Інерційний пристрій для визначення кінематичних параметрів мостового крана
Номер патенту: 77321
Опубліковано: 11.02.2013
Автори: Окунь Антон Олександрович, Цебренко Максим В'ячеславович, Григоров Отто Володимирович, Стрижак Всеволод Вікторович, Зайцев Юрій Іванович


Формула / Реферат
Інерційний пристрій для визначення кінематичних параметрів мостового крана, що містить герконові реле крайнього лівого, крайнього правого і середнього положення візка крана, закріплені на головній балці крана, і магніт, який встановлений на візку крана, а герконові реле підключені до блока точних координат візка крана, який приєднаний до реверсивного лічильника положення візка крана та компаратора, який відрізняється тим, що додатково обладнаний герконовими реле крайнього лівого, крайнього правого і середнього положення моста крана, закріпленими на трасі крана, і магнітом, який встановлений на кінцевій балці крана, а герконові реле підключені до блока точних координат моста крана, підключеного до реверсивного лічильника положення моста крана та компаратора, також обладнаний датчиком руху візка, який складається з двох акселерометрів, кожен з яких підключений до фільтрів високої частоти, виходи яких поєднані з дисплеєм та двома електронними інтеграторами, на входи яких підключений таймер, при цьому вихід першого електронного інтегратора підключений до двох реверсивних лічильників, входи яких підключені до зовнішньої системи керування краном, а виходи реверсивних лічильників підключені до дисплея і входу другого електронного інтегратора, який своїм виходом підключений до двох реверсивних лічильників положення візка та моста крана, виходи яких приєднані до дисплея та компаратора, причому вихід компаратора підключений до цих же реверсивних лічильників положення візка та моста крана, крім того виходи блоків точних координат візка та моста крана підключені до відповідних реверсивних лічильників положення візка та моста крана та компаратора, а на їх входи підключені герконові реле крайнього лівого, крайнього правого і середнього положення візка крана та герконові реле крайнього лівого, крайнього правого і середнього положення моста крана.
Текст
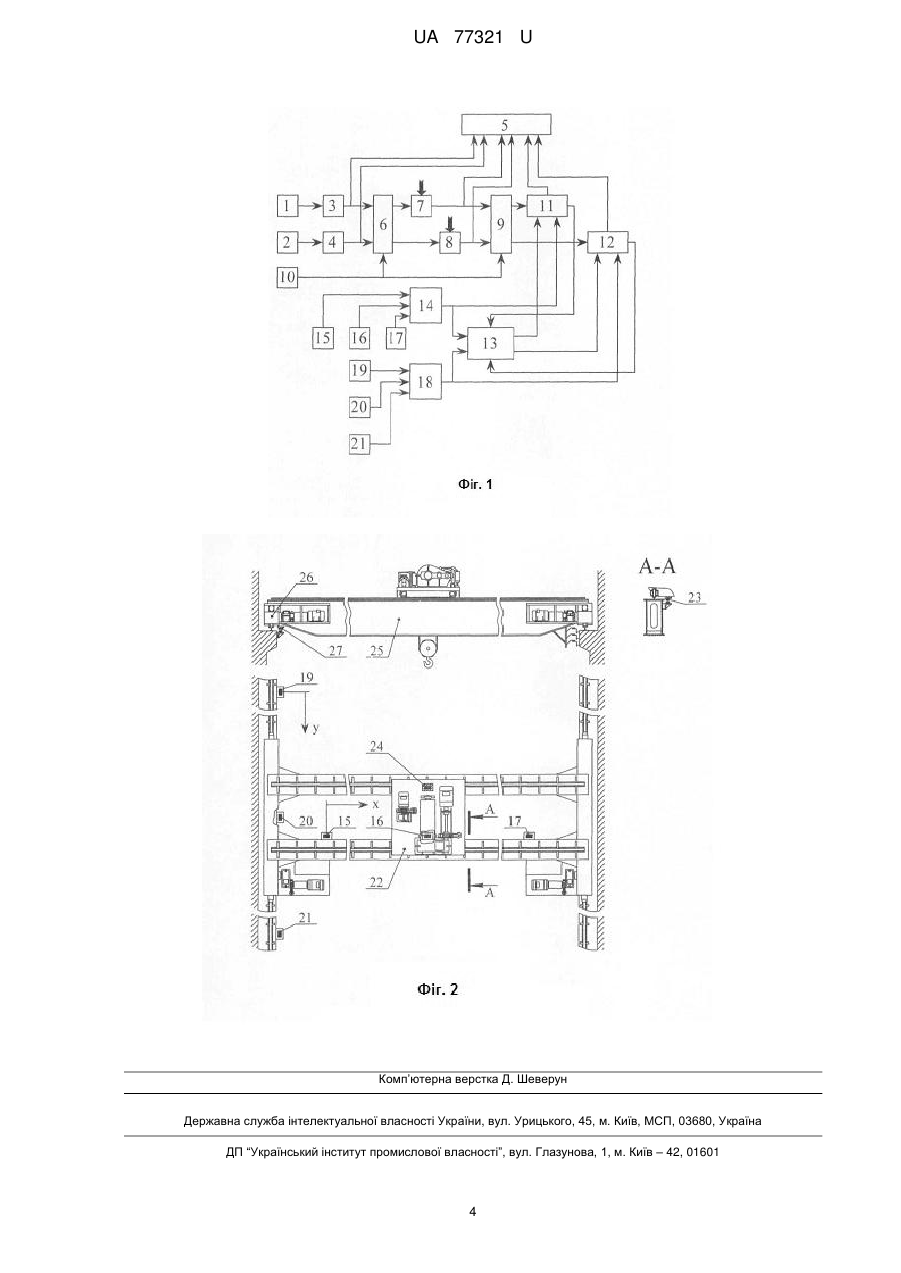
Реферат: Інерційний пристрій для визначення кінематичних параметрів мостового крана, що містить герконові реле крайнього лівого, крайнього правого і середнього положення візка крана, закріплені на головній балці крана, і магніт, який встановлений на візку крана, а герконові реле підключені до блока точних координат візка крана, який приєднаний до реверсивного лічильника положення візка крана та компаратора, крім того додатково обладнаний герконовими реле крайнього лівого, крайнього правого і середнього положення моста крана, закріпленими на трасі крана, і магнітом, який встановлений на кінцевій балці крана, а герконові реле підключені до блока точних координат моста крана, підключеного до реверсивного лічильника положення моста крана та компаратора, також обладнаний датчиком руху візка, який складається з двох акселерометрів, кожен з яких підключений до фільтрів високої частоти, виходи яких поєднані з дисплеєм та двома електронними інтеграторами, на входи яких підключений таймер, при цьому вихід першого електронного інтегратора підключений до двох реверсивних лічильників, входи яких підключені до зовнішньої системи керування краном, а виходи реверсивних лічильників підключені до дисплея і входу другого електронного інтегратора, який своїм виходом підключений до двох реверсивних лічильників положення візка та моста крана, виходи яких приєднані до дисплея та компаратора, причому вихід компаратора підключений до цих же реверсивних лічильників положення візка та моста крана, крім того виходи блоків точних координат візка та моста крана підключені до відповідних реверсивних лічильників положення візка та моста крана та компаратора, а на їх входи підключені герконові реле крайнього лівого, крайнього правого і середнього положення