рамной конструкции прямоугольного сечения. Привод кантователя выполнен в виде гидроцилиндра 9, шток которого соединен с исполнительным органом. Исполнительный орган выполнен в виде стрелы 12 с возможностью ее фиксированного (за, счет конечных выключателей, которые на чертеже не показаны) поворота из исходного горизонтального положения в рабочее вертикальное положение. Для этого на основании 1 установлен шарнир 3, ось которого закреплена на одном конце исполнительного органа-стрелы 2. Ось шарнира 3 установлена таким образом, что она совпадает с осью жестко и неподвижно установленной на основании 1 звездочки 10. Недругом конце исполнительного органастрелы 2 установлено на шарнире грузозахватное устройство 4. Грузозахватное устройство 4 обладает возможностью поворота вокруг указанного шарнира благодаря тому, что его ось совпадает с осью там же укрепленной на исполнительном органе-стреле 2 подвижной звездочки 15. Обе указанные звездочки 10 и 15 установлены на подшипниках (на чертеже не показаны). Грузозахватное устройство 4 выполнено в виде схвата 5 (фиг. 2), состоящего из двух половин 6 и 7, расположенных своей большой стороной в направлении продольной оси исполнительного органа-стрелы 2 и управляемых от силовых гидроцилиндров 8. Оси силовых гидроцилиндров 8 расположены параллельно друг другу попарно с каждой половиной схвата 5 и перпендикулярно направлению продольной оси исполнительного органа-стрелы 2 и длинномерного груза 16, а продольная ось грузозахватного устройства 4 установлена параллельно продольной оси исполнительного органа-стрелы 2 в ее исходном горизонтальном положении. Передаточное отношение между звездочками 10 и 15 выполнено повышающим 2:1, а замкнутая кинематическая связь между указанными звёздочками выполнена в виде двух участков втулочнороликовой цепи 11 и 14. Участок цепи 11 охватывает звездочку 10, а участок цепи 14 охватывает звездочку 15. При этом длина указанных участков цепи 11 и 14 выполнена не менее длины окружности звездочки охватываемой цепью. Концы участков цепи 11 и 14 соединены между собой двумя тягами 12 и 13 и, таким образом, замыкают кинематическую связь между звездочками. Возможно конструктивное исполнение указанной кинематической связи между звездочками 10 и 15 в виде двух ветвей, расположенных с двух противоположных сторон исполнительного органа-стрелы 2. Такое исполнение способствует повышению грузоподъемности кантователя. Предлагаемый кантователь длинномерных грузов работает следующим образом. В исходном положении половины 6 и 7 схвата 5 грузозахватного устройства 4 (фиг. 2) разведены. Шток привода-гидроцилиндра 9 опущен (находится в крайнем нижнем положении). Продольная ось исполнительного органа-стрелы 2 занимает горизонтальное положение. Продольная ось грузозахватного устройства 4 параллельна ей и также занимает горизонтальное положение. Штоки силовых гидроцилиндров 8 управляющих половинами 6 и 7 схвата 5 находятся в отжатом (крайнем от половин 6 и 7 положении). Включением привода-гидроцилиндра 9 поворачивают исполнительный орган-стрелу 2 из горизонтального положения в вертикальное, которое фиксируется с помощью конечных выключателей (на чертеже не показано). При этом происходит поворот грузозахватного устройства 4 вокруг оси подвижной звездочки 15 на 180° благодаря тому, что угловая скорость поворота грузозахватного устройства 4 в 2 раза превышает угловую скорость поворота стрелы 2 в шарнире 3 относительно основания 1 и неподвижной звездочки 10. Это обусловлено