Електропривод візка мостового крана
Номер патенту: 110990
Опубліковано: 25.10.2016
Автори: Вівдич Владислав Вікторович, Грехов Михайло Андрійович, Петриков Валерій Якович, Гончаренко Сергій Віталійович, Квасоля Павло Анатолійович, Лома Михайло Юрійович
Формула / Реферат
Електропривод візка мостового крана, що містить асинхронний двигун з фазним ротором, кільця якого підключені до блока пускорегулювальних резисторів і блока контролю нульової швидкості, лінійні контактори із силовими контактами в колі статора, електромеханічне гальмо, з'єднуване з мережею через контактор, а також керуючу схему, що з'єднана з кінцевими вимикачами і командоконтролером, який відрізняється тим, що блок контролю нульової швидкості оснащений реле частоти, сигнал на вхід якого подається безпосередньо з кілець ротора, а його виконавчі контакти введені в коло керуючої схеми, яке перемикає лінійні контактори, контактор керування електромеханічним гальмом і секції блока пускорегулювальних резисторів.
Текст
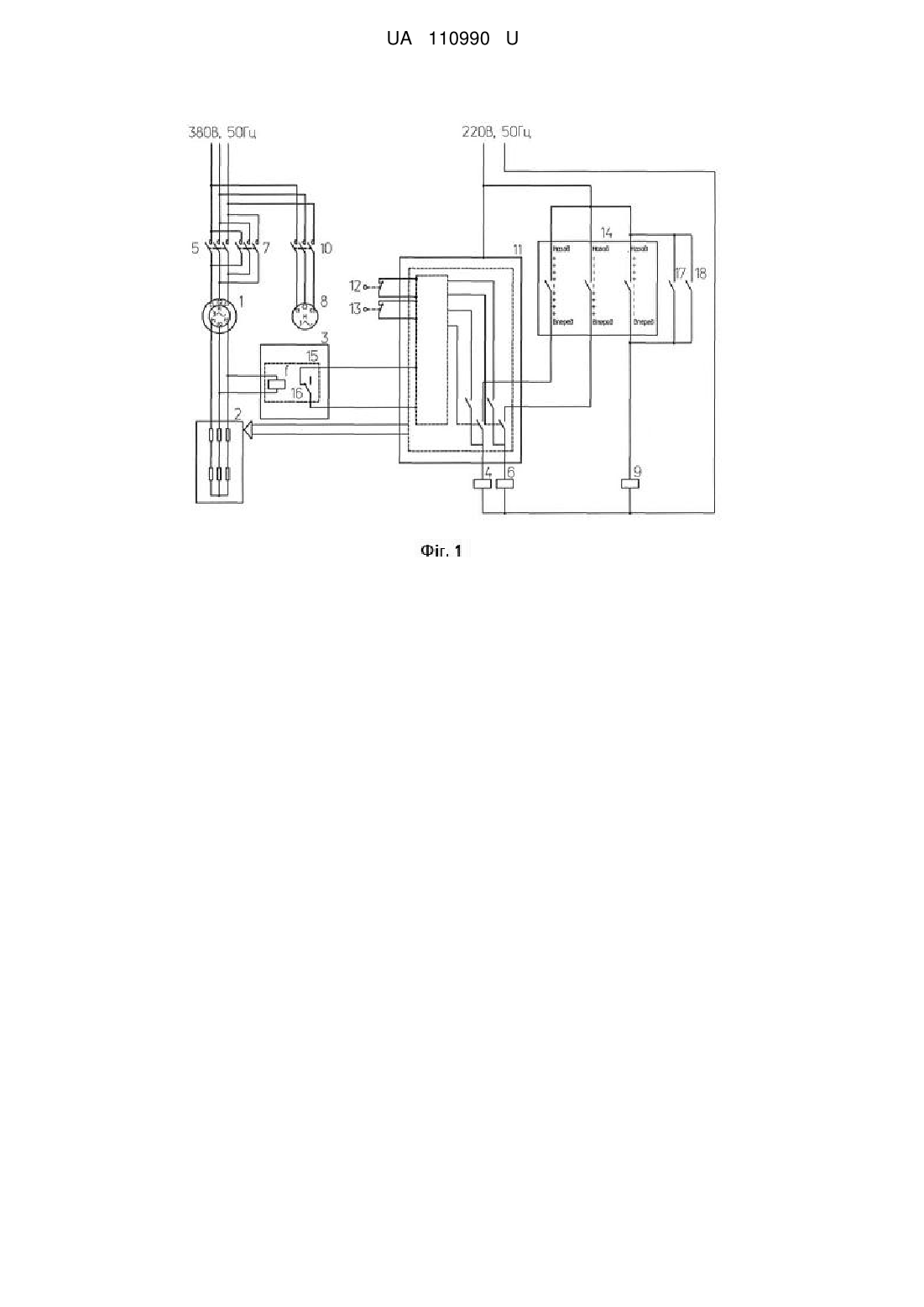
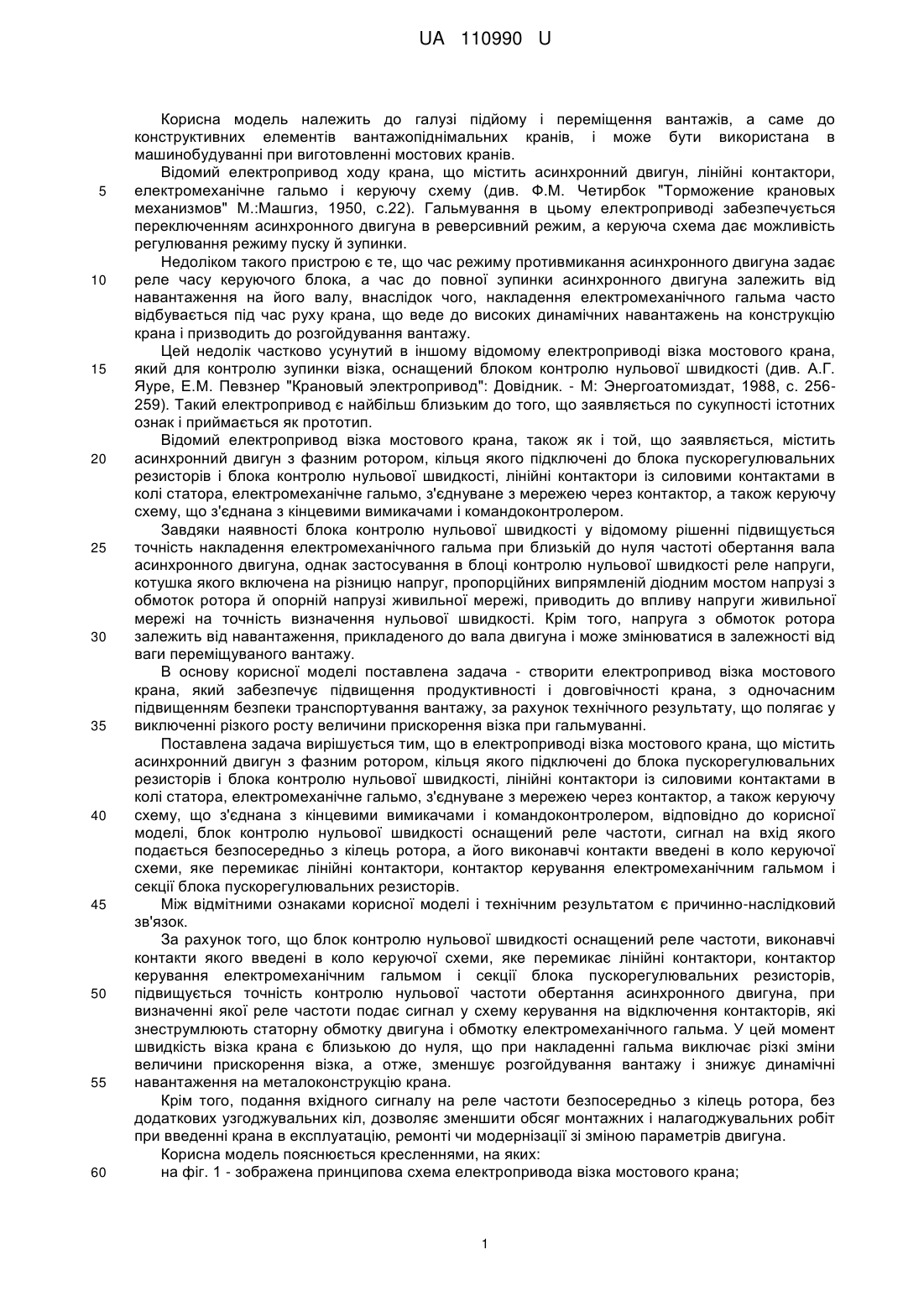
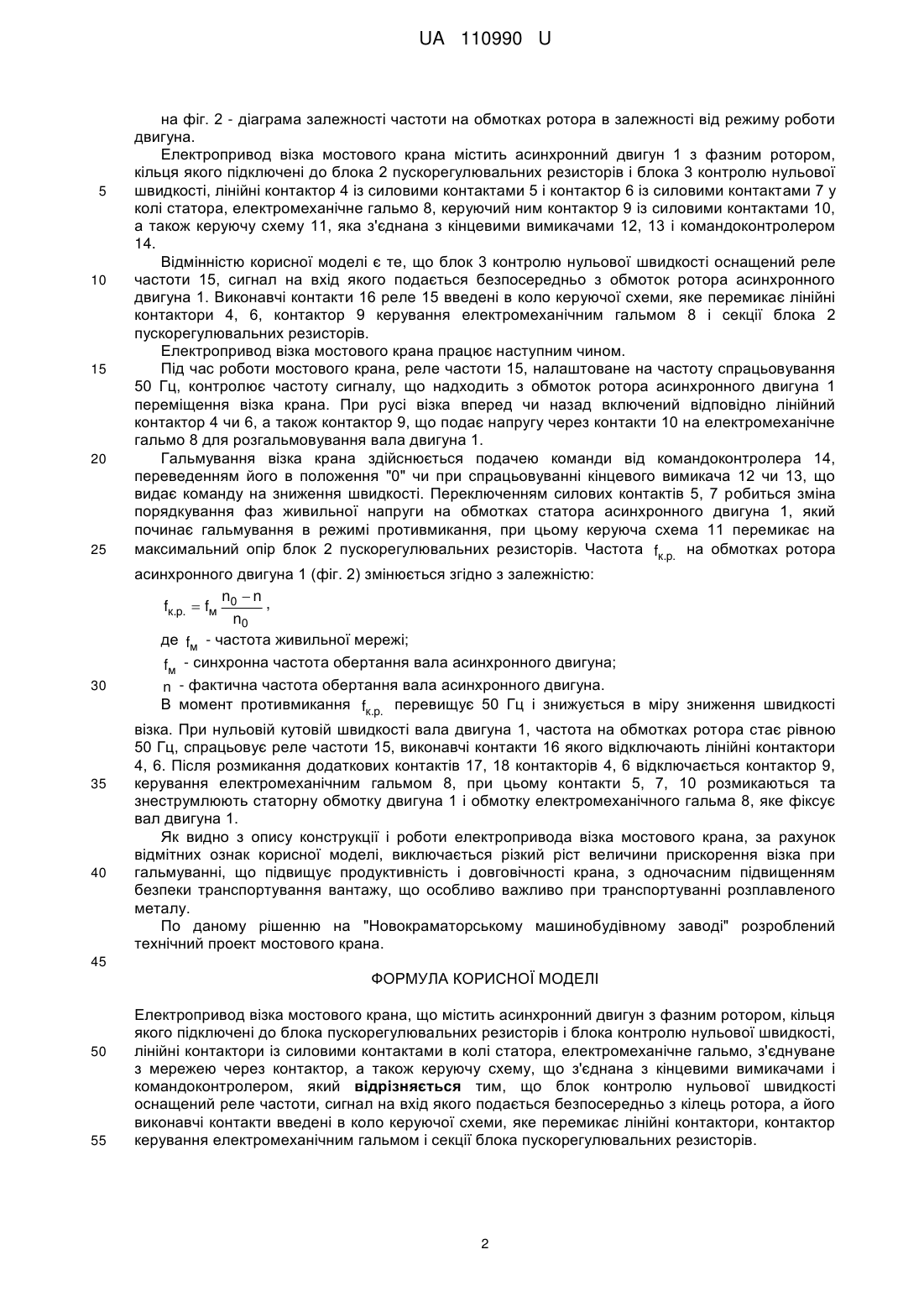
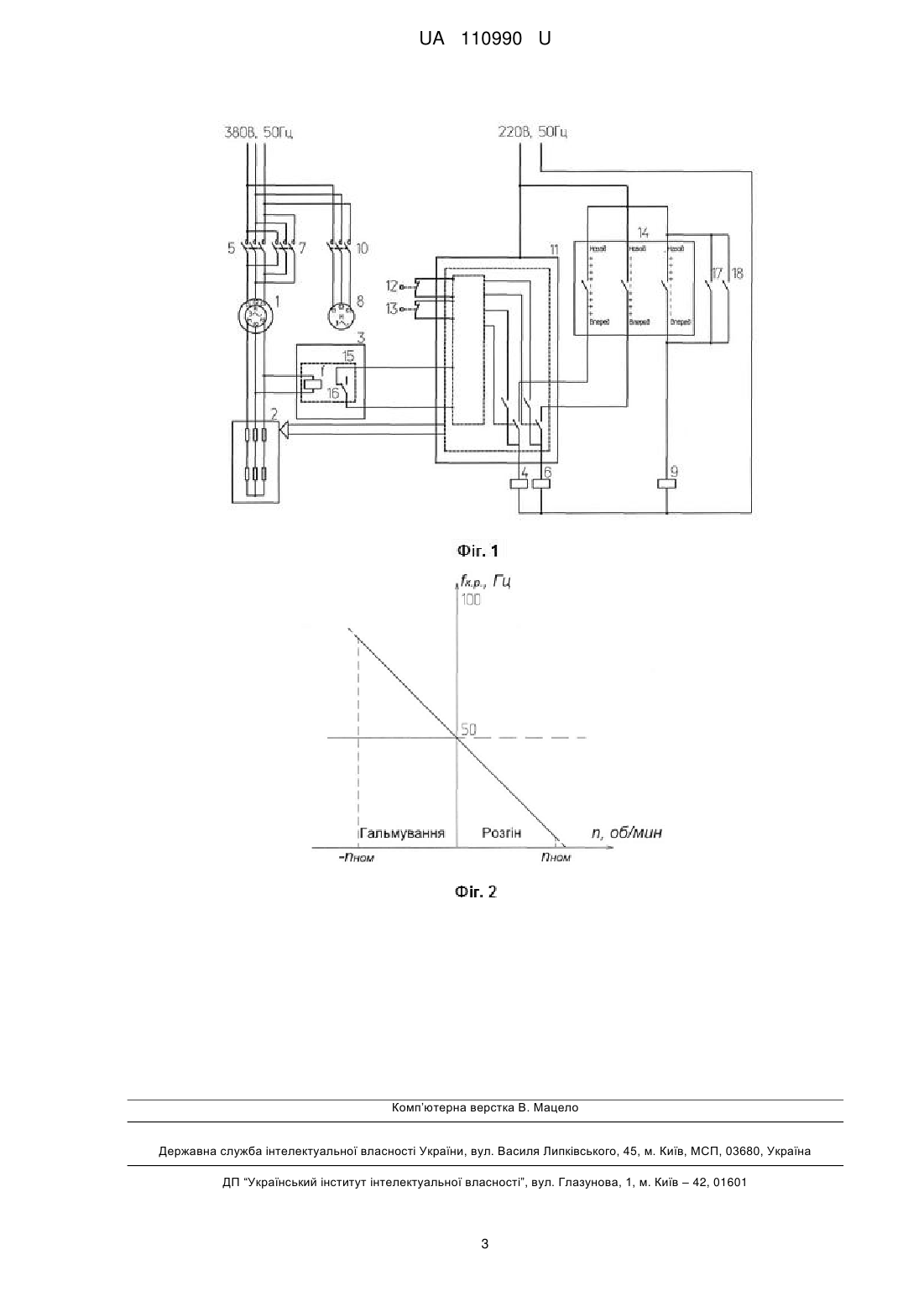
Реферат: Електропривод візка мостового крана містить асинхронний двигун з фазним ротором, кільця якого підключені до блока пускорегулювальних резисторів і блока контролю нульової швидкості, лінійні контактори із силовими контактами в колі статора, електромеханічне гальмо, з'єднуване з мережею через контактор, а також керуючу схему, що з'єднана з кінцевими вимикачами і командоконтролером. Блок контролю нульової швидкості оснащений реле частоти, сигнал на вхід якого подається безпосередньо з кілець ротора, а його виконавчі