Автобалансуючий пристрій для зрівноваження роторів із похилою віссю обертання
Номер патенту: 24595
Опубліковано: 10.07.2007
Автори: Яцун Володимир Володимирович, Філімоніхін Геннадій Борисович
Формула / Реферат
1. Автобалансуючий пристрій для зрівноваження роторів із похилою віссю обертання, який складається з корпусу, порожнини в корпусі, зовнішньої та внутрішньої стінки порожнини, вантажів, встановлених в порожнину з можливістю руху, який відрізняється тим, що містить пази, виконані в стінці порожнини, в яких розміщуються дві пари підпружинених уловлювачів з можливістю руху, які встановлені одна пара навпроти іншої симетрично відносно осі ротора, і в кожній парі розміщено по половині вантажів, щільно притиснутих один до одного.
2. Автобалансуючий пристрій за п. 1, який відрізняється тим, що пази виконані на зовнішній стінці порожнини.
3. Автобалансуючий пристрій за п. 1, який відрізняється тим, що пази виконані на внутрішній стінці порожнини.
4. Автобалансуючий пристрій за п. 1, який відрізняється тим, що пази виконані на зовнішній і внутрішній стінках порожнини.
5. Автобалансуючий пристрій за п. 2 або 4, який відрізняється тим, що уловлювачі, які встановлені в пази на зовнішній стінці порожнини, виконані у вигляді коромисла.
6. Автобалансуючий пристрій за п. 2 або 4, який відрізняється тим, що уловлювачі, які встановлені в пази на зовнішній стінці порожнини, виконані у вигляді повзуна.
7. Автобалансуючий пристрій за п. 2 або 4, який відрізняється тим, що уловлювачі, які встановлені в пази на зовнішній стінці порожнини, виконані у вигляді пружної пластини з вантажем на вільному кінці.
8. Автобалансуючий пристрій за п. 3 або 4, який відрізняється тим, що уловлювачі, які встановлені в пази на внутрішній стінці порожнини, виконані у вигляді важеля, з'єднаного з противагою.
9. Автобалансуючий пристрій за одним з пп. 2-4, який відрізняється тим, що вантажі виготовлені у вигляді роликів.
10. Автобалансуючий пристрій за одним з пп. 2-4, який відрізняється тим, що вантажі виготовлені у вигляді куль.
11. Автобалансуючий пристрій за п. 2, який відрізняється тим, що вантажі виготовлені у вигляді маятників.
12. Автобалансуючий пристрій за одним з пп. 1-11, який відрізняється тим, що має декілька порожнин, розташованих коаксіально щодо осі ротора.
13. Автобалансуючий пристрій за одним з пп. 1-11, який відрізняється тим, що має декілька порожнин, які розташовані щільно одна до одної по осі ротора.
14. Автобалансуючий пристрій за п. 12 або 13, який відрізняється тим, що в різних порожнинах використовуються різні типи вантажів.
Текст
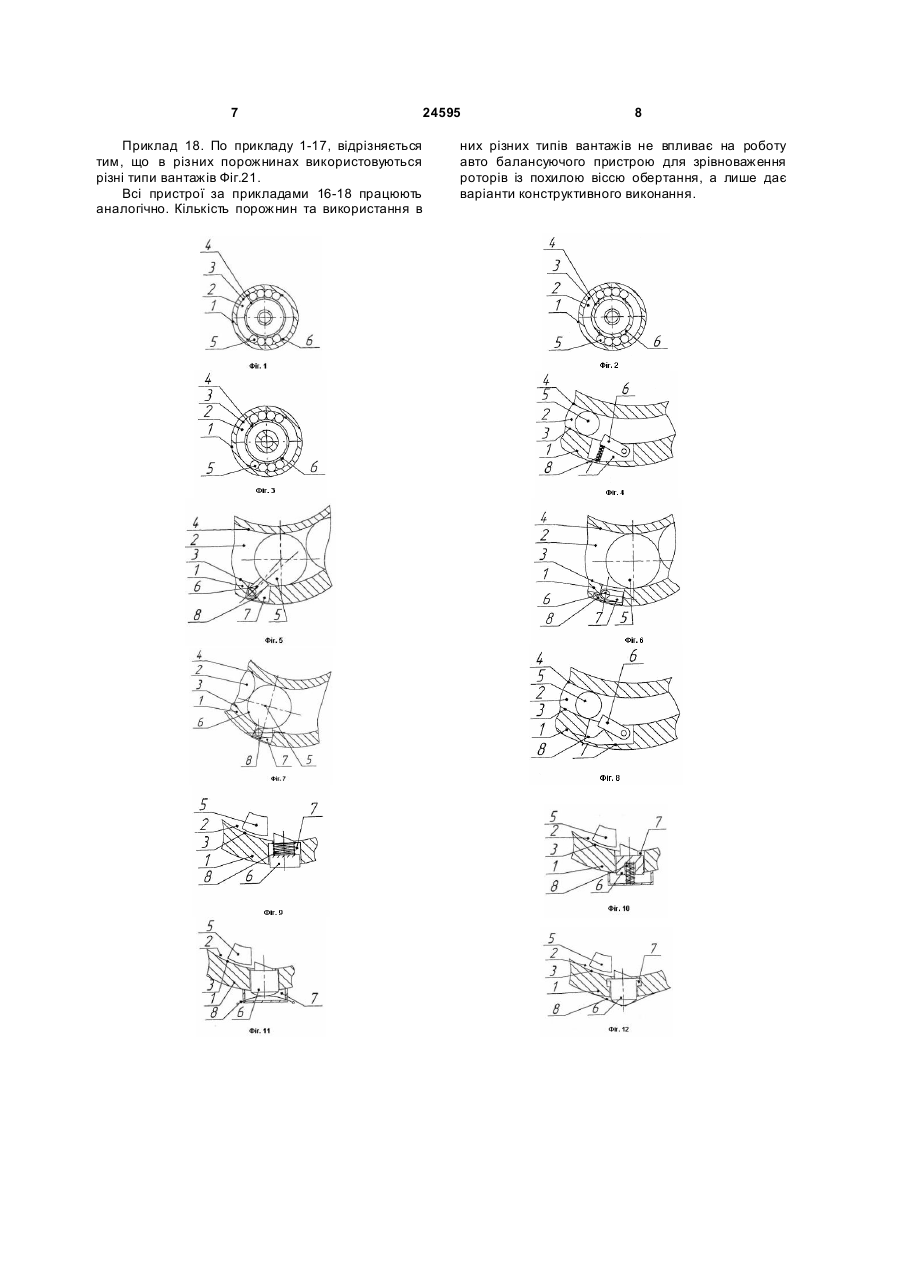
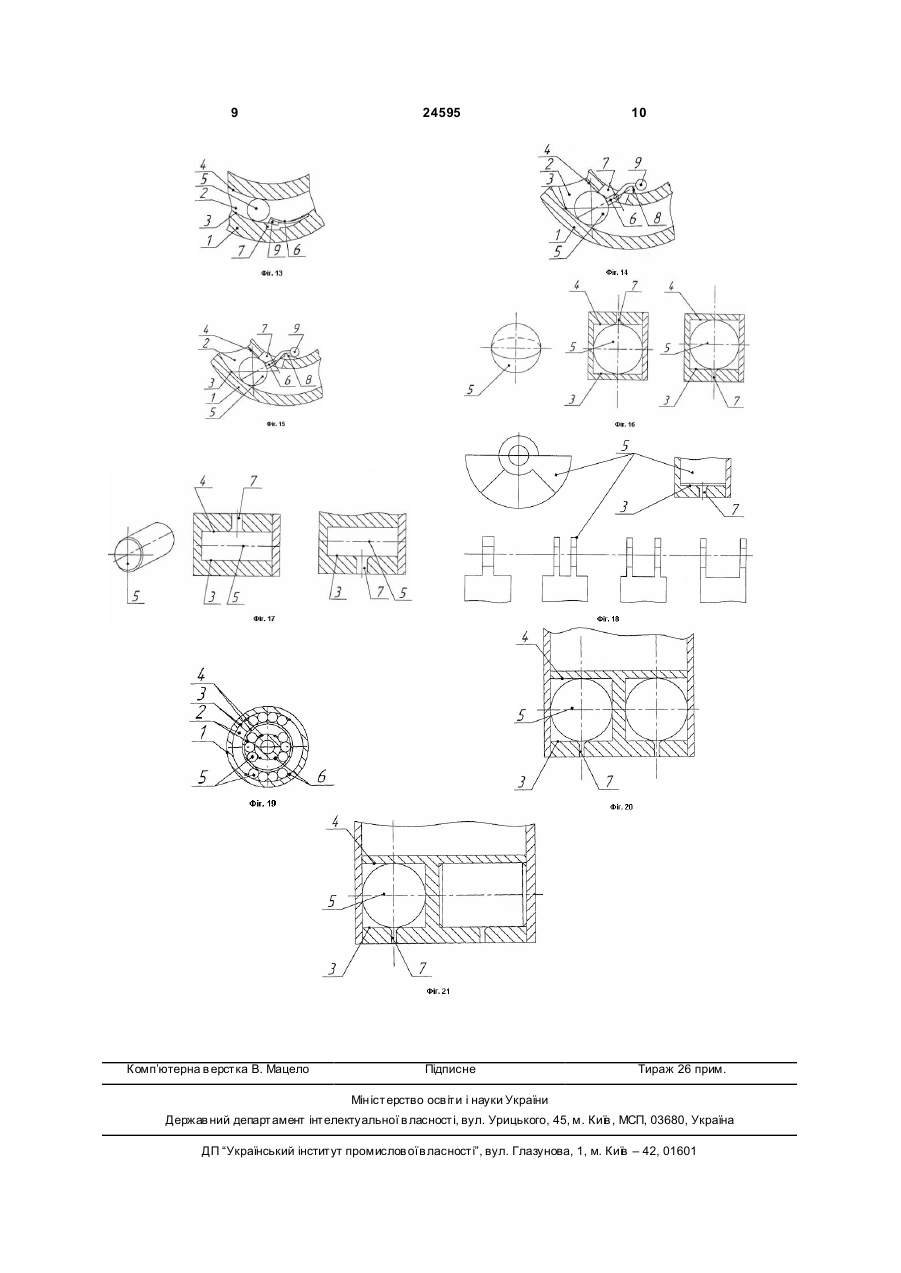
