Рівноміцне зубчасте зачеплення попова о.п. по контактним напруженням
Формула / Реферат
Зубчасте зачеплення з поздовжньо модифікованими зубами, яке складається із ведучого і веденого зубчастих коліс з розташованими на них зубами з кутом зачеплення ![]() = 20°, які складаються із енкаінтних головок і евольвентних ніжок, які знаходяться в контакті одне з одним, яке відрізняються тим, що кут зачеплення
= 20°, які складаються із енкаінтних головок і евольвентних ніжок, які знаходяться в контакті одне з одним, яке відрізняються тим, що кут зачеплення ![]() =18°, а висота немодифікованих головок зубів, як і висота ніжок зубів, збільшена на 0,25m, крім того, евольвентні криві ніжок зубів зубчастих коліс на відстанях
=18°, а висота немодифікованих головок зубів, як і висота ніжок зубів, збільшена на 0,25m, крім того, евольвентні криві ніжок зубів зубчастих коліс на відстанях ![]() і
і ![]() , які відраховують від дуг основних кіл з діаметрами db1 і db2, замінені енкаінтними кривими з радіусом кривизни
, які відраховують від дуг основних кіл з діаметрами db1 і db2, замінені енкаінтними кривими з радіусом кривизни ![]() і
і ![]() , які можна знайти за формулами:
, які можна знайти за формулами:

де m - модуль зачеплення; ![]() - коефіцієнти;
- коефіцієнти; ![]() - допуски в «-» на радіуси вершин зубів зубчастих коліс; b0 - півширина ділянки контакту при вході чи при виході зубів із зачеплення, яка дорівнює
- допуски в «-» на радіуси вершин зубів зубчастих коліс; b0 - півширина ділянки контакту при вході чи при виході зубів із зачеплення, яка дорівнює
![]()
де ![]() - приведені радіуси зубів при вході і при виході із зачеплення;
- приведені радіуси зубів при вході і при виході із зачеплення; ![]() - радіуси кривизни енкаінтних кривих головок зубів;
- радіуси кривизни енкаінтних кривих головок зубів; ![]() - радіуси кривизни евольвентних кривих ніжок зубів в полюсі зачеплення;
- радіуси кривизни евольвентних кривих ніжок зубів в полюсі зачеплення; ![]() - приведені радіуси енкаінтно-евольвентних бічних профілів зубів в полюсі зачеплення; Е - модуль пружності зубчастих коліс; Fn - нормальна сила, діюча на спряжену пару зубів; bw - довжина зубів; z1, z2 - числа зубів зубчастих коліс.
- приведені радіуси енкаінтно-евольвентних бічних профілів зубів в полюсі зачеплення; Е - модуль пружності зубчастих коліс; Fn - нормальна сила, діюча на спряжену пару зубів; bw - довжина зубів; z1, z2 - числа зубів зубчастих коліс.
Текст
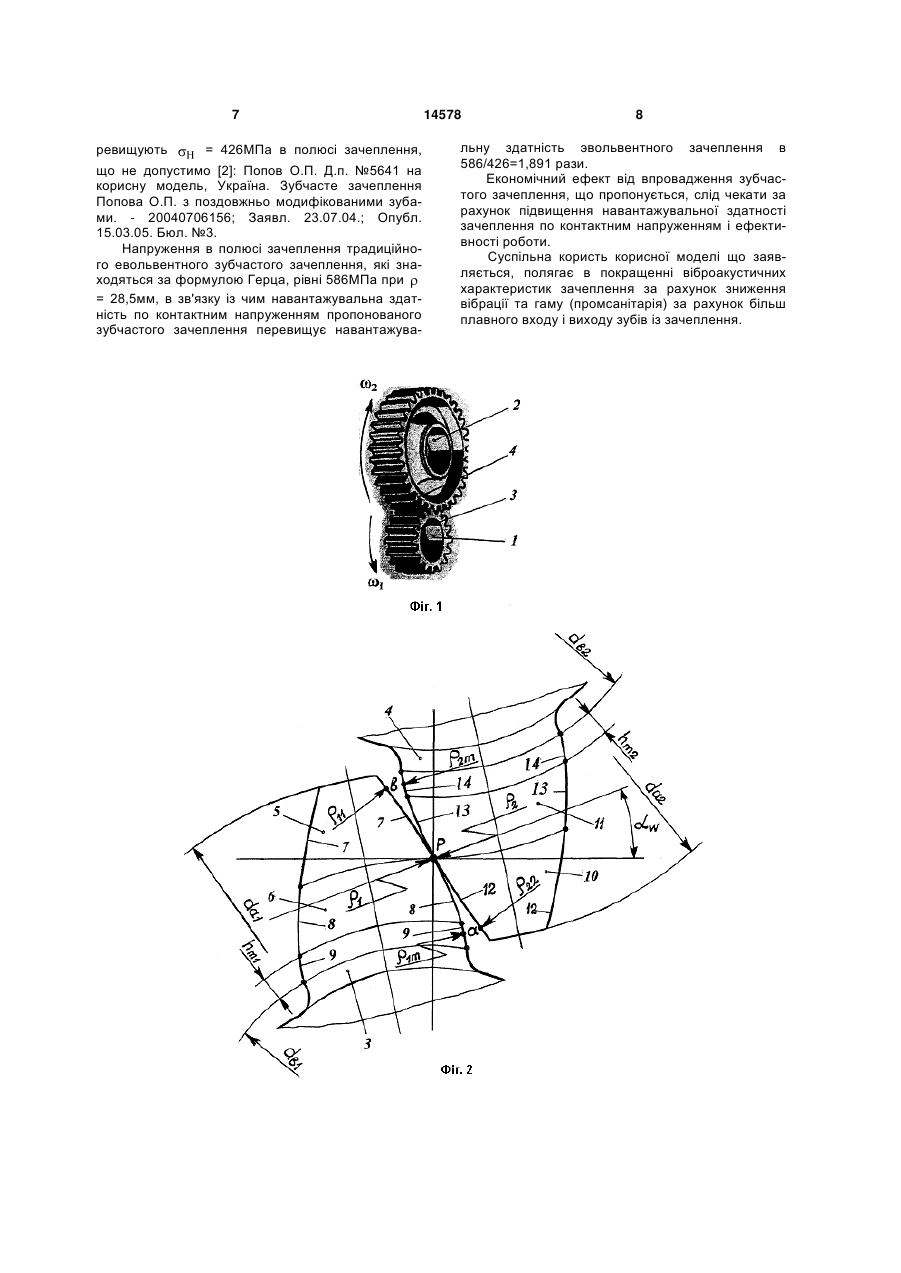
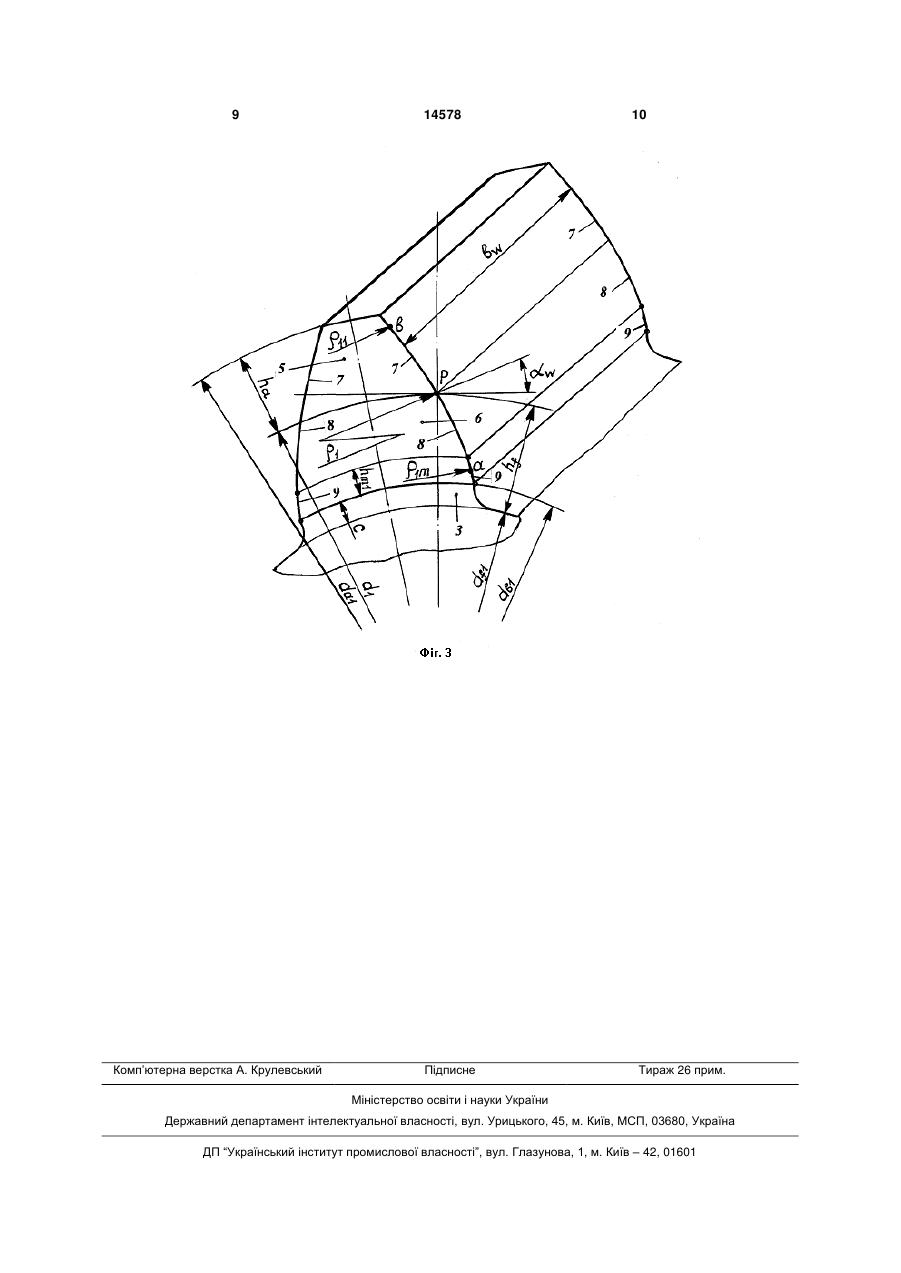
Зубчасте зачеплення з поздовжньо модифікованими зубами, яке складається із ведучого і веденого зубчастих коліс з розташованими на них зубами з кутом зачеплення w = 20°, які складаються із енкаінтних головок і евольвентних ніжок, які знаходяться в контакті одне з одним, яке відрі 2m , 2 ПР.2 0,25 ПР.1 0,25 ; 2 ПР.1 ПР.2 2m ПР.2 11 b0 1522 , 0,25 2 ПР.1 ; ПР.2 ПРFn ; Ebw де 1m 22 , b 2m 11 / 2m 11 ПР.1 1 22 / 1 22 , ПР.2 2 11 / 2 11 , - приведені радіуси енкаінтно-евольвентних бічних профілів зубів в полюсі зачеплення; Е - модуль пружності зубчастих коліс; Fn - нормальна сила, діюча на спряжену пару зубів; bw - довжина зубів; z1, z2 - числа зубів зубчастих коліс. Заявл. 