Безконтактний струминний захоплювальний пристрій
Номер патенту: 119819
Опубліковано: 10.10.2017
Автори: Савків Володимир Богданович, Михайлишин Роман Ігорович


Формула / Реферат
Безконтактний струминний захоплювальний пристрій, щo містить корпус, взаємодіючу з об'єктом маніпулювання робочу поверхню, конічну вставку з соплом, яке з'єднане з робочою камерою, а робоча камера через отвір за допомогою різьби для під'єднання повітряної магістралі з'єднана з джерелом тиску, який відрізняється тим, що робоча поверхня захоплювального пристрою оснащена шістьма рівномірно розташованими заглибинами, які прилягають до сопла.
Текст
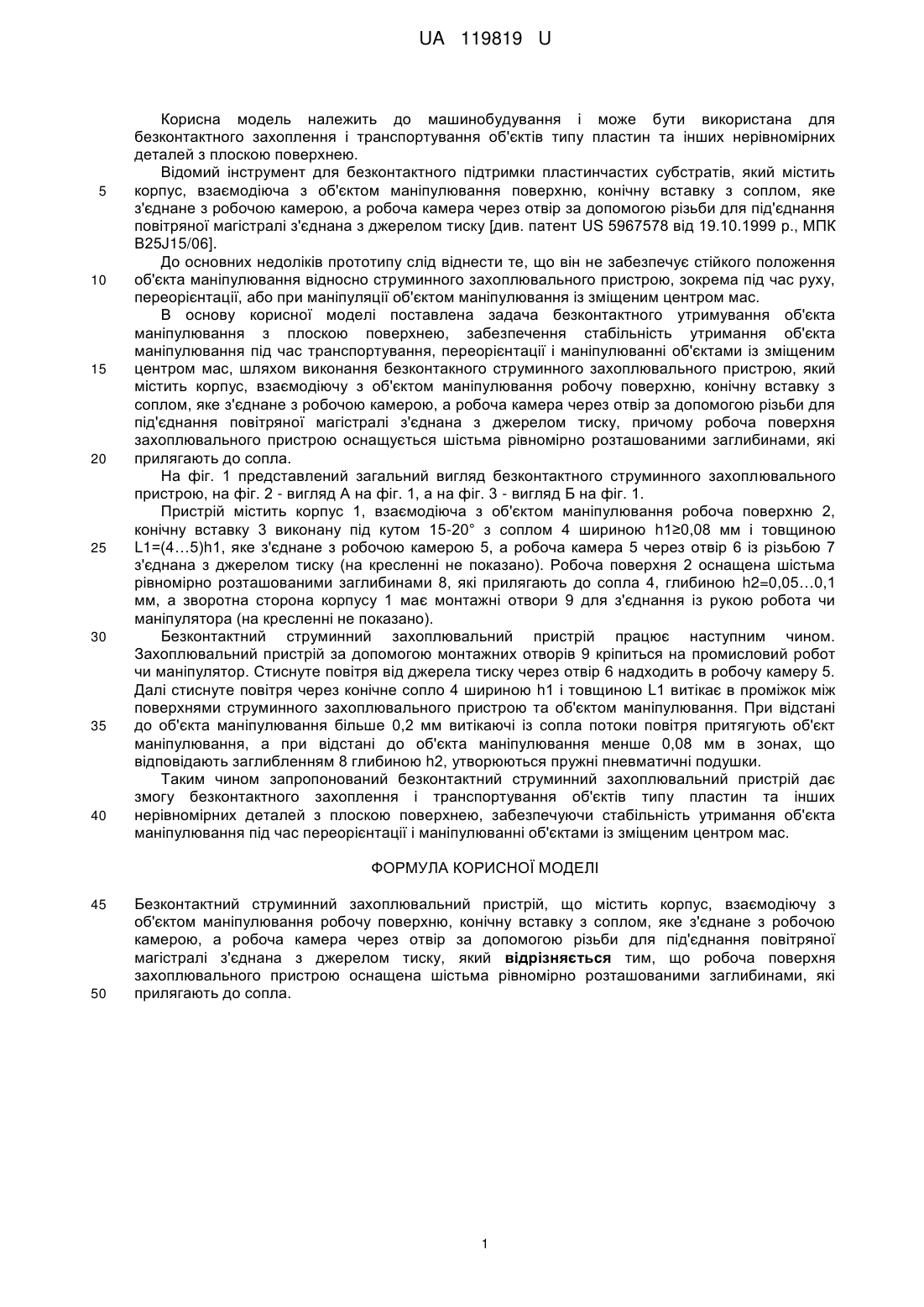
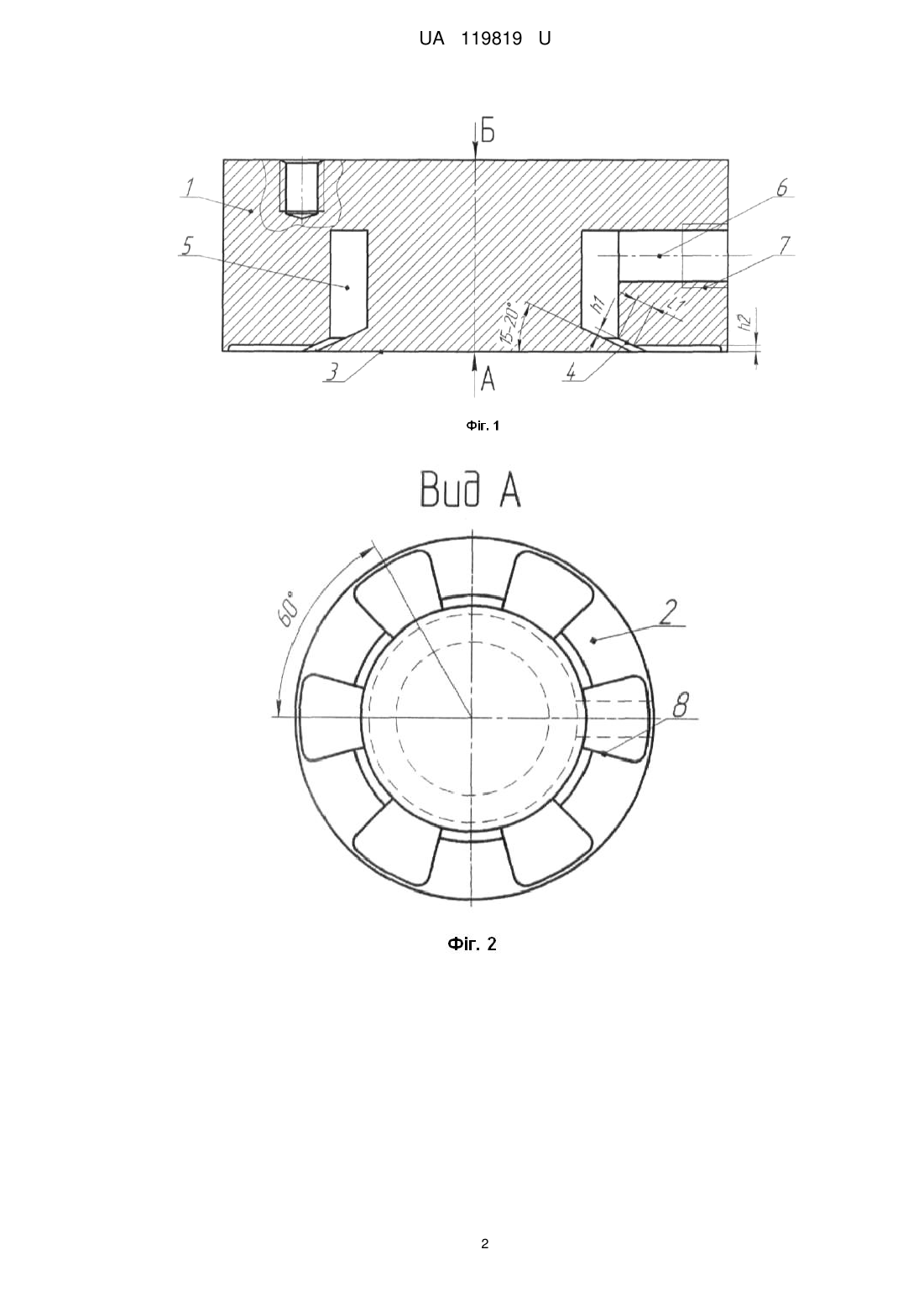
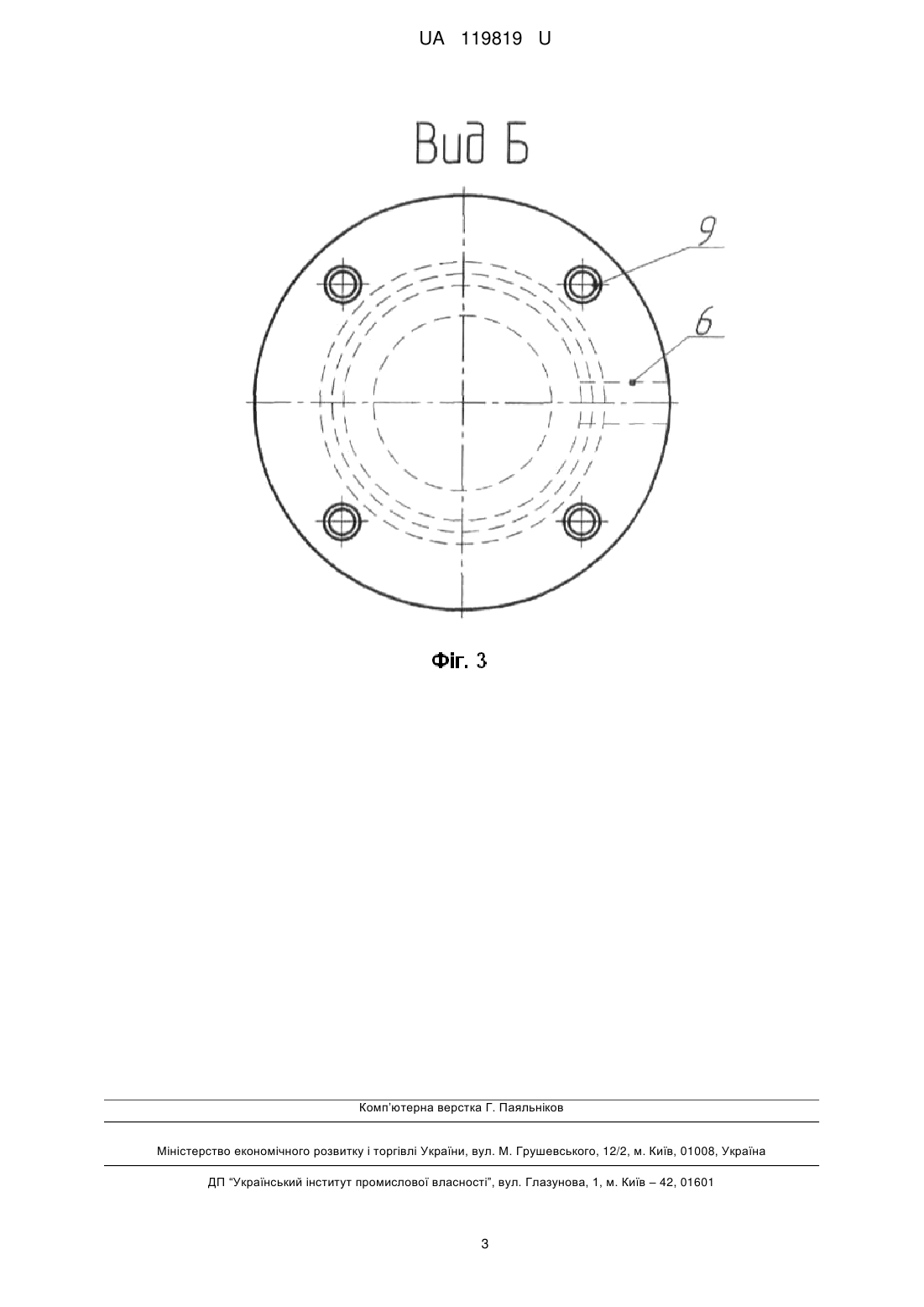
Реферат: UA 119819 U UA 119819 U 5 10 15 20 25 30 35 40 Корисна модель належить до машинобудування і може бути використана для безконтактного захоплення і транспортування об'єктів типу пластин та інших нерівномірних деталей з плоскою поверхнею. Відомий інструмент для безконтактного підтримки пластинчастих субстратів, який містить корпус, взаємодіюча з об'єктом маніпулювання поверхню, конічну вставку з соплом, яке з'єднане з робочою камерою, а робоча камера через отвір за допомогою різьби для під'єднання повітряної магістралі з'єднана з джерелом тиску [див. патент US 5967578 від 19.10.1999 р., МПК В25J15/06]. До основних недоліків прототипу слід віднести те, що він не забезпечує стійкого