Верстат для ограновування нижньої частини алмазу
Формула / Реферат
1. Верстат для ограновування нижньої частини алмазу, що містить чотири основні модулі - модуль зсуву, модуль підйому, модуль повороту і модуль покрокової установки та два додаткові модулі - модуль контролю ваги і електронний блок, при цьому модуль зсуву виконаний з можливістю переміщення алмазу в горизонтальному напрямі і містить основу, на якій за допомогою двох шарикопідшипників встановлено два вали і втулки ковзання, корпус втулки шарикопідшипника, двигун, встановлений на плиті, вал якого з'єднаний з повзуном, і самоцентруючий підшипник, розташований всередині важеля, модуль підйому виконаний з можливістю переміщення алмазу у вертикальному напрямі і містить двигун, встановлений нижче за плиту для установки двигуна модуля зсуву, вал, зафіксований на плиті для установки двигуна за допомогою гвинта, шліца і підшипника з глибокою канавкою, і корпус втулки шарикопідшипника, захищений сталевим кожухом, при цьому в нижній частині сталевого кожуха встановлений опорний підшипник з тримачем, до якого приєднаний вал двигуна, всередині тримача опорного підшипника розташований гвинт з різьбою для здійснення підйому і шпилька з внутрішньою різьбою, крім того є корпус втулки шарикопідшипника, що забезпечує плавний рух шпильки, всередину якої поміщена сталева кулька, що задає обмеження знизу, а до корпусу втулки шарикопідшипника під кутом 90° приєднаний важіль, що з'єднує корпус втулки шарикопідшипника з модулем повороту, верстат має пружину для щільного притиску алмазу і розпірку, що утримує плиту для установки двигуна і верхню пластину, модуль повороту містить двигун, встановлений на несучу пластину, вал двигуна, зафіксований гвинтом без головки, тримач, в якому встановлено два підшипники і дві розпірні втулки, одна з яких призначена для внутрішнього кільця, а друга - для зовнішнього кільця підшипника, причому обидва підшипники утримано однією стопорною гайкою, модуль покрокової установки виконаний з можливістю розміщення алмазу і автоматичного змінення положення граней залежно від кількості граней, заданого за допомогою панелі керування, модуль контролю ваги містить ручку контролю ваги, пружину і шкалу, а електронний блок верстата містить загальне джерело живлення для всіх чотирьох модулів, панель керування містить драйвери для двигуна кожного модуля і виконана з можливістю генерування керуючих сигналів для рідкокристалічного дисплея і світлодіодів для регулярного представлення інформації про стан алмазу, до панелі керування приєднана клавіатура, крім того, для панелі керування розроблено програмне забезпечення.
2. Верстат за п. 1, який відрізняється тим, що між підшипниками встановлена розпірна втулка.
3. Верстат за п. 1, який відрізняється тим, що в джерелі живлення передбачене резервне батарейне живлення.
4. Верстат за п. 1, який відрізняється тим, що містить рідкокристалічний дисплей для відображення стану алмазу, заданих параметрів, роботи системи, деяких параметрів системи і відображення повідомлень.
5. Верстат за п. 1, який відрізняється тим, що модуль зсуву має кулачковий механізм з двома підшипниками модуля повороту, що перетворює обертальний рух в поступальний.
