Шарнірний привід
Номер патенту: 723
Опубліковано: 15.03.2001
Автори: Корольова Галина Валентинівна, Корольов Сергій Михайлович, Пуриш Валентин Захарович



Формула / Реферат
Шарнірний привід, що складається із корпуса неповноповоротного моментного силового циліндра, золотника з приводом від крокуючого електродвигуна, з датчика відпрацьованого кута і мікропроцесорної системи керування у вигляді монолітних блоків, який відрізняється тим, що у корпусі встановлено ще один циліндр, вісь якого розташована під кутом 90 градусів до першого і теж має золотник з приводом від крокуючого електродвигуна та датчик відпрацьованого кута і на кожному між циліндром і рухомою вилкою встановлено підпружинену гальмівну колодку з електромагнітним приводом, а також спільну мікропроцесорну систему керування.
Текст
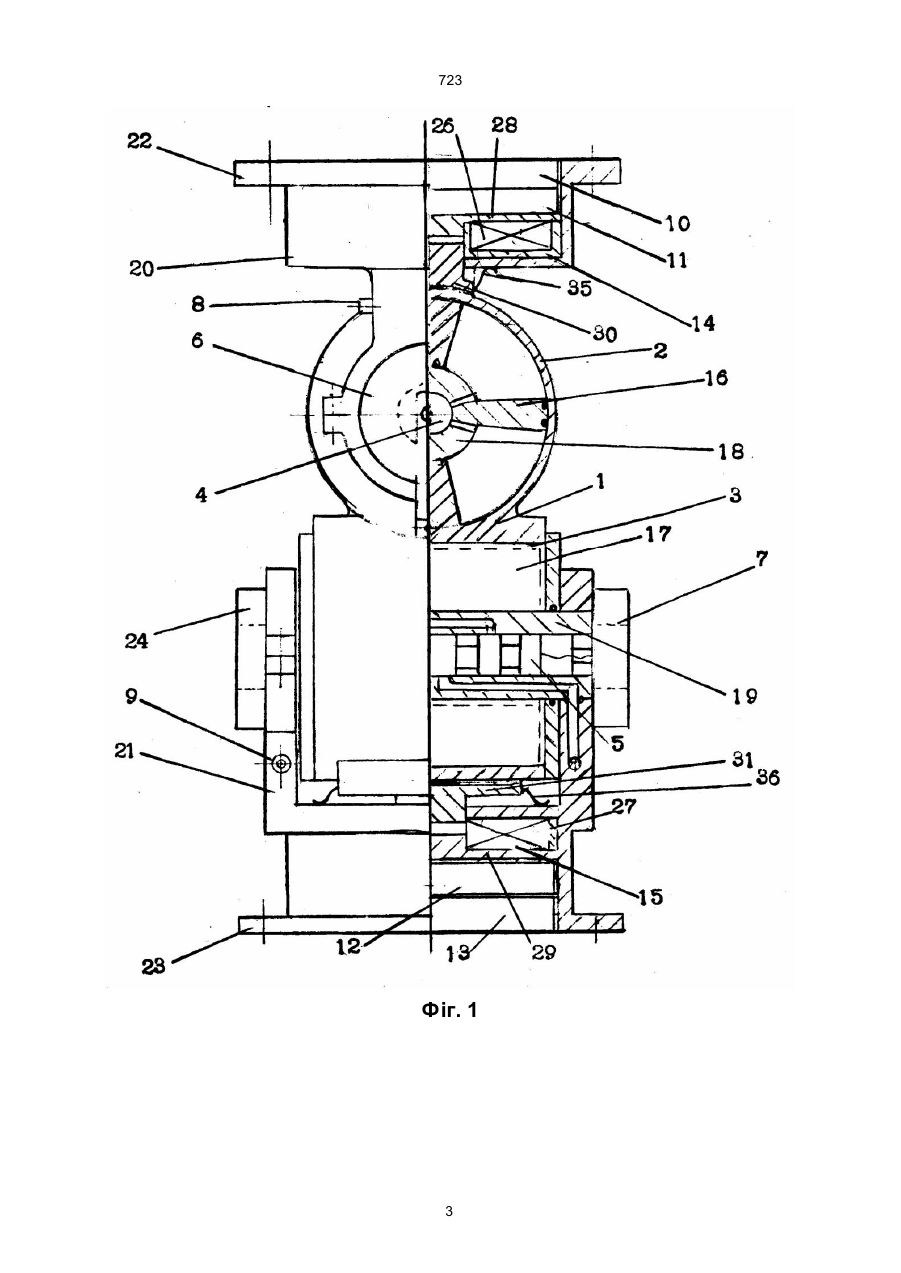
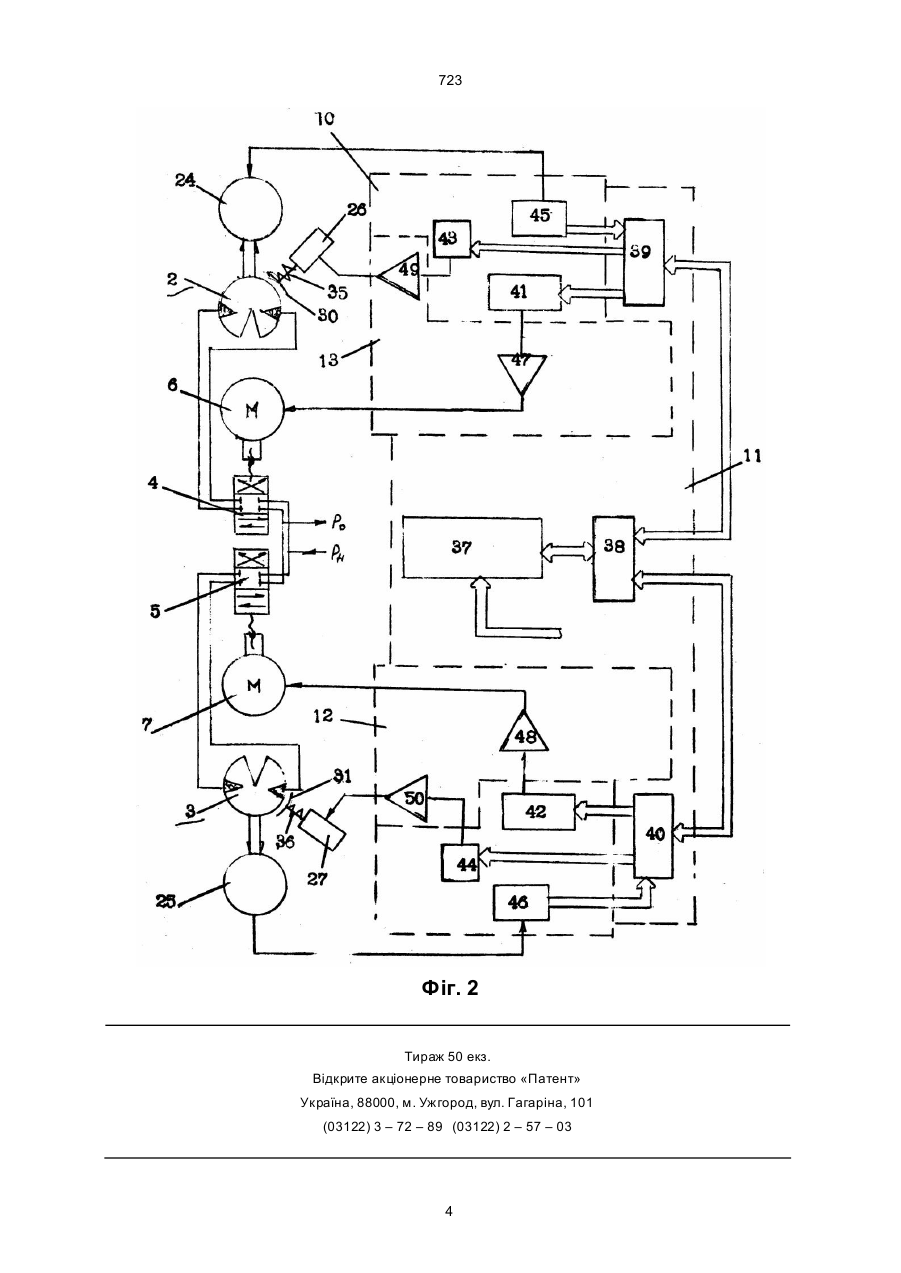
Шарнірний привід, що складається із корпуса неповноповоротного моментного силового циліндра, золотника з приводом від крокуючого елект родвигуна, з датчика відпрацьованого кута і мікропроцесорної системи керування у вигляді монолітних бло ків, який відрізняється тим, що у корпусі встановлено ще один циліндр, вісь якого розташова на під кутом 90 градусів до першого і теж має золотник з приводом від крокуючого електродвигуна та датчик відпрацьованого кута і на кожному між циліндром і рухомою вилкою встановлено підпружинену гальмівну колодку з електромагнітним приводом, а також спільну мікропроцесорну систему керуван ня. В.Ш. На щоці вилки жорстко закріплено датчики кута (СКВТ) 24,25 ( на щоці рухомої вилки 20, котру не видно), ротори котрих жорстко пов'язані з валами. Колодочні гальма складаються із електрокотушок 26,27, нерухо мих сердечників 28,29, рухомих гальмівних колодок 30,31 і пружин 35,36, котрі притискують колодки до пневмоциліндрів. (13) 723 (11) UA Вказана задача вирішується таким чином, що у спільному корпусі шарнірного привода встановлено ще один циліндр, вісь якого розташована під кутом 90 градусів до першого і теж має золотник з приводом від крокуючого електродвигуна та датчик відпрацьованого кута і на кожному між циліндром і рухомою вилкою вста новлено підпружинену гальмівну колодку з електромагнітним