візка крана та герконові реле крайнього лівого, крайнього правого і середнього положення моста крана. UA 77321 U (12) UA 77321 U UA 77321 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до підйомно-транспортної техніки, зокрема до пристроїв, які здійснюють моніторинг кінематичних параметрів мостових кранів. Відомі способи визначення положень механізмів вантажопідйомних машин базуються на перетворенні лінійного або кутового переміщення складових частин цих механізмів в імпульси напруги. При цьому необхідною умовою роботи більшості відомих пристроїв є знаходження їх перетворюючих елементів в механічному зв'язку чи в безпосередній близькості від конструктивних елементів цих механізмів, рухомих елементів вантажопідйомної машини або рейкового шляху. За окремими схемами існує механічний зв'язок між конструктивними елементами вантажопідйомної машини або рейкового шляху та елементами пристроїв, що здійснюють моніторинг кінематичних параметрів кранових механізмів. Так, для механізмів пересування кранів та кранових візків поширеними є схеми, в яких використовуються імпульсні датчики руху, елементи яких мають механічний зв'язок з валом приводного двигуна або з холостим колесом чи спеціальним неприводним роликом. В першому випадку існує ймовірність виникнення похибки внаслідок пробуксовки або юзу приводного колеса. В другому випадку ймовірність проковзування колеса менше, проте елементи пристроїв виявляються рознесеними в просторі, що тягне за собою наступні недоліки: збільшення матеріаломісткості, необхідність прийняття заходів щодо завадозахищеності (крани працюють в умовах сильних електромагнітних полів). Недоліком датчиків руху для визначення положення візка крана, які базуються на використанні лазерних, інфрачервоних або електромагнітних хвиль, є необхідність забезпечення спеціальних зон фокусування вимірювального променя, причому під час роботи між датчиком та цією зоною не повинні опинятися сторонні предмети [1]. Найбільш близьким за технічною суттю до запропонованої корисної моделі є пристрій для визначення кінематичних параметрів кранового візка, будова якого складається з герконових реле, закріплених на кран-балці, магніту, який встановлений на візку крана і взаємодіє з герконовими реле, датчика руху візка, який конструктивно складається з колеса з прорізями, через які здійснюється оптичний зв'язок світлодіода і фотодіода датчика прямого руху та світлодіода і фотодіода датчика зворотного руху візка [2]. Недоліком такого пристрою є неможливість визначення положень візка більше ніж за однією віссю, а також наявність механічного зв'язку між елементами датчика руху з крановим шляхом, що знижує стійкість до відмов і збільшує матеріалоємність пристрою. Задачею корисної моделі є забезпечення можливості визначення положень візка в двох напрямках, а також усунення механічного зв'язку між елементами датчика руху та крановим шляхом, що збільшить надійність та зменшить матеріалоємність пристрою. Поставлена задача вирішується за рахунок того, що відомий пристрій для визначення кінематичних параметрів кранового візка, що містить герконові реле крайнього лівого, крайнього правого і середнього положення візка крана, закріплені на головній балці крана, і магніт, який встановлений на візку крана, а герконові реле підключені до блока точних координат візка крана, який приєднаний до реверсивного лічильника положення візка крана та компаратора, згідно з корисною моделлю, додатково обладнаний герконовими реле крайнього лівого, крайнього правого і середнього положення моста крана, закріпленими на трасі крана, і магнітом, який встановлений на кінцевій балці крана, а герконові реле підключені до блока точних координат моста крана, підключеного до реверсивного лічильника положення моста крана та компаратора, також обладнаний датчиком руху візка, який складається з двох акселерометрів, кожен з яких підключений до фільтрів високої частоти, виходи яких поєднані з дисплеєм та двома електронними інтеграторами, на