контакти введені в коло керуючої схеми, яке перемикає лінійні контактори, контактор керування електромеханічним гальмом і секції блока пускорегулювальних резисторів. UA 110990 U (12) UA 110990 U UA 110990 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до галузі підйому і переміщення вантажів, а саме до конструктивних елементів вантажопіднімальних кранів, і може бути використана в машинобудуванні при виготовленні мостових кранів. Відомий електропривод ходу крана, що містить асинхронний двигун, лінійні контактори, електромеханічне гальмо і керуючу схему (див. Ф.М. Четирбок "Торможение крановых механизмов" М.:Машгиз, 1950, с.22). Гальмування в цьому електроприводі забезпечується переключенням асинхронного двигуна в реверсивний режим, а керуюча схема дає можливість регулювання режиму пуску й зупинки. Недоліком такого пристрою є те, що час режиму противмикання асинхронного двигуна задає реле часу керуючого блока, а час до повної зупинки асинхронного двигуна залежить від навантаження на його валу, внаслідок чого, накладення електромеханічного гальма часто відбувається під час руху крана, що веде до високих динамічних навантажень на конструкцію крана і призводить до розгойдування вантажу. Цей недолік частково усунутий в іншому відомому електроприводі візка мостового крана, який для контролю зупинки візка, оснащений блоком контролю нульової швидкості (див. А.Г. Яуре, Е.М. Певзнер "Крановый электропривод": Довідник. - М: Энергоатомиздат, 1988, с. 256259). Такий електропривод є найбільш близьким до того, що заявляється по сукупності істотних ознак і приймається як прототип. Відомий електропривод візка мостового крана, також як і той, що заявляється, містить