Адаптивна система управління рухом літального апарата у просторі
Номер патенту: 117921
Опубліковано: 10.07.2017
Автори: Немшилов Юрій Олександрович, Шевчук Тетяна Сергіївна, Гольцов Анатолій Сергійович

Формула / Реферат
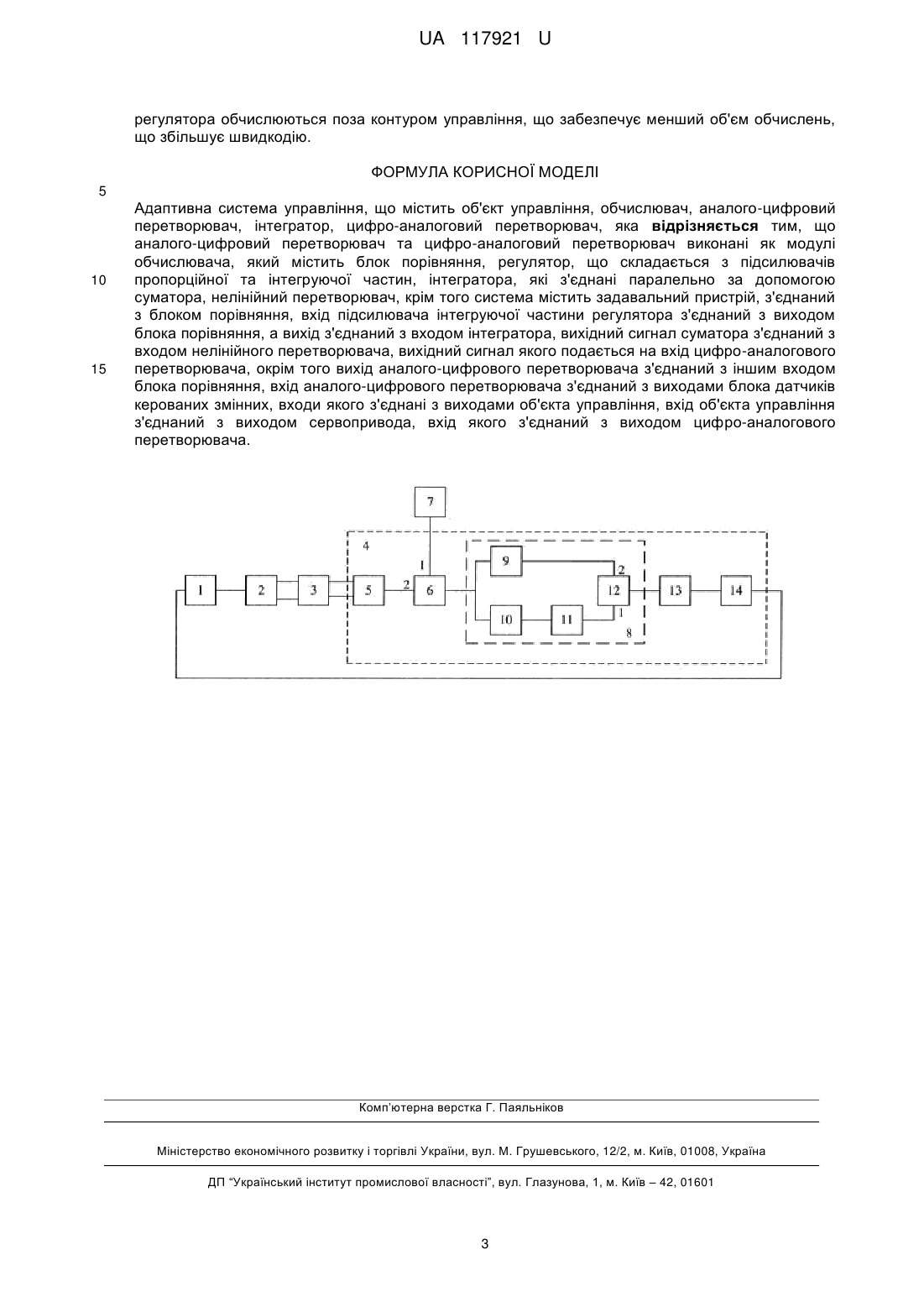
Адаптивна система управління, що містить об'єкт управління, обчислювач, аналого-цифровий перетворювач, інтегратор, цифро-аналоговий перетворювач, яка відрізняється тим, що аналого-цифровий перетворювач та цифро-аналоговий перетворювач виконані як модулі обчислювача, який містить блок порівняння, регулятор, що складається з підсилювачів пропорційної та інтегруючої частин, інтегратора, які з'єднані паралельно за допомогою суматора, нелінійний перетворювач, крім того система містить задавальний пристрій, з'єднаний з блоком порівняння, вхід підсилювача інтегруючої частини регулятора з'єднаний з виходом блока порівняння, а вихід з'єднаний з входом інтегратора, вихідний сигнал суматора з'єднаний з входом нелінійного перетворювача, вихідний сигнал якого подається на вхід цифро-аналогового перетворювача, окрім того вихід аналого-цифрового перетворювача з'єднаний з іншим входом блока порівняння, вхід аналого-цифрового перетворювача з'єднаний з виходами блока датчиків керованих змінних, входи якого з'єднані з виходами об'єкта управління, вхід об'єкта управління з'єднаний з виходом сервопривода, вхід якого з'єднаний з виходом цифро-аналогового перетворювача.
