Операторський кран
Формула / Реферат
1. Операторський кран, що включає стрілу, виконану у вигляді механізму паралелограма, розташованого у вертикальній площині з поздовжніми і поперечними ланками, причому, середня частина стріли розміщена на опорі, встановленій на основі з можливістю повороту стріли у вертикальній і горизонтальній площинах, знімальну камеру та противагу, розміщені в передній і задній частинах стріли відповідно, який відрізняється тим, що додатково до передньої, середньої і задньої частин механізму паралелограма через передній, середній і задній кронштейни і з допомогою двохосьових шарнірних з'єднань додатково приєднана, принаймні, одна поздовжня ланка однакової довжини і паралельна поздовжнім ланкам механізму паралелограма, з утворенням при цьому другого механізму паралелограма, розташованого в площині, перпендикулярній площині механізму паралелограма, крім того, середній кронштейн розміщений на опорі і виконаний з можливістю повороту навколо горизонтальної осі, що проходить через центр маси стріли.
2. Операторський кран за п.1, який відрізняється тим, що горизонтальна вісь, яка проходить через центр маси стріли, є віссю двох горизонтальних шарнірів, що з'єднують установлений на них середній кронштейн і рамку, яка знаходиться усередині нього, закріплену на вузлі горизонтального повороту, розміщеного на опорі.
3. Операторський кран за п.1, який відрізняється тим, що в просторі між поздовжніми ланками другого механізму паралелограма над основою і між середнім і заднім кронштейнами розміщене операторське сидіння.
4. Операторський кран за п.1, який відрізняється тим, що противага складається з двох наборів вагів, розміщених на напрямних, розташованих уздовж лівого і правого країв заднього кронштейна.
5. Операторський кран за п.1, який відрізняється тим, що кожне двохосьове шарнірне з'єднання стріли, що зв'язує механізм паралелограма з кронштейнами і поздовжньою ланкою, може бути виконане у вигляді пари горизонтального і вертикального шарнірів або кульового шарніра.
6. Операторський кран за пп.1 і 5, який відрізняється тим, що вертикальні шарніри з парних двохосьових шарнірних з'єднань, які з'єднують механізм паралелограма з кронштейнами і поздовжньою ланкою, закріплені на поперечних сторонах кронштейнів і, крім того, вертикальні шарніри є поперечними ланками механізму паралелограма.
7. Операторський кран за п.1, який відрізняється тим, що середній і задній кронштейни стріли додатково оснащені рукоятками керування стрілою і панорамуванням знімальної камери.
8. Операторський кран за п.1, який відрізняється тим, що на середньому кронштейні в рамці установлений відеомонітор.
Текст
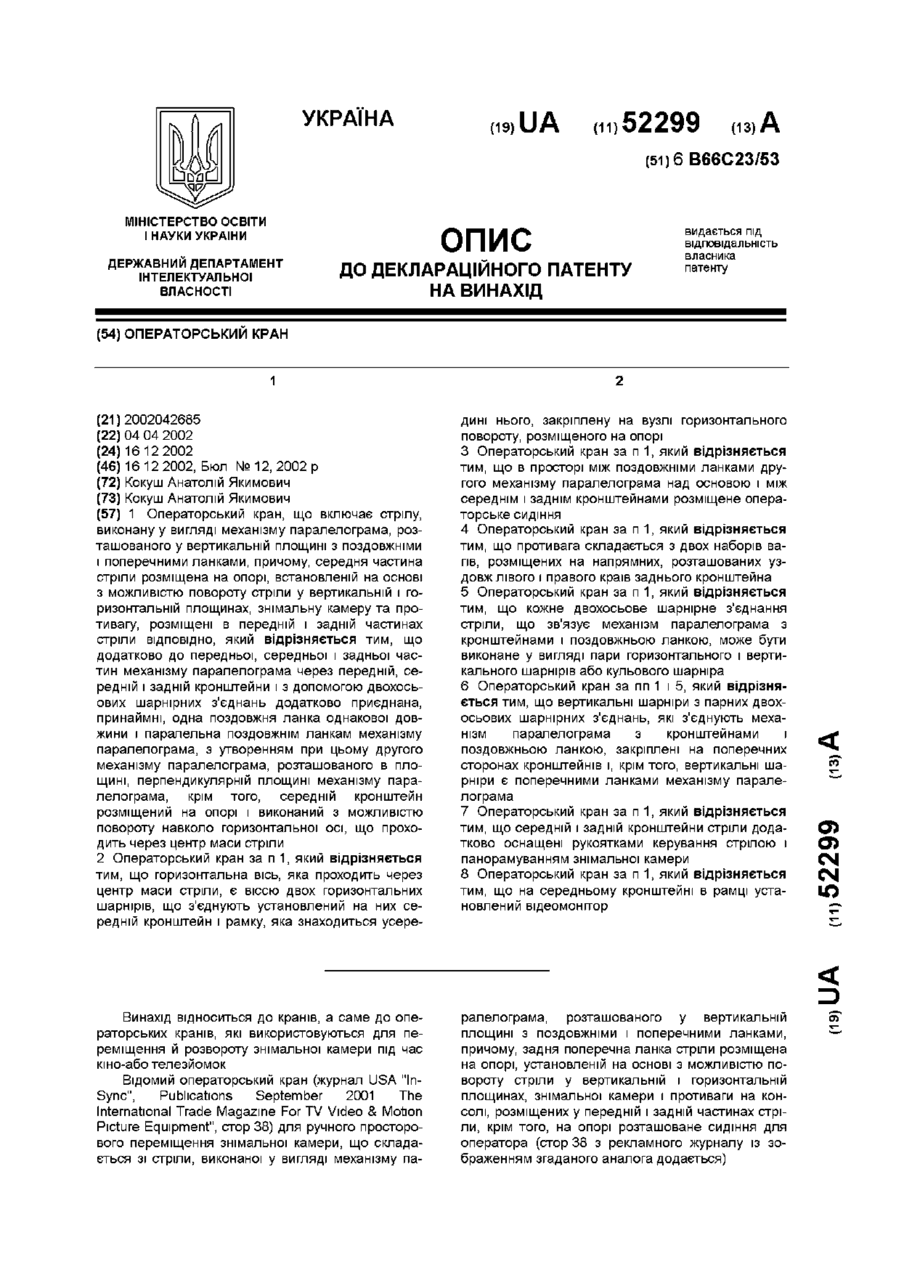
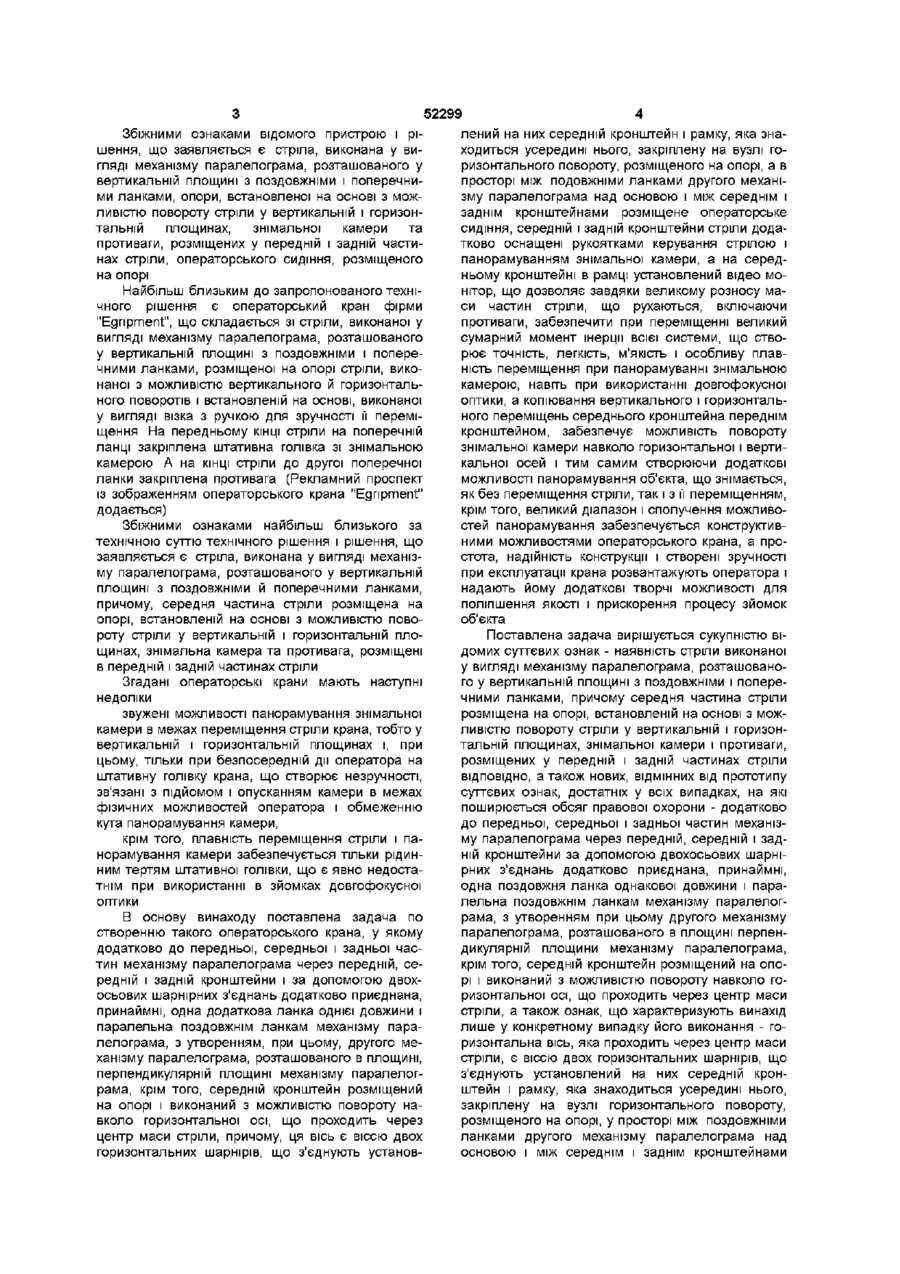
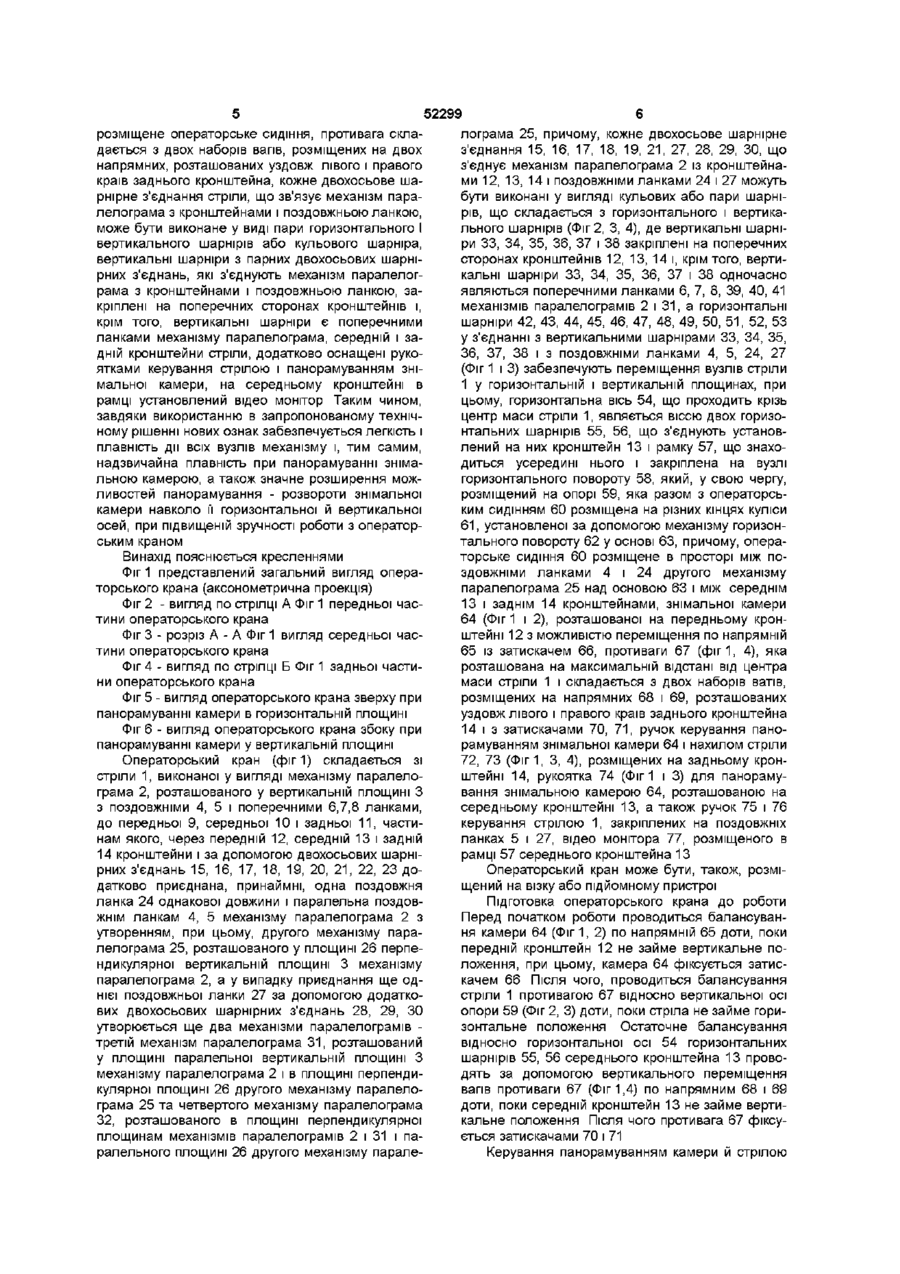
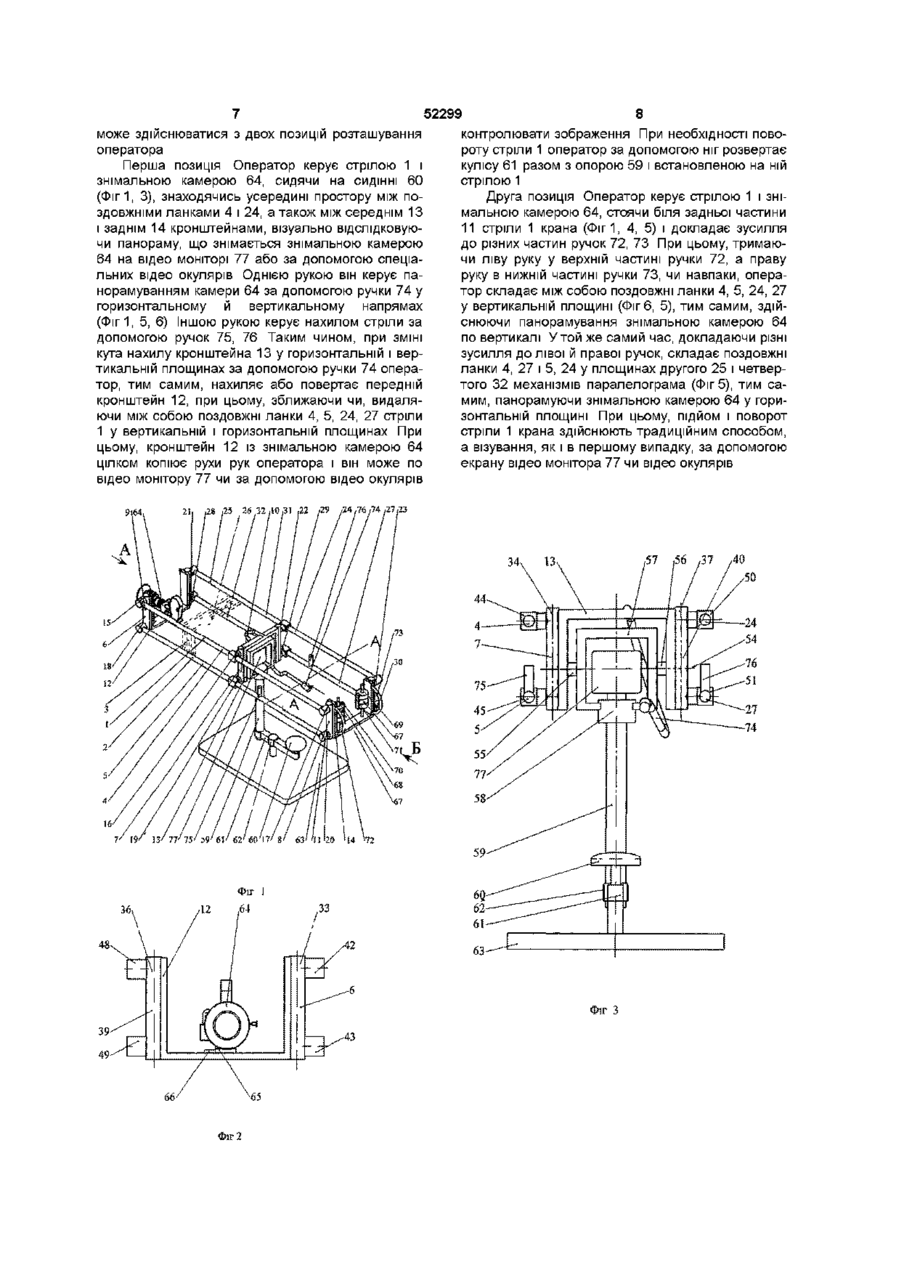
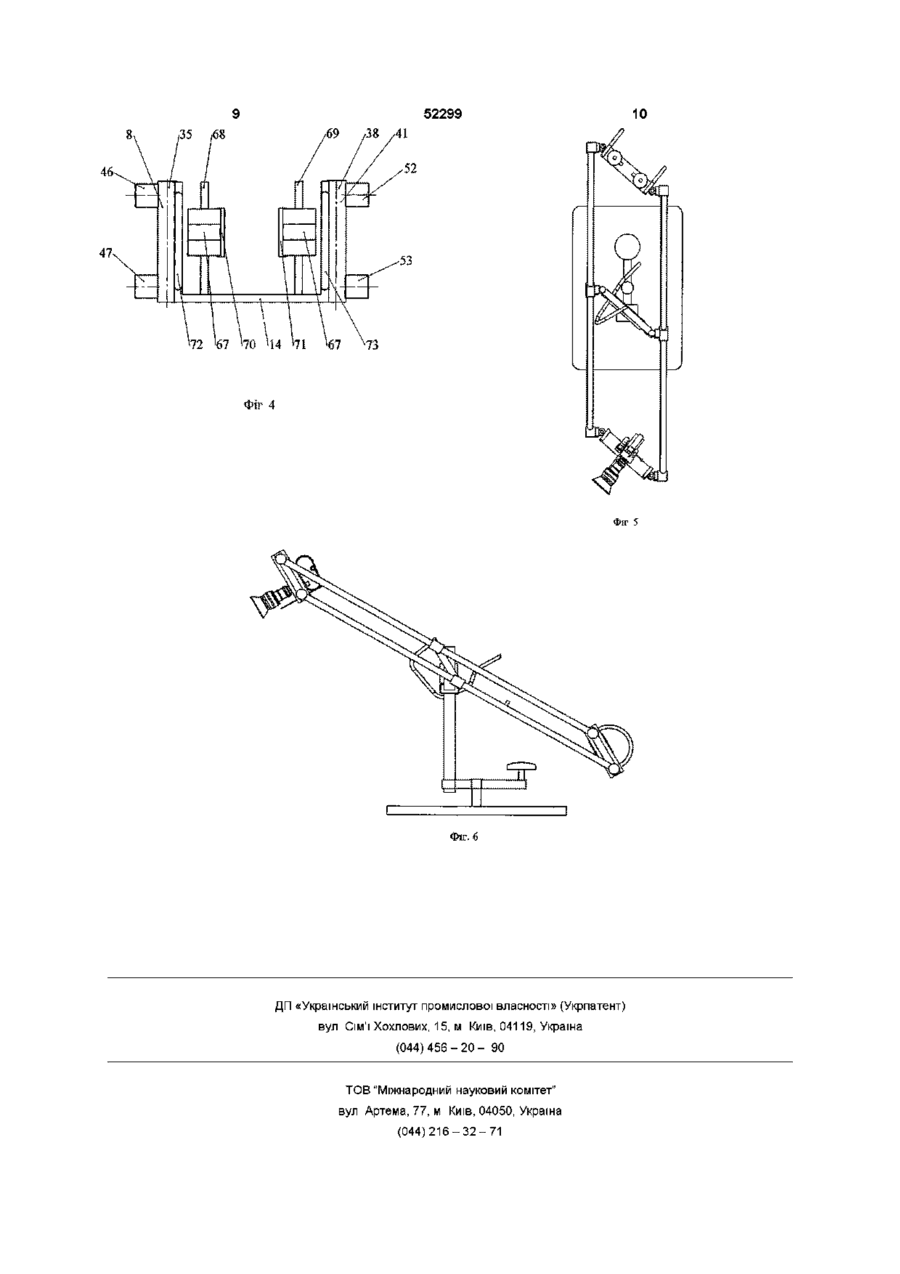