положення об'єкта маніпулювання відносно струминного захоплювального пристрою, зокрема під час руху, переорієнтації, або при маніпуляції об'єктом маніпулювання із зміщеним центром мас. В основу корисної моделі поставлена задача безконтактного утримування об'єкта маніпулювання з плоскою поверхнею, забезпечення стабільність утримання об'єкта маніпулювання під час транспортування, переорієнтації і маніпулюванні об'єктами із зміщеним центром мас, шляхом виконання безконтакного струминного захоплювального пристрою, який містить корпус, взаємодіючу з об'єктом маніпулювання робочу поверхню, конічну вставку з соплом, яке з'єднане з робочою камерою, а робоча камера через отвір за допомогою різьби для під'єднання повітряної магістралі з'єднана з джерелом тиску, причому робоча поверхня захоплювального пристрою оснащується шістьма рівномірно розташованими заглибинами, які прилягають до сопла. На фіг. 1 представлений загальний вигляд безконтактного струминного захоплювального пристрою, на фіг. 2 - вигляд А на фіг. 1, а на фіг. 3 - вигляд Б на фіг. 1. Пристрій містить корпус 1, взаємодіюча з об'єктом маніпулювання робоча поверхню 2, конічну вставку 3 виконану під кутом 15-20° з соплом 4 шириною h1≥0,08 мм і товщиною L1=(4…5)h1, яке з'єднане з робочою камерою 5, а робоча камера 5 через отвір 6 із різьбою 7 з'єднана з джерелом тиску (на кресленні не показано). Робоча поверхня 2 оснащена шістьма рівномірно розташованими заглибинами 8, які