асинхронний двигун з фазним ротором, кільця якого підключені до блока пускорегулювальних резисторів і блока контролю нульової швидкості, лінійні контактори із силовими контактами в колі статора, електромеханічне гальмо, з'єднуване з мережею через контактор, а також керуючу схему, що з'єднана з кінцевими вимикачами і командоконтролером. Завдяки наявності блока контролю нульової швидкості у відомому рішенні підвищується точність накладення електромеханічного гальма при близькій до нуля частоті обертання вала асинхронного двигуна, однак застосування в блоці контролю нульової швидкості реле напруги, котушка якого включена на різницю напруг, пропорційних випрямленій діодним мостом напрузі з обмоток ротора й опорній напрузі живильної мережі, приводить до впливу напруги живильної мережі на точність визначення нульової швидкості. Крім того, напруга з обмоток ротора залежить від навантаження, прикладеного до вала двигуна і може змінюватися в залежності від ваги переміщуваного вантажу. В основу корисної моделі поставлена задача - створити електропривод візка мостового крана, який забезпечує підвищення продуктивності і довговічності крана, з одночасним підвищенням безпеки транспортування вантажу, за рахунок технічного результату, що полягає у виключенні різкого росту величини прискорення візка при гальмуванні. Поставлена задача вирішується тим, що в електроприводі візка мостового крана, що містить асинхронний двигун з фазним ротором, кільця якого підключені до блока пускорегулювальних резисторів і блока контролю нульової швидкості, лінійні контактори із силовими контактами в колі статора, електромеханічне гальмо, з'єднуване з мережею через контактор, а також керуючу