входи яких підключений таймер, при цьому вихід першого електронного інтегратора підключений до двох реверсивних лічильників, входи яких підключені до зовнішньої системи керування краном, а виходи реверсивних лічильників підключені до дисплея і входу другого електронного інтегратора, який своїм виходом підключений до двох реверсивних лічильників положення візка та моста крана, виходи яких приєднані до дисплея та компаратора, причому вихід компаратора підключений до цих же реверсивних лічильників положення візка та моста крана, крім того виходи блоків точних координат візка та моста крана підключені до відповідних реверсивних лічильників положення візка та моста крана та компаратора, а на їх входи підключені герконові реле крайнього лівого, крайнього правого і середнього положення візка крана та герконові реле крайнього лівого, крайнього правого і середнього положення моста крана. На фіг. 1 представлена функціональна схема пристрою, на фіг. 2 - схема розташування датчика руху візка, магнітів і герконових реле. Пристрій містить акселерометри 1 і 2, виходи яких підключені до фільтрів високої частоти 3 і 4 відповідно. Виходи фільтрів високої частоти підключені до входів дисплея 5 та електронного інтегратора 6. Вихід електронного інтегратора 6 підключений до входів реверсивних лічильників 1 UA 77321 U 5 10 15 20 25 30 35 40 45 50 55 60 7 і 8, входи яких підключені до зовнішніх систем керування краном, а виходи до дисплея 5 та входів електронного інтегратора 9. До входів електронних інтеграторів 6 і 9 підключений таймер 10. Виходи електронного інтегратора 9 підключені до входів реверсивного лічильника положення візка крана 11 та реверсивного лічильника положення моста крана 12, виходи яких підключені до дисплея та компаратора 13. Вихід блока точних координат візка крана 14 (переміщення візка за віссю "х", фіг. 2) підключений до реверсивного лічильника положення візка крана 11 та до компаратора 13. На входи блока точних координат візка крана 14 підключені герконові реле крайнього лівого 15, середнього 16 та крайнього правого 17 положення візка крана. Вихід блока точних координат моста крана 18 (переміщення візка за віссю "у", фіг. 2) підключений до реверсивного лічильника положення моста крана 12 та компаратора 13. На входи блока точних координат моста крана 18 підключені герконові реле крайнього лівого 19, середнього 20 та крайнього правого 21 положення моста крана. Вихід компаратора 13 підключений до реверсивного лічильника положення візка крана 11 і реверсивного лічильника положення моста крана 12. На крановому візку 22 закріплені магніт 23 та датчик руху 24, який складається з двох акселерометрів 1 і 2. На головній балці крана 25 закріплені герконові реле крайнього лівого 15, середнього 16 та крайнього правого 17 положення візка крана, а на кінцевій балці 26 закріплений магніт 27. Герконові реле крайнього лівого 19, середнього 20 та крайнього правого 21 положення моста крана закріплені вздовж траси крана. Пристрій працює таким чином. Перед початком перевантажувального циклу система керування краном посилає сигнал на реверсивний лічильник 7, який містить дані про поточну миттєву швидкість візка крана, і сигнал на реверсивний лічильник 8 з даними про поточну миттєву швидкість моста крана. Миттєва поточна швидкість візка і моста крана в цей час буде дорівнювати нулю. Прискорення руху візка 22 мостового крана призводить до формування в акселерометрі 1 імпульсів напруги, які, проходячи через фільтр високих частот 3, передаються на дисплей 5 і вхід електронного інтегратора 6. Прискорення руху моста крана і, відповідно, головної балки 25 призводить до формування в акселерометрі 2 імпульсів напруги, які, проходячи через фільтр високих частот 4, так само, передаються на дисплей 5 і вхід електронного інтегратора 6. З виходу електронного інтегратора 6 сигнал, який надійшов від акселерометра 1, проходячи через реверсивний лічильник 7, передається на дисплей та вхід електронного інтегратора 