Гіроскопічний силовий пристрій системи керування та стабілізації дисковидного літального апарату
Формула / Реферат
Гіроскопічний силовий пристрій системи керування та стабілізації дисковидного літального апарату, який складається з чотирьох головних гіроскопів з двома ступенями вільності, розміщених у чотирьох внутрішніх сферичних рамках, які по парно з'єднані між собою за допомогою зубчатих секторів внутрішніх сферичних рамок і кріпляться до зовнішніх кільцевих рамок за допомогою цапф, які розташовані на рухомих кільцях, які у свою чергу з'єднані з зовнішними кільцевими рамками , електродвигунів переміщення рухомих кілець внутрішньої рамки відносно зовнішньої, чотирьох моментніх (прецезійних) електродвигунів, які з'єднані з внутрішніми сферичними рамками за допомогою зубчатих секторів, та нахиляють вектори кінетичних моментів головних гіроскопів, цапф кріплення внутришніх сферичних рамок до рухомих кілець, малого допоміжного гіроскопу та ланцюгу керування моментними (прецізійними) електродвигунами, який відрізняється тим, що внутрішні сферичні рамки мають можливість обертатися відносно зовнішніх кільцевих рамок за допомогою електродвигунів обертання рухомих кілець на яких розташовані цапфи внутрішніх сферичних рамок.
Текст
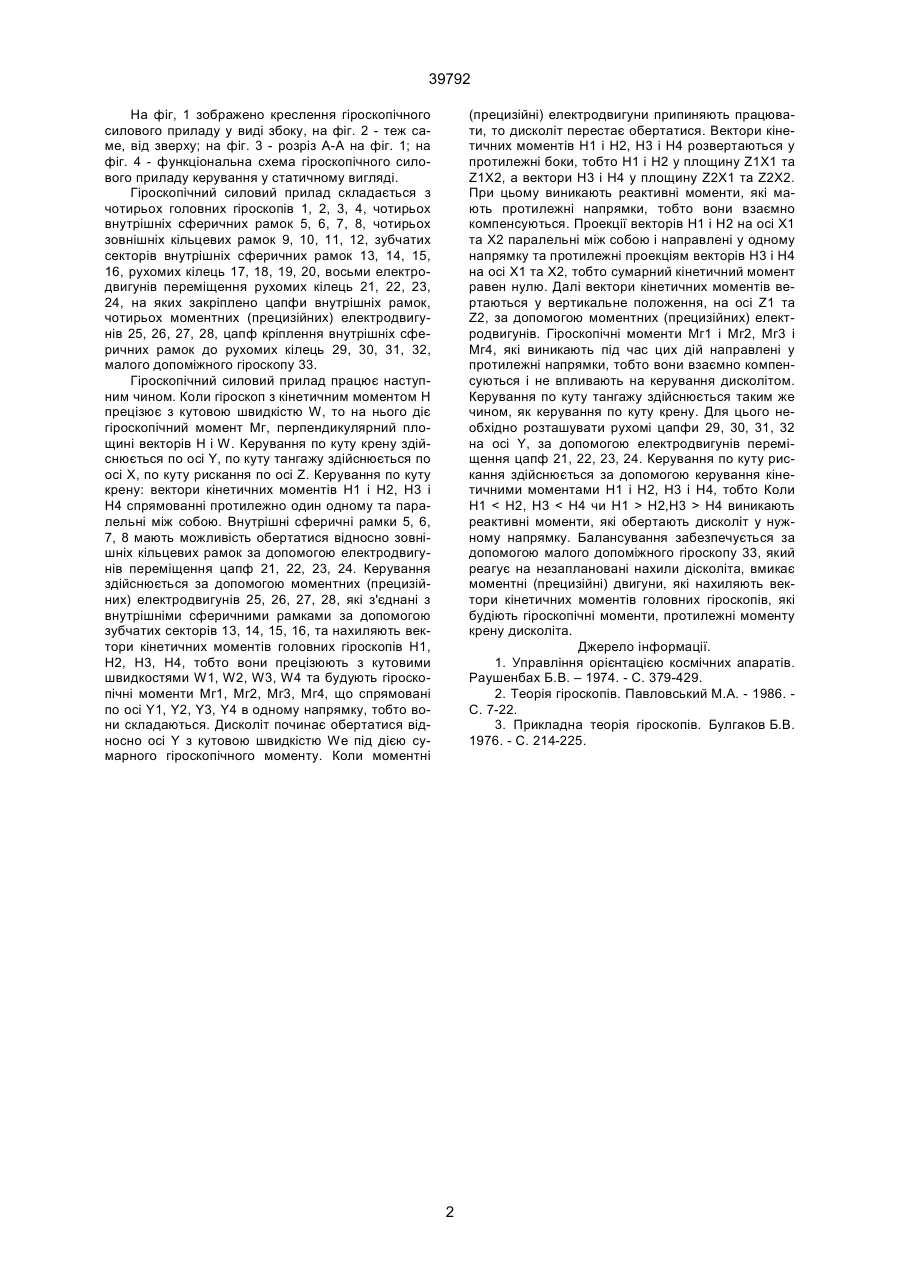
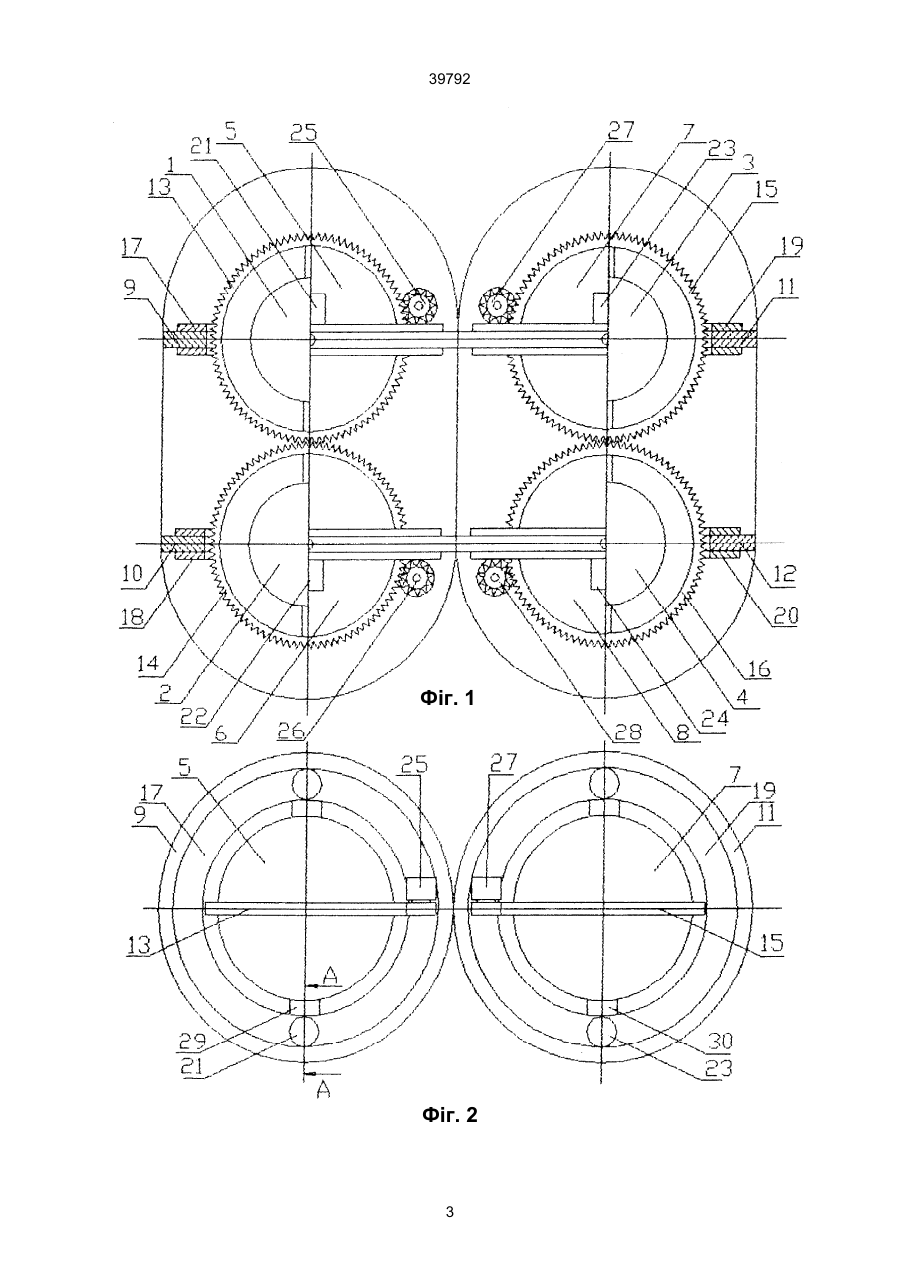
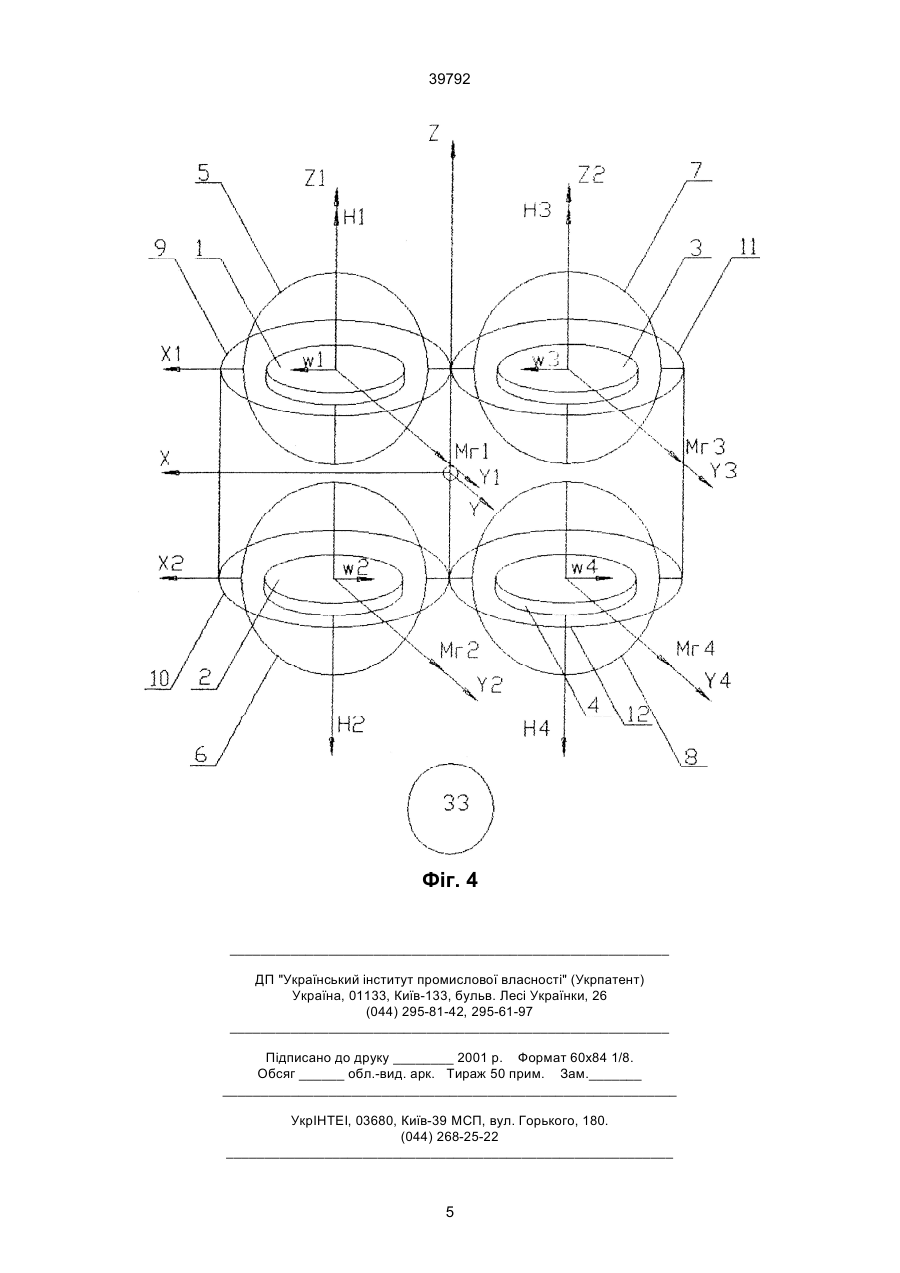