1. Автобалансуючий пристрій для зрівноваження роторів із похилою віссю обертання, який складається з корпусу, порожнини в корпусі, зовнішньої та вн утрішньої стінки порожнини, вантажів, встановлених в порожнину з можливістю руху, який відрізняється тим, що містить пази, виконані в стінці порожнини, в яких розміщуються дві пари підпружинених уловлювачів з можливістю руху, які встановлені одна пара навпроти іншої симетрично відносно осі ротора, і в кожній парі розміщено по половині вантажів, щільно притиснутих один до одного. 2. Автобалансуючий пристрій за п. 1, який відрізняється тим, що пази виконані на зовнішній стінці порожнини. 3. Автобалансуючий пристрій за п. 1, який відрізняється тим, що пази виконані на внутрішній стінці порожнини. 4. Автобалансуючий пристрій за п. 1, який відрізняється тим, що пази виконані на зовнішній і внутрішній стінках порожнини. 5. Автобалансуючий пристрій за п. 2 або 4, який відрізняє ться тим, що уловлювачі, які встановлені в пази на зовнішній стінці порожнини, виконані у вигляді коромисла. U 2 (11) 1 3 24595 Недоліком прототипу є те, що при повільному обертанні ротора вантажі рухаються хаотично чим вносять додатковий дисбаланс до системи, а також перегородки в прототипі унеможливлюють повне використання балансувальної ємності вантажів. Корисна модель вирішує задачу підвищення точності балансування, шляхом усунення несиметричності розташування вантажів на малих швидкостях обертання ротора, підвищення балансувальної ємності пристрою. Задача розв'язується завдяки тому, що у відомому автобалансуючому пристрою для зрівноваження роторів із похилою віссю обертання на закритичних швидкостях, який складається з корпусу, порожнини в корпусі, зовнішньої та внутрішньої стінки порожнини, вантажів встановлених в порожнину з можливістю руху, згідно корисної моделі містяться пази, виконані в стінці порожнини, в яких розміщуються дві пари підпружинених уловлювачів з можливістю руху, які встановлені одна пара навпроти іншої симетрично відносно осі ротора і в кожній парі розміщені по половині вантажів, щільно притиснутих один до одного. Крім того, уловлювачі можуть бути встановлені в пази як на зовнішній так і на внутрішній стінках порожнини або і на зовнішній і на внутрішній. Уловлювачі встановлені в пази на зовнішній стінці порожнини мають вигляд коромисла, повзуна або вигляд пружної пластини з масою на вільному кінці. Уловлювачі встановлені в пази на внутрішній стінці порожнини мають вигляд підпружиненого важеля з'єднаного з противагою. В якості вантажів можуть бути використані ролики, кулі та маятники, що рухаються в порожнині автобалансуючого пристрою для зрівноваження роторів із похилою віссю обертання, причому порожнин може бути декілька і вони розташовані коаксіально щодо осі ротора. Також автобалансуючі пристрої для зрівноваження роторів із похилою віссю обертання можуть мати декілька порожнин, які розташовані щільно одна до одної по осі ротора. В різних порожнинах можуть використовуватися різні типи вантажів. На Фіг.1 зображений автобалансуючий пристрій для зрівноваження