Рульовий привід керованої аеродинамічної поверхні літального апарата
Номер патенту: 117705
Опубліковано: 10.07.2017

Формула / Реферат
Рульовий привід керованої аеродинамічної поверхні літального апарата, що має рульову машину з керуючою ланкою та вихідним валом, датчик кута, датчик кутової швидкості, датчик кутового прискорення повороту керованої аеродинамічної поверхні, підсумовуючий підсилювач та підсилювач потужності, ведений ролик, ведучий ролик, вал, тросову проводку, зубчатий сектор, шестірню, керуючу аеродинамічну поверхню, яка механічним зв'язком з'єднана з вихідним валом рульової машини, при цьому перший вхід підсумовуючого підсилювача з'єднаний з виходом блока формування вхідного сигналу рульового приводу, другий вхід підсумовуючого підсилювача з'єднаний з виходом датчика кута повороту керованої аеродинамічної поверхні відносно корпусу літального апарата, третій вхід підсумовуючого підсилювача з'єднаний з виходом датчика кутової швидкості, четвертий вхід підсумовуючого підсилювача з'єднаний з виходом датчика кутового прискорення, вихід підсумовуючого підсилювача з'єднаний зі входом підсилювача потужності, а вихід підсилювача потужності з'єднаний зі входом керуючої ланки рульової машини та електромагнітну муфту, яка механічним зв'язком поєднана з веденим роликом з одного боку та ведучим роликом з іншого, який відрізняється тим, що має датчик зворотного зв'язку, який механічним зв'язком поєднаний з рульовою машиною з одного боку та шестірнею з іншого.
Текст
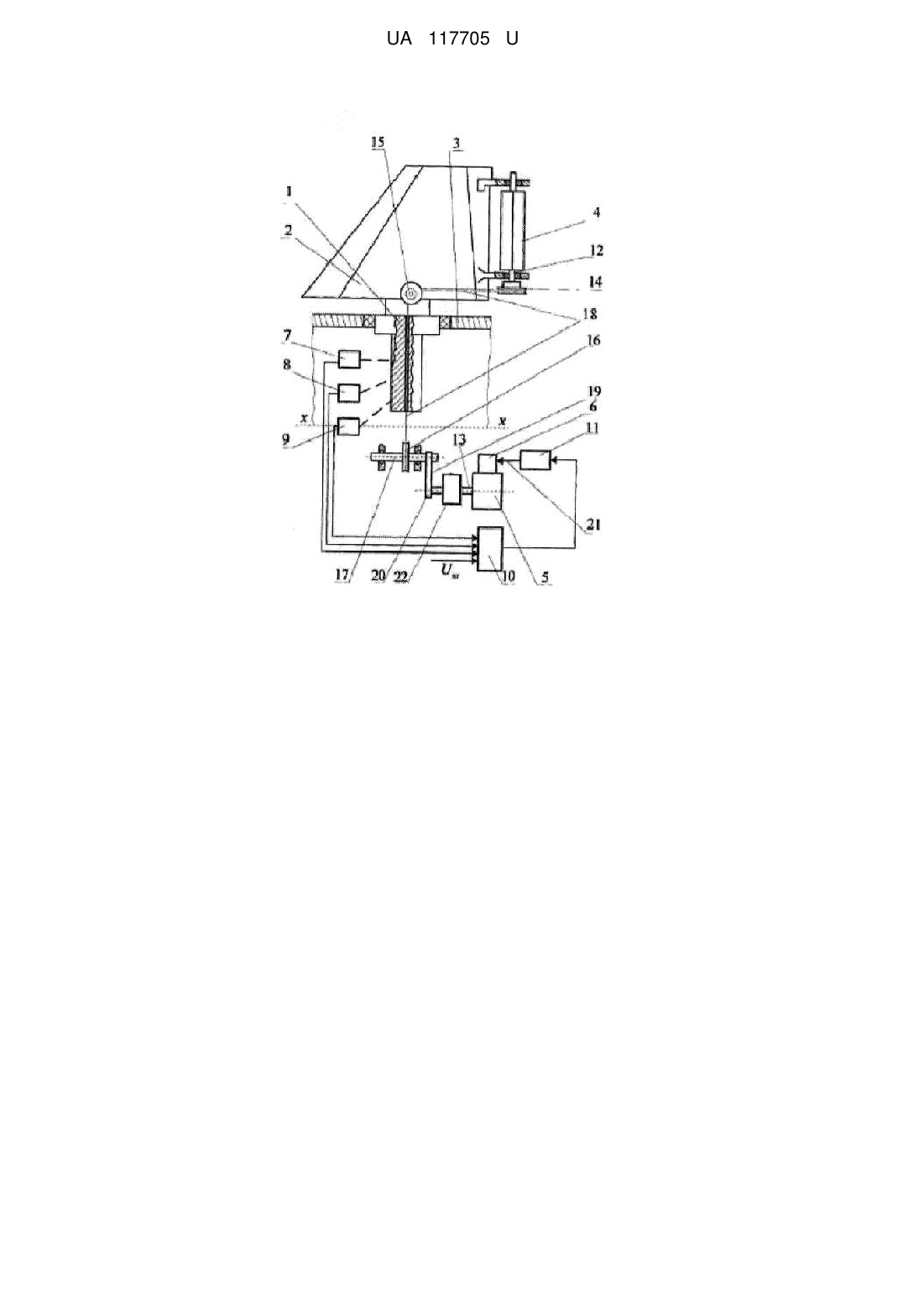
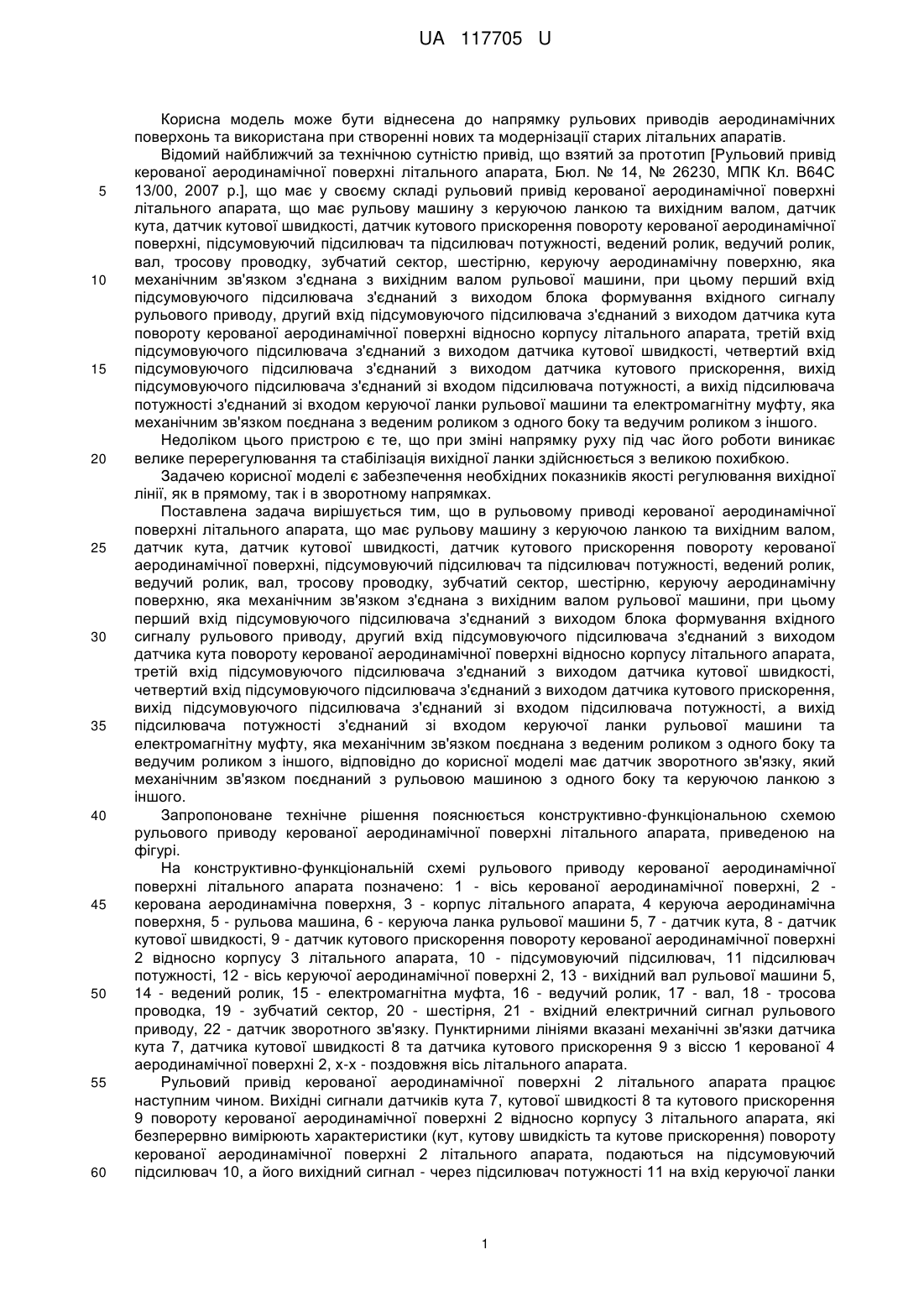
Реферат: UA 117705 U UA 117705 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель може бути віднесена до напрямку рульових приводів аеродинамічних поверхонь та використана при створенні нових та модернізації старих літальних апаратів. Відомий найближчий за технічною сутністю привід, що взятий за прототип [Рульовий привід керованої аеродинамічної поверхні літального апарата, Бюл. № 14, № 26230, МПК Кл. В64С 13/00, 2007 р.], що має у своєму складі рульовий привід керованої аеродинамічної поверхні літального апарата, що має рульову машину з керуючою ланкою та вихідним валом, датчик кута, датчик кутової швидкості, датчик кутового прискорення повороту керованої аеродинамічної поверхні, підсумовуючий підсилювач та підсилювач потужності, ведений ролик, ведучий ролик, вал, тросову проводку, зубчатий сектор, шестірню, керуючу аеродинамічну поверхню, яка механічним зв'язком з'єднана з вихідним валом рульової машини, при цьому перший вхід підсумовуючого підсилювача з'єднаний з виходом блока формування вхідного