Текст
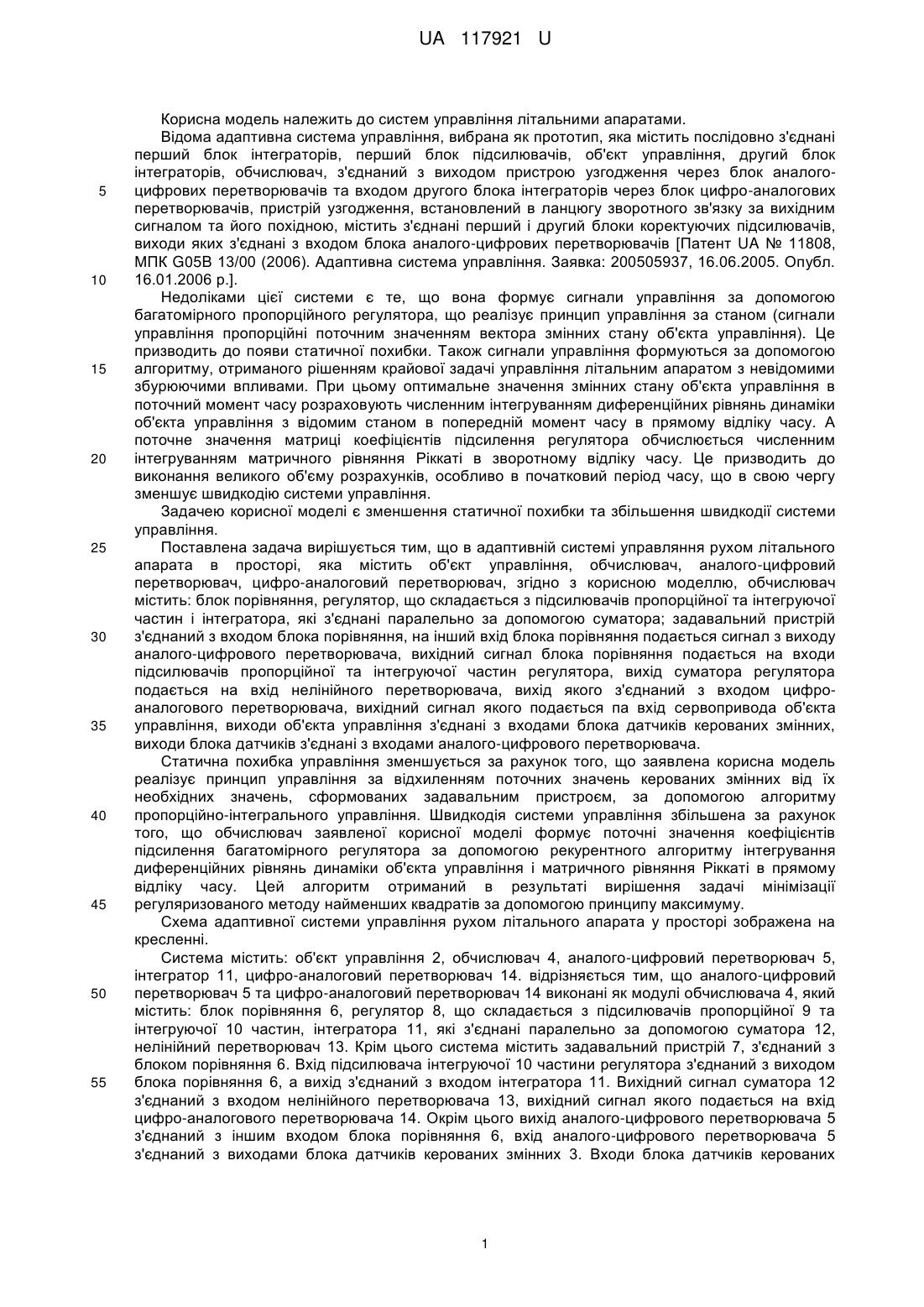
Реферат: Адаптивна система управління має об'єкт управління, обчислювач, аналого-цифровий перетворювач, інтегратор, цифро-аналоговий перетворювач. Аналого-цифровий перетворювач та цифро-аналоговий перетворювач виконані як модулі обчислювача, який містить блок порівняння, регулятор, що складається з підсилювачів пропорційної та інтегруючої частин, інтегратора, які з'єднані паралельно за допомогою суматора, нелінійний перетворювач, крім того система містить задавальний пристрій, з'єднаний з блоком порівняння. Вхід підсилювача інтегруючої частини регулятора з'єднаний з виходом блока порівняння, а вихід з'єднаний з входом інтегратора. Вихідний сигнал суматора з'єднаний з входом нелінійного перетворювача, вихідний сигнал якого подається на вхід цифро-аналогового перетворювача. Вихід аналоговоцифрового перетворювача з'єднаний з іншим входом блока порівняння, вхід аналоговоцифрового перетворювача з'єднаний з виходами блока датчиків керованих змінних, входи якого з'єднані з виходами об'єкта управління. Вхід об'єкта управління з'єднаний з виходом сервопривода, вхід якого з'єднаний з виходом цифро-аналогового перетворювача. UA 117921 U (54) АДАПТИВНА СИСТЕМА УПРАВЛІННЯ РУХОМ ЛІТАЛЬНОГО АПАРАТА У ПРОСТОРІ UA 117921 U UA 117921 U 5 10 15 20 25 30 35 40 45 50 55 Корисна модель належить до систем управління літальними апаратами. Відома адаптивна система управління, вибрана як прототип, яка містить послідовно з'єднані перший блок інтеграторів, перший блок підсилювачів, об'єкт управління, другий блок інтеграторів, обчислювач, з'єднаний з виходом пристрою узгодження через блок аналогоцифрових перетворювачів та входом другого блока інтеграторів через блок цифро-аналогових перетворювачів, пристрій узгодження, встановлений в ланцюгу зворотного зв'язку за вихідним сигналом та його похідною, містить з'єднані перший і другий блоки коректуючих підсилювачів, виходи яких з'єднані з входом блока аналого-цифрових перетворювачів [Патент UA № 11808, МПК G05B 13/00 (2006). Адаптивна система управління. Заявка: 200505937, 16.06.2005. Опубл. 16.01.2006 р.]. Недоліками цієї системи є те, що вона формує сигнали управління за допомогою багатомірного пропорційного регулятора, що реалізує принцип управління за станом (сигнали управління пропорційні поточним значенням вектора змінних стану об'єкта управління). Це призводить до появи статичної похибки. Також сигнали управління формуються за допомогою алгоритму, отриманого рішенням крайової задачі управління літальним апаратом з невідомими збурюючими впливами. При цьому оптимальне значення змінних стану об'єкта управління в поточний момент часу розраховують численним інтегруванням диференційних рівнянь динаміки об'єкта управління з відомим станом в попередній момент часу в прямому відліку часу. А поточне значення матриці коефіцієнтів підсилення регулятора обчислюється численним інтегруванням матричного рівняння Ріккаті в зворотному відліку часу. Це