Система управління зенітною ракетою
Номер патенту: 117706
Опубліковано: 10.07.2017
Автори: Субота Анатолій Максимович, Бичкова Ірина Володимирівна, Ворошилова Наталія Віталіївна

Формула / Реферат
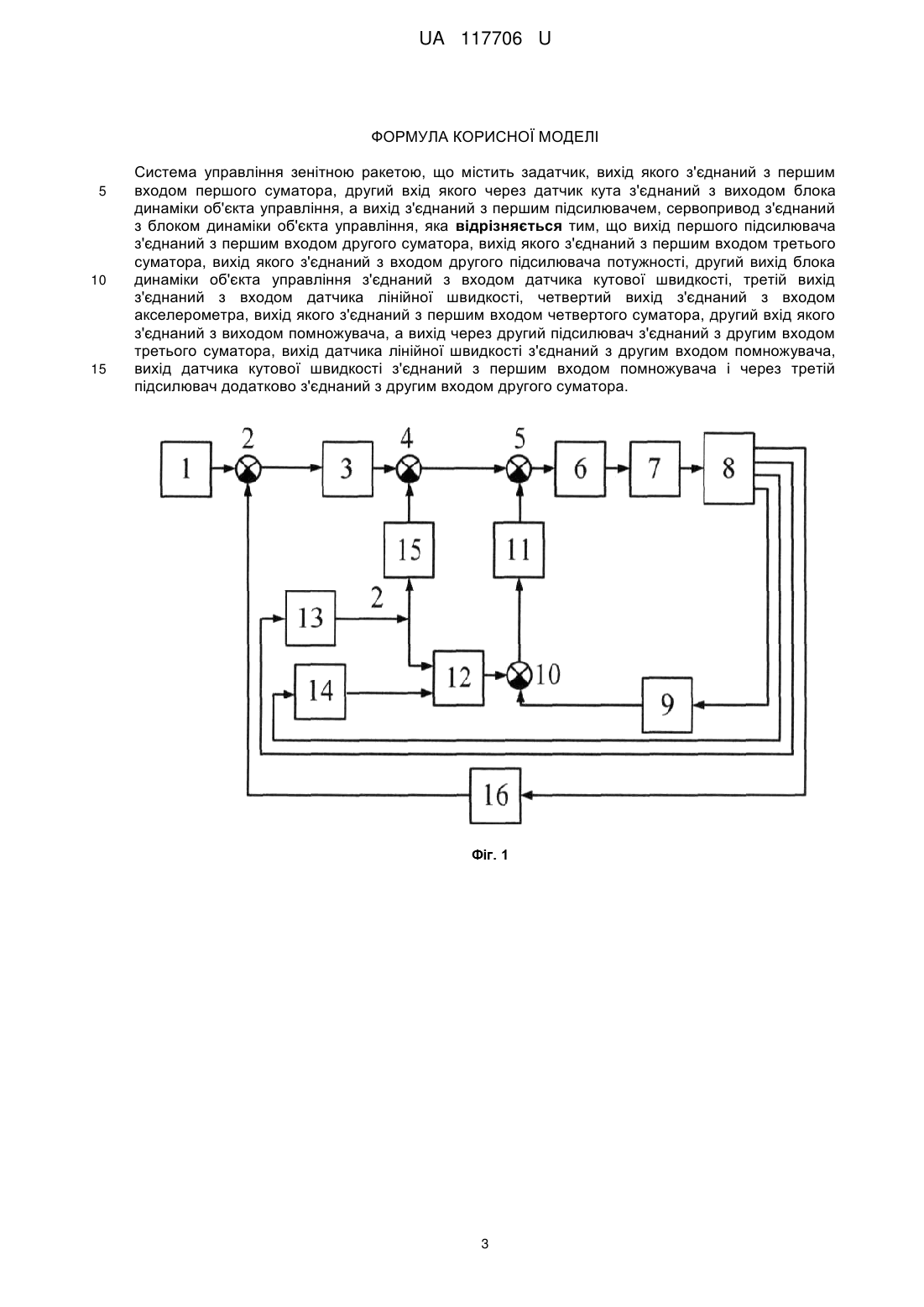
Система управління зенітною ракетою, що містить задатчик, вихід якого з'єднаний з першим входом першого суматора, другий вхід якого через датчик кута з'єднаний з виходом блока динаміки об'єкта управління, а вихід з'єднаний з першим підсилювачем, сервопривод з'єднаний з блоком динаміки об'єкта управління, яка відрізняється тим, що вихід першого підсилювача з'єднаний з першим входом другого суматора, вихід якого з'єднаний з першим входом третього суматора, вихід якого з'єднаний з входом другого підсилювача потужності, другий вихід блока динаміки об'єкта управління з'єднаний з входом датчика кутової швидкості, третій вихід з'єднаний з входом датчика лінійної швидкості, четвертий вихід з'єднаний з входом акселерометра, вихід якого з'єднаний з першим входом четвертого суматора, другий вхід якого з'єднаний з виходом помножувача, а вихід через другий підсилювач з'єднаний з другим входом третього суматора, вихід датчика лінійної швидкості з'єднаний з другим входом помножувача, вихід датчика кутової швидкості з'єднаний з першим входом помножувача і через третій підсилювач додатково з'єднаний з другим входом другого суматора.
Текст
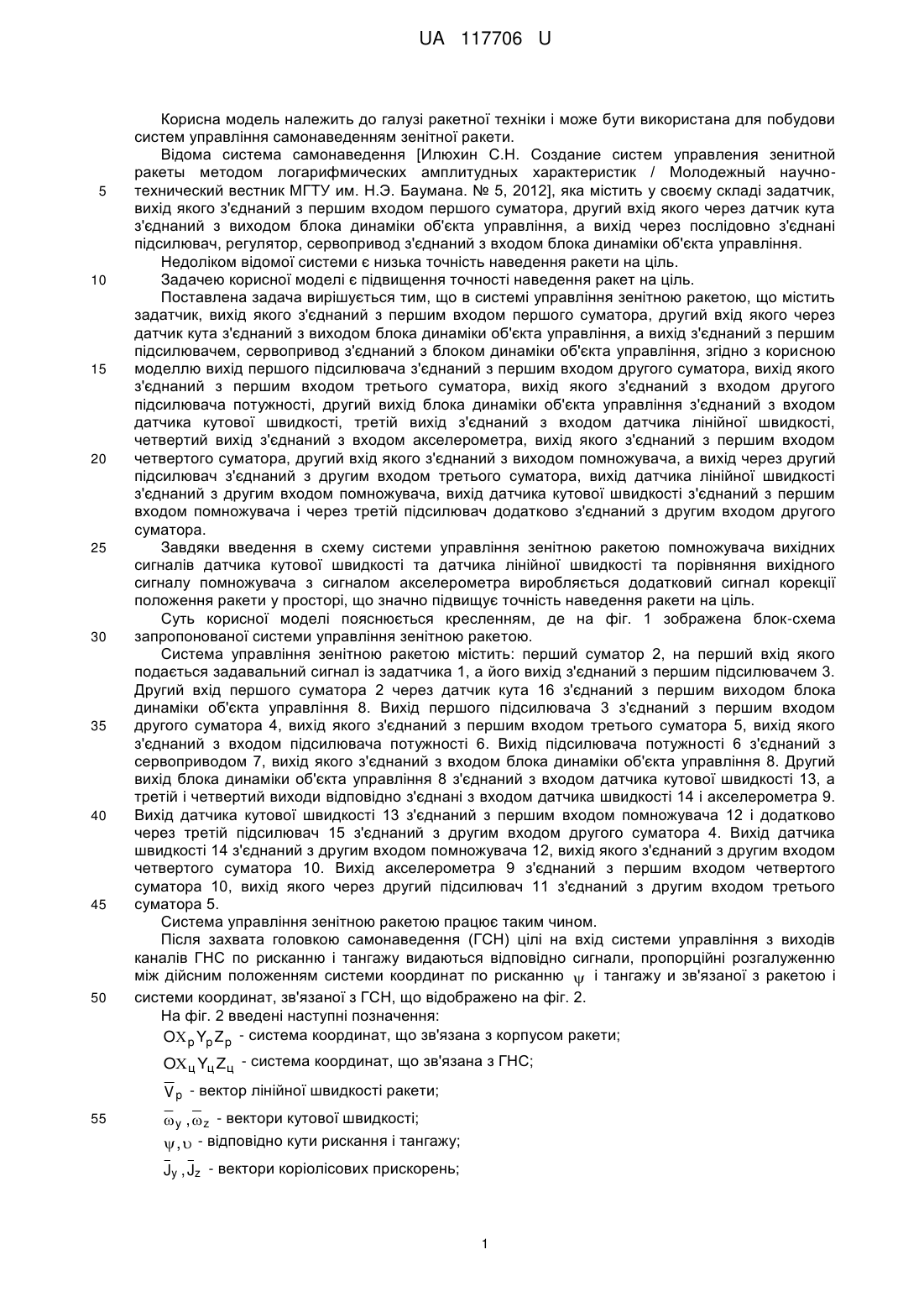
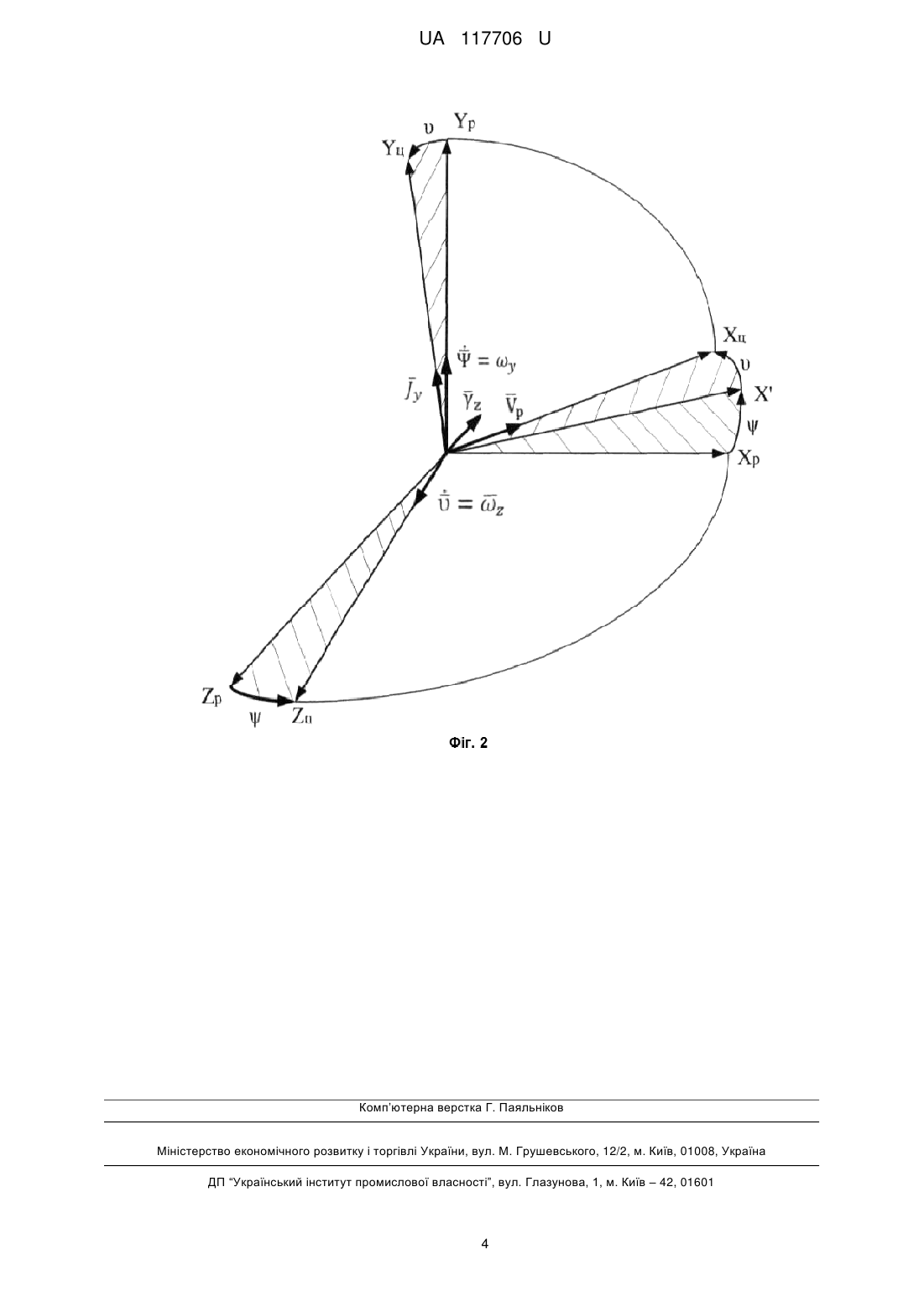
Реферат: Система управління зенітною ракетою містить задатчик, вихід якого з'єднаний з першим входом першого суматора, другий вхід якого через датчик кута з'єднаний з виходом блока динаміки об'єкта управління, а вихід з'єднаний з першим підсилювачем, сервопривод з'єднаний з блоком динаміки об'єкта управління. UA 117706 U (54) СИСТЕМА УПРАВЛІННЯ ЗЕНІТНОЮ РАКЕТОЮ UA 117706 U UA 117706 U 5 10 15 20 25 30 35 40 45 50 Корисна модель належить до галузі ракетної техніки і може бути використана для побудови систем управління самонаведенням зенітної ракети. Відома система самонаведення [Илюхин С.