9, а сигнал, який надійшов з акселерометра 2, проходить через реверсивний лічильник 8 і також передається на дисплей та вхід електронного інтегратора 9. Таймер 10, підключений до електронних інтеграторів 6 і 9, задає крок інтегрування. З виходу електронного інтегратора 9 сигнал, який надійшов з реверсивного лічильника 7, потрапляє на вхід реверсивного лічильника положення візка крана 11, а сигнал, який надійшов з реверсивного лічильника 8, потрапляє на вхід реверсивного лічильника положення моста крана 12. Реверсивні лічильники положення візка крана 11 і положення моста крана 12 формують паралельні коди на виходах. Коли візок та міст крана рухаються в протилежному напрямку, реверсивні лічильники здійснюють зворотний відлік. Сигнали з реверсивних лічильників положення візка крана 11 і положення моста крана 12 передаються на дисплей 5. Таким чином, на дисплеї відображаються миттєве прискорення в напрямку руху візка 22 (координата "х") і руху моста крана (координата "у"), миттєва швидкість в двох напрямках та поточна координата візка за двома осями - "х" та "у". Запобігання накопиченню помилки і точність пропонованого пристрою забезпечується введенням в його склад двох блоків точних координат візка крана 14 і моста крана 18. Коректування координати візка крана за віссю "х" забезпечується тим, що під час проходження магніту 23 над одним з герконових реле крайнього лівого 15, середнього 16 та крайнього правого 17 положення візка крана воно спрацьовує. При цьому на виході блока точних координат візка крана 14 формується паралельний код крайнього лівого, крайнього правого або середнього положення на головній балці в залежності від того, яке герконове реле спрацювало. Паралельні коди з блока точних координат візка крана 14 та реверсивного лічильника положення візка крана 11 надходять на компаратор 13, де порівнюються між собою. У випадку, коли вони не рівні, компаратор 13 формує сигнал, який надходить на вхід реверсивного лічильника положення візка крана 11. Останній переключається в режим паралельного завантаження даних з блока точних координат візка крана 14. Аналогічним чином відбувається коректування координати візка за віссю "у". Під час проходження магніту 27 над одним з герконових реле крайнього лівого 19, середнього 20 та крайнього правого 21 положення моста крана воно спрацьовує. При цьому на виході блока точних координат моста крана 18 формується паралельний цифровий код крайнього лівого, крайнього правого або середнього положення моста крана, і, відповідно, візка в напрямку траси крана, в залежності від того, яке 2 UA 77321 U 5 10 15 20 герконове реле спрацювало. Паралельні коди з блока точних координат моста крана 18 та реверсивного лічильника положення моста крана 12 надходять на компаратор 13, де порівнюються між собою. У випадку, коли вони не рівні, компаратор 13 формує сигнал, який надходить на вхід реверсивного лічильника положення моста крана 12. Останній переключається в режим паралельного завантаження даних з блока точних координат моста крана 18. Після закінчення перевантажувального циклу система керування краном, посилає сигнал на реверсивний лічильник 7, який містить дані про поточну миттєву швидкість візка, і сигнал на реверсивний лічильник 8 з даними про поточну миттєву швидкість моста крана. Цим моментом може бути, наприклад, момент замикання механічних гальм механізмів пересування. Миттєва поточна швидкість візка і моста крана в цей час буде знову дорівнювати нулю. Таким чином, здійснюється моніторинг координати, швидкості та прискорення візка в двох напрямках за порівняно малої кількості елементів та відсутності механічного зв'язку між елементами датчика руху та крановим шляхом. Отже, пристрій має високу надійність, незначну кількість складових і підвищує безпечність роботи крана. Джерела інформації: 1. Дж. Фрайден Современные датчики. Справочник. Пер. с англ. / Дж. Фрайден - М: Техносфера. - 2005. - 592 С. 6 2. Пат. 31546 Україна, МПК В 66 С 13/00. Пристрій для визначення кінематичних параметрів кранового візка / Ловейкін В.