повышающим передаточным отношением между указанными звёздочками 10 и 15 равным 2;1. Подвижная звездочка 15 поворачивается при этом за счет проворачивания гибких втулочнороликовых участков цепи 11 и 14, соединенных тягами 12 и 13. Участок цепи 11 проворачивается вокруг неподвижной звездочки 10. Участок цепи 14 проворачивается вокруг неподвижной звездочки 15. Такое конструктивное исполнение кинематической связи между звездочками 10 и 15, при котором минимальная длина участков цепи выполнена не менее длины окружности звездочки охватываемой цепью, позволяет уменьшить материальные расходы на применение втулочнороликовой цепи в грузозахватном устройстве 4. Указанная длина участков цепи является граничной, менее которой грузозахватное устройство функционировать не может, так как тяги 12 и 13 будут взаимодействовать с зубьями звездочек, что ведет к разрушению грузозахватного устройства. Длинномерный груз-труба 16 становится в рабочее вертикальное положение. При этом благодаря наложению на движение длинномерного груза-трубы 16 двух указанных вращательный движений с разными угловыми скоростями траектория концов длинномерного груза-трубы 16 имеет вид криволинейной дугообразной траектории (фиг. 1), позволяющей перемещать длинномерный груз-трубу 16 в вертикальное положение и обходить при этом препятствие 17, когда контур производственного здания имеет ступенчатый характер, либо в рабочей зоне подъема длинномерного груза-трубы 16 расположена несущая ферма, также препятствующая повороту груза. При этом длинномерный груз по своей длине превышает высоту нижнего уровня производственного здания, либо другого препятствия. Цикл подъема длинномерного груза-трубы 16 закончен. После нанесения эмалевого покрытия на внутреннюю поверхность трубы 16 ее выгружают из кантователя в обратном ее подъему порядке, затем кран-балкой либо другим грузоподъемным средством (на чертеже не показано) транспортируют трубу 16 на стеллаж-сушку. Пример. Кантователь длинномерных грузов испытывали в производственных условиях цеха эмалирования труб ПО "Киевжилтеплокоммунэнерго" на участке нанесения эмалевого покрытия на внутреннюю поверхность труб. Стесненность в вертикальной плоскости составляла 2000 мм и определялась как разность между верхним и нижним уровнями производственного здания, которые ограничивают поворот длинномерного груза-трубы. Использовали кантователь длинномерных грузов с технологической характеристикой: Труба диаметром 100 мм и длиной 9500 мм загружалась кран-балкой в грузозахватное устройство 4. Фиксировалась силовыми гидроцилиндрами 8, управляющими половинами 6 и 7 схвата 5 и поворачивалась стрелой 2 в рабочее вертикальное положение приводом-гидроцилиндром 9. В вертикальном положении стрела 2 фиксировалась конечными выключателями. На трубу 16 наносилось эмалевое покрытие. При этом благодаря кинематике предлагаемого кантователя длинномерный груз-труба 16 обходил препятствие 17 как при подъеме трубы 16 в вертикальное положение, так и при ее опускании обратно в исходное горизонтальное положение. Применение предлагаемого кантователя длинномерных грузов на участке нанесения эмалевого покрытия на внутреннюю поверхность труб позволяет обеспечить надежность и безотказность схватывания длинномерного груза, манипуляций с ним в стесненных условиях, а также позволяет уменьшить материальные затраты, связанные с использованием цепной передачи и снизить капитальные затраты при использовании производственных зданий со ступенчатым контуром.