Н. Создание систем управления зенитной ракеты методом логарифмических амплитудных характеристик / Молодежный научнотехнический вестник МГТУ им. Н.Э. Баумана. № 5, 2012], яка містить у своєму складі задатчик, вихід якого з'єднаний з першим входом першого суматора, другий вхід якого через датчик кута з'єднаний з виходом блока динаміки об'єкта управління, а вихід через послідовно з'єднані підсилювач, регулятор, сервопривод з'єднаний з входом блока динаміки об'єкта управління. Недоліком відомої системи є низька точність наведення ракети на ціль. Задачею корисної моделі є підвищення точності наведення ракет на ціль. Поставлена задача вирішується тим, що в системі управління зенітною ракетою, що містить задатчик, вихід якого з'єднаний з першим входом першого суматора, другий вхід якого через датчик кута з'єднаний з виходом блока динаміки об'єкта управління, а вихід з'єднаний з першим підсилювачем, сервопривод з'єднаний з блоком динаміки об'єкта управління, згідно з корисною моделлю вихід першого підсилювача з'єднаний з першим входом другого суматора, вихід якого з'єднаний з першим входом третього суматора, вихід якого з'єднаний з входом другого підсилювача потужності, другий вихід блока динаміки об'єкта управління з'єднаний з входом датчика кутової швидкості, третій вихід з'єднаний з входом датчика лінійної швидкості, четвертий вихід з'єднаний з входом акселерометра, вихід якого з'єднаний з першим входом четвертого суматора, другий вхід якого з'єднаний з виходом помножувача, а вихід через другий підсилювач з'єднаний з другим входом третього суматора, вихід датчика лінійної швидкості з'єднаний з другим входом помножувача, вихід датчика кутової швидкості з'єднаний з першим входом помножувача і через третій підсилювач додатково з'єднаний з другим входом другого суматора. Завдяки введення в схему системи управління зенітною ракетою помножувача вихідних сигналів датчика кутової швидкості та датчика лінійної швидкості та порівняння вихідного