схему, що з'єднана з кінцевими вимикачами і командоконтролером, відповідно до корисної моделі, блок контролю нульової швидкості оснащений реле частоти, сигнал на вхід якого подається безпосередньо з кілець ротора, а його виконавчі контакти введені в коло керуючої схеми, яке перемикає лінійні контактори, контактор керування електромеханічним гальмом і секції блока пускорегулювальних резисторів. Між відмітними ознаками корисної моделі і технічним результатом є причинно-наслідковий зв'язок. За рахунок того, що блок контролю нульової швидкості оснащений реле частоти, виконавчі контакти якого введені в коло керуючої схеми, яке перемикає лінійні контактори, контактор керування електромеханічним гальмом і секції блока пускорегулювальних резисторів, підвищується точність контролю нульової частоти обертання асинхронного двигуна, при визначенні якої реле частоти подає сигнал у схему керування на відключення контакторів, які знеструмлюють статорну обмотку двигуна і обмотку електромеханічного гальма. У цей момент швидкість візка крана є близькою до нуля, що при накладенні гальма виключає різкі зміни величини прискорення візка, а отже, зменшує розгойдування вантажу і знижує динамічні навантаження на металоконструкцію крана. Крім того, подання вхідного сигналу на реле частоти безпосередньо з кілець ротора, без додаткових узгоджувальних кіл, дозволяє зменшити обсяг монтажних і налагоджувальних робіт при введенні крана в експлуатацію, ремонті чи модернізації зі зміною параметрів двигуна. Корисна модель пояснюється кресленнями, на яких: на фіг. 1 - зображена принципова схема електропривода візка мостового крана; 1 UA 110990 U 5 10 15 20 25 на фіг. 2 - діаграма залежності