12.07.02; Опубл. 15.04.03. Бюл. №4. Недоліком зубчастого зачеплення Попова О.П., як І зубчастого зачеплення з евольвентними зубами, являються дуже високі контактні напруження при виході зубів із зачеплення, які перевищують аналогічні напруження в полюсі зачеплення в два і більше разів. Найбільш близьким за технічною сутністю до пропонованого рішення є прийняте за найближчий аналог зубчасте зачеплення Попова О.П. з продольно модифікованими зубами, яке складаються із ведучого і веденого зубчастих коліс з розташова (19) Корисна модель відноситься до галузі машинобудування. Відоме зубчасте зачеплення Попова О.П., яке складається з ведучого і веденого зубчастих коліс з розташованими на них зубами, які складаються з енкаінтних [Слово «энкаита» происходит от сочетания букв НКИ - Николаевский кораблестроительный институт] голівок і евольвентних ніжок, які шляхом взаємодіє одне з одним здійснюють передачу навантаження і частоти обертання від одних валів Іншим валам машин і механізмів [1]: Попов О.П. Патент 55868А. Україна. Зубчасте зачеплення Попова О.П. - 2002075766; UA (11) де m - модуль зачеплення; m1 1 / b0, m2 2 / b0, - коефіцієнти; 1, 2 - допуски в «-» на радіуси вершин зубів зубчастих коліс; b0 - півширина ділянки контакту при вході чи при виході зубів із зачеплення, яка дорівнює ПР а b; a 1m 22 / - приведені радіуси зубів при вході і при виході із зачеплення; 3 2 / sin w 11 3 1 / sin w , 22 радіуси кривизни енкаінтних кривих головок зубів; 1 mz1 sin w / 2, 2 mz2 sin w / 2 - радіуси кривизни евольвентних кривих ніжок зубів в полюсі зачеплення; 2 11 U ПР.1 які можна знайти за формулами: (13) 22 1m 22 0,25m hm2 2(1 m2 )b 0 , які відраховують від дуг основних кіл з діаметрами db1 і db2, замінені енкаінтними кривими з радіусом кривизни 1m і 14578 0,25 зняються тим, що кут зачеплення w =18°, а висота немодифікованих головок зубів, як і висота ніжок зубів, збільшена на 0,25m, крім того, евольвентні криві ніжок зубів зубчастих коліс на відстанях і 0,25m hm1 2(1 m1)b0 3 14578 Для вирішення задачі в зубчатому зачепленні Попова О.П. з продольно модифікованими зубами, яке складаються із ведучого і веденого зубчастих коліс з розташованими на них зубами з кутом за ними на них зубами з кутом зачеплення w = 20°, які складаються з енкаінтних голівок і евольвентних ніжок, які знаходяться одне з одним в контакті [2]: Попов О.П. Д.п. №5641 на корисну модель. Україна. Зубчасте зачеплення Попова О.П. з поздовжньо модифікованими зубами. - 20040706156; Заявл. 23.07.04.; Опубл. 15.03.05. Бюл. №3. Недоліком даного зубчастого зачеплення Попова О.