1 Операторський кран, що включає стрілу, виконану у вигляді механізму паралелограма, розташованого у вертикальній площині з поздовжніми і поперечними ланками, причому, середня частина стріли розміщена на опорі, встановленій на основі з можливістю повороту стріли у вертикальній і горизонтальній площинах, знімальну камеру та противагу, розміщені в передній і задній частинах стріли ВІДПОВІДНО, який відрізняється тим, що додатково до передньої, середньої і задньої частин механізму паралелограма через передній, середній і задній кронштейни і з допомогою двохосьових шарнірних з'єднань додатково приєднана, принаймні, одна поздовжня ланка однакової довжини і паралельна поздовжнім ланкам механізму паралелограма, з утворенням при цьому другого механізму паралелограма, розташованого в площині, перпендикулярній площині механізму паралелограма, крім того, середній кронштейн розміщений на опорі і виконаний з можливістю повороту навколо горизонтальної осі, що проходить через центр маси стріли 2 Операторський кран за п 1, який відрізняється тим, що горизонтальна вісь, яка проходить через центр маси стріли, є віссю двох горизонтальних шарнірів, що з'єднують установлений на них середній кронштейн і рамку, яка знаходиться усере дині нього, закріплену на вузлі горизонтального повороту, розміщеного на опорі 3 Операторський кран за п 1, який відрізняється тим, що в просторі між поздовжніми ланками другого механізму паралелограма над основою і між середнім і заднім кронштейнами розміщене операторське сидіння 4 Операторський кран за п 1, який відрізняється тим, що противага складається з двох наборів вапв, розміщених на напрямних, розташованих уздовж лівого і правого країв заднього кронштейна 5 Операторський кран за п 1, який відрізняється тим, що кожне двохосьове шарнірне з'єднання стріли, що зв'язує механізм паралелограма з кронштейнами і поздовжньою ланкою, може бути виконане у вигляді пари горизонтального і вертикального шарнірів або кульового шарніра 6 Операторський кран за пп 1 і 5, який відрізняється тим, що вертикальні шарніри з парних двохосьових шарнірних з'єднань, які з'єднують механізм паралелограма з кронштейнами і поздовжньою ланкою, закріплені на поперечних сторонах кронштейнів і, крім того, вертикальні шарніри є поперечними ланками механізму паралелограма 7 Операторський кран за п 1, який відрізняється тим, що середній і задній кронштейни стріли додатково оснащені рукоятками керування стрілою і панорамуванням знімальної камери 8 Операторський кран за п 1, який відрізняється тим, що на середньому кронштейні в рамці установлений відеомонітор Винахід відноситься до кранів, а саме до операторських кранів, які використовуються для переміщення й розвороту знімальної камери під час кіно-або телезйомок Відомий операторський кран (журнал USA "InSync", Publications September 2001 The International Trade Magazine For TV Video & Motion Picture Equipment", crop 38) для ручного просторового переміщення знімальної камери, що складається зі стріли, виконаної у вигляді механізму па ралелограма, розташованого у вертикальній площині з поздовжніми і поперечними ланками, причому, задня поперечна ланка стріли розміщена на опорі, установленій на основі з можливістю повороту стріли у вертикальній і горизонтальній площинах, знімальної камери і