Гіроскопічний силовий пристрій системи керування та стабілізації дисковидного літального апарату, який складається з чотирьох головних гіроскопів з двома ступенями вільності, розміщених у чотирьох внутрішніх сферичних рамках, які попарно з'єднані між собою за допомогою зубчатих секторів внутрішніх сферичних рамок і кріпляться до зовнішніх кільцевих рамок за допомогою цапф, які розташовані на рухомих кільцях, які у свою чергу 39792 На фіг, 1 зображено креслення гіроскопічного силового приладу у виді збоку, на фіг. 2 - теж саме, від зверху; на фіг. 3 - розріз А-А на фіг. 1; на фіг. 4 - функціональна схема гіроскопічного силового приладу керування у статичному вигляді. Гіроскопічний силовий прилад складається з чотирьох головних гіроскопів 1, 2, 3, 4, чотирьох внутрішніх сферичних рамок 5, 6, 7, 8, чотирьох зовнішніх кільцевих рамок 9, 10, 11, 12, зубчатих секторів внутрішніх сферичних рамок 13, 14, 15, 16, рухомих кілець 17, 18, 19, 20, восьми електродвигунів переміщення рухомих кілець 21, 22, 23, 24, на яких закріплено цапфи внутрішніх рамок, чотирьох моментних (прецизійних) електродвигунів 25, 26, 27, 28, цапф кріплення внутрішніх сферичних рамок до рухомих кілець 29, 30, 31, 32, малого допоміжного гіроскопу 33. Гіроскопічний силовий прилад працює наступним чином. Коли гіроскоп з кінетичним моментом Н прецізює з кутовою швидкістю W, то на нього діє гіроскопічний момент Мг, перпендикулярний площині векторів Н і W. Керування по куту крену здійснюється по осі Y, по