Механізм прямолінійного переміщення матеріального тіла
Номер патенту: 113573
Опубліковано: 10.02.2017
Автори: Амбарцумянц Роберт Вачаганович, Амбарцумянц Рубен Робертович
Формула / Реферат
Механізм прямолінійного переміщення матеріального тіла, який містить корпус, ведучий вал з кривошипом, рухому зірочку з валиком, нерухому зірочку, ланцюгову передачу з передаточним відношенням «два» і шатун, який відрізняється тим, що на нерухомій зірочці шарнірно з'єднаний важіль з довжиною, яка дорівнює довжині кривошипа, другим кінцем важіль шарнірно з'єднаний з важільцем, довжина якого дорівнює довжині відстані між центрами обертання кривошипа та важеля, а також з додатковим шатуном, довжина якого дорівнює довжині кривошипа, важілець шарнірно сполучений з валиком рухомої зірочки, шатун та додатковий шатун на кінцях їх довжини шарнірно сполучені з матеріальним тілом, а відстань між центрами шарнірних сполучень на матеріальному тілі дорівнює довжині важільця.
Текст
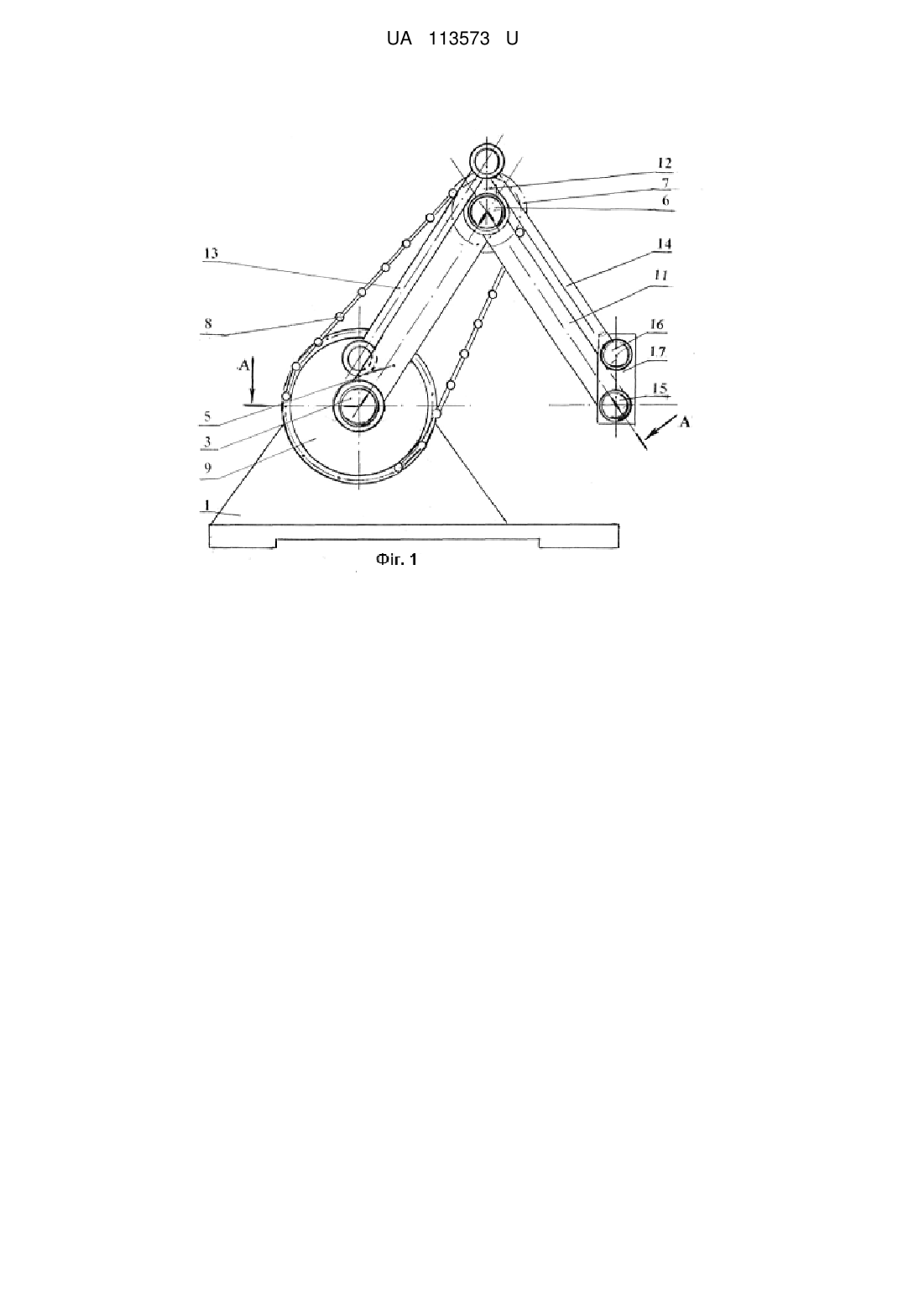
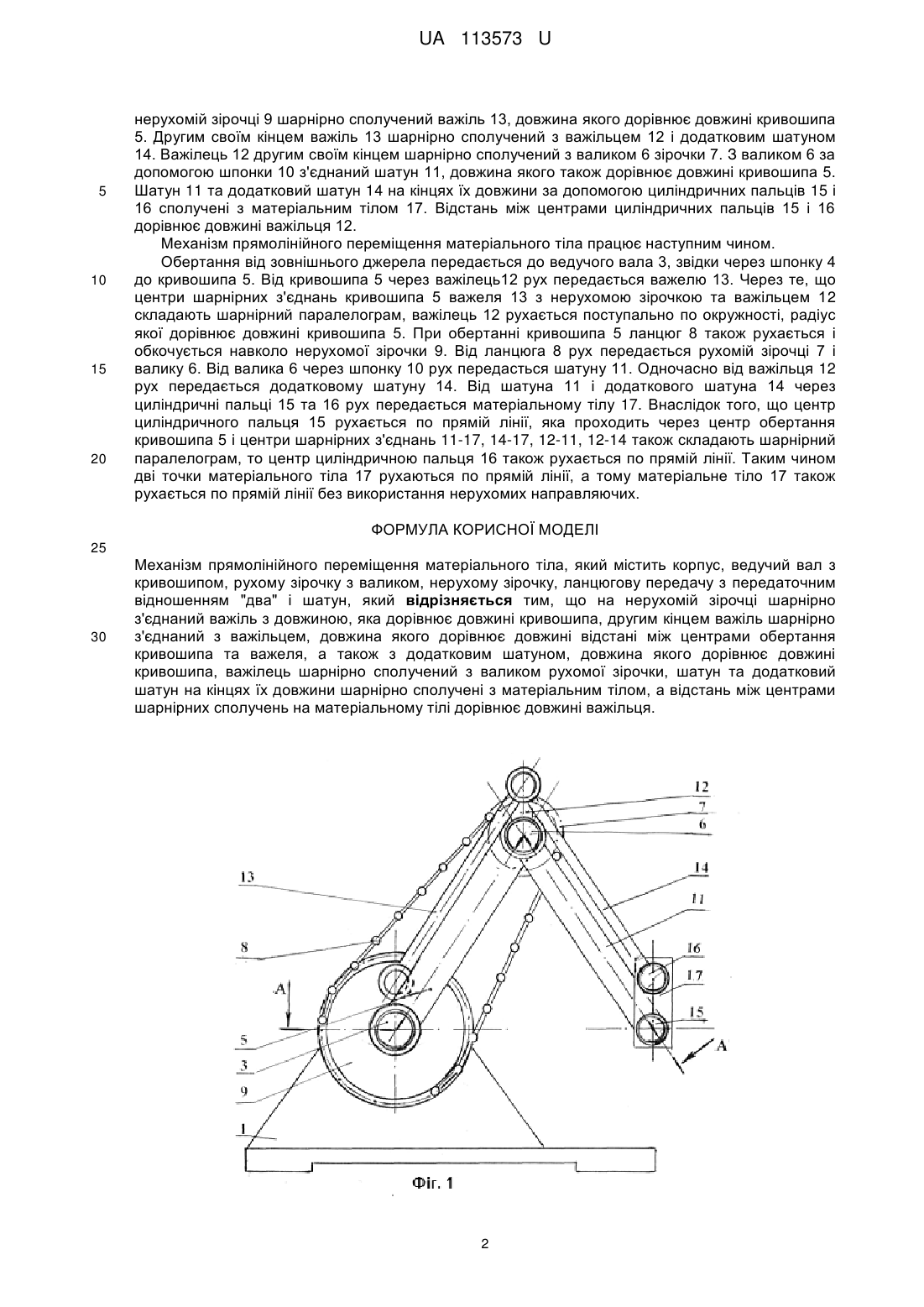
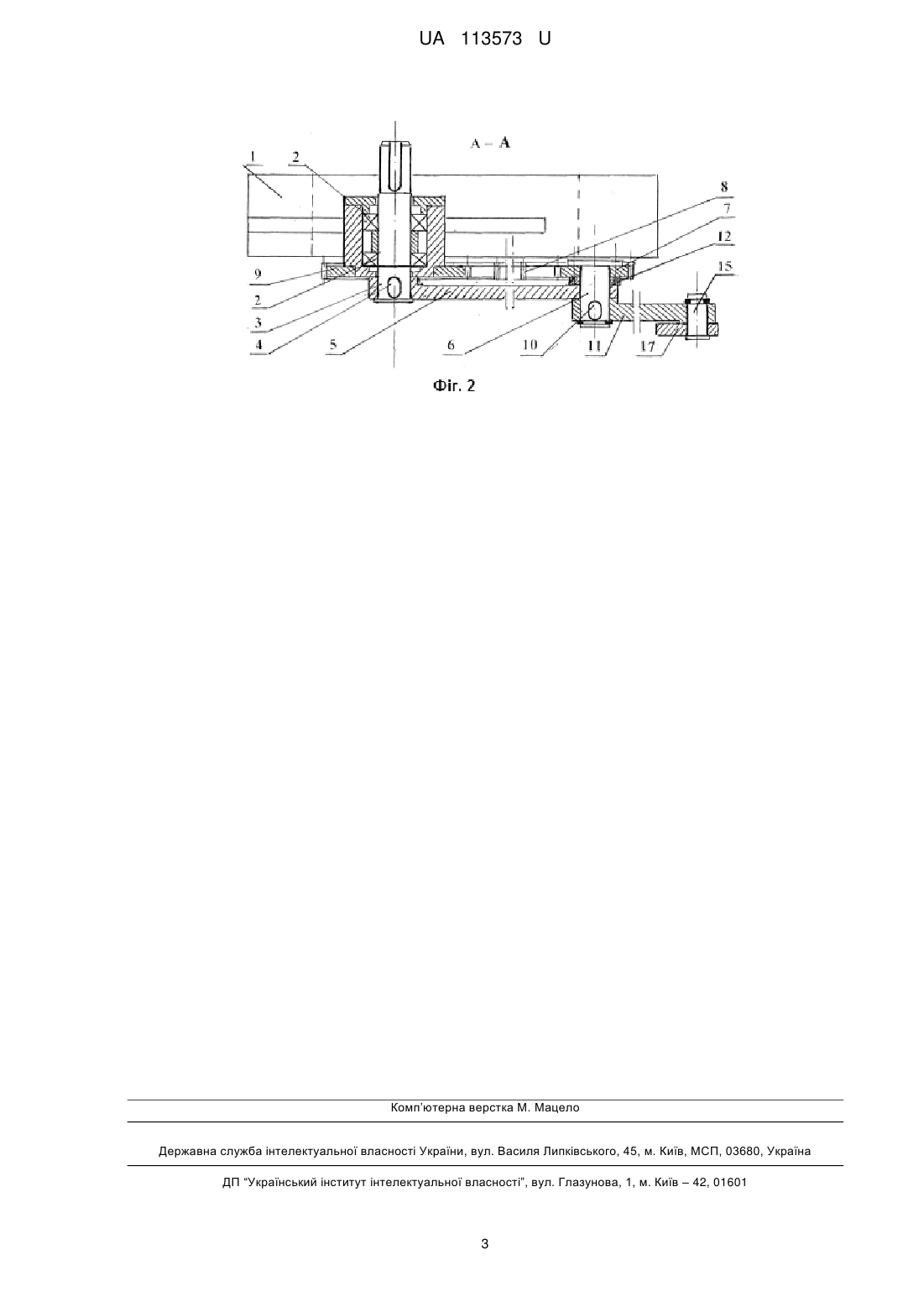
Реферат: UA 113573 U UA 113573 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до загального машинобудування, а саме до розробки конструкцій механізмів для різноманітного руху матеріальних тіл і особливо для прямолінійного їх переміщення. Відомі конструкції для прямолінійного переміщення матеріального тіла [див., наприклад. И.И. Артоболевский. Теория механизмов и машин. - М.: Наука. 19. - С. 26. рис. 14; С. 27. рис. 18,19]. У відомих механізмів присутні нерухомі прямолінійні направляючі, по яким прямолінійно рухаються матеріальні тіла під назвою "повзун". Головним недоліком вказаних механізмів є обов'язкова наявність прямолінійних нерухомих направляючих і повзунів, які рухаються по ним. Це призводить до ускладнення технологічного процесу