Надлишковий блок двигунів-маховиків
Номер патенту: 56694
Опубліковано: 25.01.2011
Автори: Бокаревич Маргарита Сергіївна, Кулік Анатолій Степанович, Фірсов Сергій Миколайович, Дзюба Анатолій Віталійович, Таран Олександр Миколайович

Формула / Реферат
Надлишковий блок двигунів-маховиків, який містить у своєму складі шість двигунів-маховиків, по два на кожну вісь, кінетичні моменти яких мають протилежний напрям, осі власного обертання яких співпадають з осями зв'язаної системи координат, який відрізняється тим, що в нього введений блок діагностики, входи якого з'єднані з виходами шести датчиків кутової швидкості і входами шести підсилювачів потужності, а вихід - з сьомим входом регулятора, шість виходів якого послідовно через шість підсилювачів потужності, шість двигунів-маховиків, шість датчиків кутової швидкості з'єднані з першим, другим, третім, четвертим, п'ятим і шостим входами регулятора.
Текст
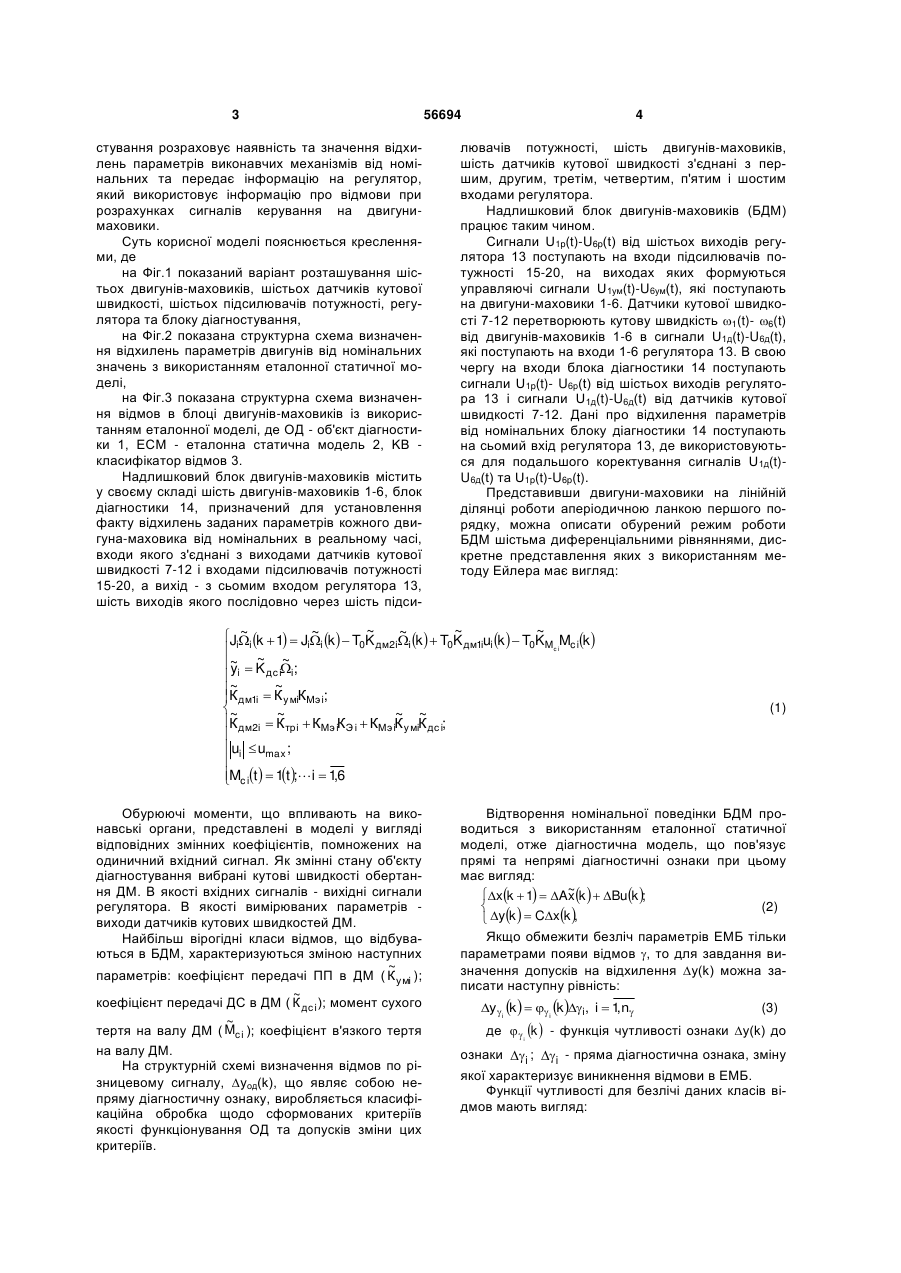
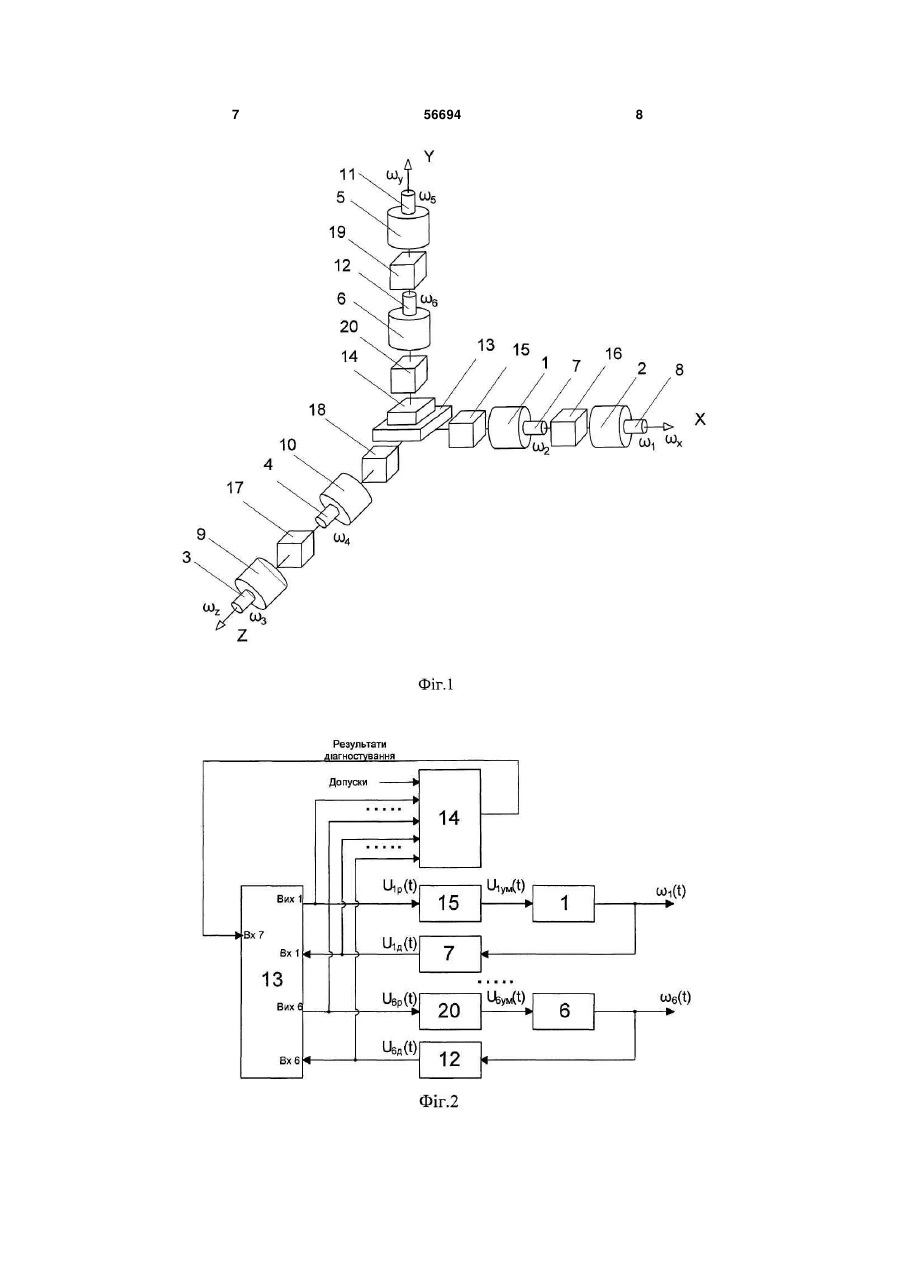
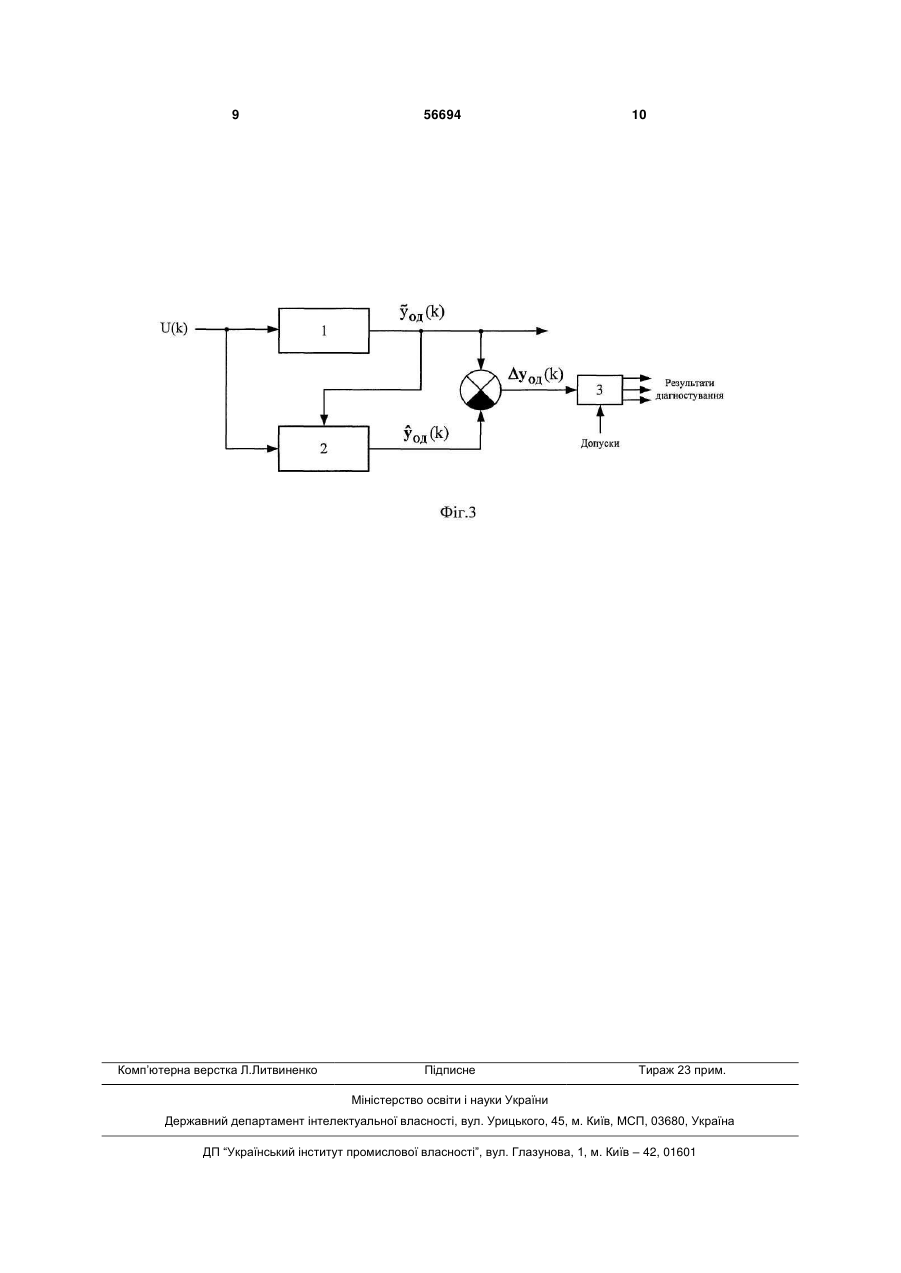
Надлишковий блок двигунів-маховиків, який містить у своєму складі шість двигунів-маховиків, 3 стування розраховує наявність та значення відхилень параметрів виконавчих механізмів від номінальних та передає інформацію на регулятор, який використовує інформацію про відмови при розрахунках сигналів керування на двигунимаховики. Суть корисної моделі пояснюється кресленнями, де на Фіг.1 показаний варіант розташування шістьох двигунів-маховиків, шістьох датчиків кутової швидкості, шістьох підсилювачів потужності, регулятора та блоку діагностування, на Фіг.2 показана структурна схема визначення відхилень параметрів двигунів від номінальних значень з використанням еталонної статичної моделі, на Фіг.3 показана структурна схема визначення відмов в блоці