противаги на консолі, розміщених у передній і задній частинах стріли, крім того, на опорі розташоване сидіння для оператора (стор 38 з рекламного журналу із зображенням згаданого аналога додається) ю 52299 Збіжними ознаками відомого пристрою і рішення, що заявляється є стріла, виконана у вигляді механізму паралелограма, розташованого у вертикальній площині з поздовжніми і поперечними ланками, опори, встановленої на основі з можливістю повороту стріли у вертикальній і горизонтальній площинах, знімальної камери та противаги, розміщених у передній і задній частинах стріли, операторського сидіння, розміщеного на опорі Найбільш близьким до запропонованого технічного рішення є операторський кран фірми "Egnpment", що складається зі стріли, виконаної у вигляді механізму паралелограма, розташованого у вертикальній площині з поздовжніми і поперечними ланками, розміщеної на опорі стріли, виконаної з можливістю вертикального й горизонтального поворотів і встановленій на основі, виконаної у вигляді візка з ручкою для зручності її переміщення На передньому КІНЦІ стріли на поперечній ланці закріплена штативна голівка зі знімальною камерою А на КІНЦІ стріли до другої поперечної ланки закріплена противага (Рекламний проспект із зображенням операторського крана "Egnpment" додається) Збіжними ознаками найбільш близького за технічною суттю технічного рішення і рішення, що заявляється є стріла, виконана у вигляді механізму паралелограма, розташованого у вертикальній площині з поздовжніми й поперечними ланками, причому, середня частина стріли розміщена на опорі, встановленій на основі з можливістю повороту стріли у вертикальній і горизонтальній площинах, знімальна камера та противага, розміщені в передній і задній частинах стріли Згадані операторські крани мають наступні недоліки звужені можливості панорамування знімальної камери в межах переміщення стріли крана, тобто у вертикальній і горизонтальній площинах і, при цьому, тільки при безпосередній дії оператора на штативну голівку крана, що створює незручності, зв'язані з підйомом і опусканням камери в межах фізичних можливостей оператора і обмеженню кута панорамування камери, крім того, плавність переміщення стріли і панорамування камери забезпечується тільки рідинним тертям штативної голівки, що є явно недостатнім при використанні в зйомках довгофокусної оптики В основу винаходу поставлена задача по створенню такого операторського крана, у якому додатково до передньої, середньої і задньої частин механізму паралелограма через передній, середній і задній кронштейни і за допомогою двохосьових шарнірних з'єднань додатково приєднана, принаймні, одна додаткова ланка однієї довжини і паралельна поздовжнім ланкам механізму паралелограма, з утворенням, при цьому, другого механізму паралелограма, розташованого в площині, перпендикулярній площині механізму паралелограма, крім того, середній кронштейн розміщений на опорі і виконаний з можливістю повороту навколо горизонтальної осі, що проходить через центр маси стріли, причому, ця вісь є віссю двох горизонтальних шарнірів, що з'єднують