Пристрій бокового направлення штаби на рольганзі
Номер патенту: 38304
Опубліковано: 15.05.2001
Автори: Тіщенко Андрій Миколайович, Єршов Валентин Олександрович, Осокін Анатолій Андрійович
Текст
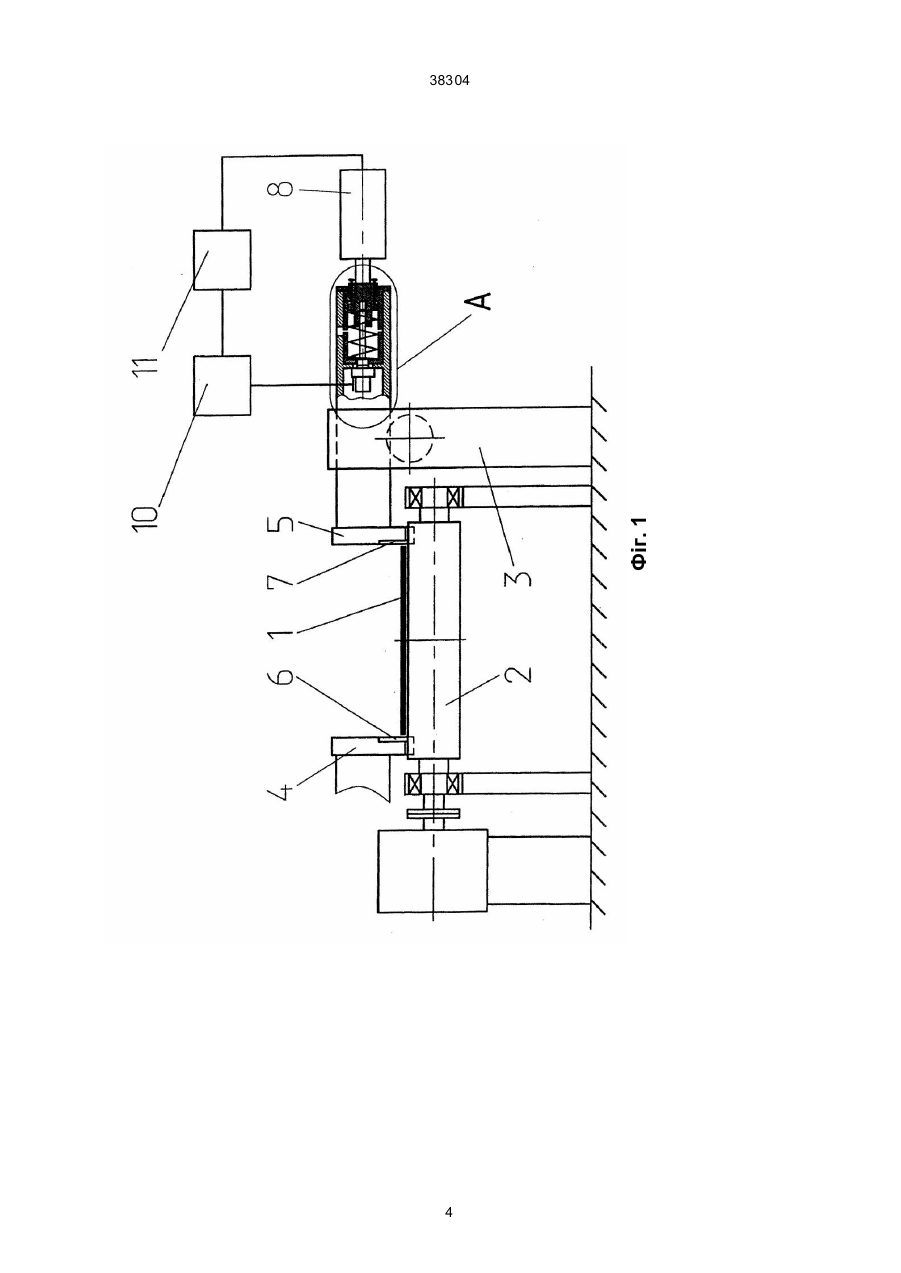
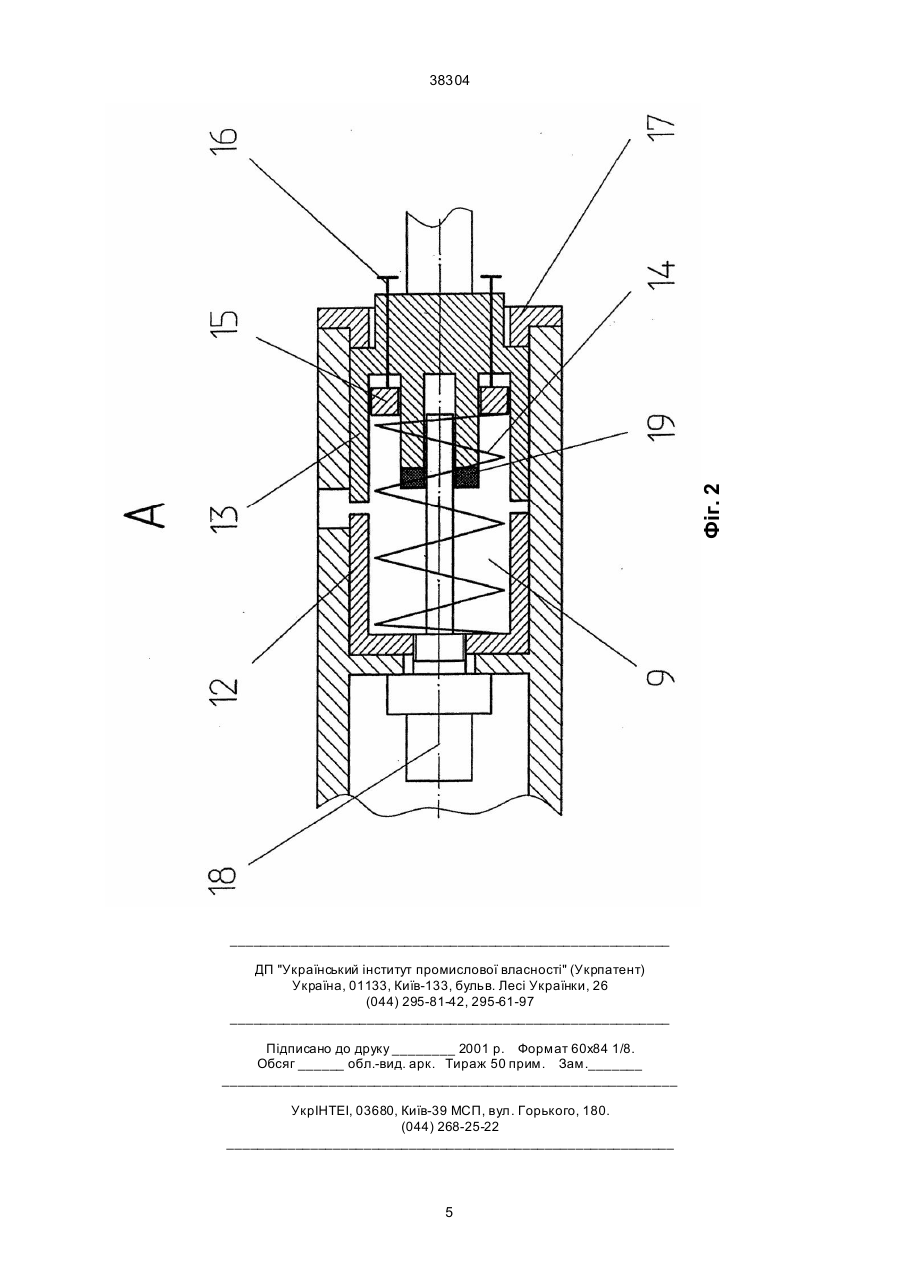
Пристрій бокового направлення штаби на рольганзі, до складу якого входить корпус з розміщеними в ньому напрямними лінійками та привід їх переміщення, з'єднаний з керуючим пристроєм, що складається з блоку реєстрації сигналів та електронного блоку порівняння зареєстрованих 38304 Одержаний таким чином сигнал це коливання з визначеною амплітудою. Коли зусилля натиску напрямних лінійок на штабу, що проходить повз них. дуже велике, що призводить до більшого зносу, тоді і амплітуда коливання більша, ніж та, що припускає попередньо задане значення. Порівняння заданих та фактичних значень відбувається в керуючому пристрої у електронному блоці порівняння. Зменшення зусилля натиску відбувається, коли сигнал від електронного блоку подається на серводвигун, який відводить напрямні лінійки назад, доки не буде досягнуте попередньо задане зусилля тиску. Така конструкція дозволяє притискати напрямні лінійки до штаби з мінімально необхідним зусиллям тертя та повністю автоматизувати процес встановлювання напрямних лінійок. Однак, автоматикою не можливо відрізнити корпусний шум, що виникає від тертя штаби по міжроликових проводках, по роликах рольгангу від корисного сигналу. Чутливий елемент приймача корпусного шуму (датчик прискорення) розташовано у безпосередній близькості від гарячої штаби, що р ухається, в зоні дії високих температур, пару, води та інше. Крім того, для різних марок транспортуємих матеріалів, товщин та швидкостей, шум відрізняється, що вимагає перестроєння параметрів наладки. Все це впливає на автоматичне регулювання, напрямна лінійка часто виходить з ладу, що призводить до зниження стійкості напрямних лінійок та якості штаби, що спрямовується. Таким чином, недоліком описаного рішення залишається низька стійкість напрямних лінійок, а також низька якість країв штаби, що спрямовується. До основи винаходу поставлене завдання поліпшити якість штаби та підвищити стійкість напрямних лінійок. Це завдання вирішується за рахунок технічного результату, який полягає в більш чіткому регулюванні зусилля натиску напрямних лінійок на штабу. Для досягнення вище згаданого технічного результату у пристрої бокового направлення штаби на рольганзі, до складу якого входить корпус з розташованими у ньому напрямними лінійками та привід їх переміщення, з'єднаний з керуючим