Текст
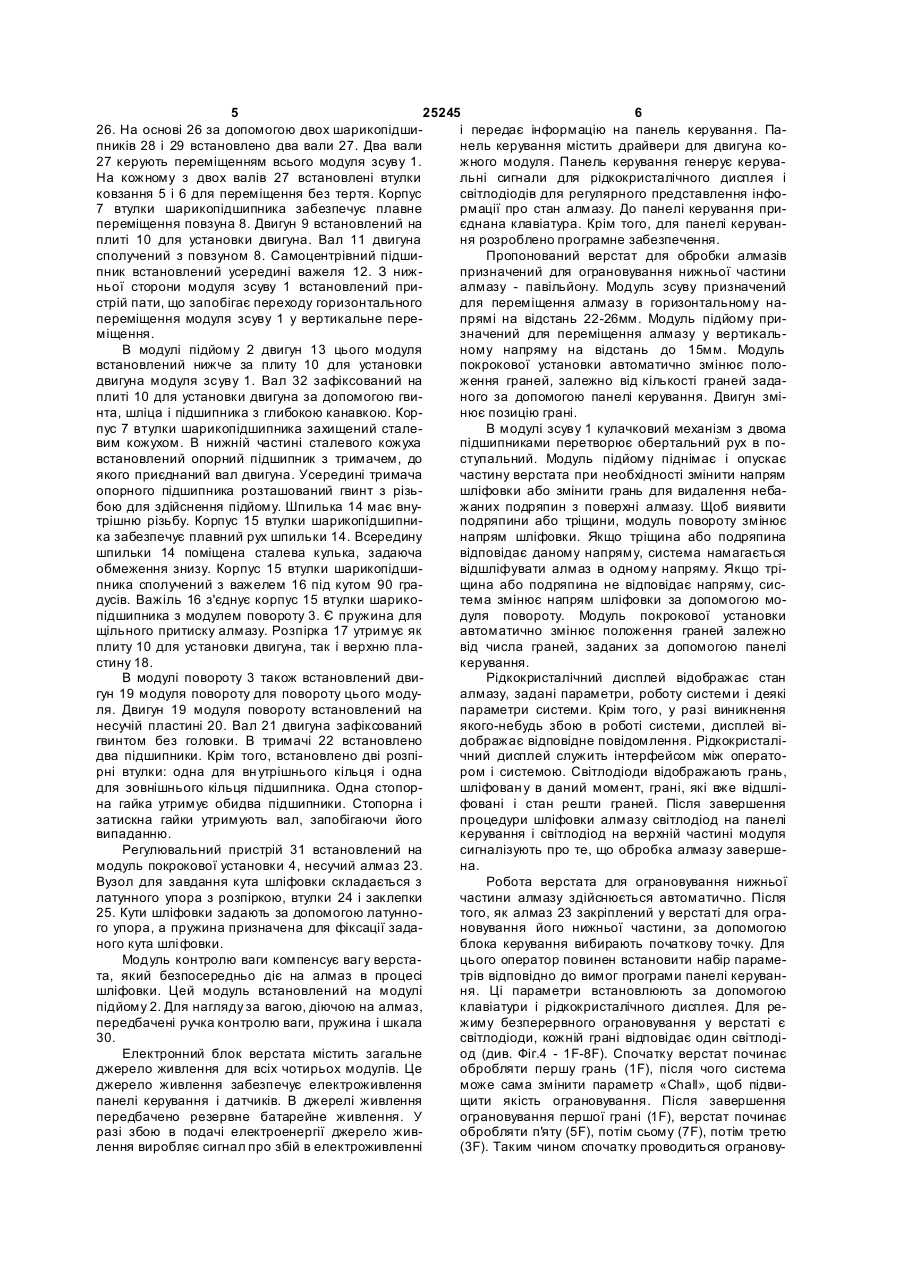
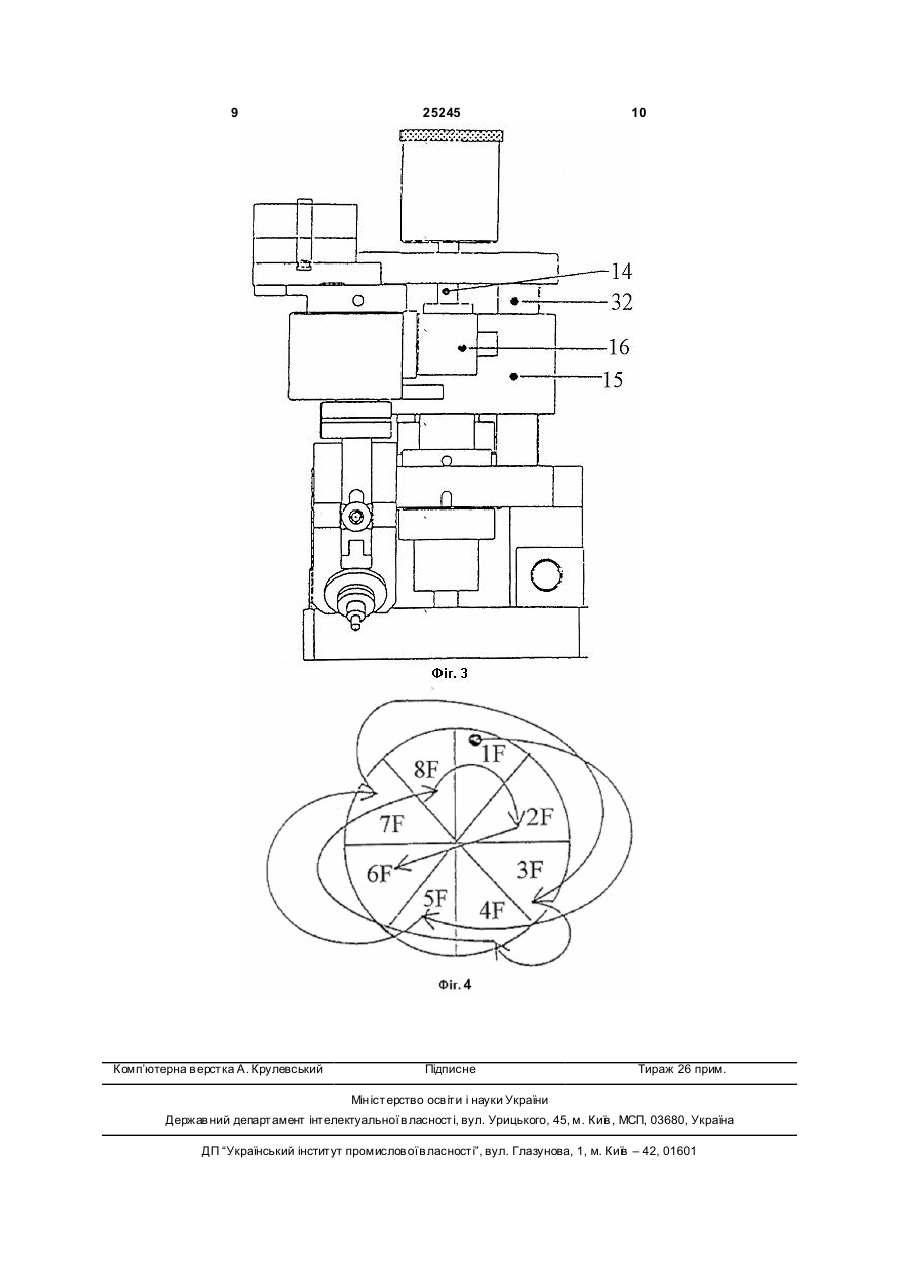
1. Верстат для ограновування нижньої частини алмазу, що містить чотири основні модулі - модуль зсуву, модуль підйому, модуль повороту і модуль покрокової установки та два додаткові модулі - модуль контролю ваги і електронний блок, при цьому модуль зсуву виконаний з можливістю переміщення алмазу в горизонтальному напрямі і містить основу, на якій за допомогою двох шарикопідшипників встановлено два вали і втулки ковзання, корпус втулки шарикопідшипника, двигун, встановлений на плиті, вал якого з'єднаний з повзуном, і самоцентруючий підшипник, розташований всередині важеля, модуль підйому виконаний з можливістю переміщення алмазу у вертикальному напрямі і містить двигун, встановлений нижче за плиту для установки двигуна модуля зсуву, вал, зафіксований на плиті для установки двигуна за допомогою гвинта, шліца і підшипника з глибокою канавкою, і корпус втулки шарикопідшипника, захи щений сталевим кожухом, при цьому в нижній частині сталевого кожуха встановлений опорний підшипник з тримачем, до якого приєднаний вал двигуна, всередині тримача опорного підшипника розташований гвинт з різьбою для здійснення підйому і шпилька з внутрішньою різьбою, крім того є корпус втулки шарикопідшипника, що забезпечує плавний рух шпильки, всередину якої поміщена сталева кулька, що задає обмеження знизу, а до корпусу втулки шарикопідшипника під кутом 90° приєднаний важіль, що з'єднує корпус втулки шарикопідшипника з модулем повороту, верстат має U 2 UA 1 3 25245 4 В основу корисної моделі поставлена задача нана клавіатура і для панелі керування розроблестворення верстата для ограновування нижньої но програмне забезпечення. частини алмазу, що дозволить значно прискорити Основа і несуча пластина служать для кріппроцес ограновування нижньої частини алмазу, лення двигуна або інших компонентів, затискач підвищити якість ограновування. для підтримки вала, вал - для відносного переміПоставлена задача вирішується тим, що версщення, корпус для втулки шарикопідшипника - для тат для ограновування нижньої частини алмазу переміщення без тертя, штифт і стрижень - для містить чотири основні модулі - модуль зсуву (1), збирання, важіль - для з'єднання двох модулів. модуль підйому (2), модуль повороту (3) і модуль Розпірна втулка встановлена між підшипниками, в покрокової установки (4) і два додаткові модулі джерелі живлення передбачено резервне батамодуль контролю ваги і електронний блок, при рейне