сигналу помножувача з сигналом акселерометра виробляється додатковий сигнал корекції положення ракети у просторі, що значно підвищує точність наведення ракети на ціль. Суть корисної моделі пояснюється кресленням, де на фіг. 1 зображена блок-схема запропонованої системи управління зенітною ракетою. Система управління зенітною ракетою містить: перший суматор 2, на перший вхід якого подається задавальний сигнал із задатчика 1, а його вихід з'єднаний з першим підсилювачем 3. Другий вхід першого суматора 2 через датчик кута 16 з'єднаний з першим виходом блока динаміки об'єкта управління 8. Вихід першого підсилювача 3 з'єднаний з першим входом другого суматора 4, вихід якого з'єднаний з першим входом третього суматора 5, вихід якого з'єднаний з входом підсилювача потужності 6. Вихід підсилювача потужності 6 з'єднаний з сервоприводом 7, вихід якого з'єднаний з входом блока динаміки об'єкта управління 8. Другий вихід блока динаміки об'єкта управління 8 з'єднаний з входом датчика кутової швидкості 13, а третій і четвертий виходи відповідно з'єднані з входом датчика швидкості 14 і акселерометра 9. Вихід датчика кутової швидкості 13 з'єднаний з першим входом помножувача 12 і додатково через третій підсилювач 15 з'єднаний з другим входом другого суматора 4. Вихід датчика швидкості 14 з'єднаний з другим входом помножувача 12, вихід якого з'єднаний з другим входом четвертого суматора 10. Вихід акселерометра 9 з'єднаний з першим входом четвертого суматора 10, вихід якого через другий підсилювач 11 з'єднаний з другим входом третього суматора 5. Система управління зенітною ракетою працює таким чином. Після захвата головкою самонаведення (ГСН) цілі на вхід системи управління з виходів каналів ГНС по рисканню і тангажу видаються відповідно сигнали, пропорційні розгалуженню між дійсним положенням системи координат по рисканню і тангажу и зв'язаної з ракетою і системи координат, зв'язаної з ГСН, що відображено на фіг. 2. На фіг. 2 введені наступні позначення: O p Yp Z p - система координат, що