П. є відсутність можливості вирівнювання величин контактних напружень на вході і виході зубів із зачеплення до величин контактних напружень, які мають місце в полюсі зачеплення зубів. Задача корисної моделі - створення рівноміцного зубчастого зачеплення по контактним напруженням шляхом зниження контактних напружень на вході і виході зубів із зачеплення до величин контактних напружень в полюсі зачеплення зубів, підвищення навантажувальної здатності і ефективності роботи зубчастого зачеплення. 0,25 чеплення w = 20°, які складаються із енкаінтних головок і евольвентних ніжок, котрі знаходяться в контакті одне з одним, кут зачеплення w = 18°, а висота не модифікованих головок зубів, як і висота ніжок зубів, збільшена на 0,25м, крім того, евольвентні криві ніжок зубів зубчастих коліс на відста0,25m hm1 2(1 m1 )b 0 нях і 0,25m hm2 2(1 )b 0 m2 , які відраховують від дуг основних кіл з діаметрами db1 и db2, замінені енкаінтними кривими з радіусом кривизни 2m ПР.1 ПР.2 0,25 2 ПР.1 0,25 ; m модуль зачеплення; / b0, / b0, - коефіцієнти; 1, 2 m1 1 m2 2 -допуски в «-» на радіуси вершин зубів зубчастих колес; b0 – півширина ділянки контакту при вході ПР а b; a 1m 22 / - приведені радіуси зубів при вході і при виході із зачеплення; 3 2 / sin w радіуси 11 3 1 / sin w , 22 кривизни енкаінтних кривих голівок зубів; 1 mz1 sin w / 2, 2 mz2 sin w / 2 - радіуси кривизни евольвентних кривих ніжок зубів в полюсі зачеплення; ПР.1 1 22 / 1 22 , ПР.2 2 11 / 2 11 , приведені радіуси енкаінтно-евольвентних бічних профілів зубів в полюсі зачеплення; Е - модуль пружності зубчастих коліс; Fn - нормальна сила, діюча на спряжену пару зубів; bw - довжина зубів; z1,z2 - числа зубів зубчастих колес. Зіставлювальний аналіз з найближчим аналогом показує, що зубчасте зачеплення яке заявляється, яке складається з ведучого і веденого зубчастих коліс з розташованими на них зубами, які складаються із енкаінтних голівок і евольвентних ніжок, які знаходяться у контакті одне з одним, відрізняються тим, що кут зачеплення w = 18°, а висота не модифікованих голівок зубів, як і висота ніжок зубів, збільшена на 0,25т, крім того, евольвентні криві ніжок зубів зубчастих коліс на відстанях і 0,25m hm1 2(1 m1)b0 , 0,25m hm2 2(1 m2 )b0 , які відраховують від дуг основних кіл з діаметрами db1 і db2, замінені енкаінтними кривими з радіусом кривизни 1m і 2m , які знаходимо за приведеними формулами, де m модуль зачеплення; m1 1 / b0, m2 2 / b0, коефіцієнти; 1, 2 - допуски в «-» на радіуси вершин зубів зубчастих коліс; b0 - півширина ділянки контакту при вході чи при виході зубів із зачеплен і 2 ПР.1 11 ПР.2 2m ПР.2 11 де 1m , які можна знайти за формулами: 2 22 1m 22 4 0,25 2 ПР.1 ; ПР.2 чи при виході зубів із зачеплення, яка дорівнює b0 1m 1522 , ПРFn Ebw ; 22 , b 2m 11 / 2m 11 ня, яка знаходиться по відомій формулі Герца. Порівняння технічного рішення, яке заявляється, не лише з найближчим аналогом, але й з іншими технічними рішеннями в даній галузі техніки, не виявило в них признаки, які відрізняють технічне рішення, що заявляється, від прототипу, що дозволяє зробити висновок про відповідність критерію «винахідницький рівень». На Фіг.1 зображено одноступінчате зубчасте зачеплення; на Фіг.2 - взаємодію зубів зубчастих колес в полюсі зачеплення, а на Фіг.3 - зуб ведучого зубчастого колеса. На Фіг.1-3 дані наступні позначення: 1, 2 кутові швидкості ведучого і веденого зубчастих коліс; 1, 2 і - радіуси кривизни евольвентних зубів коліс в полюсі зачеплення; 11, 22 - радіуси кривизни енкаінтних кривих ніжок зубів в межах ділянок висотою hm1 і hm2; ha = 1,25m - висота голівки зуба; hf = 1,5m - висота ніжки зуба; m - модуль зачеплення; с = 0,25m - радіальний зазор між зубами; da1,da2 - діаметри вершин зубів; d1 - діаметр дільникового кола; db1,db2 - діаметри основних кіл; df - діаметр впадин зубів ведучого зубчастого колеса; bw, - довжина зубів; w - кут зачеплення; р полюс зачеплення; а, b - точки контакту зубів на вході і на виході із зачеплення. Зубчасте зачеплення складається із ведучого 1 і веденого 2 зубчастих колес з розташованими на них відповідно зубами 3 і 4. Зуб 3 ведучого зубчастого колеса 1 складається із енкаінтної голівки 5 висотою ha = 1,25m і евольвентної ніжки 6 висотою hf = ha + c = 1,5m. Бічні профілі 7 голівки зуба 3 являються енкаінтними з радіусом кривизни 11 , а бічні профілі 8 5 14578 вказаного зуба очерчені евольвентними кривими з радіусом кривизни 1 в полюсі зачеплення. При цьому в межах висоти hm1 = 0,25m, яку відраховуємо від діаметра db1 основного кола, евольвентні бічні профілі замінені енкаінтними кривими 9 з радіусом кривизни 1m . Аналогічним чином зуб 4 веденого зубчастого колеса 2 складається із енкаінтної голівки 10 висотою ha = 1,25m і евольвентної ніжки 11 висотою hf = 1,5m. Бічні профілі 12 голівки зуба 4 являються енкаінтними з радіусом кривизни 22 , а бічні профілі 13 зуба 4 виконані евольвентними з радіусом кривизни 2 в полюсі зачеплення. Крім того в межах висоти hm2 = 0,25m, яку відраховуємо від діаметра db2 основного кола, евольвентні бічні профілі замінені енкаінтними кривими 14 з радіусом кривизни 2m . Зубчасте зачеплення працює наступним чином. При обертанні ведучого зубчастого колеса 1 з кутовою швидкістю 1 енкаінтно - евольвентний зуб 3 діє на аналогічний зуб 4 веденого зубчастого колеса 2 таким чином, що ведене зубчасте колесо 2 приймає кутову швидкість 1 , передаючи при цьому від двигуна до виконуючого механізму корисне навантаження і частоту обертання. При цьому бічні профілі 7 і 8 зуба будуть обкатуватися по бічним профілям 12 і 13 зуба зі сковзанням до тих пір, поки спряжена пара зубів 3 і 4 не вийде із зачеплення. Початком спряження зубів 3 і 4 є точка а, а кінцем спряження - точка b. З урахуванням збільшення висоти головок і ніжок зубів на 0,25m і зменшення кута зачеплення w з 20° до 18° підвищиться робоча довжина лінії зачеплення спряженої пари зубів, у зв'язку із чим збільшиться коефіцієнт торцевого перекриття зубів і, як наслідок, зменшиться вібрація і гам в зачепленні. При вході і виході зубів із зачеплення в пропонованому технічному рішенні замість моделі контакту сегментоіда з циліндром, котра має місце в традиційному зубчастому зачепленні, мають місце моделі контакту двох циліндрів з радіусами 1m і 22(точка а) і двох циліндрів з радіусами 2m, i 11 (точка b). У відповідності із сказаним максимальні контактні напруження в точках а і b знаходяться за формулою Герца: EFn ; ab w a 0,418 b EFn 0,418 . bb w (1) де a 1m 22 / 1m 22 , b 2m 11 / 2m 11 приведенні радіуси зубів при вході і при виході із зачеплення. Максимальні контактні напруги в полюсі зачеплення (точка р) зубчастого зачеплення Попова О.