роторів із похилою віссю обертання з уловлювачами на зовнішній стінці порожнини. На Фіг.2 зображений автобалансуючий пристрій для зрівноваження роторів із похилою віссю обертання з уловлювачами на внутрішній стінці порожнини. На Фіг.3 зображений автобалансуючий пристрій для зрівноваження роторів із похилою віссю обертання з уловлювачами на зовнішній та внутрішній стінках порожнини. На Фіг.5 зображений уловлювач, який утримує вантаж. На Фіг.6 зображений уловлювач в пазу. На Фіг.7 зображено захід вантажу до уловлювача. На Фіг.4, 815 зображені варіанти виконання уловлювачів. На Фіг.16 зображений вантаж - куля, форма порожнини для куль, та варіанти розміщення пазу для уловлювача. На Фіг.17 зображений вантаж - ролик, форма порожнини для роликів, та варіанти розміщення пазу для уловлювача. На Фіг.18 зображений вантаж - маятник, форма порожнини для маятників, та розміщення пазу для уловлювача на зовнішній стінці порожнини для маятників. На 4 Фіг.19 зображений автобалансуючий пристрій для зрівноваження роторів із похилою віссю обертання, що має декілька порожнин, розташованих коаксіально щодо осі ротора. На Фіг.20 зображений автобалансуючий пристрій для зрівноваження роторів із похилою віссю обертання, що має декілька порожнин, які розташовані щільно одна до одної по осі ротора, На Фіг.21 зображений варіант використання різних типів вантажів в різних порожнинах. Автобалансуючий для зрівноваження роторів із похилою віссю обертання, складається з корпусу 1, порожнини в корпусі 2, зовнішню 3 та внутрішню 4 стінок порожнини, вантажів 5 встановлених в порожнину з можливістю руху по порожнині, уловлювачів 6 встановлених в пази 7 на зовнішній стінці порожнини, пружин 8. Автобалансуючий пристрій для зрівноваження роторів із похилою віссю обертання працює наступним чином. Оскільки в кожній порожнині 2 міститься дві пари уловлювачів 6, то всі вантажі 5 без перешкод уловлюються і не відбувається запирання вантажів в просторі між парами уловлювачів. Оскільки в кожному з уловлювачів 6 знаходиться однакова кількість коригувальних вантажів 5, розташованих симетрично відносно ротора, щільно притиснутих один до одного, то вантажі 5 не вносять дисбаланс до системи. Під час розгону ротора відцентрові сили ще малі і оскільки уловлювачі 6 ще працюють і тримають коригувальні вантажі 5 в згаданих положеннях на швидкостях менших за швидкість перемикання, то коригувальні вантажі 5 розганяються синхронно з ротором і не вносять при цьому додаткового дисбалансу в систему. При певній швидкості перемикання ці сили більші ніж сила тиску пружини 8 на уловлювач 6 і він зачиняється, даючи можливість вільного руху коригувальних вантажів 5 по стінці порожнини 3, 4, які самі приходять у положення у якому зрівноважують ротор. Кутова швидкість перемикання повинна бути більша за швидкість wкр , при переході через яку починається автобалансування. При