куту тангажу здійснюється по осі X, по куту рискання по осі Z. Керування по куту крену: вектори кінетичних моментів Н1 і Н2, Н3 і Н4 спрямованні протилежно один одному та паралельні між собою. Внутрішні сферичні рамки 5, 6, 7, 8 мають можливість обертатися відносно зовнішніх кільцевих рамок за допомогою електродвигунів переміщення цапф 21, 22, 23, 24. Керування здійснюється за допомогою моментних (прецизійних) електродвигунів 25, 26, 27, 28, які з'єднані з внутрішніми сферичними рамками за допомогою зубчатих секторів 13, 14, 15, 16, та нахиляють вектори кінетичних моментів головних гіроскопів Н1, Н2, Н3, Н4, тобто вони прецізюють з кутовими швидкостями W1, W2, W3, W4 та будують гіроскопічні моменти Мг1, Мг2, Мг3, Мг4, що спрямовані по осі Y1, Y2, Y3, Y4 в одному напрямку, тобто вони складаються. Дисколіт починає обертатися відносно осі Y з кутовою швидкістю We під дією сумарного гіроскопічного моменту. Коли моментні (прецизійні) електродвигуни припиняють працювати, то дисколіт перестає обертатися. Вектори кінетичних моментів Н1 і Н2, Н3 і Н4 розвертаються у протилежні боки, тобто Н1 і Н2 у площину Z1Х1 та Z1X2, а вектори Н3 і Н4 у площину Z2X1 та Z2X2. При цьому виникають реактивні моменти, які мають протилежні напрямки, тобто вони взаємно компенсуються. Проекції векторів Н1 і Н2 на осі X1 та Х2 паралельні між собою і направлені у одному напрямку та протилежні проекціям векторів Н3 і Н4 на осі X1 та Х2, тобто