двигунів-маховиків із використанням еталонної моделі, де ОД - об'єкт діагностики 1, ЕСМ - еталонна статична модель 2, KB класифікатор відмов 3. Надлишковий блок двигунів-маховиків містить у своєму складі шість двигунів-маховиків 1-6, блок діагностики 14, призначений для установлення факту відхилень заданих параметрів кожного двигуна-маховика від номінальних в реальному часі, входи якого з'єднані з виходами датчиків кутової швидкості 7-12 і входами підсилювачів потужності 15-20, а вихід - з сьомим входом регулятора 13, шість виходів якого послідовно через шість підси 56694 4 лювачів потужності, шість двигунів-маховиків, шість датчиків кутової швидкості з'єднані з першим, другим, третім, четвертим, п'ятим і шостим входами регулятора. Надлишковий блок двигунів-маховиків (БДМ) працює таким чином. Сигнали U1p(t)-U6p(t) від шістьох виходів регулятора 13 поступають на входи підсилювачів потужності 15-20, на виходах яких формуються управляючі сигнали U1yм(t)-U6yм(t), які поступають на двигуни-маховики 1-6. Датчики кутової швидкості 7-12 перетворюють кутову швидкість 1(t)- 6(t) від двигунів-маховиків 1-6 в сигнали U1д(t)-U6д(t), які поступають на входи 1-6 регулятора 13. В свою чергу на входи блока діагностики 14 поступають сигнали U1p(t)- U6р(t) від шістьох виходів регулятора 13 і сигнали U1д(t)-U6д(t) від датчиків кутової швидкості 7-12. Дані про відхилення параметрів від номінальних блоку діагностики 14 поступають на сьомий вхід регулятора 13, де використовуються для подальшого коректування сигналів U1д(t)U6д(t) тa U1p(t)-U6p(t). Представивши двигуни-маховики на лінійній ділянці роботи аперіодичною ланкою першого порядку, можна описати обурений режим роботи БДМ шістьма диференціальними рівняннями, дискретне представлення яких з використанням методу Ейлера має вигляд: ~ ~ ~ ~ ~ ~ J k 1 J k T K i i 0 дм2іі k T0K дм1іui k T0KMc iMcik i i ~ ~ ~ K ; y дсі і i ~ ~ К дм1і К уміКМэі; ~ ~ ~ ~ К дм2і К трі КМэіКЭі КМэіК уміК дсі; ui umax ; Mcit 1t ;i 16 , Обурюючі моменти, що впливають на виконавські органи, представлені в моделі у вигляді відповідних змінних коефіцієнтів, помножених на одиничний вхідний сигнал. Як змінні стану об'єкту діагностування вибрані кутові швидкості обертання ДМ. В якості вхідних сигналів - вихідні сигнали регулятора. В якості вимірюваних параметрів виходи датчиків кутових швидкостей ДМ. Найбільш вірогідні класи відмов, що відбуваються в БДМ, характеризуються зміною наступних ~ параметрів: коефіцієнт передачі ПП в ДМ ( Кумі ); ~ коефіцієнт передачі ДС в ДМ ( К дсі ); момент сухого ~ тертя на валу ДМ ( Mсі ); коефіцієнт в'язкого тертя на валу ДМ. На структурній схемі визначення відмов по різницевому сигналу, уод(k), що являє собою непряму діагностичну ознаку, виробляється класифікаційна обробка щодо сформованих критеріїв якості функціонування ОД та допусків зміни цих критеріїв. (1) Відтворення номінальної поведінки БДМ проводиться з використанням еталонної статичної моделі, отже діагностична модель, що пов'язує прямі та непрямі діагностичні ознаки при цьому має вигляд: xk 1 A~k Buk ; x (2) yk Cxk , Якщо обмежити безліч параметрів ЕМБ тільки параметрами появи відмов , то для завдання визначення допусків на відхилення у(k) можна записати наступну рівність: yi k i ki, i 1 n , (3) де i k - функція чутливості ознаки у(k) до ознаки i ; i - пряма діагностична ознака, зміну якої характеризує виникнення відмови в ЕМБ. Функції чутливості для безлічі даних класів відмов мають вигляд: 5 56694 6 T0K Mэ іК дс і ~ T0K Mэ іК дс і i k 1 ui k 1; у мі J J T0KMэ іК умі ~ T0KMэ іК умі Т0КМс і K дсі k i k 1 ui k 1 Мс k 1 ; J J J ~ K k T0K дс