ДивитисяДодаткова інформація
Назва патенту англійськоюTilter of lengthy loads
Автори англійськоюZahorovskyi Volodymyr Serhiiovych, Opimakh Yevhen Mykolaiovych
Назва патенту російськоюКантователь длинномерных грузов
Автори російськоюЗагоровский Владимир Сергеевич, Опимах Евгений Николаевич
МПК / Мітки
Мітки: кантувач, вантажів, довгомірних
Код посилання
<a href="https://ua.patents.su/5-10673-kantuvach-dovgomirnikh-vantazhiv.html" target="_blank" rel="follow" title="База патентів України">Кантувач довгомірних вантажів</a>
Кантувач довгомірних вантажів
Номер патенту: 10672
Опубліковано: 25.12.1996
Автори: Опімах Євген Миколайович, Малінський Леонід Наумович, Загоровський Володимир Сергійович
Мітки: довгомірних, кантувач, вантажів
Формула / Реферат:
Кантователь длинномерных грузов, содержащий раму, исполнительное устройство с исполнительным органом, рабочий орган, при этом исполнительное устройство выполнено в виде вертикальной колонны, снабженной механизмами подъема и опускания, а также поворота вокруг вертикальной оси, исполнительный орган выполнен в виде стрелы, на одном конце которой смонтирован рабочий орган в виде грузозахватного устройства, при этом стрела содержит также...
Опора у транспортувальному засобу для підтримання довгомірних вантажів
Номер патенту: 4523
Опубліковано: 28.12.1994
Автор: Лавренов Борис Миколайович
МПК: B60P 7/06, B60P 3/40, B61D 3/16
Мітки: опора, вантажів, підтримання, довгомірних, засобу, транспортувальному
Формула / Реферат:
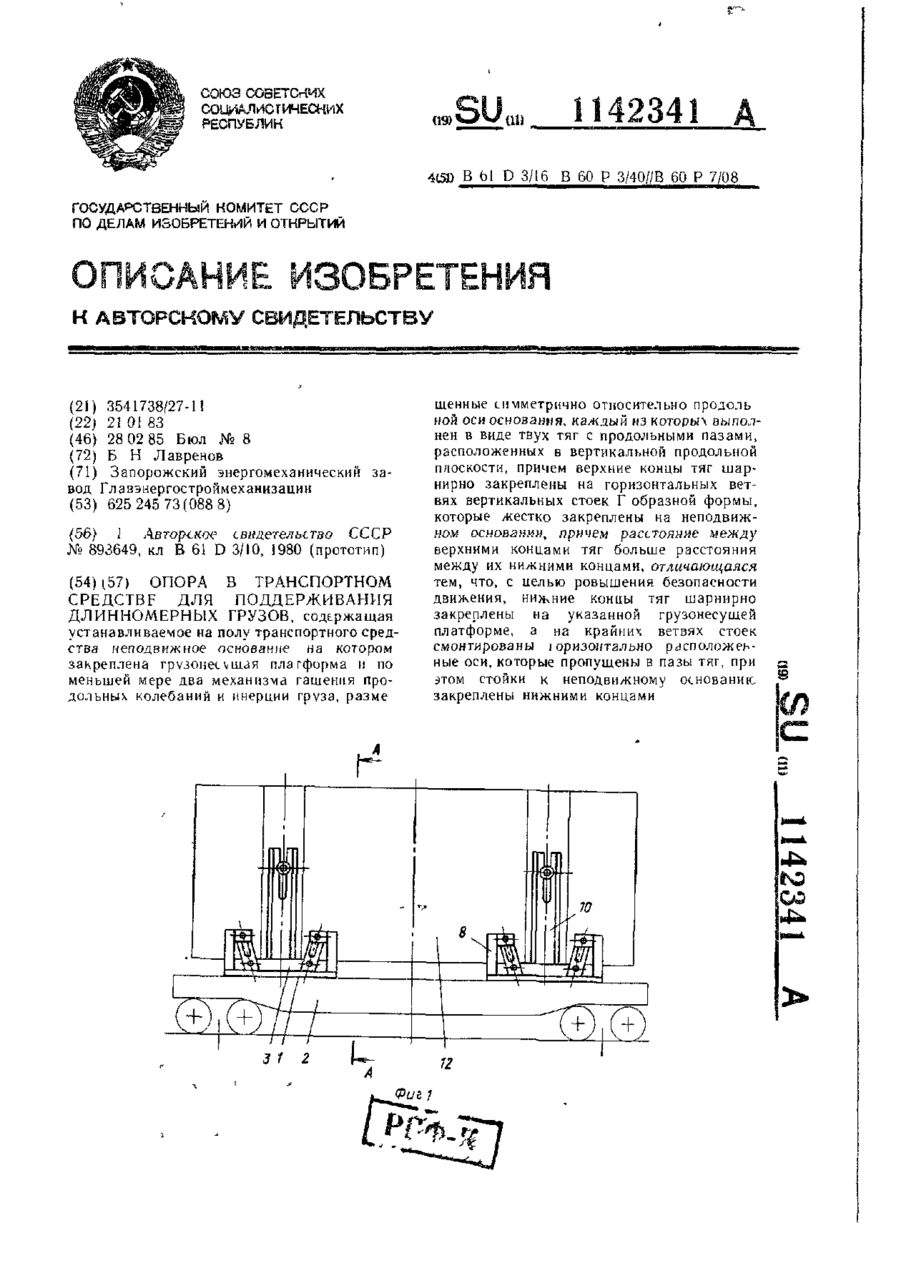
