Пристрій для понадглибинного геозондування
Номер патенту: 32787
Опубліковано: 15.02.2001
Автори: Писаренко Тетяна Василівна, Ващенко Володимир Миколайович


Формула / Реферат
1. Пристрій для понадглибинного геозондування, що має автономний теплогенератор, який відрізняється тим, що автономний теплогенератор виконано у вигляді хімічного або ядерного реактора на швидких нейтронах з радіальне розташованими в сферичній корпус-оболонці тепловиділяючими елементами, які з'єднані з робочою поверхнею корпус-оболонки тепловими трубами.
2. Пристрій по п.1, який відрізняється тим, що він містить двигун, який використовує теплову енергію.
Текст
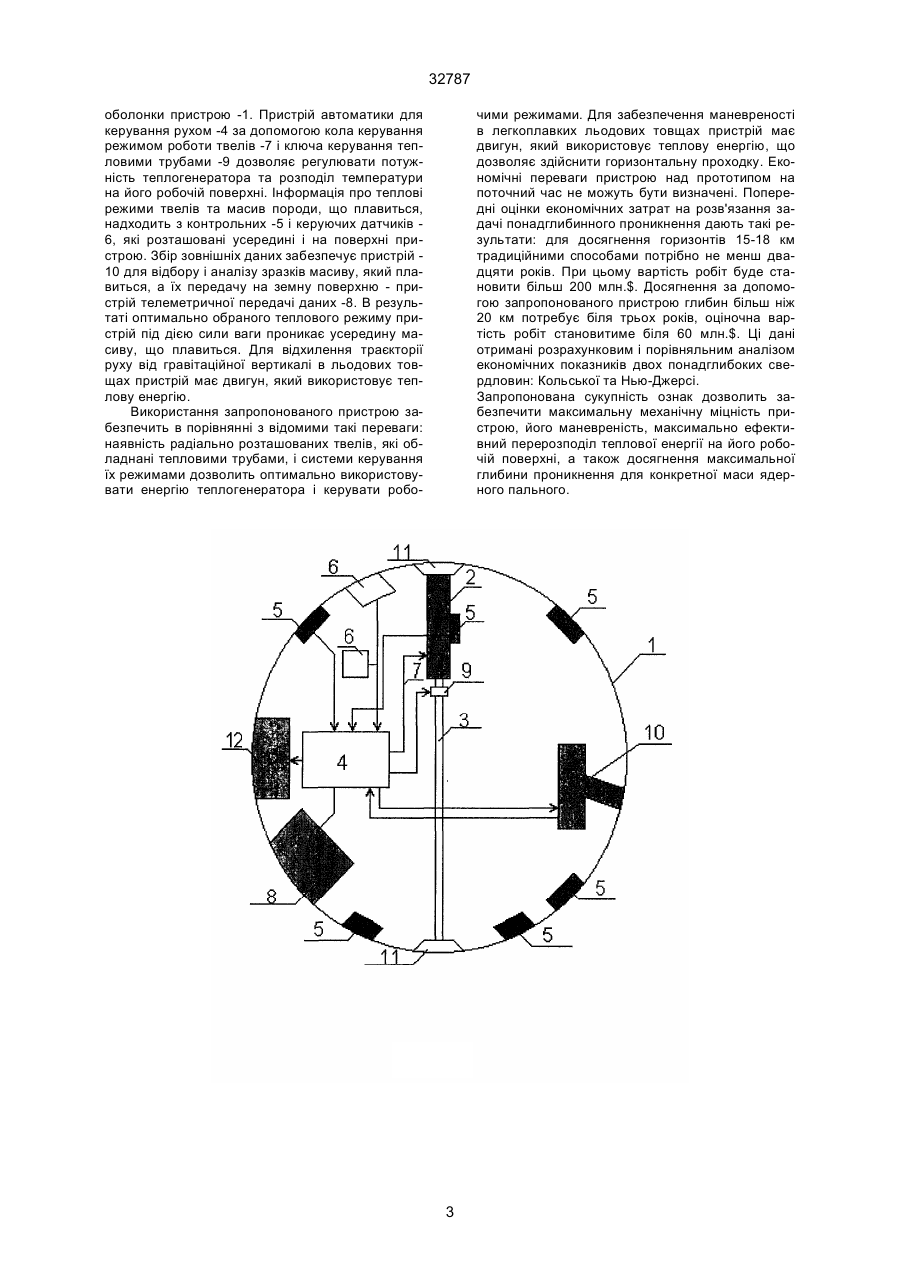
1. Пристрій для понадглибинного геозондування, що має автономний теплогенератор, який відрізняється тим, що автономний теплогенера 32787 Внаслідок процесу плавлення пристрій рухається в рідкому шарі розплавлених порід під дією сили ваги. Запропонований пристрій є сферичним ядерним реактором з симетрично (радіально) розташованими в ньому твелами. Така форма корпусу, по-перше, забезпечує максимально можливу механічну міцність конструкції і, по-друге, дозволяє регулювати та перерозподіляти температурний режим усередині та на поверхні пристрою, що забезпечує можливість його маневрування під час руху, дозволяючи при необхідності відхилятися від радіального напрямку до центру Землі. Швидкість руху пристрою, а, отже, і час досягнення заданої глибини, залежать від величини енергії, яка підводиться до забою, та її питомої густини. Пропонується використовувати малогабаритний ядерний реактор на швидких нейтронах, який спроможний підтримувати високу потужність на протязі тривалого часу. Нехтуючи втратами тепла на перегрів шару розплаву та розсіювання в твердій породі, можна оцінити швидкість руху пристрою по формулі: вання і самоотруювання. Отруєння реактора відбувається, головним чином, за рахунок ізотопу ксенона-135, який має найбільший переріз поглинання - 2,6 •106 бар. Проте, такий великий переріз поглинання у ксенона-135 спостерігається лише для теплових нейтронів, швидкі ж нейтрони поглинаються ксеноном-135 мало. При стаціонарному режимі роботи ядерного реактора на швидких нейтронах отруєння ксеноном практично не впливає на його реактивність. Стійкість реактора в перехідному режимі його роботи забезпечується конструкцією системи регулювання. Вплив шлаків на шкідливе поглинання нейтронів є незначним в порівнянні з його отруєнням ксеноном. Пристрій для понадглибинного геозондування містить теплові труби з метою забезпечення швидкої передачі тепла від твелів до оболонки корпусу з мінімальними тепловими втратами. Пристрій для понадглибинного геозондування містить також тепловий двигун з метою забезпечення горизонтального руху в льодових товщах. Вода, яка утворюється при плавленні льоду, поступає в спеціальну секцію водовідборного пристрою, де вона нагрівається до температури пароутворення. При цьому енергія теплогенератора розподіляється на плавлення льоду і пароутворення. Відношення теплоємностей даних процесів знаходиться в межах 8 : 10. Нехтуючи утратами на розсіювання тепла в льодовому масиві, швидкість плавлення льоду, яка є граничною для швидкості руху пристрою, можна оцінити за формулою (1). Для теплогенератора потужністю 100 МВт швидкість проходки перевищує значення 10 м/год. Перегріта пара приводить в дію двигун, що дозволяє здійснити рух пристрою в горизонтальному напрямку. На кресленні