і ~ i k 1 ; тр і J T0K дс і ~ K k Мс і k 1 М сі J ~ K k Для визначення факту появи відмови досить зафіксувати відхилення вихідного сигналу датчика швидкості кожного з ДМ від відповідного виходу ЕСМ, яке перевищує межі заданого показника якості функціонування безпосередньо пов'язаного з допуском відхилення непрямої діагностичної ознаки yi k yim i nk , yim a x k . При цьому використо вується предикативне рівняння вигляду: 0, якщо Іі І zбдмі ,Іі f yi , I f yim i n , f yim a x .(8) , 1 якщо Іі І (4) (5) (6) (7) Вид функцій чутливості показує, що класи відмов помітні на перехідних режимах функціонування ДМ відповідних умові: T ui k const , i k const , k 0, д , (9) T0 При цьому вводиться ряд додаткових ознак z дм jm , сформованих з умови квазістаціонарної прямої діагностичної ознаки im на інтервалі діагностування: Якщо значення предиката zбдмі дорівнює "1", виходить, в і-м ДМ відбулася відмова, якщо дорівнює "0", то він функціонує нормально. ym k ˆ im ~ ~ Ai ~ Bi m k 1 um k 1 i i (10) ~ ˆ ˆ imk const jm k var, якщо im 0 umk var mk var ; ˆ (11) i, j 1 4, i j; j 1 6 , , 1 якщо Ідм im Ідм im , z дмi m S2 Iдм im Iдм im ; 0, якщо Ідм im Iдм im (12) ˆ ˆ Ідмim imk 1 imk, i 13 ; , (13) Кількість додаткових ознак визначається з умови розрізнюваності всіх класів відмов і має бути не менше три для кожного ДМ. Після визначення місця і класу відмови, інформація про відповідне відхилення параметра, що діагностується, передається в регулятор, який компенсує відмову параметричним і сигнальним підстроюванням. Компенсація відмов датчиків зворотних зв'язків здійснюється за рахунок збільшення до вихідного сигналу датчика, що відмовив ~дс величини назад ~ пропорційною оцінному значенню зміни K дс і номінального значення Kд коефіцієнта передачі: K дс . у дс вос ~дс у (14) K дс K дс Для компенсації