виготовлення ланок механізму, які утворюють поступальні кінематичні пари з нерухомим направляючим, що збільшує втрати га подолання зусиль тертя і зменшує коефіцієнт корисної дії (ККД) в цілому. Найбільш близьким технічним рішенням є механізм прямолінійного переміщення [див. патент України на корисну модель № 40119, Бюл. № 6, 2009]. Механізм прямолінійного переміщення складається із корпусу, на якому рухливо установлений ведучий вал. На ведучому валу жорстко закріплений кривошип. На кривошипі рухливо установлена вісь, яка виконана як одне ціле з рухомою зірочкою. Рухома зірочка зачіпляється з ланцюгом, який в свою чергу зачіпляється з нерухомою зірочкою. Нерухома зірочка установлена у корпусі співвісною з кривошипом. Передаточне відношення від нерухомої зірочки до рухомої зірочки дорівнює двом. На вісь рухомої зірочки нерухомо посаджено шатун (важіль), довжина якого дорівнює довжині кривошипа. Кінцева точка шатуна рухається по прямій лінії. Даний механізм вибраний прототипом. Прототип і корисна модель, що заявляється, мають такі спільні ознаки: - корпус. - ведучий вал з кривошипом. - рухома зірочка з валиком. - нерухома зірочка, - ланцюгова передача з передаточним відношенням "два". - шатун. Головним недоліком описаною пристрою є те, що неможливо закріпити будь-який інструмент або матеріальне тіло, яким треба рухатися поступально по прямій лінії, тому що тільки одна точка шатуна рухається по прямій лінії. В основу корисної моделі поставлено задачу створити удосконалену конструкцію механізму прямолінійного переміщення, яка забезпечує прямолінійне поступальне переміщення матеріального тіла. Поставлена задача вирішується тим, що у конструкції механізму прямолінійного переміщення матеріального тіла, що містить корпус, ведучий вал з кривошипом, рухому зірочку з валиком, нерухому зірочку, ланцюгову передачу з