сумарний кінетичний момент равен нулю. Далі вектори кінетичних моментів вертаються у вертикальне положення, на осі Z1 та Z2, за допомогою моментних (прецизійних) електродвигунів. Гіроскопічні моменти Мг1 і Мг2, Мг3 і Мг4, які виникають під час цих дій направлені у протилежні напрямки, тобто вони взаємно компенсуються і не впливають на керування дисколітом. Керування по куту тангажу здійснюється таким же чином, як керування по куту крену. Для цього необхідно розташувати рухомі цапфи 29, 30, 31, 32 на осі Y, за допомогою електродвигунів переміщення цапф 21, 22, 23, 24. Керування по куту рискання здійснюється за допомогою керування кінетичними моментами Н1 і Н2, Н3 і Н4, тобто Коли Н1 < Н2, Н3 Н2,Н3 > Н4 виникають реактивні моменти, які обертають дисколіт у нужному напрямку. Балансування забезпечується за допомогою малого допоміжного гіроскопу 33, який реагує на незаплановані нахили дісколіта, вмикає моментні (прецизійні) двигуни, які нахиляють вектори кінетичних моментів головних гіроскопів, які будіють гіроскопічні моменти, протилежні моменту крену дисколіта. Джерело інформації. 1. Управління орієнтацією космічних апаратів. Раушенбах Б.В. – 1974. - С. 379-429. 2. Теорія гіроскопів. Павловський М.А. - 1986. С. 7-22. 3. Прикладна теорія гіроскопів. Булгаков Б.В. 1976. - С. 214-225. 