прилягають до сопла 4, глибиною h2=0,05…0,1 мм, а зворотна сторона корпусу 1 має монтажні отвори 9 для з'єднання із рукою робота чи маніпулятора (на кресленні не показано). Безконтактний струминний захоплювальний пристрій працює наступним чином. Захоплювальний пристрій за допомогою монтажних отворів 9 кріпиться на промисловий робот чи маніпулятор. Стиснуте повітря від джерела тиску через отвір 6 надходить в робочу камеру 5. Далі стиснуте повітря через конічне сопло 4 шириною h1 і товщиною L1 витікає в проміжок між поверхнями струминного захоплювального пристрою та об'єктом маніпулювання. При відстані до об'єкта маніпулювання більше 0,2 мм витікаючі із сопла потоки повітря притягують об'єкт маніпулювання, а при відстані до об'єкта маніпулювання менше 0,08 мм в зонах, що відповідають заглибленням 8 глибиною h2, утворюються пружні пневматичні подушки. Таким чином запропонований безконтактний струминний захоплювальний пристрій дає змогу безконтактного захоплення і транспортування об'єктів типу пластин та інших нерівномірних деталей з плоскою поверхнею, забезпечуючи стабільність утримання об'єкта маніпулювання під час переорієнтації і маніпулюванні об'єктами із зміщеним центром мас. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 45 50 Безконтактний струминний захоплювальний пристрій, щo містить корпус, взаємодіючу з об'єктом маніпулювання робочу поверхню, конічну вставку з соплом, яке з'єднане з робочою камерою, а робоча