передаточним відношенням "два" і шатун, згідно з корисною моделлю, на нерухомій зірочці шарнірно з'єднаний важіль з довжиною, яка дорівнює довжині кривошипа, другим кінцем важіль шарнірно з'єднаний з важільцем, довжина якого дорівнює довжині відстані між центрами обертання кривошипа та важеля, а також з додатковим шатуном, довжина якого дорівнює довжині кривошипа, важілець шарнірно сполучений з валиком рухомої зірочки, шатун та додатковий шатун на кінцях їх довжини шарнірно сполучені з матеріальним тілом, а відстань між центрами шарнірних сполучень на матеріальному тілі дорівнює довжині важільця. Таке конструктивне рішення механізму прямолінійного переміщення дозволяє забезпечити прямолінійне переміщення матеріального тіла без будь-яких нерухомих направляючих, що призводить до спрощення технології виготовлення ланок механізму, зниження їх собівартості. збільшення коефіцієнта корисної дії. Конструкція механізму прямолінійного переміщення матеріального тіла зображена на кресленні, де: фіг. 1 вид спереду; фіг. 2 вид в перерізі А-А по фіг. 1. Механізм прямолінійною переміщення матеріального тіла складається з корпусу 1, в якому в підшипниках кочення 2 установлений ведучий вал 3. З ведучим валом 3 за допомогою шпонки 4 з'єднаний кривошип 5. Кривошип 5 шарнірно з'єднаний з валиком 6. З валиком 6 жорстко з'єднана зірочка 7, яка зачеплена з ланцюгом 8. Ланцюг 8 в свою чергу зачеплений з нерухомою зірочкою 9, яка співвісна з кривошипом 5 і жорстко закріплена у корпусі 1. Передаточне відношення від нерухомої зірочки 9 до рухомої зірочки 7 дорівнює "два". З валиком 6 за допомогою шпонки 10 з'єднаний шатун 11, довжина якого дорівнює довжині кривошипа 5. На 1 UA 113573 U 5 10 15 20 нерухомій зірочці 9 шарнірно сполучений важіль 13, довжина якого дорівнює довжині кривошипа 5. Другим своїм кінцем важіль 13 шарнірно сполучений