зв'язана з корпусом ракети; O ц Yц Z ц - система координат, що зв'язана з ГНС; V p - вектор лінійної швидкості ракети; 55 y , z - вектори кутової швидкості; , - відповідно кути рискання і тангажу; Jy , Jz - вектори коріолісових прискорень; 1 UA 117706 U 5 10 15 20 Головка самонаведення після захвату цілі виконує роль задатчика кутів рискання і тангажа , на які повинна розвернутися ракета. Оскільки функціонування каналів управління ракетою по рисканню і тангажу аналогічні, то, наприклад, розглянемо тільки процеси управління по рисканню. З виходу за датчика ГНС формується сигнал, пропорційний куту рискання 3 , на який необхідно розвернути ракету. Цей сигнал подається на перший вхід першого суматора 2, на другий вхід якого подається сигнал з виходу датчика кута 16. На виході першого суматора таким чином формується сигнал 3 . (1) Далі цей сигнал підсилюється у першому підсилювачі 3 і подається на перший вхід другого суматора 4, на другий вхід якого подається сигнал з виходу датчика кутової швидкості 13 після його підсилення у третьому підсилювачі 15. Таким чином на виході другого суматора 4 формується сигнал управління згідно з пропорційно-диференціальним законом: i у пр k 3 k , (2) де k , k , - коефіцієнти пропорційності. Якщо не враховувати сигнал з виходу другого підсилювача 11, то сигнал управління згідно з виразом (2) буде поданим через третій суматор 5 на вхід підсилювача потужності 6 і далі на сервопривод 7. За допомогою сервоприводу аеродинамічні рулі відхиляються від вихідного положення і ракета почне обертатися навколо осі OYр (див. фіг. 2) з кутовою швидкістю ωу. Оскільки ракета рухається з лінійною швидкістю Vp, то її корпус починає брати участь одночасно у лінійному і кутовому русі, що призводить до появи коріолісових прискорень вздовж осі OZ ц J zц 2 у V p . (3) В проекціях на осі зв'язаної системи координат O p Yp Z p будемо мати наступне значення коріолісового прискорення: 25 30 J' zp 2 z cos V p cos cos . (4) При порівнянні виразів (3) і (4) видно, що коріолісове