установ лений на них середній кронштейн і рамку, яка знаходиться усередині нього, закріплену на вузлі горизонтального повороту, розміщеного на опорі, а в просторі між подовжніми ланками другого механізму паралелограма над основою і між середнім і заднім кронштейнами розміщене операторське сидіння, середній і задній кронштейни стріли додатково оснащені рукоятками керування стрілою і панорамуванням знімальної камери, а на середньому кронштейні в рамці установлений відео монітор, що дозволяє завдяки великому розносу маси частин стріли, що рухаються, включаючи противаги, забезпечити при переміщенні великий сумарний момент інерції всієї системи, що створює точність, легкість, м'якість І особливу плавність переміщення при панорамуванні знімальною камерою, навіть при використанні довгофокусної оптики, а копіювання вертикального і горизонтального переміщень середнього кронштейна переднім кронштейном, забезпечує можливість повороту знімальної камери навколо горизонтальної і вертикальної осей і тим самим створюючи додаткові можливості панорамування об'єкта, що знімається, як без переміщення стріли, так і з її переміщенням, крім того, великий діапазон і сполучення можливостей панорамування забезпечується конструктивними можливостями операторського крана, а простота, надійність конструкції і створені зручності при експлуатації крана розвантажують оператора і надають йому додаткові творчі можливості для поліпшення якості і прискорення процесу зйомок об'єкта Поставлена задача вирішується сукупністю відомих суттєвих ознак - наявність стріли виконаної у вигляді механізму паралелограма, розташованого у вертикальній площині з поздовжніми і поперечними ланками, причому середня частина стріли розміщена на опорі, встановленій на основі з можливістю повороту стріли у вертикальній і горизонтальній площинах, знімальної камери і противаги, розміщених у передній і задній частинах стріли ВІДПОВІДНО, а також нових, ВІДМІННИХ ВІД прототипу суттєвих ознак, достатніх у всіх випадках, на які поширюється обсяг правової охорони - додатково до передньої, середньої і задньої частин механізму паралелограма через передній, середній і задній кронштейни за допомогою двохосьових шарнірних з'єднань додатково приєднана, принаймні, одна поздовжня ланка однакової довжини і паралельна поздовжнім ланкам механізму паралелограма, з утворенням при цьому другого механізму паралелограма, розташованого в площині перпендикулярній площини механізму паралелограма, крім того, середній кронштейн розміщений на опорі і виконаний з можливістю повороту навколо горизонтальної осі, що проходить через центр маси стріли, а також ознак, що характеризують винахід лише у конкретному випадку його виконання - горизонтальна вісь, яка проходить через центр маси стріли, є віссю двох горизонтальних шарнірів, що з'єднують установлений на них середній кронштейн і рамку, яка знаходиться усередині нього, закріплену на вузлі горизонтального повороту, розміщеного на опорі, у просторі між поздовжніми ланками другого механізму паралелограма над основою і між середнім і заднім