2 39792 Фіг. 1 Фіг. 2 3 39792 Фіг. 3 4 39792 Фіг. 4 __________________________________________________________ ДП "Український інститут промислової власності" (Укрпатент) Україна, 01133, Київ-133, бульв. Лесі Українки, 26 (044) 295-81-42, 295-61-97 __________________________________________________________ Підписано до друку ________ 2001 р. Формат 60х84 1/8. Обсяг ______ обл.-вид. арк. Тираж 50 прим. Зам._______ ____________________________________________________________ УкрІНТЕІ, 03680, Київ-39 МСП, вул. Горького, 180. (044) 268-25-22 ___________________________________________________________ 5
ДивитисяДодаткова інформація
Назва патенту англійськоюGyroscopic power device of the system of control and stabilization of disk-shaped aircraft
Автори англійськоюYudaev Serhii Volodymyrovych
Назва патенту російськоюГироскопическое силовое устройство системы управления и стабилизации дискообразного летательного аппарата
Автори російськоюЮдаев Сергей Владимирович
МПК / Мітки
МПК: B64C 17/00
Мітки: стабілізації, керування, пристрій, дисковидного, силовий, гіроскопічний, апарату, літального, системі
Код посилання
<a href="https://ua.patents.su/5-39792-giroskopichnijj-silovijj-pristrijj-sistemi-keruvannya-ta-stabilizaci-diskovidnogo-litalnogo-aparatu.html" target="_blank" rel="follow" title="База патентів України">Гіроскопічний силовий пристрій системи керування та стабілізації дисковидного літального апарату</a>
Пульт, система та спосіб ручного керування та стабілізації регульованої величини руху літального апарата “аржесан”
Номер патенту: 26286