показана схема пристрою. Пристрій має: сферичну корпус-оболонку -1 з тугоплавких конструкційних матеріалів; тепловиділяючі елементи теплогенератора -2; теплові труби -3 (на кресленні зображені тільки один твел і одна теплова труба, оскільки повна їх кількість визначається енергоємністю та потужністю експерименту, який планується); пристрій автоматики для керування рухом -4; контрольні датчики зовнішніх умов -5, які працюють по принципу бар'єрних реакцій на тиск, температуру, густину розплаву, швидкість проникнення та ін.; керуючі датчики -6 та коло керуванням режимом роботи твелів -7; пристрій телеметричної передачі даних -8; ключі керуванням тепловими трубами -9 з метою перерозподілу температури на робочій поверхні пристрою; пристрій для відбору і аналізу зразків масиву, що плавиться -10; теплоконтактні елементи -11 для передачі тепла від твелів і теплових труб до робочої поверхні пристрою; тепловий двигун -12. Пристрій працює так: усередині сферичної корпус-оболонки - 1 радіально розташовані тепловиділяючі елементи -2. Кількість твелів визначається потужністю та енергоємністю планованого експерименту, які повинні бути достатніми для забезпечення такої температури робочої поверхні пристрою, що перевищує температуру плавлення оточуючого середовища. Теплова енергія твелів за допомогою теплових труб -3 через теплоконтактні елементи -11 надходить до корпус де N - потужність реактора, R - радіус пристрою, с - питома теплоємність породи, DТ - температурний інтервал між вихідною температурою породи та її температурою плавлення, L - питома теплота плавлення, r - густина породи. Тоді час роботи пристрою, необхідний для досягнення заданої глибини Н, визначається формулою: Використовуючи уран-235 як ядерне пальне, при згорянні якого виділяється енергія, що дорівнює 18,5-10 3 МВт.год, можна оцінити необхідну кількість пального. Так, припускаючи N =100МВт, R =1м, с =1,2·.103 Дж/кг.·град, DТ=1500°С L =800•103Дж/кг, r= 3.·103кг/м3, H=3.·104 м, отримаємо, що для сформульованих умов швидкість руху пристрою в розплавленій породі оцінюється величиною 10-3 м/сек, що на 1-2 порядки більше швидкості традиційних методів буріння, максимально досягнута глибина яких при цьому обмежується 12-15 км. Час, необхідний для проходження пристроєм Земної кори завтовшки 30 км з такою швидкістю, складає близько 9000 годин. Таким чином, для забезпечення ядерним реактором на швидких нейтронах потужності 100 МВт на протязі усієї кампанії потрібно згоряння 50 кг урану-235, що відповідає можливості сучасних малогабаритних реакторів. Доцільність вибору реактора на швидких нейтронах обумовлена також проблемою стійкості його реактивності. Тривала кампанія експлуатації реактора в абсолютно герметичному просторі потребує ураховувати можливість його зашлакову 2 32787 оболонки пристрою -1. Пристрій автоматики для керування рухом -4 за допомогою кола керування режимом роботи твелів -7 і ключа керування тепловими трубами -9 дозволяє регулювати потужність теплогенератора та розподіл температури на його робочій поверхні. Інформація про теплові режими твелів та масив породи, що плавиться, надходить з контрольних -5 і керуючих датчиків 6, які розташовані усередині і на поверхні пристрою. Збір зовнішніх даних забезпечує пристрій 10 для відбору і аналізу зразків масиву, який плавиться, а їх передачу на земну поверхню - пристрій телеметричної передачі даних -8. В результаті оптимально обраного теплового