з важільцем 12 і додатковим шатуном 14. Важілець 12 другим своїм кінцем шарнірно сполучений з валиком 6 зірочки 7. З валиком 6 за допомогою шпонки 10 з'єднаний шатун 11, довжина якого також дорівнює довжині кривошипа 5. Шатун 11 та додатковий шатун 14 на кінцях їх довжини за допомогою циліндричних пальців 15 і 16 сполучені з матеріальним тілом 17. Відстань між центрами циліндричних пальців 15 і 16 дорівнює довжині важільця 12. Механізм прямолінійного переміщення матеріального тіла працює наступним чином. Обертання від зовнішнього джерела передається до ведучого вала 3, звідки через шпонку 4 до кривошипа 5. Від кривошипа 5 через важілець12 рух передається важелю 13. Через те, що центри шарнірних з'єднань кривошипа 5 важеля 13 з нерухомою зірочкою та важільцем 12 складають шарнірний паралелограм, важілець 12 рухається поступально по окружності, радіус якої дорівнює довжині кривошипа 5. При обертанні кривошипа 5 ланцюг 8 також рухається і обкочується навколо нерухомої зірочки 9. Від ланцюга 8 рух передається рухомій зірочці 7 і валику 6. Від валика 6 через шпонку 10 рух передасться шатуну 11. Одночасно від важільця 12 рух передається додатковому шатуну 14. Від шатуна 11 і додаткового шатуна 14 через циліндричні пальці 15 та 16 рух передається матеріальному тілу 17. Внаслідок того, що центр циліндричного пальця 15 рухається по прямій лінії, яка проходить через центр обертання кривошипа 5 і центри шарнірних з'єднань 11-17, 14-17, 12-11, 12-14 також складають шарнірний паралелограм, то центр циліндричною пальця 16 також рухається по прямій лінії. Таким чином дві точки матеріального тіла 17 рухаються по прямій лінії, а тому матеріальне тіло 17 також рухається по прямій лінії без використання нерухомих направляючих. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 25 30 Механізм прямолінійного переміщення матеріального тіла, який містить корпус, ведучий вал з кривошипом, рухому зірочку з валиком, нерухому зірочку, ланцюгову передачу з передаточним відношенням "два" і шатун, який відрізняється тим, що на нерухомій зірочці шарнірно з'єднаний важіль з довжиною, яка дорівнює довжині кривошипа, другим кінцем важіль шарнірно з'єднаний з важільцем, довжина якого дорівнює довжині відстані між центрами обертання кривошипа та важеля, а також з додатковим шатуном, довжина якого дорівнює довжині кривошипа, важілець шарнірно сполучений з валиком рухомої зірочки, шатун та додатковий шатун на кінцях їх довжини шарнірно сполучені з матеріальним тілом, а відстань між центрами шарнірних сполучень на матеріальному тілі дорівнює довжині важільця. 2 UA 113573 U Комп’ютерна верстка М. Мацело Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
МПК / Мітки
МПК: F16H 21/00
Мітки: тіла, матеріального, прямолінійного, переміщення, механізм
Код посилання
<a href="https://ua.patents.su/5-113573-mekhanizm-pryamolinijjnogo-peremishhennya-materialnogo-tila.html" target="_blank" rel="follow" title="База патентів України">Механізм прямолінійного переміщення матеріального тіла</a>
Механізм прямолінійного переміщення
Номер патенту: 40119
Опубліковано: 25.03.2009
Автори: Амбарцумянц Роберт Вачаганович, Амбарцумянц Карен Робертович
МПК: F16H 21/00
Мітки: прямолінійного, переміщення, механізм
Формула / Реферат:
Механізм прямолінійного переміщення, який складається з корпусу, ведучого вала, кривошипа, шести рухомих важелів, який відрізняється тим, що з кривошипом, закріпленим на ведучому валу, з'єднано шарнірно другий важіль, довжина якого рівна довжині кривошипа та рівна одній четвертій частині потрібної довжини прямолінійного переміщення точки, з корпусом механізму співвісно з ведучим валом нерухомо закріплена зірочка, яка зачіпляється з ланцюгом,...
