Захоплювальний пристрій
Номер патенту: 64472
Опубліковано: 10.11.2011
Автори: Фендьо Олена Миколаївна, Савків Галина Володимирівна, Скочиляс Віктор Володимирович, Савків Володимир Богданович, Бігус Володимир Вікторович, Проць Ярослав Іванович, Федорів Петро Степанович

Формула / Реферат
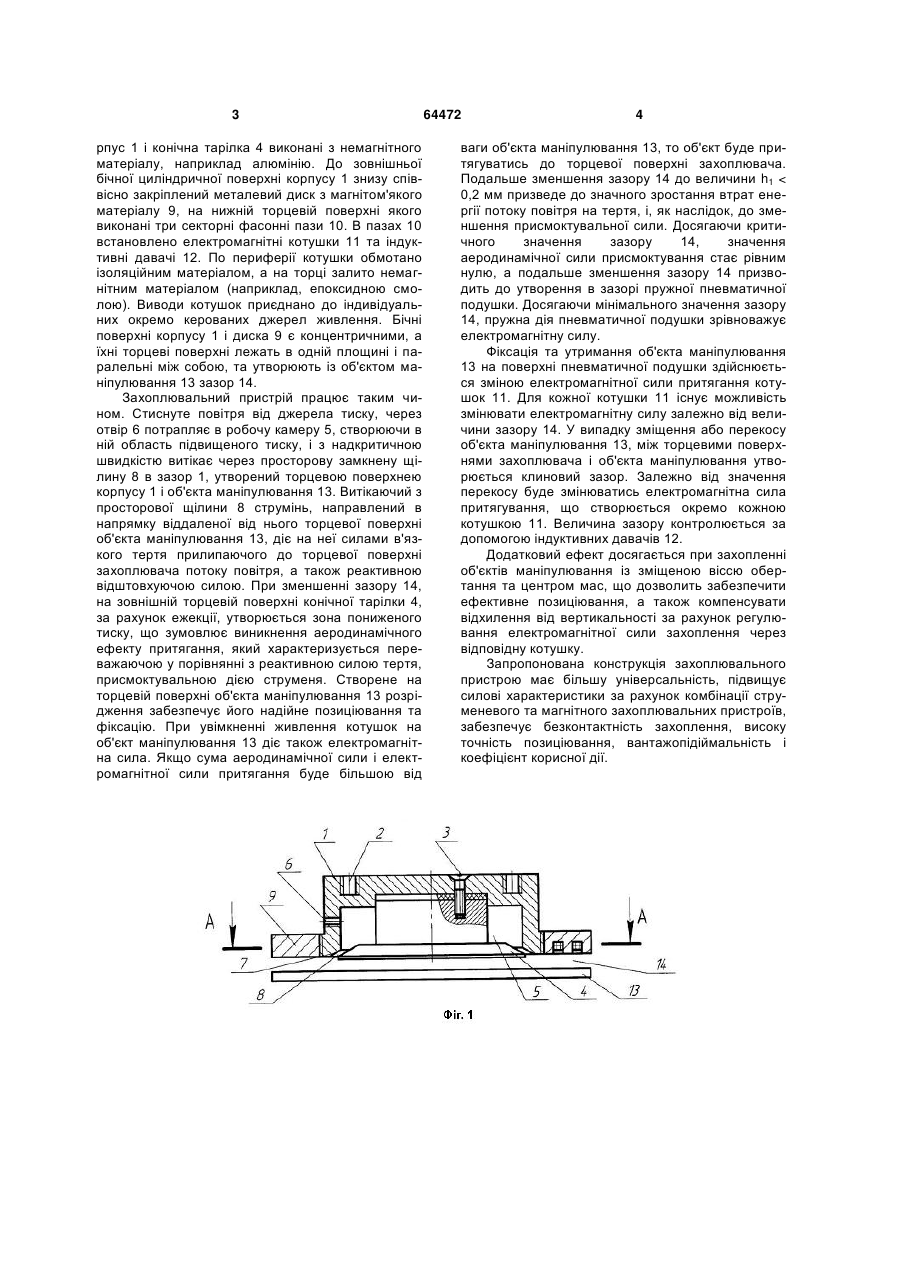
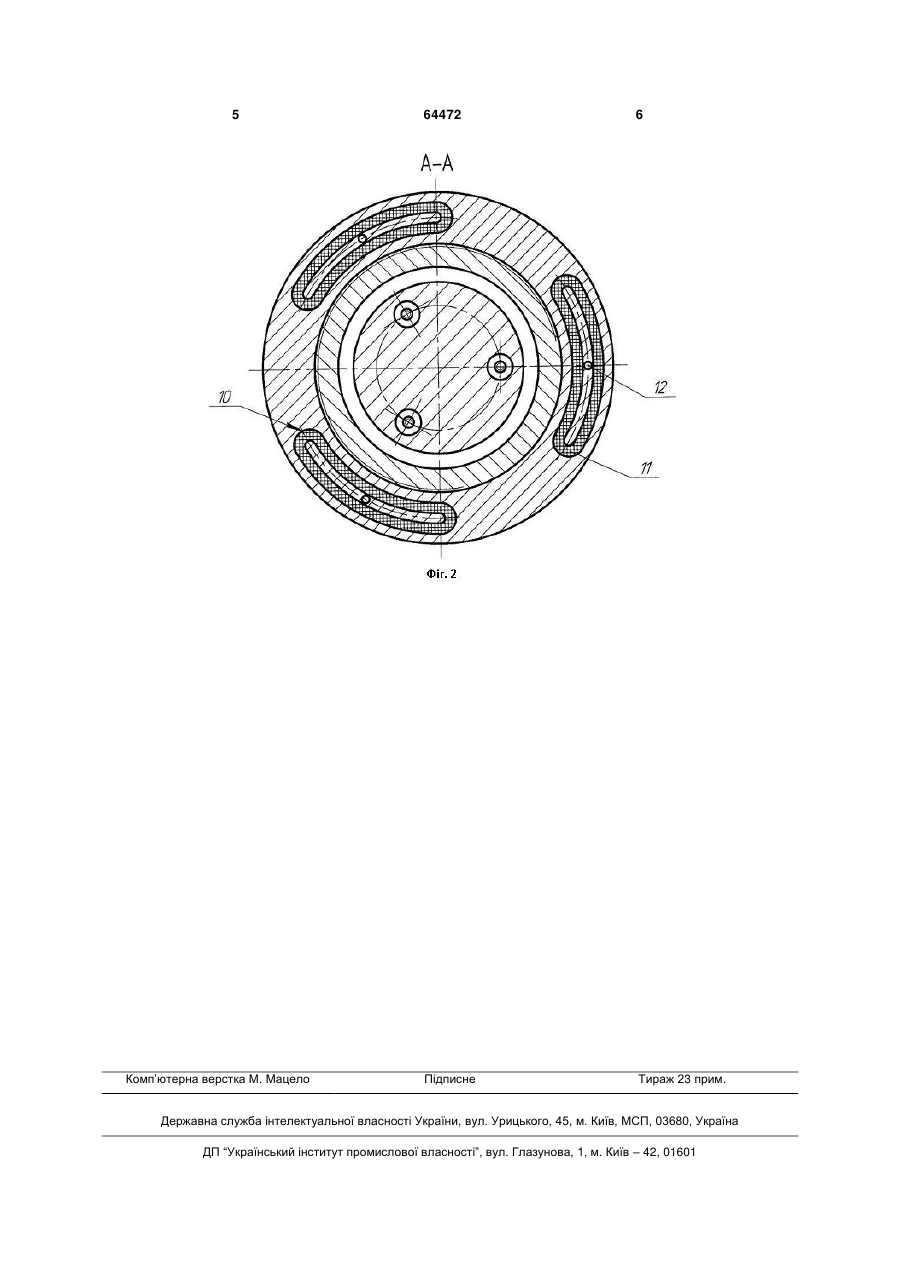
Захоплювальний пристрій, що містить порожнистий корпус, в порожнині якого жорстко закріплена конічна тарілка таким чином, що між її зовнішньою циліндричною поверхнею і поверхнею порожнини корпусу утворена циліндрична камера, що сполучена з пневмосистемою, який відрізняється тим, що корпус та конічна тарілка виконані з немагнітного матеріалу, а до зовнішньої бічної циліндричної поверхні корпусу знизу співвісно закріплений металевий диск з магнітом'якого матеріалу, на нижній торцевій поверхні якого виконані три секторні фасонні пази, у які встановлені електромагнітні котушки та індуктивні давачі, при цьому виводи котушок під'єднані до окремо керованих джерел живлення.