прискорення в проекціях на осі зв'язаної системи координат O p Yp Z p мають відмінні значення від коріолісових прискорень, що діють уздовж осей системи координат зв'язаної з головкою самонаведення O ц Yц Z ц . Таким чином, виникає похибка: J z J zц J zp . (5) Аналогічні процеси протікають і при обертанні ракети вздовж осі OZ р з кутовою швидкістю z . Вказані похибки знижують точність наведення ракети на ціль. Якщо вздовж осей ракети OY р і OZр встановити акселерометри лінійних прискорень, то між показаннями акселерометрів Аур 35 (Azp) і потрібними коріолісовими прискореннями Jyц , Jzц можна здобути поправку для корекції системи наведення і підвищити точність наведення ракети на ціль. На фіг. 1 показано формування похибки згідно з виразом (5) за рахунок порівняння в четвертому суматорі 10 вихідних сигналів акселерометра 10 і сигналу з виходу помножувача V 40 12, на виході якого формується дійсне коріолісове прискорення. Для функціонування помножувача 12 на його входи подаються відповідно з датчика кутової швидкості 13 - y або z , а з датчика швидкості 14 - V . Вихідний сигнал з четвертого суматора 10 через другий підсилювач 11 подається на другий вхід третього суматора 5, що забезпечує функціонування системи управління зенітною ракетою згідно з законом: k 1 ц р k 2 Jk p k з , (6) 45 50 де ц , р - відповідно кути ц , р або ц , р ; J k - коріолісове прискорення вздовж осей Yp та Zp; - відповідно до каналу y або z . Таким чином поставлена задача повністю вирішується. Запропонована корисна модель повністю забезпечує підвищення точності системи управління зенітною ракетою при наведенні на ціль в режимі самонаведення. 2 UA 117706 U ФОРМУЛА КОРИСНОЇ МОДЕЛІ 5 10 15 Система управління зенітною ракетою, що містить задатчик, вихід якого з'єднаний з першим входом першого суматора, другий вхід якого через датчик кута з'єднаний з виходом блока динаміки об'єкта управління, а вихід з'єднаний з першим підсилювачем, сервопривод з'єднаний з блоком динаміки об'єкта управління, яка відрізняється