досягненні ротором робочої частоти обертання, коригувальні вантажі 5 під дією діючих на них сил самі займають положення, в якому зрівноважують ротор, і далі обертаються з ним як одне ціле. При гальмуванні ротора відцентрові сили поступово зменшуються. У діапазоні швидкостей wкр < w < w* - відкриваються уловлювачі 6, проте автобалансування триває. При падінні швидкості нижче wкр автобалансування припиняється і коригувальні вантажі 5 під дією виникаючих тангенціальних сил починають рухатися, доки не досягнуть уловлювачів 6. Як наслідок вони уловлюються, завдяки чому відбувається спокійний вибіг ротора. Так як ротор із похилою віссю обертання, то під час вибігу ротора сили тяжіння вагомі і сприяють потраплянню вантажів 5 до уловлювачів 6. Уловлювачі 6 можуть встановлюватися в пази 7 на зовнішній 3 і на внутрішній 4 стінках порожни 5 24595 ни, в залежності від конструктивних особливостей ротора. Тип уловлювачів не впливає на роботу автобалансуючого пристрою для зрівноваження роторів із похилою віссю обертання, а лише дає варіанти конструктивного виконання уловлювачів. Коригувальні вантажі у вигляді кулі мають найменші втрати на тертя кочення, тому вони найбільш точно балансують ротор. Проте вони мають найменшу балансувальну ємність і потребують більш точного виконання пазу для уловлювача. Коригувальні вантажі у вигляді ролика мають більші втрати на тертя ніж кулі, тому вони менш точно балансують ротор. Але вони мають більшу балансувальну ємність ніж кулі і не потребують точного виконання пазу для уловлювача. Маятникові коригувальні вантажі мають найбільші втрати на тертя, тому вони найменш точно балансують ротор. Проте маятникові коригувальні вантажі мають найбільшу балансувальну ємність і не потребують точного виконання пазу для уловлювача, так як взагалі не торкаються зовнішньої стінки порожнини для маятників. При виконанні автобалансуючого пристрою для зрівноваження роторів із похилою віссю обертання з декількома порожнинами, для усунення несиметричності осьових моментів інерції ротора уловлювачі на одній біговій доріжці встановлюються із зміщенням на 90° по відношення до уловлювачів на іншій доріжці. Використання декількох порожнин підвищує балансувальну ємність автобалансуючого пристрою для зрівноваження роторів із похилою віссю обертання. Приклади конкретного виконання. Приклад 1. На Фіг.1 зображений автобалансуючий для зрівноваження роторів із похилою віссю обертання, що має корпус 1, порожнину в корпусі 2, зовнішню 3 та внутрішню 4 стінки порожнини, вантажі 5 встановлені в порожнину з можливістю руху по порожнині, уловлювачі 6 встановлені в пази 7 на зовнішній стінці порожнини. Для зрівноваження ротора у одній площині корекції використовується один автобалансуючий пристрій для зрівноваження роторів із похилою віссю обертання. Він насаджується на вал ротора як можна ближче до площини статичного