пристроєм, який складається з блоку реєстраці сигналів та електронного блоку порівняння зареєстрованих сигналів з попередньо заданим сигналом та видачі регулюючого сигналу, відповідно винаходу блок реєстраці сигналів виконано у вигляді пружини стиску, яку встановлено у стакан, що розміщений у напрямній лінійці та оснащений датчиком лінійних переміщень, і кришки, котра поєднана з приводом переміщення лінійки та обладнана сенсором, який встановлено концентрично стержню датчика лінійних переміщень, а згадана пружина стиску обладнана засобом регулювання затягнення. В результаті порівняльного аналізу запропонованого технічного рішення з прототипом встановлено, що вони мають загальні технічні ознаки: - корпус з розташованими у ньому напрямними лінійками; - привід їх переміщення; - керуючий пристрій, який складається з блоку реєстрації сигналів із попередньо заданим сигналом на видачі регулюючого сигналу; і відмінні ознаки: - блок реєстрації сигналів виконано у ви гляді пружини стиску та кришки; - пружина стиску встановлена у стакан, що розміщений у напрямній лінійці та оснащений датчиком лінійних переміщень. - кришка з'єднана з приводом переміщення лінійки та обладнана сенсором, який встановлено концентрично стержню датчика лінійних переміщень; - датчик лінійних переміщень, пов'язаний з електронним блоком порівняння зареєстрованих сигналів із попередньо заданим сигналом та видані регулюючого сигналу; - пружина стиску обладнана засобом регулювання затягнення. Таким чином, конструкція пристрою бокового направлення штаби на рольганзі, що пропонується, має нові конструктивні елементи, нові зв'язки вузлів та деталей і нові форми виконання елементів та вузлів. Між сукупністю суттєви х ознак запропонованого рішення та завданим технічним результатом є причинно - наслідковий зв'язок. Завдяки використанню регулюючого сигналу, як електричного, який виникає при взаємодії датчика лінійних переміщень і сенсора, котрим обладнано керуючий пристрій, досягається точне регулюванням керуючого сигналу, що подається на привід напрямної лінійки, забезпечивши притиснення й до штаби, що спрямовується, з невеликій! зусиллям, якого достатньо для точного її спрямування, проте, щоб не ушкодити бокові краї штаби та бокові стінки лінійки, що призводить до поліпшення якості штаби, а також підвищення стійкості бокових напрямних. Завдяки тому, що пружина стиску обладнана засобом регулювання її затягнення, виникає можливість додаткового точного регулювання зусилля притиснення бокової напрямної лінійки до країв штаби, що також позитивно позначається на якості штаби, що