параметричних відмов викликаних зміною коефіцієнта передачі підсилювача потужності або зміни моментів опору обертанню ДМ, відшукується додатковий вектор управління uд(k), що мінімізує норму вектора нев'язності системи з урахуванням тієї, що фізичної реалізовується сигналів: у k 1 Ay k Ay k CBuk u k ; д y k 1 0; (15) uk u д k umax 7 56694 8 9 Комп’ютерна верстка Л.Литвиненко 56694 Підписне 10 Тираж 23 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюRedundant block of engines-flywheels
Автори англійськоюKulik Anatolii Stepanovych, Firsov Serhii Mykolaiovych, Taran Oleksandr Mykolaiovych, Dziuba Anatolii Vitaliiovych, Bokarevych Marharyta Serhiivna
Назва патенту російськоюИзбыточный блок двигателей-маховиков
Автори російськоюКулик Анатолий Степанович, Фирсов Сергей Николаевич, Таран Александр Николаевич, Дзюба Анатолий Витальевич, Бокаревич Маргарита Сергеевна
МПК / Мітки
МПК: B64G 1/24
Мітки: надлишковий, двигунів-маховиків, блок
Код посилання
<a href="https://ua.patents.su/5-56694-nadlishkovijj-blok-dviguniv-makhovikiv.html" target="_blank" rel="follow" title="База патентів України">Надлишковий блок двигунів-маховиків</a>
Надлишковий блок двигунів-маховиків
Номер патенту: 42893
Опубліковано: 27.07.2009
Автори: Субота Анатолій Максимович, Резнікова Ольга Вікторівна, Фірсов Сергій Миколайович, Кулік Анатолій Степанович
МПК: B64G 1/24
Мітки: двигунів-маховиків, блок, надлишковий
Формула / Реферат:
Надлишковий блок двигунів-маховиків, що містить у своєму складі три двигуни-маховики, що встановлені вздовж осей зв'язаної системи координат космічного апарата, який відрізняється тим, що вздовж кожної із осей установлено додатково по одному двигуну-маховику, при цьому кінетичні моменти двох двигунів-маховиків, встановлених на одній осі, мають протилежний напрям.