П. мають вигляд [3]: Попов А.П. Нагрузочная 6 способность энкаитных зубчатых передач по контактным напряжениям // Вест. Национального техн. университета «ХПИ». - Харьков, 2004. - Вып. 30. - с.61-68: 0,836 .1 Fn , (2) bw .2 де ПР.1 1 22 / 1 22 , ПР.2 2 11 / 2 11 , приведені радіуси енкаінтно - евольвентних бічних профілів зубів в полюсі зачеплення; mz1 sin w / 2, 2 mz2 sin w / 2 - радіуси кри1 визни евольвентних кривих ніжок зубів в полюсі зачеплення; 3 2 / sin w 11 3 1 / sin w , 22 радіуси кривизни енкаітних кривих голівок зубів. Виходячи із рівності між собою максимальних контактних напружень , a i b, запишемо: 0,836 0,418 .1 .2 0,836 0,418 .1 ; a (3) . b .2 Використавши систему рівнянь (3) і нижче приведені вираження радіусів a, i b , знайдемо залежності радіусів 1m, i 2m : 2 0,25 ПР.1 22 ПР.2 1m 22 0,25 0,25 2 ПР.1 ПР.1 11 ПР.2 2 ПР.2 2m 11 0,25 (4) 2 ПР.1 ; . ПР.2 Так як максимальні контактні напруження a b, то у відповідності зі сказаним можемо записати a . b Для підтвердження достовірності нового технічного рішення і приведених залежностей (4) виконаємо розрахунки зубчастого зачеплення при z1 = 50; z2 =150; m = 5мм; w =18°; bw =150мм; Fn = 4.104H; E = 2,1.105МПа. По приведеним виразам знаходимо 1 = 42,75мм; 2 = 85,5мм; : 11 = 375мм; 22 = 750мм; 1 2/ 1m 1 2 28,5мм; = 58,247мм; 2m = 63,151мм; a = 54,048мм і b = 54,049мм. У відповідності із знайденими величинами радіусів кривизни по формулам (1) і (2) знаходимо a b, = 426МПа. Таким чином, пропоноване технічне рішення характеризується однаковими контактними напруженнями на вході і виході зубів із зачеплення, а також в полюсі зачеплення (Фіг.2, точки а, b, р). В традиційному зубчастому зачепленні Попова О.П. максимальні контактні напруження, наприклад, на вході зубів в зачеплення, при величинах допуску в «-» на радіуси вершин зубів, рівних 0,05; 0,10; 0,15; и 0,20мм, складають 941; 1072; 1192 и 1333МПа, тобто вони в 2 і більше разів пе 7 ревищують = 426МПа в полюсі зачеплення, що не допустимо [2]: Попов О.П. Д.п. №5641 на корисну модель, Україна. Зубчасте зачеплення Попова О.П. з поздовжньо модифікованими зубами. - 20040706156; Заявл. 23.07.04.; Опубл. 15.03.05. Бюл. №3. Напруження в полюсі зачеплення традиційного евольвентного зубчастого зачеплення, які знаходяться за формулою Герца, рівні 586МПа при = 28,5мм, в зв'язку із чим навантажувальна здатність по контактним напруженням пропонованого зубчастого зачеплення перевищує навантажува 14578 8 льну здатність эвольвентного зачеплення в 586/426=1,891 рази. Економічний ефект від впровадження зубчастого зачеплення, що пропонується, слід чекати за рахунок підвищення навантажувальної здатності зачеплення по контактним напруженням і ефективності роботи. Суспільна користь корисної моделі що заявляється, полягає в покращенні віброакустичних характеристик зачеплення за рахунок зниження вібрації та гаму (промсанітарія) за рахунок більш плавного входу і виходу зубів із зачеплення. 