Механізм прямолінійного переміщення точки
Номер патенту: 104104
Опубліковано: 12.01.2016
Автори: Амбарцумянц Роберт Вачаганович, Амбарцумянц Рубен Робертович
МПК: F16H 21/00, F16H 21/18
Мітки: точки, механізм, прямолінійного, переміщення
Формула / Реферат:
Механізм прямолінійного переміщення точки, який складається з корпусу, ведучого вала, кривошипа, шести рухомих важелів, який відрізняється тим, що кривошип виконаний з двох важелів, жорстко закріплених між собою під кутом більше нуля градусів, але менше 180° і з'єднаний шарнірно з веденим кривошипом, аналогічним ведучому, шатунами однакової довжини, рівною довжині відстані між центрами обертання ведучого і веденого кривошипів, з ведучим...
Мультиплікатор прямолінійного переміщення
Номер патенту: 49420
Опубліковано: 26.04.2010
Автори: Амбарцумянц Роберт Вачаганович, Амбарцумянц Карен Робертович
МПК: F16H 21/00
Мітки: переміщення, мультиплікатор, прямолінійного
Формула / Реферат:
1. Мультиплікатор прямолінійного переміщення, що містить корпус, з яким з'єднаний вхідний п'ятиланковий механізм та багаторазові п'ятиланкові ведені механізми, який відрізняється тим, що вихідний п'ятиланковий механізм замінений вхідним валом, встановленим рухомо у корпусі, а з корпусом, співвісно з вхідним валом, жорстко закріплена зірочка, з вхідним валом жорстко закріплено перший важіль, у другому кінці першого важеля рухомо встановлено...
Гідравлічний механізм лінійного переміщення фізичного тіла

Номер патенту: 31442
Опубліковано: 15.12.2000
Автор: Романіка Костянтин Васильович
МПК: B23B 3/00
Мітки: тіла, переміщення, фізичного, механізм, лінійного, гідравлічний
Текст:
...напряму його пере ( міщений [ Поставлена мета досягається тим, ш вказаний клапон вике* 4 наний з можливість^ обертання навкруги своєї ©сі І має по періметру необмежену КІЛЬКІСТЬ отворів різного діаметру , рри цьоіцу на одНІй осі з клапоном установлений лімб розділений на КІЛЬКІСТЬ відрізків, що відповідають КІЛЬКОСТІ отворів в клалоні, а пдя зміни напряму руху супорта, паралельно з валиком, що звязаний з вагою, установлений допоміжний...
Гвинтовий конвеєр прямолінійного переміщення заготовок
Номер патенту: 11979
Опубліковано: 16.01.2006
Автори: Левенець Володимир Богданович, Гевко Іван Богданович, Гевко Ігор Богданович
МПК: B65G 33/16
Мітки: гвинтовий, заготовок, прямолінійного, конвеєр, переміщення
Формула / Реферат:
Гвинтовий конвеєр прямолінійного переміщення заготовок, що містить раму, кожух, гвинтовий робочий орган з центральним валом, привід, механізми підтримки, завантаження, вивантаження, який відрізняється тим, що гвинтовий робочий орган виконано у вигляді двох або більше гвинтових дротяних елементів з мінімальним і максимальним радіусом, які рівномірно по довжині і жорстко з'єднані з радіальними перемичками з різним поперечним перерізом, якими...
Попередній патент: Пристрій для пресування пластикової тари
Наступний патент: Спосіб прогнозування перебігу та оцінки ризику летального кінця гострого коронарного синдрому
Випадковий патент: Фільтруючий елемент фільтра очистки газоподібних і рідких продуктів