живлення і у разі збою в подачі електроенецьому модуль зсуву (1) призначений для переміргії джерело живлення виробляє сигнал про збій в щення алмазу (23) в горизонтальному напряму на електроживленні і передає інформацію на панель відстань 22-26мм і містить основу (26), на якій за керування. Також встановлений рідкокристалічний допомогою двох шарикопідшипників (28 і 29) встадисплей для відображення стану алмазу, заданих новлено два вали (27) і втулки ковзання (5 і 6) для параметрів, роботи системи, деяких параметрів переміщення кожного вала (27) без тертя, корпус системи і відображення повідомлень. В модулі (7) втулки шарикопідшипника, який забезпечує зсуву (1) є кулачковий механізм з двома підшипниплавне переміщення повзуна (8), двигун (9), встаками модуля повороту (3), що перетворює обертановлений на плиті (10) для установки двигуна, вал льний рух в поступальний. (11) якого з'єднаний з повзуном (8), і самоцентрівВ конструкції пропонованого верстата є чотири ний підшипник, розташований усередині важеля модулі: модуль зсуву (1), модуль підйому (2), мо(12), модуль підйому (2) призначений для перемідуль повороту (3), модуль покрокової установки щення алмазу у вертикальному напряму на від(4). стань до 15мм і містить двигун (13), встановлений Вузли (1-13), що використовуються у всіх чонижче за плиту (10) для установки двигуна модуля тирьох модулях: зсуву (1), вал (32), зафіксований на плиті (10) для 1. Основа: для кріплення двигуна або інших установки двигуна за допомогою гвинта, шліца і компонентів, є частиною модуля зсуву(І); підшипника з глибокою канавкою, і корпус (7) втул2. Затискач: для підтримки вала, є частиною ки шарикопідшипника, захищений сталевим кожумодуля зсуву (1) і модуля підйому (2); хом, при цьому в нижній частині сталевого кожуха 3. Вал: для відносного переміщення, є частивстановлений опорний підшипник з тримачем, до ною модуля зсуву (1) і модуля підйому (2); якого приєднаний вал двигуна, усередині тримача 4. Корпус для втулки шарикопідшипника: для опорного підшипника розташований гвинт з різьпереміщення без тертя, є частиною модуля зсуву бою для здійснення підйому і шпилька (14) з внут(1) і модуля підйому (2); рішньою різьбою, причому є корпус (15) втулки 5. Штифт і стрижень: для зборки, є частинами шарикопідшипника, що забезпечує плавний рух модуля підйому (2) і модуля покрокової установки шпильки (14), при цьому всередину шпильки (14) (4); поміщена сталева кулька, що задає обмеження 6. Важіль: для з'єднання двох модулів, є