приводом, а також спільну мікропроцесорну систему керування. На фіг. 1 представлено шарнірний привід,загальний вигляд , на фіг. 2 – мікропроцесорна система керуван ня. Шарнірний привід складається із корпуса 1, циліндрів 2,3, осі котрих розташовані під кутом 90 градусів, дво х золотників 4,5, що знаходяться у нейтральному положенні, з крокуючими електродвигуна ми до них 6,7, штуцерів підводу стиснутого газу 8,9, монолітних блоків мікропроцесорної системи керування 10,11,12,13, колодкових гальм 14,15. Циліндри мають рушійні лопаті 16,17, які жорстко пов'язані з валами 18,19, котрі в свою чергу жорстко пов'язані з рухомими вилками 20,21, з фланцями 22,23, котрі використовуються для поєднання у ланки маніпулятора. (19) Корисна модель належить до машинобудування, а саме до приводів маніпуляторів і промислових роботів, робочий орган котрих складається із шарнірних ланок, а також може бути ви користаний у протезуванні. Відомий "Модуль шарніра"(А.с.СРСР № 980979, В25J 17/00), що складається із неповноповоротного моментного силового циліндра, пов'язаного з ланкою, наприклад, маніпулятора, і, з метою підвищення точності позиціювання і жорсткості фіксації проміжних положень елементів модуля, оснащений розташованою на корпусі підпружиненою відносно нього тормозною колодкою, яка має можливість взаємодії з корпусом моментного силового циліндра,а у валу цього циліндра виконана порожнина, в котрій змонтовано золотник з приводом . Відомий "Шарнірний привід" ( Рі шення про видачу патенту України на корисну модель від 18 травня 2000 р., реєстраційний номер заявки 98126597/К), що складається із корпуса неповноповоротного моментного силового циліндра,золотника з приводом від крокуючого електродвигуна, датчика відпрацьованого кута ти пу си нусно-косинусного трансформатора (СКВТ) плоскої конструкції, мікропроцесорної системи керування у вигляді монолітних блоків (прототип). Але "Шарнірний привід" не може бути пневматичним приводом маніпулятора тому, що під дією навантаження "сповзатиме" з відпрацьованого кута через стиснення робочого газу у його циліндрах. Задача полягає у створенні слідкуючого пневмопривода двокоординатної конструкції з мікропроцесорною систе мою керування. U ______________________________ 723 