призводить до виконання великого об'єму розрахунків, особливо в початковий період часу, що в свою чергу зменшує швидкодію системи управління. Задачею корисної моделі є зменшення статичної похибки та збільшення швидкодії системи управління. Поставлена задача вирішується тим, що в адаптивній системі управляння рухом літального апарата в просторі, яка містить об'єкт управління, обчислювач, аналого-цифровий перетворювач, цифро-аналоговий перетворювач, згідно з корисною моделлю, обчислювач містить: блок порівняння, регулятор, що складається з підсилювачів пропорційної та інтегруючої частин і інтегратора, які з'єднані паралельно за допомогою суматора; задавальний пристрій з'єднаний з входом блока порівняння, на інший вхід блока порівняння подається сигнал з виходу аналого-цифрового перетворювача, вихідний сигнал блока порівняння подається на входи підсилювачів пропорційної та інтегруючої частин регулятора, вихід суматора регулятора подається на вхід нелінійного перетворювача, вихід якого з'єднаний з входом цифроаналогового перетворювача, вихідний сигнал якого подається па вхід сервопривода об'єкта управління, виходи об'єкта управління з'єднані з входами блока датчиків керованих змінних, виходи блока датчиків з'єднані з входами аналого-цифрового перетворювача. Статична похибка управління зменшується за рахунок того, що заявлена корисна модель реалізує принцип управління за відхиленням поточних значень керованих змінних від їх необхідних значень, сформованих задавальним пристроєм, за допомогою алгоритму пропорційно-інтегрального управління. Швидкодія системи управління збільшена за рахунок того, що обчислювач заявленої корисної моделі формує поточні значення коефіцієнтів підсилення багатомірного регулятора за допомогою рекурентного алгоритму інтегрування диференційних рівнянь динаміки об'єкта управління і матричного рівняння Ріккаті в прямому відліку часу. Цей алгоритм отриманий в результаті вирішення задачі мінімізації регуляризованого методу найменших квадратів за допомогою принципу максимуму. Схема адаптивної системи управління рухом літального апарата у просторі зображена на кресленні. Система містить: об'єкт управління 2, обчислювач 4, аналого-цифровий перетворювач 5, інтегратор 11, цифро-аналоговий перетворювач 14. відрізняється тим, що аналого-цифровий перетворювач 5 та цифро-аналоговий перетворювач 14 виконані як модулі обчислювача 4, який містить: блок порівняння 6, регулятор 8, що складається з підсилювачів пропорційної 9 та інтегруючої 10 частин, інтегратора 11, які з'єднані паралельно за допомогою суматора 12, нелінійний перетворювач 13. Крім цього система містить задавальний пристрій 7, з'єднаний з блоком порівняння 6. Вхід підсилювача інтегруючої 10 частини регулятора з'єднаний з виходом блока порівняння 6, а вихід з'єднаний з входом інтегратора 11. Вихідний сигнал суматора 12 з'єднаний з входом нелінійного перетворювача 13, вихідний сигнал якого подається на вхід цифро-аналогового перетворювача 