Опора в транспортном средстве для поддерживания длинномерных грузов, содержащая устанавливаемое на полу транспортного средства неподвижное основание, на котором закреплена грузонесущая платформа и по меньшей мере два механизма гашения продольных колебаний и инерции груза, размещенные симметрично относительно продольной оси основания, каждый из которых выполнен в виде двух тяг с продольными пазами, расположенных в вертикальной продольной...
Турнікетна опора транспортного засобу для перевезення довгомірних вантажів
Номер патенту: 4525
Опубліковано: 28.12.1994
Автор: Лавренов Борис Миколайович
МПК: B61D 3/10
Мітки: турнікетна, довгомірних, засобу, опора, вантажів, перевезення, транспортного
Формула / Реферат:
Турникетная опора транспортного средства для перевозки длинномерных грузов, содержащая неподвижное основание, закрепленную на нем гру-зонесущую платформу и, по меньшей мере два механизма гашения продольных колебаний груза, размещенные симметрично на боковых сторонах, отличающаяся тем, что, с целью повышения эффективности, каждый механизм гашения продольных колебаний содержит вертикально расположенную стойку -образной формы, верхний конец...
Пристрій для нагромаджування довгомірних виробів
Номер патенту: 2542
Опубліковано: 26.12.1994
Автори: Ципляков Іван Петрович, Цехмістро Юрій Семенович, Кіт Ольга Іванівна, Швець Володимир Петрович
МПК: B65G 47/02
Мітки: виробів, пристрій, довгомірних, нагромаджування
Формула / Реферат:
1. Устройство для накопления длинномерных изделий, содержащее расположенные на опорной плите, по меньшей мере, два основания с установленными на них с одной стороны стойками, отличающееся тем, что оно снабжено механизмом уплотнения и выравнивания длинномерных изделий, который выполнен в виде приводных плоских секторов, расположенных напротив стоек с другой стороны оснований и шарнирно установленных на последних с возможностью поворота в...