камера через отвір за допомогою різьби для під'єднання повітряної магістралі з'єднана з джерелом тиску, який відрізняється тим, що робоча поверхня захоплювального пристрою оснащена шістьма рівномірно розташованими заглибинами, які прилягають до сопла. 1 UA 119819 U 2 UA 119819 U Комп’ютерна верстка Г. Паяльніков Міністерство економічного розвитку і торгівлі України, вул. М. Грушевського, 12/2, м. Київ, 01008, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
МПК / Мітки
МПК: B25J 15/00
Мітки: пристрій, захоплювальний, безконтактний, струминний
Код посилання
<a href="https://ua.patents.su/5-119819-bezkontaktnijj-struminnijj-zakhoplyuvalnijj-pristrijj.html" target="_blank" rel="follow" title="База патентів України">Безконтактний струминний захоплювальний пристрій</a>
Струминний захоплювальний пристрій
Номер патенту: 119726
Опубліковано: 10.10.2017
Автори: Савків Володимир Богданович, Михайлишин Роман Ігорович
МПК: B25J 15/00
Мітки: струминний, пристрій, захоплювальний
Формула / Реферат:
Струминний захоплювальний пристрій, що містить корпус, взаємодіюча з об'єктом маніпулювання поверхня якого має циліндричну форму, осі об'єкта маніпулювання та корпусу лежать в одній площині і паралельні між собою, їх циліндричні поверхні утворюють зазор, циліндрична поверхня корпусу оснащена поздовжнім пазом, що виконаний посередині взаємодіючої із об'єктом маніпулювання поверхні, а робоча камера через отвір за допомогою штуцера для...