спрямовується і стійкості напрямних лінійок. Таким чином, завдяки точному регулюванню зусилля притиснення напрямної лінійки до штаби, поліпшується якість штаби, що спрямовується, а також підвищується стійкість напрямних лінійок. Виключення з зазначеної сукупності відмінних ознак хоча б однієї не забезпечує досягнення технічного результату. Технічне рішення має винахідницький рівень тому, що запропоноване виконання пристрою бокового направлення штаби на рольганзі явним чином не виходить з рівня техніки. Запропоноване не відомо з рівня техніки, тому воно є новим. Запропоноване рішення промислове застосоване, виготовлення його в умовах машинобудівного заводу, наприклад, AT "HKM3" - можливо. З використанням запропонованого технічного рішення розроблено технічний проект стану 2000 г.п. AT «Северсталь», м. Череповець. 2 38304 Таким чином, запропонованому рішенню може бути надана правова охорона, тому, що воно є новим, має винахідницький рівень і промислове застосування. Технічна сутність запропонованого рішення пояснюється кресленнями, на яких зображено: на фіг. 1 - загальний вигляд пристрою на фіг. 2 - місто А на фиг. 1. Пристрій бокового направлення штаби 1 на рольганзі 2 складається з корпусу 3, в якому розташовані напрямні лінійки 4, 5 з контактуючими планками 6,7, що змінюються. Напрямні лінійки 4, 5 мають привід їх переміщення 8. Крім того, пристрій оснащено керуючим пристроєм, до складу якого входить блок реєстрації сигналу 9, електронний блок 10 та керуюча обчислювальна машина 11 (КОМ). Блок реєстрації сигналу виконано у вигляді пружини стиску 14, яку встановлено в стакан 12, розташованого у розточці напрямної лінійки, наприклад, 5, з рухомою кришкою 13, усередині котрих розміщена пружина 14. Між стаканом 12 та рухомою кришкою 13 існує деякий зазор, близько 1мм. Усередині рухомої кришки 13 встановлено шайбу 15 з можливістю регулювання її положення відносно рухомої критики 13, наприклад, за допомогою гвинтів 16. Рухома кришка 13 з'єднана з приводом переміщення 8, наприклад, гідравлічним, напрямної лінійки 5. Рухома кришка 13 контактує з обмежувачем 17. Шайба 15 з гвинтами 16 та обмежувач 17 являють собою засіб попереднього затягнення пружини 14. На стакані 12 напрямної лінійки 5 закріплено датчик лінійних переміщень 18, а в торці рухомої кришки 13 концентрично чутливому стержню датчика лінійних переміщень 18 встановлено сенсор 19. Пристрій бокового направлення штаби на рольганзі працює так. Штаба 1 транспортується по роликах рольганга 2 зі швидкістю 15 м/с і більше. Ширина штаби по всій довжині відрізняється від заданої, тому не існує