тим, що вихід першого підсилювача з'єднаний з першим входом другого суматора, вихід якого з'єднаний з першим входом третього суматора, вихід якого з'єднаний з входом другого підсилювача потужності, другий вихід блока динаміки об'єкта управління з'єднаний з входом датчика кутової швидкості, третій вихід з'єднаний з входом датчика лінійної швидкості, четвертий вихід з'єднаний з входом акселерометра, вихід якого з'єднаний з першим входом четвертого суматора, другий вхід якого з'єднаний з виходом помножувача, а вихід через другий підсилювач з'єднаний з другим входом третього суматора, вихід датчика лінійної швидкості з'єднаний з другим входом помножувача, вихід датчика кутової швидкості з'єднаний з першим входом помножувача і через третій підсилювач додатково з'єднаний з другим входом другого суматора. 3 UA 117706 U Комп’ютерна верстка Г. Паяльніков Міністерство економічного розвитку і торгівлі України, вул. М. Грушевського, 12/2, м. Київ, 01008, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 4
ДивитисяДодаткова інформація
МПК / Мітки
МПК: B64C 19/00
Мітки: управління, зенітною, ракетою, система
Код посилання
<a href="https://ua.patents.su/6-117706-sistema-upravlinnya-zenitnoyu-raketoyu.html" target="_blank" rel="follow" title="База патентів України">Система управління зенітною ракетою</a>
Адаптивна нелінійна система управління
Номер патенту: 44723
Опубліковано: 12.10.2009
Автори: Дибська Ирина Юріївна, Бандура Іван Миколайович, Шпак Ганна Сергіївна
МПК: G05B 13/00
Мітки: управління, система, адаптивна, нелінійна
Формула / Реферат:
Адаптивна нелінійна система управління, що містить перший помножувач, вихід якого з'єднаний через паралельно включені диференціатор, інтегратор і підсилювач з входами першого суматора, а вихід якого підключений до першого входу другого помножувача, вихідний сигнал з цього помножувача сполучений з першим входом другого суматора, вихід якого з'єднаний через регулятор з входом об'єкта управління, вихід якого підключений до першого входу першого...