14. Окрім цього вихід аналого-цифрового перетворювача 5 з'єднаний з іншим входом блока порівняння 6, вхід аналого-цифрового перетворювача 5 з'єднаний з виходами блока датчиків керованих змінних 3. Входи блока датчиків керованих 1 UA 117921 U 5 змінних 3 з'єднані з виходами об'єкта управління 2. Вхід об'єкта управління 2 з'єднаний з виходом сервопривода 1, вхід якого з'єднаний з виходом цифро-аналогового перетворювача 14. Корисна модель реалізує адаптивний алгоритм автоматичного управління наступним чином: динаміка об'єкта управління описується за допомогою моделі у просторі стану, яка містить: - рівняння стану: Xt A Xt B Ut t ; - рівняння спостереження для змінних стану: yt C Xt yt , де X t - вектор змінних стану об'єкта управління; 10 15 20 25 30 Ut - вектор управляючих сигналів; t - вектор неконтрольованих збурюючих впливів; yt - вектор керованих змінних; yt - вектор похибки вимірювання керованих змінних; A , B , C - матриці з відомими елементами. Сигнал управління формується шляхом вирішення задачі мінімізації регуляризованого функціоналу методу найменших квадратів: 1 tk T T 1 IMHK t k yt C Xt D yt C Xt t t dt , 2 0 де t - вектор вхідних сигналів регулятора, апріорну модель якого задають за допомогою диференційних рівнянь. U доп Ut t , де Ut - вектор управляючих впливів; U доп - діагональна матриця допустимих переміщень управляючих впливів за час ; - параметр регуляризації; D - матриця нормуючих множників. Задавальний пристрій 7 формує необхідні значення керованих змінних і подає їх на вхід блока порівняння 6. На інший вхід блока порівняння 6 подаються сигнали з блока датчиків керованих змінних 3. Блок порівняння 6 формує вектор відхилення, який подається на входи підсилювачів пропорційної 9 та інтегруючої 10 частин регулятора. Вихідний сигнал підсилювача інтегруючої частини 10 регулятора подається на інтегратор 11, а вихідний сигнал інтегратора 11 надходить на перший вхід суматора 12. На другий вхід суматора 12 надходить сигнал з підсилювача пропорційної 9 частини регулятора. Коефіцієнти підсилення регулятора 8 отримані шляхом обчислення рівнянь Ріккаті поза контуром управління за результатами льотних випробувань. Вихідний сигнал суматора 12 подається на вхід нелінійного перетворювача 13, який формує необхідні значення кутових переміщень виконуючих органів літального апарата з урахуванням поточних значень швидкісного напору qt по алгоритму: t 35 1 Ut . qt Вихідні сигнали нелінійного перетворювача 13 надходить на вхід цифро-аналогового перетворювача 14, вихід якого з'єднаний з входом сервопривода 1. Управляючі сигнали формуються обчислювачем 4 по алгоритму ПІ - регулювання: Uопт t k п у тр t yt Ut , 40 Ut k i у тр t y t , де Uопт - вектор оптимальних значень сигналу управління; k п та k i - матриці коефіцієнтів підсилення; у тр t - вектор необхідних значень управляючих змінних, сформованих задавальним 45 пристроєм; yt - вектор вихіднихсигналів датчиків. Перша складова правої частини рівняння - вихідний сигнал пропорційної частини регулятора, друга складова - вихідний сигнал інтегруючої частини. Алгоритм ПІ - регулювання реалізує принцип управління за відхиленням та містить інтегруючу частину, тому він забезпечує мінімальну статичну похибку. Коефіцієнти підсилення 2 UA 117921 U регулятора обчислюються поза контуром управління, що забезпечує менший об'єм обчислень, що збільшує швидкодію. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 5 10 15 Адаптивна система управління, що містить об'єкт управління, обчислювач, аналого-цифровий перетворювач, інтегратор, цифро-аналоговий перетворювач, яка відрізняється тим, що аналого-цифровий перетворювач та цифро-аналоговий перетворювач виконані як модулі обчислювача, який містить блок порівняння, регулятор, що складається з підсилювачів пропорційної та інтегруючої частин, інтегратора, які з'єднані паралельно за допомогою суматора, нелінійний перетворювач, крім того система містить задавальний пристрій, з'єднаний з блоком порівняння, вхід підсилювача інтегруючої частини регулятора з'єднаний з виходом блока порівняння, а вихід з'єднаний з входом інтегратора, вихідний сигнал суматора з'єднаний з входом нелінійного перетворювача, вихідний сигнал якого подається на вхід цифро-аналогового перетворювача, окрім того вихід аналого-цифрового перетворювача з'єднаний з іншим входом блока порівняння, вхід аналого-цифрового перетворювача з'єднаний з виходами блока датчиків керованих змінних, входи якого з'єднані з виходами об'єкта управління, вхід об'єкта управління з'єднаний з виходом сервопривода, вхід якого з'єднаний з виходом цифро-аналогового перетворювача. Комп’ютерна верстка Г. Паяльніков Міністерство економічного розвитку і торгівлі України, вул. М. Грушевського, 12/2, м. Київ, 01008, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
МПК / Мітки
МПК: G05B 13/02
Мітки: управління, апарата, рухом, літального, адаптивна, просторі, система
Код посилання
<a href="https://ua.patents.su/5-117921-adaptivna-sistema-upravlinnya-rukhom-litalnogo-aparata-u-prostori.html" target="_blank" rel="follow" title="База патентів України">Адаптивна система управління рухом літального апарата у просторі</a>
Адаптивна система автоматичного управління висотою польоту безпілотного літального апарата
Номер патенту: 111326
Опубліковано: 10.11.2016
Автори: Бортник Христина Романівна, Симонов Володимир Федорович
МПК: B64C 13/18, G05D 1/04
Мітки: польоту, апарата, управління, система, літального, автоматичного, висотою, адаптивна, безпілотного
Формула / Реферат:
Адаптивна система автоматичного управління висотою польоту безпілотного літального апарата, що містить суматор, перший і другий входи якого з'єднані з виходами вільного гіроскопа тангажа та датчика кутової швидкості, вихід підсилювача підключений до входу рульової машини, вихід рульової машини з'єднаний з рулем висоти та через зворотний зв'язок підключений до шостого входу суматора, руль висоти з'єднаний з літальним апаратом, перший вихід з...