дисбалансу ротора. Для повного зрівноваження ротора використовується два автобалансуючи х пристрої для зрівноваження роторів із похилою віссю обертання, які насаджуються на вал ротора з різних сторін відносно ротора, або на деякій відстані один від одного - з одної сторони. Приклад 2. По прикладу 1, відрізняється тим, що уловлювачі 6 встановлені в пази 7 на внутрішній 4 стінці порожнини 2 Фіг.2. Приклад 3. По прикладу 1-2, відрізняється тим, що уловлювачі 6 встановлені в пази 7 на внутрішній 4 і на зовнішній 3 стінках порожнини 2 одночасно Фіг.3. Всі пристрої за прикладами 1-3 працюють однаково не залежно від розміщення уловлювачів. Приклад 4. По прикладу 1-3, відрізняється тим, що уловлювачі 6 являють собою рухомі коромис 6 ла, з'єднані з пружинами стиску 8, встановлені в пази 7 на зовнішній стінці 3 порожнини 2 Фіг.4. Завдяки асиметричній формі уловлювачів вантажі здатні проходити тільки в одному напрямку. Приклад 5. По прикладу 4, відрізняється тим, що уловлювачі являють собою рухомі коромисла, з'єднані з пружинами згину 8, встановлені в пази 7 на зовнішній стінці 3 порожнини 2 Фіг.8. Приклад 6. По прикладу 5, відрізняється тим, що уловлювачі 6 р ухаються вздовж своєї осі (повзуни) і з'єднані з пружинами розтягу 8, Фіг.9. Така конструкція найкраща для маятникових автобалансуючи х пристроїв для зрівноваження роторів із похилою віссю обертання, завдяки формі стопора. Приклад 7. По прикладу 6, відрізняється тим, що уловлювачі 6 р ухаються вздовж своєї осі (повзуни) і з'єднані з пружинами стиску 8, Фіг.10. Така конструкція також найкраще підходить для маятникових автобалансуючих пристроїв для зрівноваження роторів із похилою віссю обертання, завдяки формі стопора. Приклад 8, 9. По прикладу 5-6, відрізняється тим, що уловлювачі 6 з'єднані з пружинами згину 8 Фіг.11, а у прикладі 9 - з парою пружин згину 8 Фіг.12. Завдяки даній конструкції автобалансуючий пристрій для зрівноваження роторів із похилою віссю обертання може використовуватись при значних швидкостях, так як пружина згину 8 має високу жорсткість. Приклад 10. По прикладу 1-9, відрізняється тим, що уловлювачі 6 виготовлені у вигляді пружних пластин з масами 9 на вільному кінці Фіг.13. Маса 9 необхідна для виключення уловлювачів 6 з роботи на необхідній швидкості обертання ротора під дією відцентрових сил та для створення площі контакту для утримання вантажів 5. Приклад 11. По прикладу 1-10, відрізняється тим, що уловлювачі 6, які встановлюються в пази 7 на внутрішній стінці 4 порожнини 2 мають вигляд важелів жорстко з'єднаних з противагами 9 Фіг.14. Для утримання важелів у відкритому положенні дана конструкція має пружини стиску 8. Противаги 9 служать для закриття важелів під дією відцентрових сил на певній швидкості. Приклад 12. По прикладу 11, відрізняється тим, що для утримання важелів у відкритому положенні дана конструкція має пружини