С, Ярошенко В.Ф., Ромасевич Ю.О. ; заявник та власник патенту Національний аграрний університет. - № u200714346; заявл. 19.12.2007; опубл. 10.04.2008, Бюл. № 7. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 25 30 35 40 45 Інерційний пристрій для визначення кінематичних параметрів мостового крана, що містить герконові реле крайнього лівого, крайнього правого і середнього положення візка крана, закріплені на головній балці крана, і магніт, який встановлений на візку крана, а герконові реле підключені до блока точних координат візка крана, який приєднаний до реверсивного лічильника положення візка крана та компаратора, який відрізняється тим, що додатково обладнаний герконовими реле крайнього лівого, крайнього правого і середнього положення моста крана, закріпленими на трасі крана, і магнітом, який встановлений на кінцевій балці крана, а герконові реле підключені до блока точних координат моста крана, підключеного до реверсивного лічильника положення моста крана та компаратора, також обладнаний датчиком руху візка, який складається з двох акселерометрів, кожен з яких підключений до фільтрів високої частоти, виходи яких поєднані з дисплеєм та двома електронними інтеграторами, на входи яких підключений таймер, при цьому вихід першого електронного інтегратора підключений до двох реверсивних лічильників, входи яких підключені до зовнішньої системи керування краном, а виходи реверсивних лічильників підключені до дисплея і входу другого електронного інтегратора, який своїм виходом підключений до двох реверсивних лічильників положення візка та моста крана, виходи яких приєднані до дисплея та компаратора, причому вихід компаратора підключений до цих же реверсивних лічильників положення візка та моста крана, крім того виходи блоків точних координат візка та моста крана підключені до відповідних реверсивних лічильників положення візка та моста крана та компаратора, а на їх входи підключені герконові реле крайнього лівого, крайнього правого і середнього положення візка крана та герконові реле крайнього лівого, крайнього правого і середнього положення моста крана. 3 UA 77321 U Комп’ютерна верстка Д. Шеверун Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 4
ДивитисяДодаткова інформація
Назва патенту англійськоюInertial device for determining kinematic parameters of bridge crane
Автори англійськоюHryhorov Otto Volodymyrovych, Stryzhak Vsevolod Viktorovych, Okun Anton Oleksandrovych, Zaitsev Yurii Ivanovych, Tsebrenko Maksym Viacheslavovych
Назва патенту російськоюИнерционное устройство для определения кинематических параметров мостового крана
Автори російськоюГригоров Отто Владимирович, Стрижак Всеволод Викторович, Окунь Антон Александрович, Зайцев Юрий Иванович, Цебренко Максим Вячеславович
МПК / Мітки
МПК: B66C 13/46
Мітки: параметрів, крана, пристрій, інерційний, визначення, мостового, кінематичних
Код посилання
<a href="https://ua.patents.su/6-77321-inercijjnijj-pristrijj-dlya-viznachennya-kinematichnikh-parametriv-mostovogo-krana.html" target="_blank" rel="follow" title="База патентів України">Інерційний пристрій для визначення кінематичних параметрів мостового крана</a>
Пристрій для визначення кінематичних параметрів кранового візка
Номер патенту: 31546
Опубліковано: 10.04.2008
Автори: Ярошенко Володимир Федорович, Ловейкін Вячеслав Сергійович, Ромасевич Юрій Олександрович
МПК: B66C 13/00
Мітки: визначення, кранового, кінематичних, пристрій, параметрів, візка
Формула / Реферат:
Пристрій для визначення кінематичних параметрів кранового візка, що містить герконові реле (чутливі елементи): крайнього лівого, крайнього правого і середнього положень, закріплені на кран-балці, і магніт, який встановлений на візку крана та взаємодіє з герконовими реле, який відрізняється тим, що обладнаний датчиком руху візка, який складається з датчика прямого та датчика зворотного руху візка, які підключені до блока визначення напрямку...