Струменевий захоплювальний пристрій
Номер патенту: 65052
Опубліковано: 25.11.2011
Автори: Бігус Володимир Вікторович, Скочиляс Віктор Володимирович, Савків Володимир Богданович
МПК: B25J 15/00
Мітки: струменевий, пристрій, захоплювальний
Формула / Реферат:
Струменевий захоплювальний пристрій, який містить корпус, взаємодіюча з об'єктом маніпулювання поверхня якого має циліндричну форму, перпендикулярно до її осі симетрично виконано сопло, що з'єднує робочу камеру з атмосферою, причому осі об'єкта маніпулювання і корпусу лежать в одній площині і паралельні між собою, а їх циліндричні поверхні утворюють зазор, причому робоча камера через отвір з'єднана з джерелом тиску, який відрізняється тим,...
Захоплювальний пристрій промислового робота
Номер патенту: 66207
Опубліковано: 26.12.2011
Автори: Мажара Віталій Анатолійович, Годунко Максим Олегович, Павленко Іван Іванович
МПК: B25J 15/00
Мітки: робота, пристрій, захоплювальний, промислового
Формула / Реферат:
Захоплювальний пристрій промислового робота, що складається з пневмоприводу, корпусу та приєднаних до останнього затискних важелів з призматичними затискними елементами, який відрізняється тим, що він містить два рухомі фіксатори та чотири пази для зміни відстані між опорами затискних важелів.
Захоплювальний пристрій

Номер патенту: 64472
Опубліковано: 10.11.2011
Автори: Проць Ярослав Іванович, Фендьо Олена Миколаївна, Бігус Володимир Вікторович, Скочиляс Віктор Володимирович, Савків Володимир Богданович, Савків Галина Володимирівна, Федорів Петро Степанович
МПК: B25J 15/06
Мітки: захоплювальний, пристрій
Формула / Реферат:
Захоплювальний пристрій, що містить порожнистий корпус, в порожнині якого жорстко закріплена конічна тарілка таким чином, що між її зовнішньою циліндричною поверхнею і поверхнею порожнини корпусу утворена циліндрична камера, що сполучена з пневмосистемою, який відрізняється тим, що корпус та конічна тарілка виконані з немагнітного матеріалу, а до зовнішньої бічної циліндричної поверхні корпусу знизу співвісно закріплений металевий диск з...
Струминний двосторонній орієнтуючий пристрій

Номер патенту: 99315
Опубліковано: 25.05.2015
Автори: Бігус Володимир Вікторович, Бігус Віктор Іванович, Савків Володимир Богданович
МПК: B25J 15/06
Мітки: струминний, пристрій, орієнтуючий, двосторонній
Формула / Реферат:
Струминний двосторонній орієнтуючий пристрій, який містить корпус, взаємодіюча з об'єктом маніпулювання поверхня якого циліндричної форми, перпендикулярно до її осі симетрично виконано сопло для з'єднання робочої камери з атмосферою, причому осі об'єкта маніпулювання і корпусу розміщено в одній площині паралельно між собою, а між їх циліндричними поверхнями при роботі буде утворено зазор, причому робочу камеру через отвір з'єднано з джерелом...
Попередній патент: Спосіб установки форсунки газового двигуна внутрішнього згорання для подачі зрідженого палива
Наступний патент: Спосіб утримання підсисних свиноматок
Випадковий патент: Система керування