Опубліковано: 19.07.1999
Автор: Кашматов Віктор Йосипович
МПК: B64C 13/00
Мітки: аржесан, спосіб, літального, апарата, регульованої, стабілізації, руху, керування, ручного, система, пульт, величини
Формула / Реферат:
1. Пульт ручного управления и стабилизации регулируемой величины движения летательного аппарата, например воздушного судна, включающий стрелку и рукоятку, отличающийся тем, что стрелка выполнена в форме рукоятки и совмещена с нею, пульт ручного управления и стабилизации построен по схеме замкнутой системы непрямого регулирования положения рукоятки, которая (система) имеет вход и выход для связи с исполнительным контуром системы ручного...
Пристрій для навантажування літального апарату
Номер патенту: 16307
Опубліковано: 29.08.1997
Автори: Семеняк Олексій Андрійович, Ляшко Євгеній Митрофанович, Северин Анатолій Єгорович
МПК: B64D 9/00
Мітки: літального, пристрій, апарату, навантажування
Формула / Реферат:
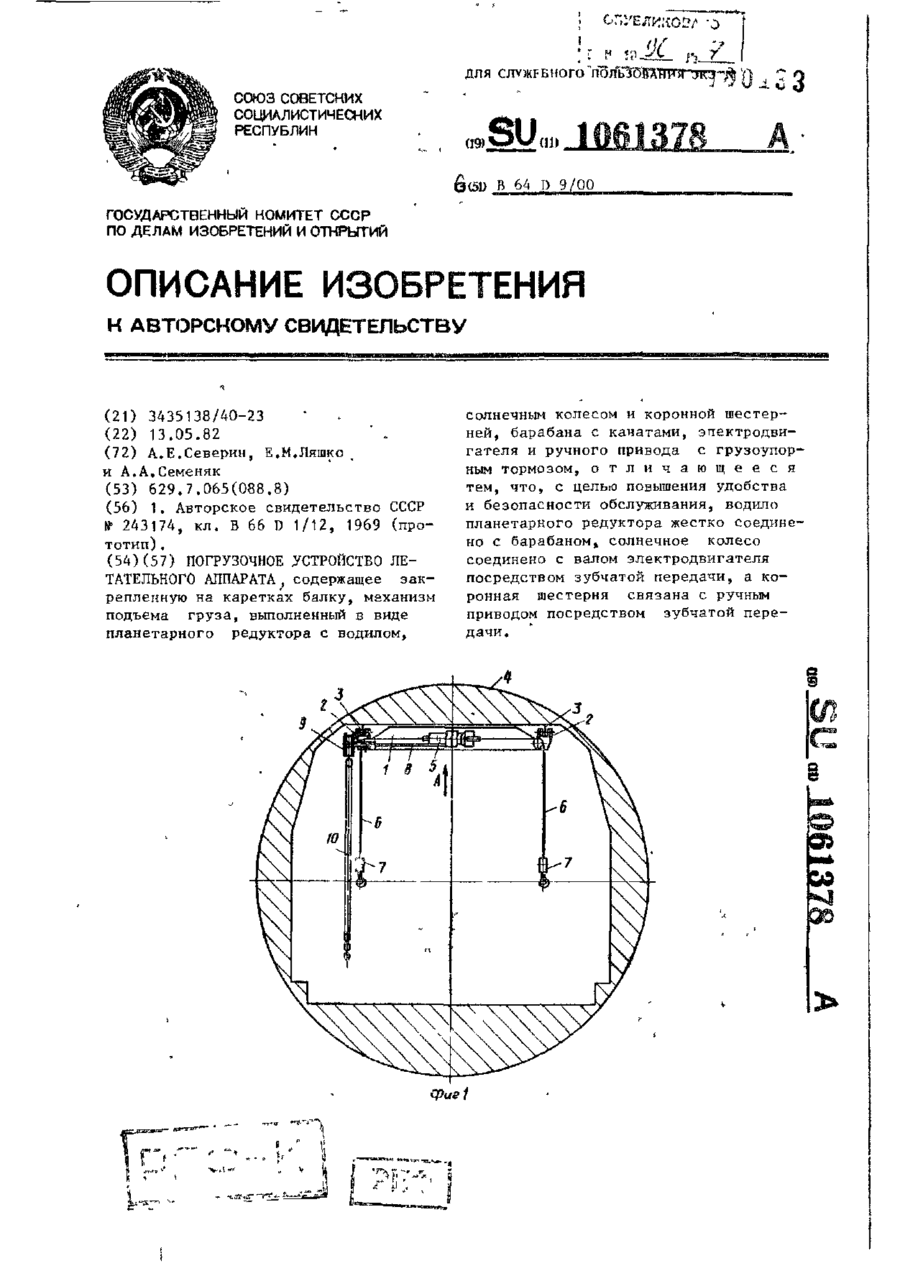
Погрузочное устройство летательного аппарата, содержащее закрепленную на каретках балку, механизм подъема груза, выполненный в виде планетарного редуктора с водилом, солнечным колесом и коронной шестерней, барабана с канатами, электродвигателя и ручного привода с грузоупорным тормозом, отличающееся тем, что, с целью повышения удобства и безопасности обслуживания , водило планетарного редуктора жестко соединено с барабаном, солнечное колесо...