Текст
Захоплювальний пристрій, що містить порожнистий корпус, в порожнині якого жорстко закріп 3 рпус 1 і конічна тарілка 4 виконані з немагнітного матеріалу, наприклад алюмінію. До зовнішньої бічної циліндричної поверхні корпусу 1 знизу співвісно закріплений металевий диск з магнітом'якого матеріалу 9, на нижній торцевій поверхні якого виконані три секторні фасонні пази 10. В пазах 10 встановлено електромагнітні котушки 11 та індуктивні давачі 12. По периферії котушки обмотано ізоляційним матеріалом, а на торці залито немагнітним матеріалом (наприклад, епоксидною смолою). Виводи котушок приєднано до індивідуальних окремо керованих джерел живлення. Бічні поверхні корпусу 1 і диска 9 є концентричними, а їхні торцеві поверхні лежать в одній площині і паралельні між собою, та утворюють із об'єктом маніпулювання 13 зазор 14. Захоплювальний пристрій працює таким чином. Стиснуте повітря від джерела тиску, через отвір 6 потрапляє в робочу камеру 5, створюючи в ній область підвищеного тиску, і з надкритичною швидкістю витікає через просторову замкнену щілину 8 в зазор 1, утворений торцевою поверхнею корпусу 1 і об'єкта маніпулювання 13. Витікаючий з просторової щілини 8 струмінь, направлений в напрямку віддаленої від нього торцевої поверхні об'єкта маніпулювання 13, діє на неї силами в'язкого тертя прилипаючого до торцевої поверхні захоплювача потоку повітря, а також реактивною відштовхуючою силою. При зменшенні зазору 14, на зовнішній торцевій поверхні конічної тарілки 4, за рахунок ежекції, утворюється зона пониженого тиску, що зумовлює виникнення аеродинамічного ефекту притягання, який характеризується переважаючою у порівнянні з реактивною силою тертя, присмоктувальною дією струменя. Створене на торцевій поверхні об'єкта маніпулювання 13 розрідження забезпечує його надійне позиціювання та фіксацію. При увімкненні живлення котушок на об'єкт маніпулювання 13 діє також електромагнітна сила. Якщо сума аеродинамічної сили і електромагнітної сили притягання буде більшою від 64472 4 ваги об'єкта маніпулювання 13, то об'єкт буде притягуватись до торцевої поверхні захоплювача. Подальше зменшення зазору 14 до величини h1 < 0,2 мм призведе до значного зростання втрат енергії потоку повітря на тертя, і, як наслідок, до зменшення присмоктувальної сили. Досягаючи критичного значення зазору 14, значення аеродинамічної сили присмоктування стає рівним нулю, а подальше зменшення зазору 14 призводить до утворення в зазорі пружної пневматичної подушки. Досягаючи мінімального значення зазору 14, пружна дія пневматичної подушки зрівноважує електромагнітну силу. Фіксація та утримання об'єкта маніпулювання 13 на поверхні пневматичної подушки здійснюється зміною електромагнітної сили притягання котушок 11. Для кожної котушки 11 існує можливість змінювати електромагнітну силу залежно від величини зазору 14. У випадку зміщення або перекосу об'єкта маніпулювання 13, між торцевими поверхнями захоплювача і об'єкта маніпулювання утворюється клиновий зазор. Залежно від значення перекосу буде змінюватись електромагнітна сила притягування, що створюється окремо кожною котушкою 11. Величина зазору контролюється за допомогою індуктивних давачів 12. Додатковий ефект досягається при захопленні об'єктів маніпулювання із зміщеною віссю обертання та центром мас, що дозволить забезпечити ефективне позиціювання, а також компенсувати відхилення від вертикальності за рахунок регулювання електромагнітної сили захоплення через відповідну котушку. Запропонована конструкція захоплювального пристрою має більшу універсальність, підвищує силові характеристики за рахунок комбінації струменевого та магнітного захоплювальних пристроїв, забезпечує безконтактність захоплення, високу точність позиціювання, вантажопідіймальність і коефіцієнт корисної дії. 5 Комп’ютерна верстка М. Мацело 64472 6 Підписне Тираж 23 прим. Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюGripping device
Автори англійськоюSavkiv Volodymyr Bohdanovych, Prots Yaroslav Ivanovych, Skochylias Viktor Volodymyrovych, Fendio Olena Mykolaivna, Savkiv Halyna Volodymyrivna, Fedoriv Petro Stepanovych, Bihus Volodymyr Viktorovych