часзнизу, а до корпусу (15) втулки шарикопідшипника тиною модуля підйому (2) і модуля повороту (3); під кутом 90° приєднаний важіль (16), що з'єднує 7. Розпірна втулка, встановлена між підшипникорпус (15) втулки шарикопідшипника з модулем ками, є частиною модуля повороту (3); повороту (3), є також пружина для щільного прити8. Пристрій пати: для обмеження межі переску алмазу і розпірка (17), що утримує як плиту міщення, є частиною модуля зсуву (1); (10) для установки двигуна, так і верхню пластину 9. Пружина: для підпружинення елементів, є (18), модуль повороту (3) містить двигун (19), частиною модуля підйому (2) і модуля покрокової встановлений на несучу пластину (20), вал (21) установки (4); двигуна, зафіксований гвинтом без головки, три10. Кульові вкладиші і шарикопідшипники для мач (22), в якому встановлено два підшипники і дві здійснення горизонтального, вертикального або розпірні втулки, одна з яких - для внутрішнього обертального руху, що є частиною модуля зсуву кільця, а друга - для зовнішнього кільця підшипни(1); ка, причому обидва підшипники утримано однією 11. Самоцентрівний підшипник для керування стопорною гайкою, модуль покрокової установки відхиленням, якщо таке відбувається, при перемі(4) призначений для розміщення алмазу (23) і авщенні, є частиною модуля зсуву (1); томатичного змінення положення граней залежно 12. Пружинний кільцевий замок: утримує підвід кількості граней, заданого за допомогою панелі шипник; керування, модуль контролю ваги містить ручку 13. Стопорна і затискна гайки: для запобігання контролю ваги, пружину і шкалу (30), а електровипадання компонентів, є частиною модуля повонний блок верстата містить загальне джерело жироту (3). влення для всіх чотирьох модулів, що забезпечує Суть корисної моделі пояснюють креслення: електроживлення панелі керування і датчиків, при Фіг.1. Вид верстата спереду. цьому панель керування містить драйвери для Фіг.2. С хема розташування вузлів верстата. двигуна кожного модуля і генерує керувальні сигФіг.3. Схема розташування вузлів верстата: нали для рідкокристалічного дисплея і світлодіодів вид збоку. для регулярного представлення інформації про Фіг.4. Напрям обертання грані. стан алмазу, причому до панелі керування приєдМодуль зсуву 1 цілком встановлений на основі 5 25245 6 26. На основі 26 за допомогою двох шарикопідшиі передає інформацію на панель керування. Папників 28 і 29 встановлено два вали 27. Два вали нель керування містить драйвери для двигуна ко27 керують переміщенням всього