9 Комп’ютерна верстка А. Крулевський 14578 Підписне 10 Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюPopovs full-strength toothed coupling by contact tension
Автори англійськоюPopov Oleksii Pavlovych
Назва патенту російськоюРавнопрочное зубчатое зацепление попова о.п. по контактным напряжениям
Автори російськоюПопов Алексей Павлович
МПК / Мітки
МПК: F16H 1/00
Мітки: о.п, напруженням, рівноміцне, зубчасте, попова, зачеплення, контактним
Код посилання
<a href="https://ua.patents.su/5-14578-rivnomicne-zubchaste-zacheplennya-popova-op-po-kontaktnim-napruzhennyam.html" target="_blank" rel="follow" title="База патентів України">Рівноміцне зубчасте зачеплення попова о.п. по контактним напруженням</a>
Зубчасте зачеплення попова о.п. з поздовжньо модифікованими зубами
Номер патенту: 5641
Опубліковано: 15.03.2005
Автор: Попов Олексій Павлович
МПК: F16H 1/00
Мітки: зачеплення, попова, о.п, зубами, модифікованими, поздовжньої, зубчасте
Формула / Реферат:
Зубчасте зачеплення з поздовжньо модифікованими зубами, яке складається з ведучого і веденого зубчастих коліс з розташованими на них зубами, які містять евольвентні ніжки та неевольвентні головки, які знаходяться в зачепленні між собою, яке відрізняється тим, що бічні профілі ділянок зубів веденого зубчастого колеса, які прилеглі до їх вершин, у межах висоти виконані у...
Енкаітне евольвентне зубчасте зачеплення попова о.п.
Номер патенту: 11680
Опубліковано: 16.01.2006
Автор: Попов Олексій Павлович
МПК: F16H 1/00
Мітки: евольвентне, о.п, енкаітне, попова, зачеплення, зубчасте
Формула / Реферат:
Зубчасте зачеплення, що складається з ведучого та веденого зубчастих коліс з розташованими на них евольвентними зубами, які знаходяться між собою у зачепленні, яке відрізняється тим, що бічні профілі ніжок зубів коліс окреслені енкаітними кривими, отриманими шляхом подвійного повороту початкових бічних профілів ніжок зубів, що являють собою опуклі дуги кіл, відносно центрів обертання зубчастих коліс і відносно лінії зачеплення, причому...
Зубчасте зачеплення попова о.п.
Номер патенту: 55868
Опубліковано: 15.04.2003
Автор: Попов Олексій Павлович
МПК: F16H 1/00
Мітки: зубчасте, о.п, попова, зачеплення
Формула / Реферат:
Зубчасте зачеплення, що містить ведуче та ведене зубчасті колеса з розташованими на них зубами, що знаходяться в зачепленні між собою, яке відрізняється тим, що зуби виготовлені з евольвентних ніжок та неевольвентних головок, причому бокові профілі головок зубів отримані шляхом зменшення товщини початкових головок зубів по всій висоті з боковими профілями, які окреслені радіусами кривизни ρ11 і ρ22, розташованими на лінії...