Мікропроцесорна система керування (фіг.2) складається із переважно однокристальних мікросхем серійного і замовного ви готовлення: мікроЕОМ 37, переривника програм 38, інтерфей сів 39,40, комутаторів крокуючих електродви гунів 41, 42, керованих генераторів 43,44, аналого-числових перетворювачів (АЧП) 45,46, підсилювачів імпульсів 47,48,49,50. Мо дуль шарніра працює та ким чином. При подачі тиску га зу до пневмоциліндрів 2,3, а саме до золотників 4,5 через штуцери 8,9 від зовнішнього блока пневможивлення (не показано ) і електроживлення на монолітні блоки 10,11,12,13 мікропроцесорної системи керуван ня модуль шарніра готовий для сприйняття команди на рух від зовнішнього блока управління. Команда на рух потрапляє у блок 11 до мікро-ЕОМ 37, де розшифровуєть ся і вибирається програма з пам'яті , котру мікро-ЕОМ починає вивиконува ти. Програма управління від мікро-ЕОМ проходить схе му переривника програм 38, а далі по двох каналах – на інтерфейси 39, 40. Одночасно генератори імпульсів 43,44 через свої підсилювачі 49,50 подають на електрокотушки 26,27 гальм 14,15 імпульси відповідної амплітуди і частоти і примушують вібрувати гальмівні колодки 30,31, які звільняють від загальмованого ста ну пневмоциліндри, і вони рухаються на заданий кут. Одночасно з рухом вилок 20,21 починають обертатись і статори СКОТ 24,25 відносно своїх роторів і при цьому ви дають кутову інфор мацію, яка через АЧП 45,46 потрапляє до інтерфейсів 39,40, а далі до мікро-ЕОМ 37, котра порівнює відпрацьований кут з поданою командою і при їх рівності виводить золотники 4,5 у нейтральне положення, а також припиняє роботу ге нераторів імпульсів 45,44,і пружини 35,36 притискують колодки 30,31 до пневмоциліндрів 2,3, загальмовується рух вилок 20,21, фланців 22,23 і відповідних ланок маніпулятора. Відповідною програмою передбачена робота тільки одного циліндра або двох одночасно, як описано вище, і з різними напрямами рухів. Шарнірні приводи двокоординатної конструкції забезпечують більш жорстку маніпуляційну систему у порівнянні з однокоординатними і потребують меншої кількості кріплень між ланками маніпулятора , зменшеної кількості монолітних блоків мікропроцесорної системи керування, чим зменшують ва гу і вартість маніпулятора. Для