модуля зсуву 1. жного модуля. Панель керування генерує керуваНа кожному з двох валів 27 встановлені втулки льні сигнали для рідкокристалічного дисплея і ковзання 5 і 6 для переміщення без тертя. Корпус світлодіодів для регулярного представлення інфо7 втулки шарикопідшипника забезпечує плавне рмації про стан алмазу. До панелі керування припереміщення повзуна 8. Двигун 9 встановлений на єднана клавіатура. Крім того, для панелі керуванплиті 10 для установки двигуна. Вал 11 двигуна ня розроблено програмне забезпечення. сполучений з повзуном 8. Самоцентрівний підшиПропонований верстат для обробки алмазів пник встановлений усередині важеля 12. З нижпризначений для ограновування нижньої частини ньої сторони модуля зсуву 1 встановлений приалмазу - павільйону. Модуль зсуву призначений стрій пати, що запобігає переходу горизонтального для переміщення алмазу в горизонтальному напереміщення модуля зсуву 1 у вертикальне перепрямі на відстань 22-26мм. Модуль підйому приміщення. значений для переміщення алмазу у вертикальВ модулі підйому 2 двигун 13 цього модуля ному напряму на відстань до 15мм. Модуль встановлений нижче за плиту 10 для установки покрокової установки автоматично змінює полодвигуна модуля зсуву 1. Вал 32 зафіксований на ження граней, залежно від кількості граней задаплиті 10 для установки двигуна за допомогою гвиного за допомогою панелі керування. Двигун змінта, шліца і підшипника з глибокою канавкою. Корнює позицію грані. пус 7 втулки шарикопідшипника захищений сталеВ модулі зсуву 1 кулачковий механізм з двома вим кожухом. В нижній частині сталевого кожуха підшипниками перетворює обертальний рух в повстановлений опорний підшипник з тримачем, до ступальний. Модуль підйому піднімає і опускає якого приєднаний вал двигуна. Усередині тримача частину верстата при необхідності змінити напрям опорного підшипника розташований гвинт з різьшліфовки або змінити грань для видалення небабою для здійснення підйому. Шпилька 14 має внужаних подряпин з поверхні алмазу. Щоб виявити трішню різьбу. Корпус 15 втулки шарикопідшипниподряпини або тріщини, модуль повороту змінює ка забезпечує плавний рух шпильки 14. Всередину напрям шліфовки. Якщо тріщина або подряпина шпильки 14 поміщена сталева кулька, задаюча відповідає даному напряму, система намагається обмеження знизу. Корпус 15 втулки шарикопідшивідшліфувати алмаз в одному напряму. Якщо тріпника сполучений з важелем 16 під кутом 90 гращина або подряпина не відповідає напряму, сисдусів. Важіль 16 з'єднує корпус 