Захисний пристрій двигуна літального апарату
Номер патенту: 16320
Опубліковано: 29.08.1997
Автори: Анисенко Віктор Гаврилович, Бесєдов Микола Павлович, Задорожний Володимир Єгорович, Смірнов Валерій Михайлович
МПК: B64D 33/00
Мітки: двигуна, апарату, літального, захисний, пристрій
Формула / Реферат:
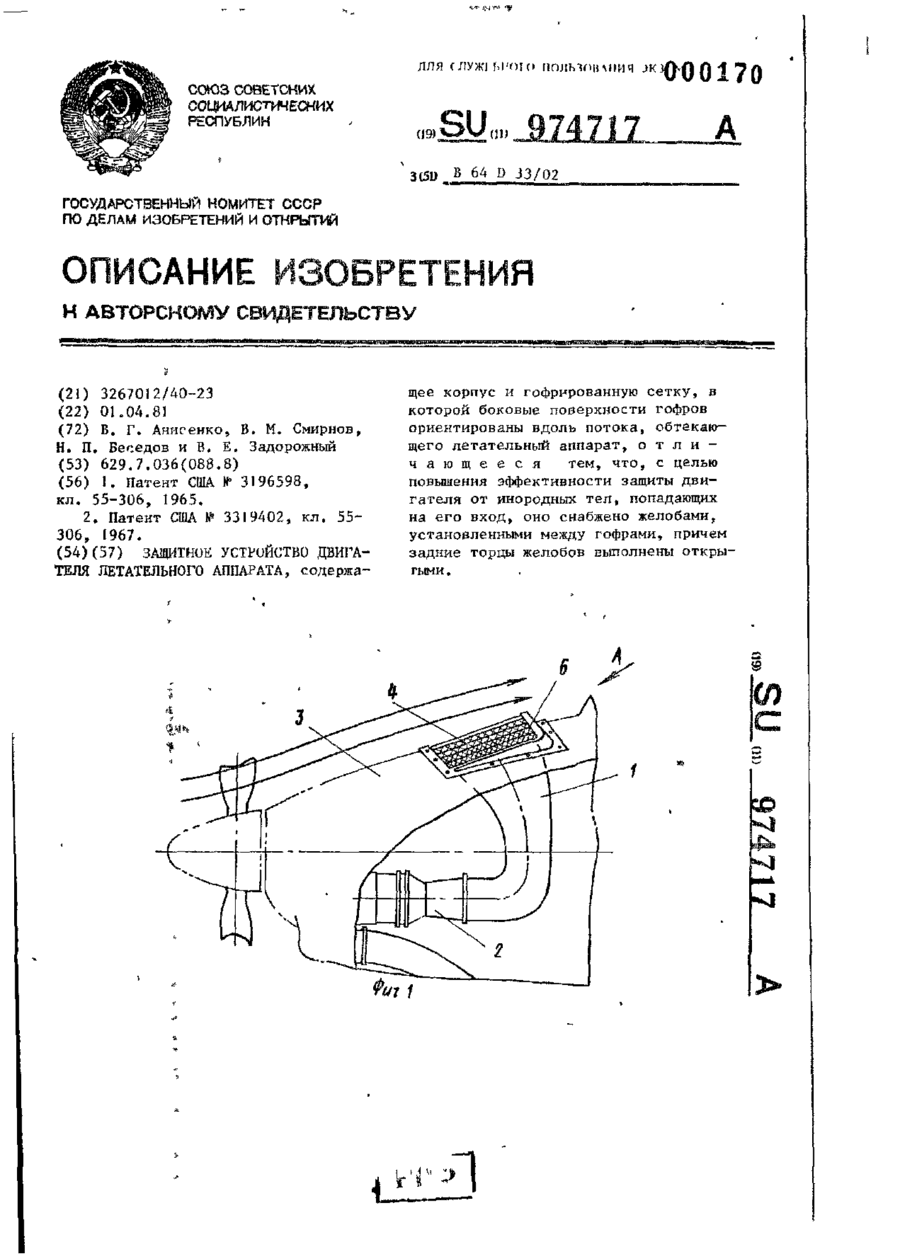
Защитное устройство двигателя летательного аппарата, содержащее корпус и гофрированную сетку, в которой боковые поверхности гофров ориентированы вдоль потока, обтекающего летательный аппарат, отличающееся тем, что, с целью повышения эффективности защиты двигателя от инородных тел, попадающих на его вход, оно снабжено желобами, установленными между гофрами, причем задние торцы желобов выполнены открытыми.