Зубчаста передача попова о.п. з точковою системою зачеплення евольвентних зубів
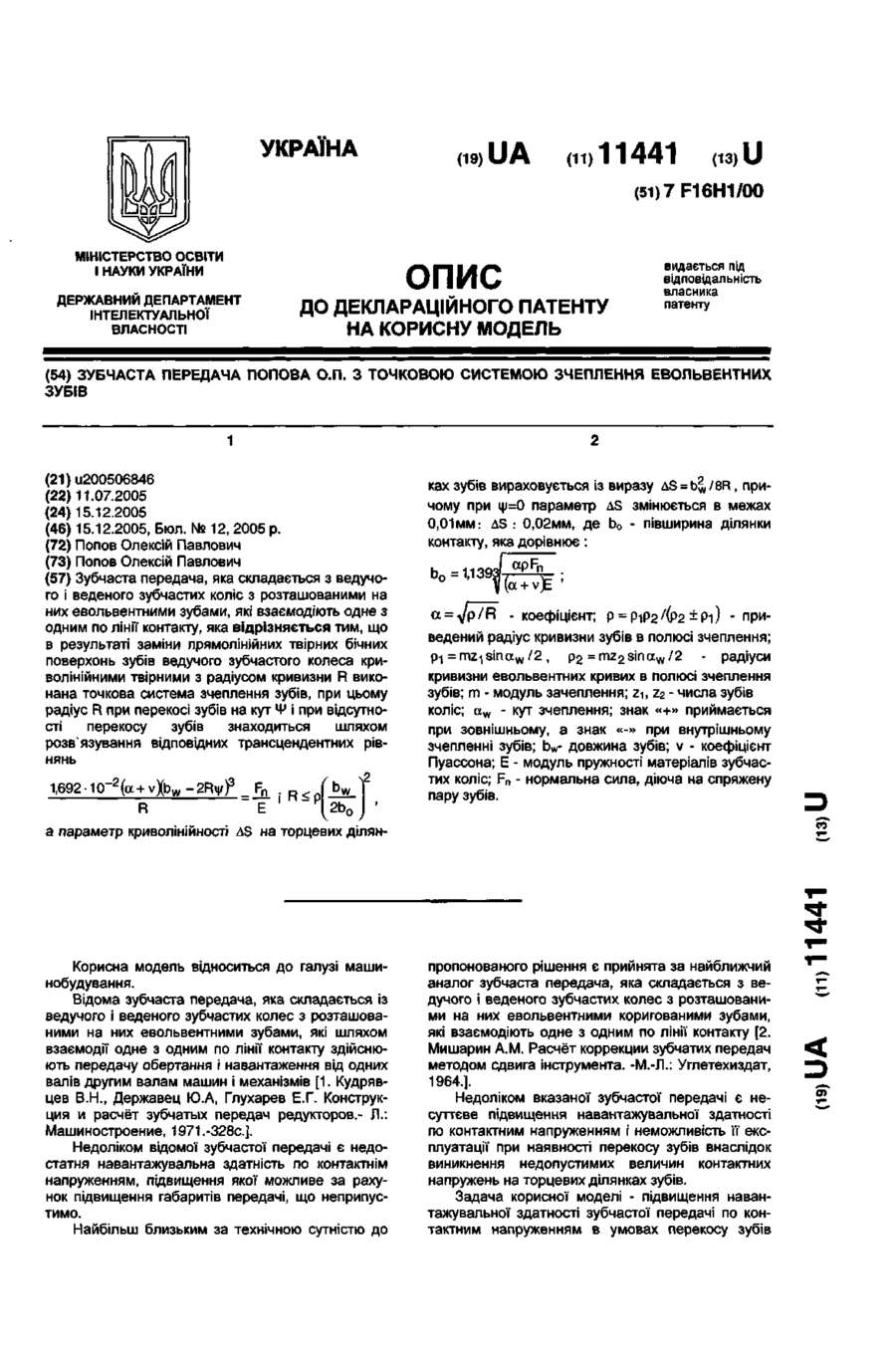
Номер патенту: 11441
Опубліковано: 15.12.2005
Автор: Попов Олексій Павлович
МПК: F16H 1/00
Мітки: системою, зубчаста, передача, зубів, о.п, зачеплення, евольвентних, точковою, попова
Формула / Реферат:
Зубчаста передача, яка складається з ведучого і веденого зубчастих коліс з розташованими на них евольвентними зубами, які взаємодіють одне з одним по лінії контакту, яка відрізняється тим, що в результаті заміни прямолінійних твірних бічних поверхонь зубів ведучого зубчастого колеса криволінійними твірними з радіусом кривизни R виконана точкова система зачеплення зубів, при цьому радіус R при перекосі зубів на кут Ψ і при відсутності...