згину 8 Фіг.15. Приклад 13. По прикладу 1-12, відрізняється тим, що вантажі виготовлені у вигляді куль Фіг.16. Приклад 14. По прикладу 1-13, відрізняється тим, що вантажі виготовлені у вигляді роликів Фіг.17. Приклад 15. По прикладу 1, 3-14, відрізняється тим, що вантажі виготовлені у вигляді маятників Фіг.18. Всі пристрої за прикладами 4-15 працюють аналогічно, не залежно від конструкції уловлювачів чи тип у вантажів. Приклад 16. По прикладу 1-15, відрізняється тим, що має декілька порожнин розташованих коаксіально щодо осі ротора Фіг.19. Приклад 17. По прикладу 16, відрізняється тим, що має декілька порожнин, які розташовані щільно одна до одної по осі ротора Фіг.20. 7 24595 Приклад 18. По прикладу 1-17, відрізняється тим, що в різних порожнинах використовуються різні типи вантажів Фіг.21. Всі пристрої за прикладами 16-18 працюють аналогічно. Кількість порожнин та використання в 8 них різних типів вантажів не впливає на роботу авто балансуючого пристрою для зрівноваження роторів із похилою віссю обертання, а лише дає варіанти конструктивного виконання. 9 Комп’ютерна в ерстка В. Мацело 24595 Підписне 10 Тираж 26 прим. Міністерство осв іт и і науки України Держав ний департамент інтелектуальної в ласності, вул. Урицького, 45, м. Київ , МСП, 03680, Україна ДП “Український інститут промислов ої в ласності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for automatically balancing a rotor with tilted axis of rotation
Автори англійськоюFilimonikhin Hennadiy Borysovych, Yatsun Volodymyr Volodymyrovych
Назва патенту російськоюУстройство для автоматической балансировки ротора с наклонной осью вращения
Автори російськоюФилимонихин Геннадий Борисович, Яцун Владимир Владимирович
МПК / Мітки
МПК: G01M 1/38
Мітки: пристрій, автобалансуючий, обертання, віссю, похилою, зрівноваження, роторів
Код посилання
<a href="https://ua.patents.su/5-24595-avtobalansuyuchijj-pristrijj-dlya-zrivnovazhennya-rotoriv-iz-pokhiloyu-vissyu-obertannya.html" target="_blank" rel="follow" title="База патентів України">Автобалансуючий пристрій для зрівноваження роторів із похилою віссю обертання</a>
Кульовий автобалансир для зрівноваження тіл з вертикальною віссю обертання /варіанти/
Номер патенту: 64922
Опубліковано: 15.03.2004
Автори: Філімоніхін Геннадій Борисович, Черниш Сергій Григорович
Мітки: обертання, зрівноваження, варіанти, кульовий, вертикальною, віссю, автобалансир, тіл
Формула / Реферат:
1. Кульовий автобалансир для зрівноваження тіл з вертикальною віссю обертання, що містить порожнистий корпус, у ньому бігову доріжку у вигляді поверхні обертання, кулі, розміщені на біговій доріжці, що мають такий діаметр і таку кількість, що притиснуті одна до одної і розташовані в один ряд по колу на біговій доріжці, причому остання має ухил, що забезпечує рух куль по висоті доріжки на зарезонансних швидкостях обертання тіла, корпус...