сигналу рульового приводу, другий вхід підсумовуючого підсилювача з'єднаний з виходом датчика кута повороту керованої аеродинамічної поверхні відносно корпусу літального апарата, третій вхід підсумовуючого підсилювача з'єднаний з виходом датчика кутової швидкості, четвертий вхід підсумовуючого підсилювача з'єднаний з виходом датчика кутового прискорення, вихід підсумовуючого підсилювача з'єднаний зі входом підсилювача потужності, а вихід підсилювача потужності з'єднаний зі входом керуючої ланки рульової машини та електромагнітну муфту, яка механічним зв'язком поєднана з веденим роликом з одного боку та ведучим роликом з іншого. Недоліком цього пристрою є те, що при зміні напрямку руху під час його роботи виникає велике перерегулювання та стабілізація вихідної ланки здійснюється з великою похибкою. Задачею корисної моделі є забезпечення необхідних показників якості регулювання вихідної лінії, як в прямому, так і в зворотному напрямках. Поставлена задача вирішується тим, що в рульовому приводі керованої аеродинамічної поверхні літального апарата, що має рульову машину з керуючою ланкою та вихідним валом, датчик кута, датчик кутової швидкості, датчик кутового прискорення повороту керованої аеродинамічної поверхні, підсумовуючий підсилювач та підсилювач потужності, ведений ролик, ведучий ролик, вал, тросову проводку, зубчатий сектор, шестірню, керуючу аеродинамічну поверхню, яка механічним зв'язком з'єднана з вихідним валом рульової машини, при цьому перший вхід підсумовуючого підсилювача з'єднаний з виходом блока формування вхідного сигналу рульового приводу, другий вхід підсумовуючого підсилювача з'єднаний з виходом датчика кута повороту керованої аеродинамічної поверхні відносно корпусу літального апарата, третій вхід підсумовуючого підсилювача з'єднаний з виходом датчика кутової швидкості, четвертий вхід підсумовуючого підсилювача з'єднаний з виходом датчика кутового прискорення, вихід підсумовуючого підсилювача з'єднаний зі входом підсилювача потужності, а вихід підсилювача потужності з'єднаний зі входом керуючої ланки рульової машини та електромагнітну муфту, яка механічним зв'язком поєднана з веденим роликом з одного боку та ведучим роликом з іншого, відповідно до корисної моделі має датчик зворотного зв'язку, який механічним зв'язком поєднаний з рульовою машиною з одного боку та керуючою ланкою з іншого. Запропоноване технічне рішення пояснюється конструктивно-функціональною схемою рульового приводу керованої аеродинамічної поверхні літального апарата, приведеною на фігурі. На конструктивно-функціональній схемі рульового приводу керованої