виготовлення мікропроцесорної слідкуючої системи керування можуть бути засто совані серійні мікропроцесорні комплекти як вітчизняного виробництва, так і зарубіжного постачання. Експериментальне виготовлення і розрахунки показали, що запропонований модуль шарніра у серійному ва ріанті може коштувати не вище 200300 доларів. Від кожного інтерфей са імпульси управління знову поділяються на два канали, по одному до комутаторів 41,42, а по другому – до керованих генераторів 43,44. Комута тори формують серію імпульсів відповідного напряму обертання і через підсилювачі 47,48 передають на крокуючі електродвигуни 6,7, котрі через передачу гвинт–гайка зміщують золотники 4,5 з нейтралі, і стиснутий газ через канали золотника потрапляє у відповідну камеру циліндрів 2,3, тисне на лопаті 16,17, котрі обертають вали 18,19, а з ними і вилки 20,21 з фланцями приєднання 22,23, а ті рухають і ланки маніпулятора. 2 723 Фіг. 1 3 723 Фіг. 2 Тираж 50 екз. Відкрите акціонерне товариство «Патент» Україна, 88000, м. Ужгород, вул. Гагаріна, 101 (03122) 3 – 72 – 89 (03122) 2 – 57 – 03 4 723 5
ДивитисяДодаткова інформація
Назва патенту англійськоюHinge drive
Автори англійськоюPurish Valentyn Zakharovych, Purysh Valentyn Zakharovych, Koroliov Serhii Mykhailovych, Koroliova Halyna Valentynivna
Назва патенту російськоюШарнирный привод
Автори російськоюПуриш Валентин Захарович, Королев Сергей Михайлович, Королева Галина Валентиновна
МПК / Мітки
МПК: B25J 17/00
Код посилання
<a href="https://ua.patents.su/5-723-sharnirnijj-privid.html" target="_blank" rel="follow" title="База патентів України">Шарнірний привід</a>
Шарнірний привід

Номер патенту: 578
Опубліковано: 16.10.2000
Автори: Корольов Сергій Михайлович, Бойченко Тамара Михайлівна, Пуриш Валентин Захарович
МПК: B25J 17/00
Формула / Реферат:
1. Шарнірний привід, що складається із корпуса, неповноповоротного моментного силового циліндра, золотника, приводу золотника, який відрізняється тим, що як привід золотника застосовано крокуючий електродвигун.2. Шарнірний привід по п. 1, який відрізняється тим, що він оснащений датчиком відпрацьованого кута.3. Шарнірний привід по п. 2, який відрізняється тим, що датчики відпрацьованого кута застосовано синусно-косинусний...