Адаптивна система управління швидкістю обертання турбіни
Номер патенту: 78888
Опубліковано: 10.04.2013
Автори: Гусєва Альона Олегівна, Симонов Володимир Федорович
МПК: F03B 15/00
Мітки: швидкістю, система, турбіни, обертання, адаптивна, управління
Формула / Реферат:
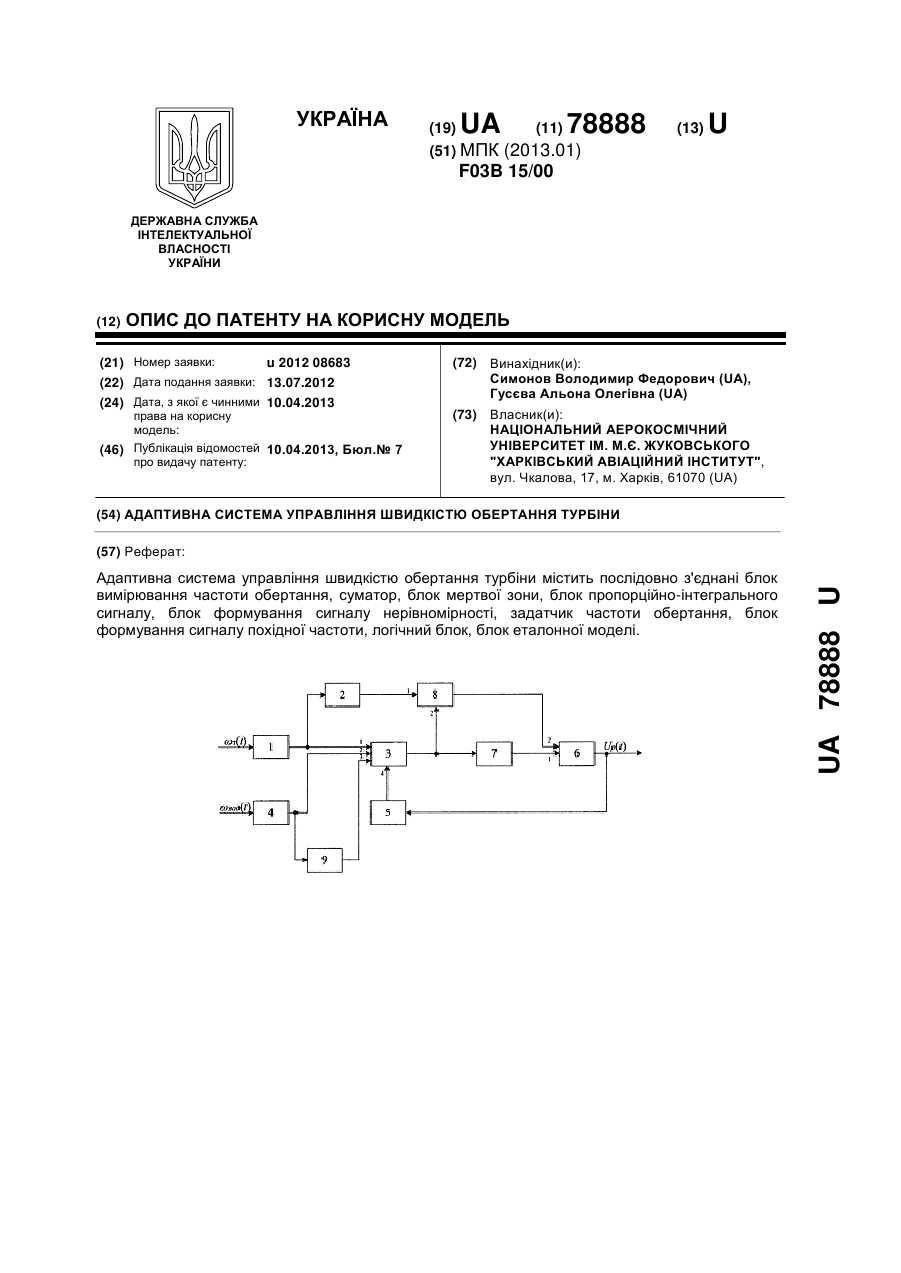
Адаптивна система управління швидкістю обертання турбіни, що містить послідовно з'єднані блок вимірювання частоти обертання, суматор, блок мертвої зони, блок пропорційно-інтегрального сигналу, блок формування сигналу нерівномірності, вихід якого з'єднаний з четвертим входом суматора, а також задатчик частоти обертання, вихід якого з'єднаний з другим входом суматора, блок формування сигналу похідної частоти, вхід якого з'єднаний з виходом...
Система автоматичного управління висотою польоту безпілотного літального апарата
Номер патенту: 103633
Опубліковано: 25.12.2015
Автори: Симонов Володимир Федорович, Папазян Даніела Завенівна
МПК: G05D 1/04, B64C 13/18
Мітки: система, польоту, управління, літального, висотою, апарата, безпілотного, автоматичного
Формула / Реферат:
Система автоматичного управління висотою польоту безпілотного літального апарата, що містить суматор, перший і другий входи якого з'єднані з виходами вільного гіроскопа тангажа та датчика кутової швидкості, а вихід - з входом підсилювача, вихід якого підключений до входу рульової машини, вихід рульової машини з'єднаний з рулем висоти та через зворотний зв'язок підключений до входу суматора, руль висоти з'єднаний з літальним апаратом, перший...
Система управління кутом тангажа літального апарата
Номер патенту: 98659
Опубліковано: 12.05.2015