аеродинамічної поверхні літального апарата позначено: 1 - вісь керованої аеродинамічної поверхні, 2 керована аеродинамічна поверхня, 3 - корпус літального апарата, 4 керуюча аеродинамічна поверхня, 5 - рульова машина, 6 - керуюча ланка рульової машини 5, 7 - датчик кута, 8 - датчик кутової швидкості, 9 - датчик кутового прискорення повороту керованої аеродинамічної поверхні 2 відносно корпусу 3 літального апарата, 10 - підсумовуючий підсилювач, 11 підсилювач потужності, 12 - вісь керуючої аеродинамічної поверхні 2, 13 - вихідний вал рульової машини 5, 14 - ведений ролик, 15 - електромагнітна муфта, 16 - ведучий ролик, 17 - вал, 18 - тросова проводка, 19 - зубчатий сектор, 20 - шестірня, 21 - вхідний електричний сигнал рульового приводу, 22 - датчик зворотного зв'язку. Пунктирними лініями вказані механічні зв'язки датчика кута 7, датчика кутової швидкості 8 та датчика кутового прискорення 9 з віссю 1 керованої 4 аеродинамічної поверхні 2, х-х - поздовжня вісь літального апарата. Рульовий привід керованої аеродинамічної поверхні 2 літального апарата працює наступним чином. Вихідні сигнали датчиків кута 7, кутової швидкості 8 та кутового прискорення 9 повороту керованої аеродинамічної поверхні 2 відносно корпусу 3 літального апарата, які безперервно вимірюють характеристики (кут, кутову швидкість та кутове прискорення) повороту керованої аеродинамічної поверхні 2 літального апарата, подаються на підсумовуючий підсилювач 10, а його вихідний сигнал - через підсилювач потужності 11 на вхід керуючої ланки 1 UA 117705 U 5 10 6 рульової машини 5, яка повертає вихідний вал 13 рульової машини 5. Датчик зворотного зв'язку 22 безпосередньо вимірює швидкість обертання вихідної лінії рульової машини 5, сигнали з якого використовуються для корегування регулювання поверхні. Через шестірню 20 та вихідний вал 13 обертання передається на вал 17 та встановлений на ньому ведучий ролик 16. Тросова проводка 18, що проходить через ведучий ролик 16, електромагнітну муфту 15 та ведений ролик 14, що закріплений на осі 12 керуючої аеродинамічної поверхні 4, передає обертання на вісь 12 керуючої аеродинамічної поверхні, внаслідок чого керуюча аеродинамічна поверхня відхиляється. Це призводить до зменшення кутового прискорення керованої аеродинамічної поверхні 2. Поворот керуючої аеродинамічної поверхні 4 відбуватиметься, доки керована аеродинамічні поверхня 2 не відхилиться на заданий кут. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 15 20 25 Рульовий привід керованої аеродинамічної поверхні літального апарата, що має рульову машину з керуючою ланкою та вихідним валом, датчик кута, датчик кутової швидкості, датчик кутового прискорення повороту керованої аеродинамічної поверхні, підсумовуючий підсилювач та підсилювач потужності, ведений ролик, ведучий ролик, вал, тросову проводку, зубчатий сектор, шестірню, керуючу аеродинамічну поверхню, яка механічним зв'язком з'єднана з вихідним валом рульової машини, при цьому перший вхід підсумовуючого підсилювача з'єднаний з виходом блока формування вхідного сигналу рульового приводу, другий вхід підсумовуючого підсилювача з'єднаний з виходом датчика кута повороту керованої аеродинамічної поверхні відносно корпусу літального апарата, третій вхід підсумовуючого підсилювача з'єднаний з виходом датчика кутової швидкості, четвертий вхід підсумовуючого підсилювача з'єднаний з виходом датчика кутового прискорення, вихід підсумовуючого підсилювача з'єднаний зі входом підсилювача потужності, а вихід підсилювача потужності з'єднаний зі входом керуючої ланки рульової машини та електромагнітну муфту, яка механічним зв'язком поєднана з веденим роликом з одного боку та ведучим роликом з іншого, який відрізняється тим, що має датчик зворотного зв'язку, який механічним зв'язком поєднаний з рульовою машиною з одного боку та шестірнею з іншого. 2 UA 117705 U Комп’ютерна верстка О. Гергіль Міністерство економічного розвитку і торгівлі України, вул. М. Грушевського, 12/2, м. Київ, 01008, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
МПК / Мітки
МПК: B64C 13/00
Мітки: поверхні, літального, аеродинамічної, рульовий, апарата, привід, керованої
Код посилання
<a href="https://ua.patents.su/5-117705-rulovijj-privid-kerovano-aerodinamichno-poverkhni-litalnogo-aparata.html" target="_blank" rel="follow" title="База патентів України">Рульовий привід керованої аеродинамічної поверхні літального апарата</a>
Рульовий привід керованої аеродинамічної поверхні літального апарата
Номер патенту: 26230
Опубліковано: 10.09.2007
Автори: Фірсов Сергій Миколайович, Піщухіна Ольга Олександрівна, Жернокльов Тетяна Володимирівна, Бандура Іван Миколайович
МПК: B64C 13/00
Мітки: привід, поверхні, керованої, літального, апарата, аеродинамічної, рульовий
Формула / Реферат:
Рульовий привід керованої аеродинамічної поверхні літального апарата, що має рульову машину з керуючою ланкою та вихідним валом, датчик кута, датчик кутової швидкості, датчик кутового прискорення повороту керованої аеродинамічної поверхні, підсумовуючий підсилювач та підсилювач потужності, ведений ролик, ведучий ролик, вал, тросову проводку, зубчатий сектор, шестірню, керуючу аеродинамічну поверхню, яка механічним зв'язком з'єднана з вихідним...