Назва патенту російськоюЗахватное устройство
Автори російськоюСавкив Владимир Богданович, Проц Ярослав Иванович, Скочиляс Виктор Владимирович, Фендьо Елена Николаевна, Савкив Галина Владимировна, Федорив Петр Степанович, Бигус Владимир Викторович
МПК / Мітки
МПК: B25J 15/06
Мітки: захоплювальний, пристрій
Код посилання
<a href="https://ua.patents.su/3-64472-zakhoplyuvalnijj-pristrijj.html" target="_blank" rel="follow" title="База патентів України">Захоплювальний пристрій</a>
Електромагнітний захоплювальний пристрій
Номер патенту: 54315
Опубліковано: 10.11.2010
Автори: Жарова Світлана Іванівна, Гавва Олександр Миколайович, Куєвда Валерій Петрович, Пашенковська Олена Сергіївна, Валіулін Геннадій Романович
МПК: B25J 15/06, B66C 1/00
Мітки: електромагнітний, пристрій, захоплювальний
Формула / Реферат:
Електромагнітний захоплювальний пристрій, який складається із стінок, стояків, котушки і кришки, який відрізняється тим, що електромагнітний захоплювальний пристрій складається із бічних L-подібної форми стінок, які стоять на відстані одна від одної і розташовані одна проти одної на відстані ширини обмотки котушки, перевернених Т-подібних стояків зі скосами, які розташовані всередині котушки і які контактують під нею з бічними стінками, а...
Захоплювальний пристрій

Номер патенту: 32431
Опубліковано: 12.05.2008
Автори: Грисюк Олександр Віталійович, Кузнєцов Юрій Миколайович, Мошковський Олег Миколайович
МПК: B25J 15/00, B25J 15/12, B25B 11/00
Мітки: пристрій, захоплювальний
Формула / Реферат:
Захоплювальний пристрій, що містить корпус, закріплений на ньому пневмоциліндр і затискні губки, при цьому пневмоциліндр оснащений поршнем з штоком, а затискні губки виконані у вигляді еластичних балонів і розташовані з боку штокової частини пневмоциліндра, який відрізняється тим, що еластичні балони виконані у вигляді набору кілець тороїдальної форми, співвісно розташованих відносно пневмоциліндра.
Захоплювальний пристрій для листового матеріалу
Номер патенту: 28157
Опубліковано: 26.11.2007
Автори: Шканов Олег Юхимович, Шабалдак Микола Васильович
МПК: B66C 1/00
Мітки: матеріалу, листового, захоплювальний, пристрій
Формула / Реферат:
1. Захоплювальний пристрій для листового матеріалу, що містить скобу, з верхньою частиною якої за допомогою шарнірної осі з'єднаний притискач, один кінець якого скріплений з віссю для навішування канатного стропа вантажопідйомного пристрою, та механізм фіксації притискача, який відрізняється тим, що скоба виконана у вигляді 2-х С-подібних щік, що паралельно розташовані та жорстко скріплені між собою накладками по зовнішньому і внутрішньому...
Захоплювальний пристрій
Номер патенту: 35973
Опубліковано: 16.04.2001
Автори: Сімута Роман Русланович, Пасічник Віталій Анатолійович
МПК: B25J 5/00
Мітки: захоплювальний, пристрій
Формула / Реферат:
Захоплювальний пристрій, що містить корпус, виконаний з можливістю кріплення до торця маніпулятора і споряджений механізмом компенсації неточності взаємного розташування деталей з віддаленим центром піддатливості, який відрізняється тим, що механізм компенсації неточності взаємного розташування деталей з віддаленим центром піддатливості виконано у вигляді зовнішнього і внутрішнього коаксіальних циліндрів, з'єднаних між собою перетинкою,...
Захоплювальний пристрій промислового робота

Номер патенту: 32260
Опубліковано: 12.05.2008
Автори: Мажара Віталій Анатолійович, Павленко Іван Іванович, Годунко Максим Олегович
МПК: B65H 9/10
Мітки: промислового, захоплювальний, пристрій, робота
Формула / Реферат:
Захоплювальний пристрій промислового робота, що складається з пневмоциліндра, в якому розміщені поршень зі штоком, та приєднаних до штока затискних важелів з чотирма призматичними затискними елементами, який відрізняється тим, що два призматичні затискні елементи виконано рухомими.
Попередній патент: Привід круглов’язальної машини
Наступний патент: Спосіб візуалізації картини обтікання поверхні газовим потоком
Випадковий патент: Спосіб біоіндикації якості вод