частоти на обмотках ротора в залежності від режиму роботи двигуна. Електропривод візка мостового крана містить асинхронний двигун 1 з фазним ротором, кільця якого підключені до блока 2 пускорегулювальних резисторів і блока 3 контролю нульової швидкості, лінійні контактор 4 із силовими контактами 5 і контактор 6 із силовими контактами 7 у колі статора, електромеханічне гальмо 8, керуючий ним контактор 9 із силовими контактами 10, а також керуючу схему 11, яка з'єднана з кінцевими вимикачами 12, 13 і командоконтролером 14. Відмінністю корисної моделі є те, що блок 3 контролю нульової швидкості оснащений реле частоти 15, сигнал на вхід якого подається безпосередньо з обмоток ротора асинхронного двигуна 1. Виконавчі контакти 16 реле 15 введені в коло керуючої схеми, яке перемикає лінійні контактори 4, 6, контактор 9 керування електромеханічним гальмом 8 і секції блока 2 пускорегулювальних резисторів. Електропривод візка мостового крана працює наступним чином. Під час роботи мостового крана, реле частоти 15, налаштоване на частоту спрацьовування 50 Гц, контролює частоту сигналу, що надходить з обмоток ротора асинхронного двигуна 1 переміщення візка крана. При русі візка вперед чи назад включений відповідно лінійний контактор 4 чи 6, а також контактор 9, що подає напругу через контакти 10 на електромеханічне гальмо 8 для розгальмовування вала двигуна 1. Гальмування візка крана здійснюється подачею команди від командоконтролера 14, переведенням його в положення "0" чи при спрацьовуванні кінцевого вимикача 12 чи 13, що видає команду на зниження швидкості. Переключенням силових контактів 5, 7 робиться зміна порядкування фаз живильної напруги на обмотках статора асинхронного двигуна 1, який починає гальмування в режимі противмикання, при цьому керуюча схема 11 перемикає на максимальний опір блок 2 пускорегулювальних резисторів. Частота fк.