Пристрій для управління кришкою люка літального апарату
Номер патенту: 16528
Опубліковано: 29.08.1997
Автори: Лепяхов Юрій Степанович, Рабичев Олександр Іонович, Орєхов Володимир Іванович
МПК: B64C 1/14
Мітки: літального, люка, апарату, пристрій, управління, кришкою
Формула / Реферат:
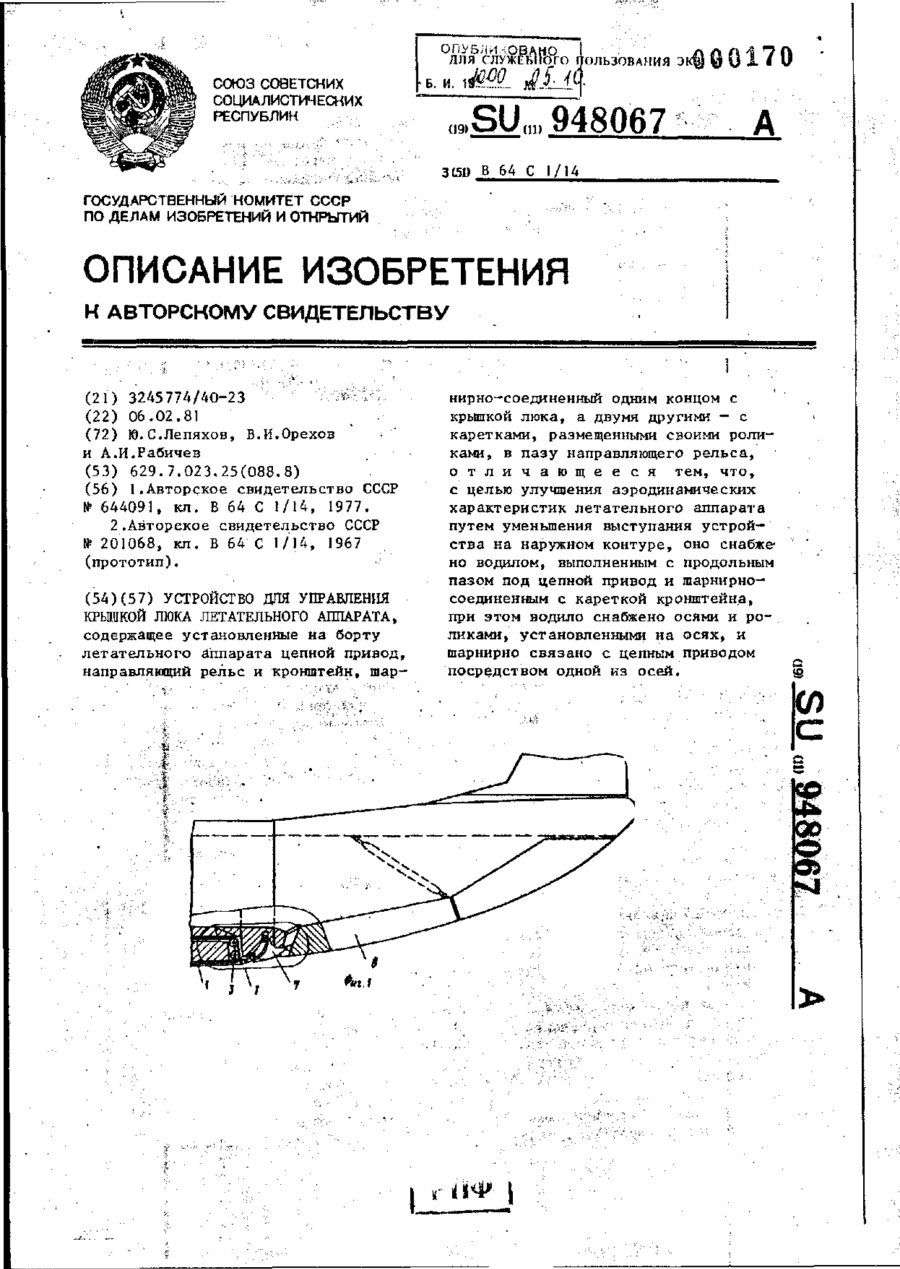
Устройство для управлення крышкой люка летательного аппарата, содержащее установленные на борту летательного аппарата цепной привод, направляющий рельс и кронштейн, шарнирно соединенный одним концом с крышкой люка, а двумя другими — с каретками, размещенными своими рояиками^ в пазу направляющего рельса, отличающееся тем, что, с целью улучшения аэродинамических характеристик летательного аппарата путем уменьшения выступания устройства на...
Пристрій для управління секціями аеродинамічної поверхні літального апарату
Номер патенту: 16305
Опубліковано: 29.08.1997
Автори: Старинський Віктор Васильович, Мухін Євгеній Георгійович, Рижко Вячеслав Федорович, Старицький Геннадій Павлович
МПК: B64C 13/00
Мітки: аеродинамічної, поверхні, літального, управління, секціями, пристрій, апарату
Формула / Реферат:
Устройство для управлення секциями аэродинамической поверхности летательного аппарата, содержащее исполнительный механизм, выход которого кинематически связан с двумя секциями аэродинамической поверхности летательного аппарата, два командных датчика, два ключа, выходы которых соединены с входами исполнительного механизма, источник постоянного напряжения и два элемента И, отличающееся тем, что, с целью повышения эксплуатационной надежности...