Зубчасте зачеплення
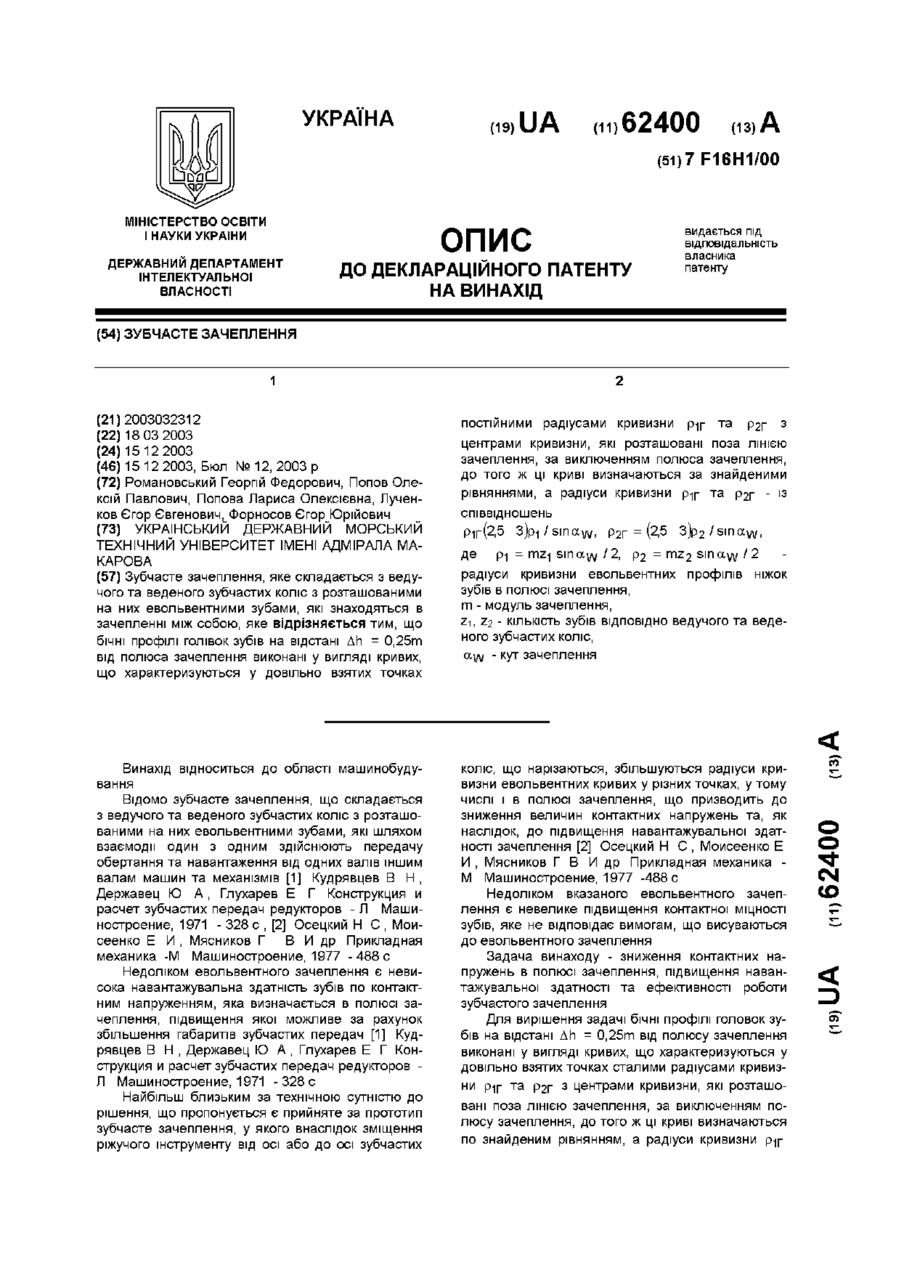
Номер патенту: 62400
Опубліковано: 15.12.2003
Автори: Лученков Єгор Євгенович, Форносов Єгор Юрійович, Попов Олексій Павлович, Попова Лариса Олексієвна, Романовський Георгій Федорович
МПК: F16H 1/00
Мітки: зачеплення, зубчасте
Формула / Реферат:
Зубчасте зачеплення, яке складається з ведучого та веденого зубчастих коліс з розташованими на них евольвентними зубами, які знаходяться в зачепленні між собою, яке відрізняється тим, що бічні профілі головок зубів на відстані = 0,25m від полюса зачеплення виконані у вигляді кривих, що характеризуються у довільно взятих точках постійними радіусами кривизни
Попередній патент: Теплоакумулююча капсула
Наступний патент: Засіб для лікування гострого порушення мозкового кровотоку
Випадковий патент: Дерматом для зрізування квазісереднього аутодермотрансплантата