Система дистанційного управління рухом безпілотного літального апарата
Номер патенту: 81370
Опубліковано: 25.06.2013
Автори: Тупіцин Микола Федорович, Коваль Олександр Васильович, Матійчик Денис Михайлович
МПК: B64C 19/00, B64C 13/00, B64C 13/16
Мітки: безпілотного, літального, управління, система, апарата, рухом, дистанційного
Формула / Реферат:
Система дистанційного управління рухом безпілотного літального апарата, яка складається з системи автоматичного управління, відеокамери, пристрою управління відеокамери, геореєстратора, аерокартографа, відеоархіву на борту літального апарата, радіолінії та наземної апаратури з радіолінією, апаратури формування команд управління безпілотним літальним апаратом, дисплеєм зовнішнього пілота і відеоархіву зовнішнього пілота, яка відрізняється...
Адаптивна система кутової стабілізації безпілотного літального апарата
Номер патенту: 35826
Опубліковано: 10.10.2008
Автори: Бандура Іван Миколайович, Симонов Володимир Федорович, Амеліна Ірина Вікторівна
МПК: B64C 13/00, G05D 1/03
Мітки: стабілізації, літального, адаптивна, безпілотного, апарата, кутової, система
Формула / Реферат:
Адаптивна система кутової стабілізації безпілотного літального апарата, що містить порівнювальний пристрій, перший суматор, підсилювач, датчик кута, датчик кутової швидкості, обчислювач, до складу якого входять блок вибору нелінійності, перший і другий блоки керування, блок формування керуючих сигналів, другий суматор та перший електронний ключ та фільтр, до складу якого входять компаратор, тригер, елемент затримки, обмежувач рівня сигналу,...
Адаптивна система стабілізації космічного літального апарата

Номер патенту: 46189
Опубліковано: 10.12.2009
Автори: Демидова Вікторія Олександрівна, Бандура Іван Миколайович
МПК: B64G 1/24
Мітки: стабілізації, літального, адаптивна, космічного, апарата, система
Формула / Реферат:
Адаптивна система стабілізації космічного літального апарата, яка містить датчик кута, вихід якого з'єднаний з першим входом блока керування, датчик кутової швидкості, вихід якого з'єднаний з другим входом блока керування, вихід блока керування через блок підсилювачів потужності з'єднаний з релейним виконавчим органом, яка відрізняється тим, що в неї введений блок визначення мінімального керуючого імпульсу, вхід якого з'єднаний з виходом...
Система управління кутом тангажа літального апарата
Номер патенту: 98659
Опубліковано: 12.05.2015
Автори: Симонов Володимир Федорович, Карпова Тетяна Володимирівна
МПК: B64C 13/18, G05D 1/08
Мітки: літального, кутом, система, апарата, тангажа, управління
Формула / Реферат:
Система управління кутом тангажа літального апарата, що містить послідовно з'єднані блок задатчика сигналу тангажа, блок порівняння, інтегратор, перший блок підсилювача, суматор, підсилювач рульової машини, рульову машину, руль висоти, літальний апарат, а також містить другий та третій блоки підсилювачів, зворотний зв'язок, датчик кутової швидкості, датчик кутового положення, при цьому другий вхід блока порівняння з'єднаний з виходом датчика...
Попередній патент: Пристрій для дозованої подачі порошку в ствол детонаційної установки
Випадковий патент: Спосіб виготовлення камер для підрахунку лептоспір