р. на обмотках ротора асинхронного двигуна 1 (фіг. 2) змінюється згідно з залежністю: n n , fк.р. fм 0 n0 де fм - частота живильної мережі; 30 35 40 fм - синхронна частота обертання вала асинхронного двигуна; n - фактична частота обертання вала асинхронного двигуна. В момент противмикання fк.р. перевищує 50 Гц і знижується в міру зниження швидкості візка. При нульовій кутовій швидкості вала двигуна 1, частота на обмотках ротора стає рівною 50 Гц, спрацьовує реле частоти 15, виконавчі контакти 16 якого відключають лінійні контактори 4, 6. Після розмикання додаткових контактів 17, 18 контакторів 4, 6 відключається контактор 9, керування електромеханічним гальмом 8, при цьому контакти 5, 7, 10 розмикаються та знеструмлюють статорну обмотку двигуна 1 і обмотку електромеханічного гальма 8, яке фіксує вал двигуна 1. Як видно з опису конструкції і роботи електропривода візка мостового крана, за рахунок відмітних ознак корисної моделі, виключається різкий ріст величини прискорення візка при гальмуванні, що підвищує продуктивність і довговічності крана, з одночасним підвищенням безпеки транспортування вантажу, що особливо важливо при транспортуванні розплавленого металу. По даному рішенню на "Новокраматорському машинобудівному заводі" розроблений технічний проект мостового крана. 