заздалегідь обраного оптимального встановлення лінійок 4,5. Вони регулюються у процесі змотування одного рулону штаби 1 у моталці так, щоб при змотуванні у моталці забезпечити таке бокове направлення штаби 1, яке б сприяло змотуванню рулону з малою, близькою до 0, телескопічністю, хоча б з одного боку. При цьому регулювання зусилля притиснення напрямної лінійки 5 до бокової поверхні штаби 1 повинно бути таким, щоб між штабою 1, що транспортується, та контактними планками 6, 7 виникла мінімально необхідна сила тертя. Приводом переміщення 8 напрямні лі нійки 4, 5 встановлюють до зіткнення контактних планок 6, 7 зі штабою 1, внаслідок чого, виникає зусилля, яке додатково стискає на деяку величину вже попередньо стиснуту пружину 14. Додаткове стиснення пружини 14 супроводжується взаємним поступовим переміщенням датчика лінійних переміщень 18, сенсора 19, якого концентричне встановлено відносно стержня датчика лінійних переміщень 18. Взаємне переміщення датчика лінійних переміщень 18 і сенсора 19 викликає електричний сигнал на виході датчика, причому датчик лінійних переміщень 18 визначає величину стиску пружини 14 з точністю до 0,01 мм. Електричний сигнал з датчика лінійних переміщень 18 надходить до електронного блоку 10, де обробляється, щоб можна було його запровадити до КОМ 11. Електричний сигнал, що надходить до КОМ 11, безперервно порівнюється з попередньо заданим значенням переміщення, яке відповідає максимально допустимому зусиллю притиску напрямних лінійок 4, 5 до штаби 1. При досягненні або перевищенні заданого значення переміщення з КОМ 11 подається сигнал на привід переміщення 8, котрий відсуває лінійку 5. При необхідності величину попереднього затягнення пружини 14 можна регулювати за допомогою гвинтів 16, які контактують із шайбою 15. Причому щонайбільша величина попереднього затягнення пружини 14 відповідає щонайбільшому зусиллю притиснення напрямних лінійок 4, 5 до штаби 1 при даному попередньо заданому значенні переміщення. При центруванні штаби з великою серповидністю, коли необхідно "зажати" штабу 1 між напрямними лінійками 4, 5, щоб якось змінити тедескопічність рулону, напрямні лінійки переходять до регулювання приводу переміщення 8 без використання електричних сигналів з електронного блоку 10. В цьому випадку з притисненням лінійок 4, 5 до бокових поверхонь штаби 1, зазор, що існує поміж стаканом 12 та рухомою кришкою 13, вибирається, вказані деталі стискаються і напрямні лінійки 4, 5 стають "жорсткими", отож зусилля притиснення лінійки 4, 5 до штаби 1 буде обмежуватися можливостями приводу переміщення 8 та його регулювання. З усього вище викладеного видно, що завдяки такому точному регулюванню зусилля притиснення напрямних лінійок до штаби, поліпшується якість країв штаби, що спрямовується, а також підвищується стійкість напрямних лінійок. 