15 втулки шарикотема змінює напрям шліфовки за допомогою мопідшипника з модулем повороту 3. Є пружина для дуля повороту. Модуль покрокової установки щільного притиску алмазу. Розпірка 17 утримує як автоматично змінює положення граней залежно плиту 10 для установки двигуна, так і верхню плавід числа граней, заданих за допомогою панелі стину 18. керування. В модулі повороту 3 також встановлений двиРідкокристалічний дисплей відображає стан гун 19 модуля повороту для повороту цього модуалмазу, задані параметри, роботу системи і деякі ля. Двигун 19 модуля повороту встановлений на параметри системи. Крім того, у разі виникнення несучій пластині 20. Вал 21 двигуна зафіксований якого-небудь збою в роботі системи, дисплей вігвинтом без головки. В тримачі 22 встановлено дображає відповідне повідомлення. Рідкокристалідва підшипники. Крім того, встановлено дві розпічний дисплей служить інтерфейсом між операторні втулки: одна для вн утрішнього кільця і одна ром і системою. Світлодіоди відображають грань, для зовнішнього кільця підшипника. Одна стопоршліфован у в даний момент, грані, які вже відшліна гайка утримує обидва підшипники. Стопорна і фовані і стан решти граней. Після завершення затискна гайки утримують вал, запобігаючи його процедури шліфовки алмазу світлодіод на панелі випаданню. керування і світлодіод на верхній частині модуля Регулювальний пристрій 31 встановлений на сигналізують про те, що обробка алмазу завершемодуль покрокової установки 4, несучий алмаз 23. на. Вузол для завдання кута шліфовки складається з Робота верстата для ограновування нижньої латунного упора з розпіркою, втулки 24 і заклепки частини алмазу здійснюється автоматично. Після 25. Кути шліфовки задають за допомогою латуннотого, як алмаз 23 закріплений у верстаті для ограго упора, а пружина призначена для фіксації задановування його нижньої частини, за допомогою ного кута шлі фовки. блока керування вибирають початкову точку. Для Модуль контролю ваги компенсує вагу верстацього оператор повинен встановити набір парамета, який безпосередньо діє на алмаз в процесі трів відповідно до вимог програми панелі керуваншліфовки. Цей модуль встановлений на модулі ня. Ці параметри встановлюють за допомогою підйому 2. Для нагляду за вагою, діючою на алмаз, клавіатури і рідкокристалічного дисплея. Для репередбачені ручка контролю ваги, пружина і шкала жиму безперервного ограновування у верстаті є 30. світлодіоди, кожній грані відповідає один світлодіЕлектронний блок верстата містить загальне