45 ФОРМУЛА КОРИСНОЇ МОДЕЛІ 50 55 Електропривод візка мостового крана, що містить асинхронний двигун з фазним ротором, кільця якого підключені до блока пускорегулювальних резисторів і блока контролю нульової швидкості, лінійні контактори із силовими контактами в колі статора, електромеханічне гальмо, з'єднуване з мережею через контактор, а також керуючу схему, що з'єднана з кінцевими вимикачами і командоконтролером, який відрізняється тим, що блок контролю нульової швидкості оснащений реле частоти, сигнал на вхід якого подається безпосередньо з кілець ротора, а його виконавчі контакти введені в коло керуючої схеми, яке перемикає лінійні контактори, контактор керування електромеханічним гальмом і секції блока пускорегулювальних резисторів. 2 UA 110990 U Комп’ютерна верстка В. Мацело Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
МПК / Мітки
МПК: B66C 13/30
Мітки: мостового, електропривод, візка, крана
Код посилання
<a href="https://ua.patents.su/5-110990-elektroprivod-vizka-mostovogo-krana.html" target="_blank" rel="follow" title="База патентів України">Електропривод візка мостового крана</a>
Пристрій для керування електроживленням крана мостового типу, наприклад перевантажувача
Номер патенту: 4417
Опубліковано: 17.01.2005
Автори: Куленцов Віктор Олександрович, Єфименко Клавдія Георгіївна
МПК: B66C 13/18, B66C 13/00
Мітки: типу, наприклад, перевантажувача, крана, керування, пристрій, мостового, електроживленням
Формула / Реферат:
1. Пристрій для керування електроживленням крана мостового типу, наприклад перевантажувача, що містить контактор вводу з котушкою, за допомогою якого джерело живлення з'єднане із силовими тролеями крана, реле напруги, обмотка якого підключена до силових тролеїв, послідовно з'єднані замикаючий і розмикаючий контакти кнопок керування, нульовий пускач, пускове й утримуюче реле, тролей керування, розташований паралельно силовим тролеям і...