3 Фіг. 1 38304 4 Фіг. 2 38304 __________________________________________________________ ДП "Український інститут промислової власності" (Укрпатент) Україна, 01133, Київ-133, бульв. Лесі Українки, 26 (044) 295-81-42, 295-61-97 __________________________________________________________ Підписано до друку ________ 2001 р. Формат 60х84 1/8. Обсяг ______ обл.-вид. арк. Тираж 50 прим. Зам._______ ____________________________________________________________ УкрІНТЕІ, 03680, Київ-39 МСП, вул. Горького, 180. (044) 268-25-22 ___________________________________________________________ 5
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice of side direction of strip on roller conveyer
Автори англійськоюTischenko Andrii Mykolaiovych, Yershov Valentyn Oleksandrovych, Osokin Anatolii Andriiovych
Назва патенту російськоюУстройство бокового направления полосы на рольганге
Автори російськоюТищенко Андрей Николаевич, Ершов Валентин Александрович, Осокин Анатолий Андреевич
МПК / Мітки
МПК: B21B 39/14
Мітки: пристрій, направлення, штаби, бокового, рольганзі
Код посилання
<a href="https://ua.patents.su/5-38304-pristrijj-bokovogo-napravlennya-shtabi-na-rolganzi.html" target="_blank" rel="follow" title="База патентів України">Пристрій бокового направлення штаби на рольганзі</a>
Спосіб бокового направлення штабу при його беззупинному переміщенні рольгангом переважно від кліті до моталки для подальшого змотування у рулон
Номер патенту: 32105
Опубліковано: 15.12.2000
Автори: Сергійов Євген Павлович, Білобров Юрій Миколайович, Каушанський Ігор Борисович, Барабаш Андрій Володимирович, Малінін Леонід Вікторович, Модєєв Віктор Федорович, Стеч Володимир Станіславович, Погребняк Микола Прокопович, Глухов Володимир Васильович
МПК: B21B 39/14
Мітки: переважно, кліті, моталки, змотування, переміщенні, рулон, беззупинному, подальшого, бокового, спосіб, штабу, направлення, рольгангом
Текст:
...по меншій мірі двома приводними лінійками, одну з яких, що є базовою, переміщують та встановлюють у залежності від ширини штабу і здійснюють вимушений контакт торця штабу з робочою поверхнею базової лінійки, переміщують та встановлюють базову лінійку на відстань, що не менше половини номінальної ширини штабу відносно вісі рольгангу до початку переміщення штабу і спрямовують штаб у район лінійок під кутом до базової лінійки, здійснюючи...