од (див. Фіг.4 - 1F-8F). Спочатку верстат починає джерело живлення для всіх чотирьох модулів. Це обробляти першу грань (1F), після чого система джерело живлення забезпечує електроживлення може сама змінити параметр «Chall», щоб підвипанелі керування і датчиків. В джерелі живлення щити якість ограновування. Після завершення передбачено резервне батарейне живлення. У ограновування першої грані (1F), верстат починає разі збою в подачі електроенергії джерело живобробляти п'яту (5F), потім сьому (7F), потім третю лення виробляє сигнал про збій в електроживленні (3F). Таким чином спочатку проводиться огранову 7 25245 8 вання непарних граней, потім парних. Значення до 60 секунд. Вибір значення для цього параметра параметра «Chall» можна задати в діапазоні від 1 залежить від типу і розміру алмазу. 9 Комп’ютерна в ерстка А. Крулевський 25245 Підписне 10 Тираж 26 прим. Міністерство осв іт и і науки України Держав ний департамент інтелектуальної в ласності, вул. Урицького, 45, м. Київ , МСП, 03680, Україна ДП “Український інститут промислов ої в ласності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMachine tool for cutting lower part of diamond
Автори англійськоюBondarenko Serhii Viktorovych
Назва патенту російськоюСтанок для огранки нижней части алмаза
Автори російськоюБондаренко Сергей Викторович
МПК / Мітки
МПК: B24B 9/06
Мітки: ограновування, верстат, частини, алмазу, нижньої
Код посилання
<a href="https://ua.patents.su/5-25245-verstat-dlya-ogranovuvannya-nizhno-chastini-almazu.html" target="_blank" rel="follow" title="База патентів України">Верстат для ограновування нижньої частини алмазу</a>
Верстат для накладання стрічкової ізоляції на кільцеву і прямолінійну частини виробу
Номер патенту: 7872
Опубліковано: 26.12.1995
Автори: Нікольніков Віктор Іванович, Меснянкин Іван Васильович, Левченко Генадій Петрович, Портянкин Анатолій Михайлович
МПК: H02K 15/00, H01F 41/06
Мітки: кільцеву, накладання, верстат, стрічкової, виробу, частини, ізоляції, прямолінійну
Формула / Реферат:
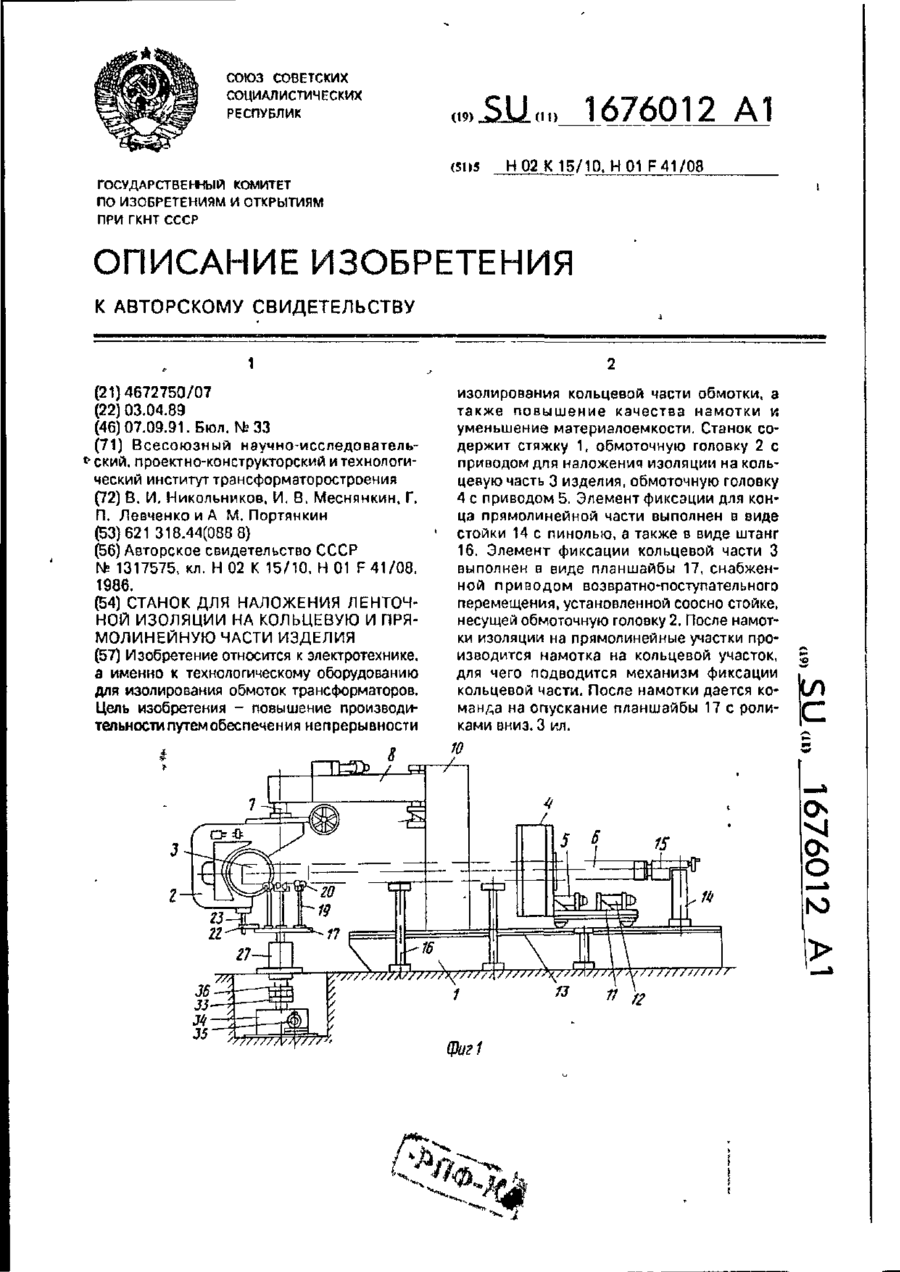
Станок для наложения ленточной изоляции на кольцевую и прямолинейную части изделия, содержащий колонну с шарнирно и консольно закрепленной на ней балкой, имеющую возможность поворота в горизонтальной плоскости, обмоточную головку, закрепленную на стойке, установленную в подшипниках на балке элементы фиксации кольцевой и прямолинейной частей изделия, отличающийся тем, что, с целью повышения производительности путем обеспечения...