режиму пристрій під дією сили ваги проникає усередину масиву, що плавиться. Для відхилення траєкторії руху від гравітаційної вертикалі в льодових товщах пристрій має двигун, який використовує теплову енергію. Використання запропонованого пристрою забезпечить в порівнянні з відомими такі переваги: наявність радіально розташованих твелів, які обладнані тепловими трубами, і системи керування їх режимами дозволить оптимально використовувати енергію теплогенератора і керувати робо чими режимами. Для забезпечення маневреності в легкоплавких льодових товщах пристрій має двигун, який використовує теплову енергію, що дозволяє здійснити горизонтальну проходку. Економічні переваги пристрою над прототипом на поточний час не можуть бути визначені. Попередні оцінки економічних затрат на розв'язання задачі понадглибинного проникнення дають такі результати: для досягнення горизонтів 15-18 км традиційними способами потрібно не менш двадцяти років. При цьому вартість робіт буде становити більш 200 млн.$. Досягнення за допомогою запропонованого пристрою глибин більш ніж 20 км потребує біля трьох років, оціночна вартість робіт становитиме біля 60 млн.$. Ці дані отримані розрахунковим і порівняльним аналізом економічних показників двох понадглибоких свердловин: Кольської та Нью-Джерсі. Запропонована сукупність ознак дозволить забезпечити максимальну механічну міцність пристрою, його маневреність, максимально ефективний перерозподіл теплової енергії на його робочій поверхні, а також досягнення максимальної глибини проникнення для конкретної маси ядерного пального. 3 32787 ____________________________________________ ДП “Український інститут промислової власності” (Укрпатент) Бульв. Лесі Українки, 26, Київ, 01133, Україна (044) 254-42-30, 295-61-97 __________________________________________________________ Підписано до друку ________ 2001 р. Формат 60х84 1/8. Обсяг ______ обл.-вид.арк. Тираж 50 прим. Зам._______ ____________________________________________________________ УкрІНТЕІ Вул. Горького, 180, Київ, 03680 МСП, Україна (044) 268-25-22 ___________________________________________________________ 4 32787 5
ДивитисяДодаткова інформація
Назва патенту англійськоюAppliance for super-deep geo-probing
Автори англійськоюVaschenko Volodymyr Mykolaiovych, Pysarenko Tetiana Vasylivna
Назва патенту російськоюУстройство для сверхглубокого геозондирования
Автори російськоюВащенко Владимир Николаевич, Писаренко Татьяна Васильевна
МПК / Мітки
МПК: E21B 7/14
Мітки: понадглибинного, пристрій, геозондування
Код посилання
<a href="https://ua.patents.su/5-32787-pristrijj-dlya-ponadglibinnogo-geozonduvannya.html" target="_blank" rel="follow" title="База патентів України">Пристрій для понадглибинного геозондування</a>
Пристрій для виключення подачі палива в двигун внутрішнього згорання
Номер патенту: 27120
Опубліковано: 28.02.2000
Автор: Крамарєв Григорій Миколайович
МПК: F02M 3/00
Мітки: згорання, палива, внутрішнього, двигун, пристрій, подачі, виключення
Формула / Реферат:
Пристрій для виключення подачі палива в двигун внутрішнього згоряння, який складається з корпусу, в якому виконаний поздовжній наскрізний отвір і поперечний канал холостого ходу, штока, який встановлений в отворі корпусу і з'єднаний одним кінцем із підпружиненою діафрагмою, що розміщена в камері і ділить останню на герметичну і атмосферну зони, який відрізняється тим, що в нижній частині штока виконаний поздовжній паз.