кронштейнами 52299 розміщене операторське сидіння, противага складається з двох наборів вапв, розміщених на двох напрямних, розташованих уздовж лівого і правого країв заднього кронштейна, кожне двохосьове шарнірне з'єднання стріли, що зв'язує механізм паралелограма з кронштейнами і поздовжньою ланкою, може бути виконане у виді пари горизонтального І вертикального шарнірів або кульового шарніра, вертикальні шарніри з парних двохосьових шарнірних з'єднань, які з'єднують механізм паралелограма з кронштейнами і поздовжньою ланкою, закріплені на поперечних сторонах кронштейнів і, крім того, вертикальні шарніри є поперечними ланками механізму паралелограма, середній і задній кронштейни стріли, додатково оснащені рукоятками керування стрілою і панорамуванням знімальної камери, на середньому кронштейні в рамці установлений відео монітор Таким чином, завдяки використанню в запропонованому технічному рішенні нових ознак забезпечується легкість і плавність дії всіх вузлів механізму і, тим самим, надзвичайна плавність при панорамуванні знімальною камерою, а також значне розширення можливостей панорамування - розвороти знімальної камери навколо її горизонтальної й вертикальної осей, при підвищеній зручності роботи з операторським краном Винахід пояснюється кресленнями Фіг 1 представлений загальний вигляд операторського крана (аксонометрична проекція) Фіг 2 - вигляд по стрілці А Фіг 1 передньої частини операторського крана Фіг 3 - розріз А - А Фіг 1 вигляд середньої частини операторського крана Фіг 4 - вигляд по стрілці Б Фіг 1 задньої частини операторського крана Фіг 5 - вигляд операторського крана зверху при панорамуванні камери в горизонтальній площині Фіг 6 - вигляд операторського крана збоку при панорамуванні камери у вертикальній площині Операторський кран (фіг 1) складається зі стріли 1, виконаної у вигляді механізму паралелограма 2, розташованого у вертикальній площині З з поздовжніми 4, 5 і поперечними 6,7,8 ланками, до передньої 9, середньої 10 і задньої 11, частинам якого, через передній 12, середній 13 і задній 14 кронштейни і за допомогою двохосьових шарнірних з'єднань 15, 16, 17, 18, 19, 20, 21, 22, 23 додатково приєднана, принаймні, одна поздовжня ланка 24 однакової довжини і паралельна поздовжнім ланкам 4, 5 механізму паралелограма 2 з утворенням, при цьому, другого механізму паралелограма 25, розташованого у площині 26 перпендикулярної вертикальній площині 3 механізму паралелограма 2, а у випадку приєднання ще однієї поздовжньої ланки 27 за допомогою додаткових двохосьових шарнірних з'єднань 28, 29, ЗО утворюється ще два механізми паралелограмів третій механізм паралелограма 31, розташований у площині паралельної вертикальній площині З механізму паралелограма 2 і в площині перпендикулярної площині 26 другого механізму паралелограма 25 та четвертого механізму паралелограма 32, розташованого в площині перпендикулярної площинам механізмів паралелограмів 2 і 31 і паралельного площині 26 другого механізму парале лограма 25, причому, кожне двохосьове шарнірне з'єднання 15, 16, 17, 18, 19, 21, 27, 28, 29, ЗО, що