Автобалансуючий пристрій
Номер патенту: 75189
Опубліковано: 15.03.2006
Автори: Майоров Володимир Сергійович, Філімоніхін Генадій Борисович
МПК: F16F 15/00, G01M 1/38
Мітки: автобалансуючий, пристрій
Формула / Реферат:
1. Автобалансуючий пристрій для зрівноваження роторів на закритичних швидкостях обертання, що має корпус з біговою доріжкою, розміщеною на поверхні внутрішнього кільцевого отвору корпуса, обмежувачі, які ділять бігову доріжку на сектори, та вантажі, які розміщені з можливістю руху по секторах на біговій доріжці і при цьому не повністю заповнюють кожний сектор, який відрізняється тим, що сектори рівні і в кожному секторі розташовано однакову...
Автобалансуючий пристрій
Номер патенту: 58675
Опубліковано: 15.08.2003
Автори: Філімоніхін Геннадій Борисович, Майоров Володимир Сергійович
МПК: G01M 1/38
Мітки: автобалансуючий, пристрій
Формула / Реферат:
Автобалансуючий пристрій, що працює на закритичній швидкості обертання, містить корегуючі вантажі, насаджені на осі, перпендикулярні валу, який відрізняється тим, що осі корегуючих вантажів виконуються з різзю на кінці і встановлюються у втулки з ексцентриситетним отвором.
Автобалансуючий пристрій

Номер патенту: 53169
Опубліковано: 15.01.2003
Автори: Майоров Володимир Сергійович, Філімоніхін Генадій Борисович
МПК: G01M 1/30
Мітки: автобалансуючий, пристрій
Формула / Реферат:
1. Автобалансуючий пристрій, що працює на позакритичній швидкості обертання, який містить корегуючі вантажі, вільно насаджені на осі, перпендикулярній валу, який відрізняється тим, що додатково встановлений механізм примусового приведення корегуючих вантажів в нейтральне положення.2. Автобалансуючий пристрій за п. 1, який відрізняється тим, що механізм примусового приведення корегуючих вантажів в нейтральне положення утворює нелінійний...
Автобалансуючий пристрій (варіанти)
Номер патенту: 61701
Опубліковано: 17.11.2003
Автори: Невдаха Юрій Андрійович, Філімоніхін Геннадій Борисович
МПК: G01M 1/30, G01M 1/00, G01M 1/36
Мітки: автобалансуючий, пристрій, варіанти
Формула / Реферат:
1. Автобалансуючий пристрій, призначений для балансування вертикально розташованих роторів на закритичних швидкостях обертання, що містить коригуючі вантажі, які насаджені на осі, перпендикулярні валу і попарно зв'язані між собою так, що можуть повертатися навколо цих осей на рівні кути у протилежні боки, і розташований у порожнині ротора чи власного корпусу, який відрізняється тим, що порожнина частково заповнюється рідкою...
Попередній патент: Пристрій для навивання соленоїдів
Наступний патент: Спосіб використання препарату бетафін як стимулятора для підвищення продуктивності свиней
Випадковий патент: Барабанно-валковий підготовлювач