Спосіб контролю герметичності оболонок тепловидільних елементів ядерного енергетичного реактора і пристрій для його здійснення
Номер патенту: 30835
Опубліковано: 15.12.2000
Автори: Максимов Максим Вітальович, Білей Данко Васильович, Назаренко Аскольд Федорович, Давиденко Леонід Андрійович, Покора Ігор Миколайович
МПК: G01N 29/04
Мітки: енергетичного, контролю, пристрій, герметичності, спосіб, реактора, тепловидільних, елементів, здійснення, ядерного, оболонок
Текст:
...герметичності оболонок тепловидільних елементів ядерного енергетичного реактора і, таким чином, забезпечити експресаналіз герметичності оболонок, спростити обробку вимірювань та зменшити енергетичні витрати. В основу винаходу також поставлено завдання створити такий пристрій для здійснення запропонованого способу, у якому нова конструкція і нові зв'язки дозволяють зменшити енергетичні затрати та скоротити час проведення контролю....
Пристрій для абразивної обробки замкнених внутрішніх контурів деталей
Номер патенту: 30991
Опубліковано: 15.12.2000
Автори: Крук Сергій Григорович, Крук Людмила Олександрівна, Халід Абу Ель Хусейн, Петраков Юрій Володимирович
МПК: B24B 21/00
Мітки: абразивної, деталей, замкнених, обробки, контурів, внутрішніх, пристрій
Текст:
...ролик 6 передає рух абразивній стрічці 8, котра охоплює притиск 4 і ведений ролик 7 та натягується натяжним механізмом 9. Крім того, обертання вала 11 двигуна 12 через шків 15, кліноремінну передачу 14 передається на несучий шків 13. Таким чином, ролики 6 і 7 разом зі стрічкою 8 обертаються навколо притиску 4, котрий взаємодіє з поверхнею деталі 25, що має можливість самовстановлення завдяки пружному закріпленню стільця 26 на верхній...
Пристрій для відбору проб рідини
Номер патенту: 30117
Опубліковано: 15.11.2000
Автори: Руденко Юрій Степанович, Надворний Микола Миколайович
МПК: G01N 1/16
Мітки: пристрій, відбору, рідини, проб
Текст:
...для оптимальної установленості корпусу. За командою двигун 6 починає обертати котушку 5, з якої розмотується трос 10, який має фіксовану довжину та прикріплений до пробовідбірної судини 4. На цій же котушці знаходиться й трос 11, з'єднаний через пружинний механізм 12 з корком 13, який закриває пробовідбірну судину 4. При обертанні двигуна 6 котушка 5 змотує троси 10 та 11. Троси відрізняються між собою на величину відрізку, який дорівнює...
Пристрій для обробки монокристалів

Номер патенту: 30725
Опубліковано: 15.12.2000
Автори: Горілецький Валентин Іванович, Єпіфанов Юрій Михайлович, Кузнецов Валентин Анатолійович, Криворучко Володимир Григорович
МПК: B24D 5/00, C30B 33/00
Мітки: обробки, монокристалів, пристрій
Формула / Реферат:
Пристрій для обробки монокристалів, що вміщує кристалотримач, рухому стійку з обертовими роликами, на які натягнена ріжуча нитка, резервуар з робочим розчином, приводи обертання та подачи нитки, блок керування, одним з виходів з'єднаний з приводом подачи нитки, та датчик натягу нитки, з'єднаний з входом блока керування, який відрізняється тим, що верхній ролик, який знаходиться на протилежному боці від кристалотримача, встановлен на рухливій...
Попередній патент: Спосіб очищення стічних вод від важких металів
Наступний патент: Телефон-іграшка
Випадковий патент: Спосіб виготовлення підковоподібних пружин