Надлишковий блок двигунів-маховиків
Номер патенту: 35598
Опубліковано: 25.09.2008
Автори: Субота Анатолій Максимович, Резнікова Ольга Вікторівна, Кулік Анатолій Степанович
МПК: B64G 1/24
Мітки: двигунів-маховиків, блок, надлишковий
Формула / Реферат:
Надлишковий блок двигунів-маховиків, що містить у своєму складі чотири двигуни-маховики, який відрізняється тим, що осі власного обертання двигунів-маховиків співпадають з ребрами правильної чотирикутної у основі піраміди, при цьому кінетичні моменти двох двигунів-маховиків, розташованих на діаметрально протилежних ребрах піраміди, мають напрям у бік вершини, а напрям кінетичних моментів інших двох двигунів-маховиків лежить у бік основи...
Відмовостійкий надлишковий блок двигунів-маховиків

Номер патенту: 56586
Опубліковано: 25.01.2011
Автори: Кулік Анатолій Степанович, Фірсов Сергій Миколайович, Прокопчук Дмитро Володимирович, Таран Олександр Миколайович
МПК: B64G 1/24
Мітки: двигунів-маховиків, відмовостійкий, блок, надлишковий
Формула / Реферат:
Відмовостійкий надлишковий блок двигунів-маховиків, що складається з надлишкового блока двигунів-маховиків, який містить у своєму складі чотири двигуни-маховики, осі власного обертання яких співпадають з ребрами правильної чотирикутної у основі піраміди, та підсилювач потужності, який відрізняється тим, що введений блок діагностування відмов кожного двигуна, вхід якого з'єднаний з виходами оптичних переривників, а вихід - з входом...
Функціонально-надлишковий інерціальний вимірювальний блок
Номер патенту: 7058
Опубліковано: 15.06.2005
Автори: Гордін Олександр Григорович, Калашникова Валерія Михайлівна, Шипітько Олена Олександрівна
МПК: G01C 21/00
Мітки: вимірювальний, інерціальній, блок, функціонально-надлишковий
Формула / Реферат:
1. Функціонально-надлишковий інерціальний вимірювальний блок, що включає чотири одноступеневих вимірювачі довільно спрямованого векторного параметра, осі чутливості яких представляють вимірювальний базис, розташовані по твірних конуса, мають спільний початок на осі конуса, який відрізняється тим, що в нього введена система обробки інформації, яка включає чотири обчислювальних пристрої, що споживають інформацію вимірювачів, вхід першого з...
Блок відмовостійких сервоприводів для каналу тангажа
Номер патенту: 36467
Опубліковано: 27.10.2008
Автор: Кулік Анатолій Степанович
МПК: G05D 1/08
Мітки: відмовостійких, тангажа, каналу, сервоприводів, блок
Формула / Реферат:
Блок відмовостійких сервоприводів для каналу тангажа, що містить двигун-маховик, керуючий вхід, групу інформаційних виходів, який відрізняється тим, що містить другий двигун-маховик, другий керуючий вхід, два аналого-цифрових перетворювачі, генератор видів відмов, два імітатори видів відмов, блок діагностування видів відмов, блок відновлення працездатності, дві шини керування, причому виходи давачів першого двигуна-маховика з'єднані з входами...
Попередній патент: Автоматизоване робоче місце оператора постсеансової обробки даних ефемеридних супутникових вимірів
Наступний патент: Спосіб зниження рівня ембріональної смертності у кролематок
Випадковий патент: Фільтр-прес