Автори: Карпова Тетяна Володимирівна, Симонов Володимир Федорович
МПК: G05D 1/08, B64C 13/18
Мітки: система, тангажа, літального, кутом, апарата, управління
Формула / Реферат:
Система управління кутом тангажа літального апарата, що містить послідовно з'єднані блок задатчика сигналу тангажа, блок порівняння, інтегратор, перший блок підсилювача, суматор, підсилювач рульової машини, рульову машину, руль висоти, літальний апарат, а також містить другий та третій блоки підсилювачів, зворотний зв'язок, датчик кутової швидкості, датчик кутового положення, при цьому другий вхід блока порівняння з'єднаний з виходом датчика...
Адаптивна система автоматичного управління висотою польоту безпілотного літального апарата
Номер патенту: 111326
Опубліковано: 10.11.2016
Автори: Симонов Володимир Федорович, Бортник Христина Романівна
МПК: B64C 13/18, G05D 1/04
Мітки: висотою, управління, система, польоту, літального, адаптивна, апарата, безпілотного, автоматичного
Формула / Реферат:
Адаптивна система автоматичного управління висотою польоту безпілотного літального апарата, що містить суматор, перший і другий входи якого з'єднані з виходами вільного гіроскопа тангажа та датчика кутової швидкості, вихід підсилювача підключений до входу рульової машини, вихід рульової машини з'єднаний з рулем висоти та через зворотний зв'язок підключений до шостого входу суматора, руль висоти з'єднаний з літальним апаратом, перший вихід з...
Попередній патент: Рульовий привід керованої аеродинамічної поверхні літального апарата
Наступний патент: Система управління швидкістю літака
Випадковий патент: Контакт бази пожежного сповіщувача