Верстат для проточування циліндричної частини вала і прорізання різі
Номер патенту: 62860
Опубліковано: 15.12.2003
Автор: Піддубський Андрій Іванович
МПК: B23B 5/08
Мітки: верстат, прорізання, проточування, циліндричної, частини, різі, вала
Формула / Реферат:
1. Верстат для проточування циліндричної частини вала і прорізання різі, що містить привід, привідну головку, різцетримальну головку, опорну головку, який відрізняється тим, що привідна головка оснащена одноступінчастим редуктором, ведуча шестірня якого зв'язана з приводом, а ведена - з передатною втулкою, з'єднаною з планшайбою, оснащеною напрямними, які взаємодіють з виконаними у вигляді плоских кілець різцетримальною і опорною головками, а...
Повзун нижньої частини опори ковзання
Номер патенту: 11169
Опубліковано: 25.12.1996
Автор: Лентце Курт
МПК: B61F 5/02
Мітки: нижньої, ковзання, опори, частини, повзун
Формула / Реферат:
(57) Ползун нижней части опоры скольжения кузова рельсового транспортного средства, содержащий выполненные в его верхней части горизонтальную плоскую поверхность скольжения и смазочные канавки, отличающийся тем, что смазочные канавки выполнены горизонтальными и прямолинейными и расположены параллельно друг к другу под углом 45° к продольной оси ползуна с возможностью перекрытия областей действия друг друга в направлении движения ползуна...
Спосіб хірургічного лікування гематометри, гематосальпінксів невеликих розмірів та гематокольпоса верхньої третини піхви при аплазії її нижньої частини
Номер патенту: 14765
Опубліковано: 15.05.2006
Автори: Вовк Ірина Борисівна, Кондратюк Валентина Костянтинівна, Корнацька Алла Григорівна, Гаврилова Ірина Всеволодівна
МПК: A61B 17/42
Мітки: третини, верхньої, гематометри, хірургічного, піхви, частини, розмірів, спосіб, нижньої, гематосальпінксів, невеликих, гематокольпоса, лікування, аплазії
Формула / Реферат:
Спосіб хірургічного лікування гематометри, гематосальпінксів невеликих розмірів та гематокольпоса верхньої третини піхви при аплазії її нижньої частини шляхом евакуації вмісту гематокольпоса, гематометри та гематосальпінксів невеликих розмірів після розтину верхньої третини піхви через створений між сечовим міхуром та прямою кишкою канал, який відрізняється тим, що проводять формування двох третіх нижньої частини піхви з П-подібних клаптів...
Склад на основі алмазу
Номер патенту: 4941
Опубліковано: 15.02.2005
Автори: Славинський Юрій Станиславович, Богатирьова Галина Павлівна, Новіков Микола Васильович, Полторацький Володимир Григорович, Нікітін Юрій Іванович, Падалко Володимир Іванович
МПК: C09G 1/00
Формула / Реферат:
1. Склад на основі алмазу, переважно для полірування, що містить алмазний порошок і наповнювач, який відрізняється тим, що як алмазний порошок він містить ультрадисперсний порошок алмазу, а як наповнювач - ультрадисперсний порошок на основі оксиду алюмінію або ультрадисперсний порошок на основі оксиду цирконію, причому величина питомої поверхні ультрадисперсного порошку алмазу у 4-20 разів більша, ніж величина питомої поверхні...
Попередній патент: Шихта для виробництва залізорудних котунів
Наступний патент: Спосіб обробки алмазів
Випадковий патент: Роторний сільськогосподарський комбайн