Плодознімач шарнірний
Номер патенту: 32719
Опубліковано: 15.02.2001
Автор: Ліхцов Михайло Степанович
МПК: A01D 46/24
Мітки: шарнірний, плодознімач
Формула / Реферат:
1. Плодознімач шарнірний для збирання фруктів, що має розміщені на жердині захвати у вигляді гумових кілець і тягу, відрізняється тим, що захвати з шарнірним механізмом розміщено у плоскому здвоєному трикутному корпусі, подовженому циліндричним ложементом, який жорстко поєднаний з трубчастою жердиною, причому всередині ложемента, на важелі, міститься пружина повернення захватів у розкрите положення, а важіль захватів з’єднаний дротяною чи...
Привід верстату
Номер патенту: 34966
Опубліковано: 15.03.2001
Автори: Кириченко Андрій Миколайович, Крижанівський Володимир Андрійович, Пестунов Володимир Михайлович
МПК: B23Q 37/00, B23B 47/00
Формула / Реферат:
1. Привід верстату, що містить силовий стіл із встановленою на ньому багатошпиндельною револьверною головкою та розташованою в ланцюгу головного руху гвинтовою несамогальмівною передачею, зв'язаною з механізмом подачі, який відрізняється тим, що гвинтові передачі кінематичного ланцюга головного руху та подачі розташовані паралельно та охоплюють робочий шпиндель револьверної головки, а гвинтова передача привода головного руху споряджена...
Пневматичний привід резонансної вібраційної машини
Номер патенту: 31217
Опубліковано: 15.12.2000
Автор: Шовкун Олександр Павлович
МПК: B65G 27/10
Мітки: резонансної, вібраційної, машини, привід, пневматичний
Текст:
...з клапанною камерою каналом, виконаним в штоці клапана і перепускний дросель, утворений конічною сідловиною цього канала і конічною поверхнею штифта, встановленого в управляючий камері з можливістю осьового переміщення (див. АС. СССР N 1178665 кл. В 65 G27/22 опубл. 15.09.1985р., Еюл. N34). До недоліків вкззанного приводу слід віднести неможливість реалізапіі резонансного режиму роботи, в зв'язку з тим, що частота власних коливань...
Шарнірний верхняк
Номер патенту: 15845
Опубліковано: 30.06.1997
Автори: Касьянов Володимир Валентинович, Осипчук Виктор Васильович, Шестов Петро Іванович, Щеглов Микола Пилипович, Нажа Іван Юхімович
МПК: E21D 17/00
Формула / Реферат:
Шарнирный верхняк, включающий балку с вилкой и проушиной на концах, которые имеют отверстия под штырь и клин, отличающийся тем, что щеки вилки выполнены из вертикальных полок балки верхняка, а расстояние от центра отверстия под штырь в проушине до наиболее удаленной от него точки торцевой ее части выполнено меньшим, чем расстояние от центра этого отверстия до верхней плоскости верхней полки балки верхняка.