Спосіб безконтактного визначення просторового положення вантажної підвіски спеціального мостового крана кругової дії
Номер патенту: 31970
Опубліковано: 25.04.2008
Автор: Крюгер Георг Вернер
МПК: B66C 17/00
Мітки: безконтактного, мостового, просторового, положення, дії, визначення, крана, кругової, спеціального, підвіски, спосіб, вантажної
Формула / Реферат:
1. Спосіб безконтактного визначення просторового положення вантажної підвіски спеціального мостового крана кругової дії, згідно з яким визначення відбувається із застосуванням світловіддалемірів, який відрізняється тим, що як світловіддалеміри застосовують лазерні далекоміри, а положення вантажної підвіски мостового крана кругової дії визначають розрахунково-керуючим контролером через вимірювання та введення в контролер трьох складових...
Пристрій для керування електроживленням крана мостового типу, наприклад перевантажувача
Номер патенту: 4417
Опубліковано: 17.01.2005
Автори: Єфименко Клавдія Георгіївна, Куленцов Віктор Олександрович
МПК: B66C 13/00, B66C 13/18
Мітки: наприклад, крана, керування, перевантажувача, типу, електроживленням, пристрій, мостового
Формула / Реферат:
1. Пристрій для керування електроживленням крана мостового типу, наприклад перевантажувача, що містить контактор вводу з котушкою, за допомогою якого джерело живлення з'єднане із силовими тролеями крана, реле напруги, обмотка якого підключена до силових тролеїв, послідовно з'єднані замикаючий і розмикаючий контакти кнопок керування, нульовий пускач, пускове й утримуюче реле, тролей керування, розташований паралельно силовим тролеям і...
Спосіб визначення технічного стану зубчатого зачеплення редуктора мостового електричного крана

Номер патенту: 58238
Опубліковано: 11.04.2011
Автори: Колесник Елеонора Олександрівна, Сушко Лариса Федорівна, Кадильникова Тетяна Михайлівна
МПК: G01M 7/00, G01M 13/00
Мітки: мостового, крана, електричного, зубчатого, спосіб, зачеплення, технічного, редуктора, визначення, стану
Формула / Реферат:
Спосіб визначення технічного стану зубчатого зачеплення редуктора мостового електричного крана, що включає періодичне вимірювання під час захвату вантажа на вхідному ступені редуктора значимого вібропараметра, який відрізняється тим, що під час вимірювання визначається набір частот модуляції, що порівнюється з граничним значенням максимальної з парціальних глибин модуляції вібрації.
Вантажний візок мостового крана
Номер патенту: 55338
Опубліковано: 10.12.2010
Автори: Ісакова Анна Миколаївна, Кашанський Дмитро Анатолійович, Ісаков Микола Іванович, Михайлов Микола Олексійович
МПК: B66C 17/00
Мітки: вантажний, візок, крана, мостового
Формула / Реферат:
1. Вантажний візок мостового крана, що містить раму з порталом на якій установлені механізми головного і допоміжного підйому вантажозахватного органа, зв'язані з ним через канатно-блокову систему, який відрізняється тим, що вантажозахватний орган виконаний у вигляді траверси і скоби, зв'язаних між собою гнучкими елементами, крім того траверса з'єднана з механізмом головного підйому, а скоба - з механізмом допоміжного підйому через...
Попередній патент: Тренажер для трепанації кісток черепа
Наступний патент: Спосіб лікування свербежу шкіри у хворих на програмному гемодіалізі
Випадковий патент: Газліфтний барботажний апарат