Інерційний пристрій для визначення кінематичних параметрів мостового крана
Номер патенту: 77321
Опубліковано: 11.02.2013
Автори: Окунь Антон Олександрович, Цебренко Максим В'ячеславович, Зайцев Юрій Іванович, Григоров Отто Володимирович, Стрижак Всеволод Вікторович
МПК: B66C 13/46
Мітки: кінематичних, мостового, визначення, пристрій, крана, інерційний, параметрів
Формула / Реферат:
Інерційний пристрій для визначення кінематичних параметрів мостового крана, що містить герконові реле крайнього лівого, крайнього правого і середнього положення візка крана, закріплені на головній балці крана, і магніт, який встановлений на візку крана, а герконові реле підключені до блока точних координат візка крана, який приєднаний до реверсивного лічильника положення візка крана та компаратора, який відрізняється тим, що додатково...
Вантажний візок мостового крана
Номер патенту: 55338
Опубліковано: 10.12.2010
Автори: Михайлов Микола Олексійович, Ісакова Анна Миколаївна, Ісаков Микола Іванович, Кашанський Дмитро Анатолійович
МПК: B66C 17/00
Мітки: вантажний, мостового, візок, крана
Формула / Реферат:
1. Вантажний візок мостового крана, що містить раму з порталом на якій установлені механізми головного і допоміжного підйому вантажозахватного органа, зв'язані з ним через канатно-блокову систему, який відрізняється тим, що вантажозахватний орган виконаний у вигляді траверси і скоби, зв'язаних між собою гнучкими елементами, крім того траверса з'єднана з механізмом головного підйому, а скоба - з механізмом допоміжного підйому через...
Пристрій для гальмування електромеханічного приводу візка вантажопідйомного крана
Номер патенту: 75479
Опубліковано: 17.04.2006
Автори: Токарев Валерій Веніамінович, Конев Іван Сергійович, Токарев Веніамін Петрович, Кукса Євген Володимирович, Власов Валерій Вікторович, Салієв Андрій Іванович, Кірей Дмитро Анатолійович
МПК: F16D 51/00, H02P 3/18
Мітки: візка, пристрій, електромеханічного, приводу, вантажопідйомного, гальмування, крана
Формула / Реферат:
1. Пристрій для гальмування електромеханічного приводу візка вантажопідйомного крана, що містить загальне силове коло електродвигуна, у яке послідовно ввімкнений реверсивний контактор і паралельно - електродвигун гідроштовхача гальма, який відрізняється тим, що у загальне силове коло електродвигуна електромеханічного приводу візка паралельно ввімкнений блок автоматики двоступінчастого гальмування і паралельно - реле вмикання блока автоматики,...
Пристрій для обмеження розгойдувань вантажу, підвішеного до візка крана
Номер патенту: 30454
Опубліковано: 25.02.2008
Автори: Ромасевич Юрій Олександрович, Ярошенко Володимир Федорович, Ловейкін Вячеслав Сергійович
МПК: B66C 13/04
Мітки: вантажу, обмеження, крана, підвішеного, візка, розгойдувань, пристрій
Формула / Реферат:
Пристрій для обмеження розгойдувань вантажу, підвішеного до візка крана, що містить електропривід візка, датчик ваги вантажу, регулятор швидкості візка, джерело постійної напруги, який відрізняється тим, що обладнаний датчиком довжини каната, який підключений до першого входу блока-формувача часу розгону візка, з можливістю надходження на його другий вхід сигналу від блока-формувача номінальної швидкості візка, таймером, приєднаним до блока...
Попередній патент: Спосіб одержання полімерної композиції на основі політетрафторетилену
Наступний патент: Пристрій для очищення та збереження води в польових умовах
Випадковий патент: Троакар