Пристрій екранування гарячого металу на рольганзі штабового стану
Номер патенту: 35224
Опубліковано: 15.03.2001
Автори: Барабаш Андрій Володимирович, Пакін Володимир Арсєнтійович, Білобров Юрій Миколайович, Стеч Володимир Станіславович, Бортник Валерій Вікторович
МПК: B21B 39/14
Мітки: рольганзі, пристрій, металу, екранування, стану, штабового, гарячого
Формула / Реферат:
Пристрій екранування гарячого металу на рольганзі штабового стану, до складу якого входить каркас зі встановленими в ньому екранувальними елементами та поздовженими брусками, котрий розташовано на підпорах та оснащено урівноваженими важільними противагами, а також механізм повертання каркасу з приводом, відрізняється тим, що механізм повертання каркасу виконано у вигляді двоплечого важеля, один кінець якого з'єднано з каркасом, а другий -...
Спосіб стабілізації форми штаби на стані кварто
Номер патенту: 34180
Опубліковано: 15.02.2001
Автори: Яланський Вячеслав Петрович, Трофімов Віталій Олександрович, Коваль Сергій Миколайович, Піховкін Микола Миколайович, Тилик Василь Трохимович, Солтан Андрій Станіславович, Путнокі Олександр Юліусович
МПК: B21B 37/28
Мітки: форми, кварто, стані, стабілізації, штаби, спосіб
Текст:
...підшипник знаходиться під навантаженням. Затверджуваний спосіб дає можливість скоротити сумарний час прикладання зусилля QB гідровигину, тому що, згідно винаходу, в момент виходу штаби з валків зусилля QB знімають, а в момент захвату валками слідуючої штаби відновлюють його задане значення, тобто у час пауз у прокатці штабів зусилля гідровигину відсутнє. QB = 0 і, як походить з (1), QP = QЗ. Скоротивши таким чином тривалість прикладання...
Спосіб стабілізації форми штаби на стані кварто
Номер патенту: 33722
Опубліковано: 15.02.2001
Автори: Трофімов Віталій Олександрович, Солтан Андрій Станіславович, Тилик Василь Трохимович, Яланський Вячеслав Петрович, Коваль Сергій Миколайович, Піховкін Микола Миколайович, Путнокі Олександр Юліусович
МПК: B21B 37/28
Мітки: спосіб, стані, стабілізації, штаби, форми, кварто
Текст:
...знімають і відновлюють його першопочаткове значення у момент виходу штаби з валків. У тому випадку, якщо у відсутності штаби у кліті зазор між валками перебудовують з додатного на від'ємний, то, згідно з винаходом, зусилля гідрозрівноважування знімають і відновлюють його при зміні зазору з від ємного на додатний. Тобто у останньому випадку, якщо опісля виходу чергової штаби з валків зазор між валками залишається від'ємним, то...
Пристрій для направлення тягового ланцюга конвейєра

Номер патенту: 16769
Опубліковано: 29.08.1997
Автори: Логвін Анатолій Микитович, Бабенко Микола Павлович, Перський Володимир Давидович, Масліна Віктор Семенович, Рабінович Ізраіль Беніаминович, Обоскалов Сергій Іванович
МПК: B65G 19/00
Мітки: тягового, конвейєра, ланцюга, пристрій, направлення
Формула / Реферат:
1. Устройство для направлення тяговой цепи конвейєра, включающее съемники,закрепленные на козырьке рамы конвейера узлом соединения и содержащие рабочие части, размещенные между венцами звездочек с зазорами, и нерабочие части, отличающееся тем, что, с целью облегчения монтажа-демонтажа устройства и повышения надежности его работы, нерабочая часть каждого съемника выполнена с горизонтальным отверстием, а козырек рамы снабжен вертикальными...
Попередній патент: Спосіб гіпотермічного зберігання фрагментів тканини печінки
Наступний патент: Спосіб відеоторакоскопічної операції при спонтанному пневмотораксі
Випадковий патент: Система відновлення срібла з відходів