з'єднує механізм паралелограма 2 із кронштейнами 12, 13, 14 і поздовжніми ланками 24 і 27 можуть бути виконані у вигляді кульових або пари шарнірів, що складається з горизонтального і вертикального шарнірів (Фіг 2, 3, 4), де вертикальні шарніри 33, 34, 35, 36, 37 і 38 закріплені на поперечних сторонах кронштейнів 12, 13, 14 і, крім того, вертикальні шарніри 33, 34, 35, 36, 37 і 38 одночасно являються поперечними ланками 6, 7, 8, 39, 40, 41 механізмів паралелограмів 2 і 31, а горизонтальні шарніри 42, 43, 44, 45, 46, 47, 48, 49, 50, 51, 52, 53 у з'єднанні з вертикальними шарнірами 33, 34, 35, 36, 37, 38 і з поздовжніми ланками 4, 5, 24, 27 (Фіг 1 і 3) забезпечують переміщення вузлів стріли 1 у горизонтальній і вертикальній площинах, при цьому, горизонтальна вісь 54, що проходить крізь центр маси стріли 1, являється віссю двох горизонтальних шарнірів 55, 56, що з'єднують установлений на них кронштейн 13 і рамку 57, що знаходиться усередині нього і закріплена на вузлі горизонтального повороту 58, який, у свою чергу, розміщений на опорі 59, яка разом з операторським сидінням 60 розміщена на різних кінцях куліси 61, установленої за допомогою механізму горизонтального повороту 62 у основі 63, причому, операторське сидіння 60 розміщене в просторі між поздовжніми ланками 4 і 24 другого механізму паралелограма 25 над основою 63 і між середнім 13 і заднім 14 кронштейнами, знімальної камери 64 (Фіг 1 і 2), розташованої на передньому кронштейні 12 з можливістю переміщення по напрямній 65 із затискачем 66, противаги 67 (фиг 1, 4), яка розташована на максимальній відстані від центра маси стріли 1 і складається з двох наборів ватів, розміщених на напрямних 68 і 69, розташованих уздовж лівого і правого країв заднього кронштейна 14 і з затискачами 70, 71, ручок керування панорамуванням знімальної камери 64 і нахилом стріли 72, 73 (Фіг1, 3, 4), розміщених на задньому кронштейні 14, рукоятка 74 (Фіг 1 і 3) для панорамування знімальною камерою 64, розташованою на середньому кронштейні 13, а також ручок 75 і 76 керування стрілою 1, закріплених на поздовжніх ланках 5 і 27, відео монітора 77, розміщеного в рамці 57 середнього кронштейна 13 Операторський кран може бути, також, розміщений на візку або підйомному пристрої Підготовка операторського крана до роботи Перед початком роботи проводиться балансування камери 64 (Фіг1, 2) по напрямній 65 доти, поки передній кронштейн 12 не займе вертикальне положення, при цьому, камера 64 фіксується затискачем 66 Після ЧОГО, проводиться балансування стріли 1 противагою 67 відносно вертикальної осі опори 59 (Фіг 2, 3) доти, поки стріла не займе горизонтальне положення Остаточне балансування відносно горизонтальної осі 54 горизонтальних шарнірів 55, 56 середнього кронштейна 13 проводять за допомогою вертикального переміщення вапв противаги 67 (Фіг 1,4) по напрямним 68 і 69 доти, поки середній кронштейн 13 не займе вертикальне положення Після ЧОГО противага 67 фіксується затискачами 70 і 71 Керування панорамуванням камери й стрілою 52299 може здійснюватися з двох позицій розташування оператора