Влаштування для сушіння довгомірних матеріалів
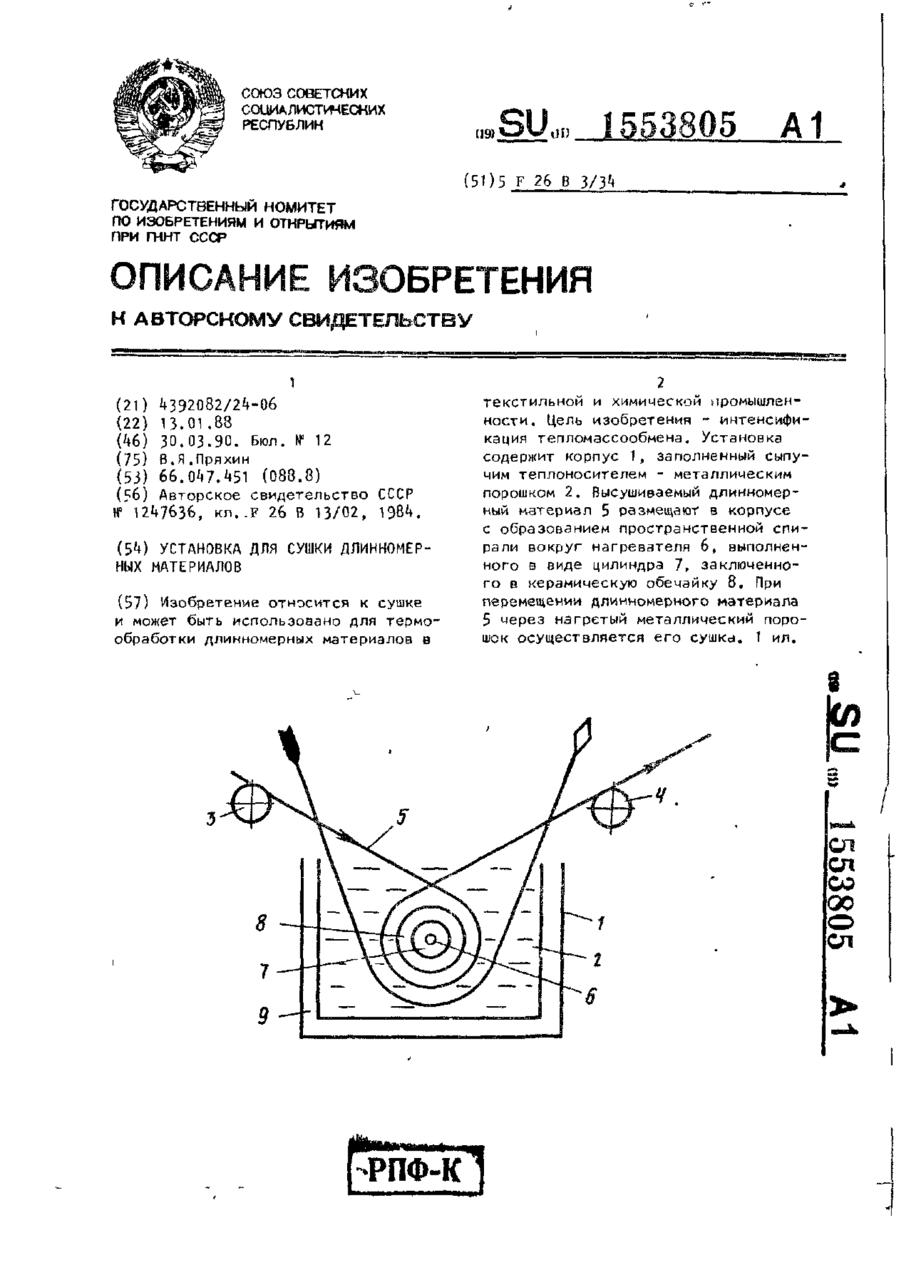
Номер патенту: 8532
Опубліковано: 30.09.1996
Автор: Пряхін Віктор Якович
МПК: F26B 3/32
Мітки: сушіння, влаштування, довгомірних, матеріалів
Формула / Реферат:
Установка для сушки длинномерных материалов, содержащая корпус, заполненный сыпучим теплоносителем, электрический нагреватель в транспортирующие ролики для перемещения материала с образованием последним пространственной петли, отличающаяся тем, что, с целью интенсификации тепломассообмена, электрический нагреватель размещен в центральной части указанной петли и выполнен в виде цилиндра, заключенного в керамическую обечайку, а в качестве...
Попередній патент: Кантувач довгомірних вантажів
Наступний патент: Цифрова система управління наведенням рухомого об’єкта
Випадковий патент: Агоніст аполіпопротеїну а-і (аро а-і), мультимірний аро а-і (варіанти) та їх застосування в лікуванні дисліпідемічних порушень