Рульовий привід керованої аеродинамічної поверхні літального апарата
Номер патенту: 25834
Опубліковано: 27.08.2007
Автори: Баглєй Олег Вікторович, Бандура Іван Миколайович, Фірсов Сергій Миколайович, Піщухіна Ольга Олександрівна
МПК: B64C 13/00
Мітки: літального, поверхні, аеродинамічної, рульовий, керованої, апарата, привід
Формула / Реферат:
Рульовий привід керованої аеродинамічної поверхні літального апарата, що містить у своєму складі керуючу аеродинамічну поверхню, вісь керованої аеродинамічної поверхні, датчик кута, датчик кутової швидкості і датчик кутового прискорення повороту керованої аеродинамічної поверхні, виходи яких через підсумовуючий підсилювач, підсилювач потужності підключені до керуючої ланки рульової машини, який відрізняється тим, що в нього введені автономна...
Система управління кутом тангажа літального апарата
Номер патенту: 98659
Опубліковано: 12.05.2015
Автори: Карпова Тетяна Володимирівна, Симонов Володимир Федорович
МПК: G05D 1/08, B64C 13/18
Мітки: кутом, управління, тангажа, апарата, літального, система
Формула / Реферат:
Система управління кутом тангажа літального апарата, що містить послідовно з'єднані блок задатчика сигналу тангажа, блок порівняння, інтегратор, перший блок підсилювача, суматор, підсилювач рульової машини, рульову машину, руль висоти, літальний апарат, а також містить другий та третій блоки підсилювачів, зворотний зв'язок, датчик кутової швидкості, датчик кутового положення, при цьому другий вхід блока порівняння з'єднаний з виходом датчика...
Система керування безпілотного літального апарата
Номер патенту: 45231
Опубліковано: 26.10.2009
Автори: Симонов Володимир Федорович, Честних Тимур Володимирович
МПК: G05D 1/03, B64C 13/00
Мітки: літального, система, безпілотного, керування, апарата
Формула / Реферат:
Система керування безпілотного літального апарата, що складається з послідовно з'єднаних задавача, мультиплексора, аналого-цифрового перетворювача, обчислювача, цифро-аналогового перетворювача, сервоприводу, вихід якого під'єднаний до об'єкта керування, а також датчиків кута та кутової швидкості, виходи яких з'єднані з входами відповідно першого та другого нормуючих підсилювачів, виходи яких з'єднані з другим та третім входами мультиплексора,...
Система автоматичного управління висотою польоту безпілотного літального апарата
Номер патенту: 103633
Опубліковано: 25.12.2015
Автори: Симонов Володимир Федорович, Папазян Даніела Завенівна
МПК: G05D 1/04, B64C 13/18
Мітки: літального, апарата, безпілотного, автоматичного, висотою, польоту, управління, система
Формула / Реферат:
Система автоматичного управління висотою польоту безпілотного літального апарата, що містить суматор, перший і другий входи якого з'єднані з виходами вільного гіроскопа тангажа та датчика кутової швидкості, а вихід - з входом підсилювача, вихід якого підключений до входу рульової машини, вихід рульової машини з'єднаний з рулем висоти та через зворотний зв'язок підключений до входу суматора, руль висоти з'єднаний з літальним апаратом, перший...
Попередній патент: Трифазна електрична мережа
Наступний патент: Система управління зенітною ракетою
Випадковий патент: Підкопуючий робочий орган бульбозбиральної машини