Перша позиція Оператор керує стрілою 1 і знімальною камерою 64, сидячи на СИДІННІ 60 (Фіг1, 3), знаходячись усередині простору між поздовжніми ланками 4 і 24, а також між середнім 13 і заднім 14 кронштейнами, візуально відслідковуючи панораму, що знімається знімальною камерою 64 на відео моніторі 77 або за допомогою спеціальних відео окулярів Однією рукою він керує панорамуванням камери 64 за допомогою ручки 74 у горизонтальному й вертикальному напрямах (Фіг 1, 5, 6) Іншою рукою керує нахилом стріли за допомогою ручок 75, 76 Таким чином, при ЗМІНІ кута нахилу кронштейна 13 у горизонтальній і вертикальній площинах за допомогою ручки 74 оператор, тим самим, нахиляє або повертає передній кронштейн 12, при цьому, зближаючи чи, видаляючи між собою поздовжні ланки 4, 5, 24, 27 стріли 1 у вертикальній і горизонтальній площинах При цьому, кронштейн 12 із знімальною камерою 64 цілком копіює рухи рук оператора і він може по відео монітору 77 чи за допомогою відео окулярів 8 контролювати зображення При необхідності повороту стріли 1 оператор за допомогою ніг розвертає кулісу 61 разом з опорою 59 і встановленою на ній стрілою 1 Друга позиція Оператор керує стрілою 1 і знімальною камерою 64, стоячи біля задньої частини 11 стріли 1 крана (Фіг1, 4, 5) і докладає зусилля до різних частин ручок 72, 73 При цьому, тримаючи ліву руку у верхній частині ручки 72, а праву руку в нижній частині ручки 73, чи навпаки, оператор складає між собою поздовжні ланки 4, 5, 24, 27 у вертикальній площині (Фіг 6, 5), тим самим, здійснюючи панорамування знімальною камерою 64 по вертикалі У той же самий час, докладаючи різні зусилля до лівої й правої ручок, складає поздовжні ланки 4, 27 і 5, 24 у площинах другого 25 і четвертого 32 механізмів паралелограма (Фіг 5), тим самим, панорамуючи знімальною камерою 64 у горизонтальній площині При цьому, підйом і поворот стріли 1 крана здійснюють традиційним способом, а візування, як і в першому випадку, за допомогою екрану відео монітора 77 чи відео окулярів 76/74,27,23 34, •7 ,56 37 5 13 44 63 Фіг З /40 52299 69 /38 /41 Фіг 4 hr 5 Фіг. б ДП «Український інститут промислової власності» (Укрпатент) вул Сім'ї Хохлових, 15, м Київ, 04119, Україна ( 0 4 4 ) 4 5 6 - 2 0 - 90 ТОВ "Міжнародний науковий комітет" вул Артема, 77, м Київ, 04050, Україна (044)216-32-71
ДивитисяДодаткова інформація
Назва патенту англійськоюOperators crane
Автори англійськоюKokush Anatolii Yakymovych
Назва патенту російськоюОператорский кран
Автори російськоюКокуш Анатолий Акимович
МПК / Мітки
МПК: B66C 23/53
Мітки: операторський, кран
Код посилання
<a href="https://ua.patents.su/5-52299-operatorskijj-kran.html" target="_blank" rel="follow" title="База патентів України">Операторський кран</a>
Телескопічний операторський кран
Номер патенту: 19401
Опубліковано: 25.12.1997
Автор: Кокуш Анатолій Якимович
МПК: B66C 23/70
Мітки: кран, операторський, телескопічний
Формула / Реферат:
Телескопический операторский кран, содержащий телескопическую выдвижную стрелу, установленную с помощью подшипников поворота в вертикальной плоскости на опоре, размещенной на подшипнике поворота в горизонтальной плоскости, противовес, размещенный в консольной части стрелы с возможностью перемещения по ней, приводы выдвижения телескопической стрелы и перемещения противовеса по ней, отличающийся тем, что опора выполнена в виде вилочной рамы с...
Стріловий операторський кран
Номер патенту: 11298
Опубліковано: 25.12.1996
Автор: Кокуш Анатолій Якимович
МПК: B66C 23/72, B66C 23/70
Мітки: кран, операторський, стріловий
Формула / Реферат:
1. Стреловой операторский кран, содержащий установленную на опоре с возможностью поворота в вертикальной и горизонтальной плоскостях сборную, не менее чем из двух частей, полую стрелу, систему компенсации массы стрелы крана, распорки, огибающие их растяжки и механизмы натяжения растяжек, отличающийся тем, что на сборной полой стреле дополнительно размещена с возможностью возвратно-поступательного движения вдоль стрелы каретка со съемочной...
Операторський кран
Номер патенту: 7866
Опубліковано: 26.12.1995
Автори: Поповський Юрій Миколайович, Тищенко Борис Борисович, Кокуш Анатолій Якимович
МПК: B66C 23/70
Мітки: операторський, кран
Формула / Реферат:
1. Операторский кран, содержащий установленную на опоре с возможностью поворота в вертикальной и горизонтальной плоскостях стрелу, консоль с противовесом, соединенную со стрелой посредством муфты, закрепленной на опоре, жестко закрепленную на муфте в вертикальной продольной плоскости симметрии стрелы центральную распорку, боковые распорки, закрепленные на муфте под равными углами к центральной распорке, канатные блоки, установленные на концах...
Велосипедний кран
Номер патенту: 48202
Опубліковано: 15.08.2002
Автори: Шарепо Володимир Юхимович, Євтенко Віталій Васильович, Сушков Броніслав Костянтинович
МПК: B66C 5/00
Мітки: кран, велосипедний
Формула / Реферат:
1. Велосипедний кран, що містить прямовисну раму, на якій розташовані механізм пересування і механізм повороту стріли, суцільностінчасту стрілу з механізмом підйому, встановлену на прямовисній рамі, який відрізняється тим, що прямовисна рама складається з бокових стійок, верхньої балки і основи з коробчастими поперечними перерізами зовнішніх елементів, при цьому бокові стойки зігнуті з середини їх висоти та нахилені до центра, а основа має...
Автомобільний кран
Номер патенту: 39933
Опубліковано: 16.07.2001
Автор: Охримович Володимир Маркіянович
МПК: B66C 23/82
Мітки: кран, автомобільний
Формула / Реферат:
Автомобільний кран, що містять телескопічну стрілу, перша секція якої шарнірно з'єднана з поворотною рамою, гідроциліндр підйому стріли, шарнірно приєднаний до основи поворотної рами і першої секції стріли, опорно-поворотний пристрій і опорну раму, який відрізняється тим, що в основу поворотної рами наскрізь нерухомо вмонтована направна труба прямокутного перерізу під кутом, що дорівнює половині діапазону змінного нахилу гідроциліндра, щоки...
Попередній патент: Масообмінний пристрій
Наступний патент: Спосіб лікування катаракти
Випадковий патент: Спосіб відновлювання експлуатаційних характеристик оптико-електронного приладу