Магнітно-струменевий захоплювач
Номер патенту: 74273
Опубліковано: 25.10.2012
Автори: Савків Володимир Богданович, Бігус Володимир Вікторович, Скочиляс Віктор Володимирович, Проць Ярослав Іванович, Федорів Петро Степанович
Формула / Реферат
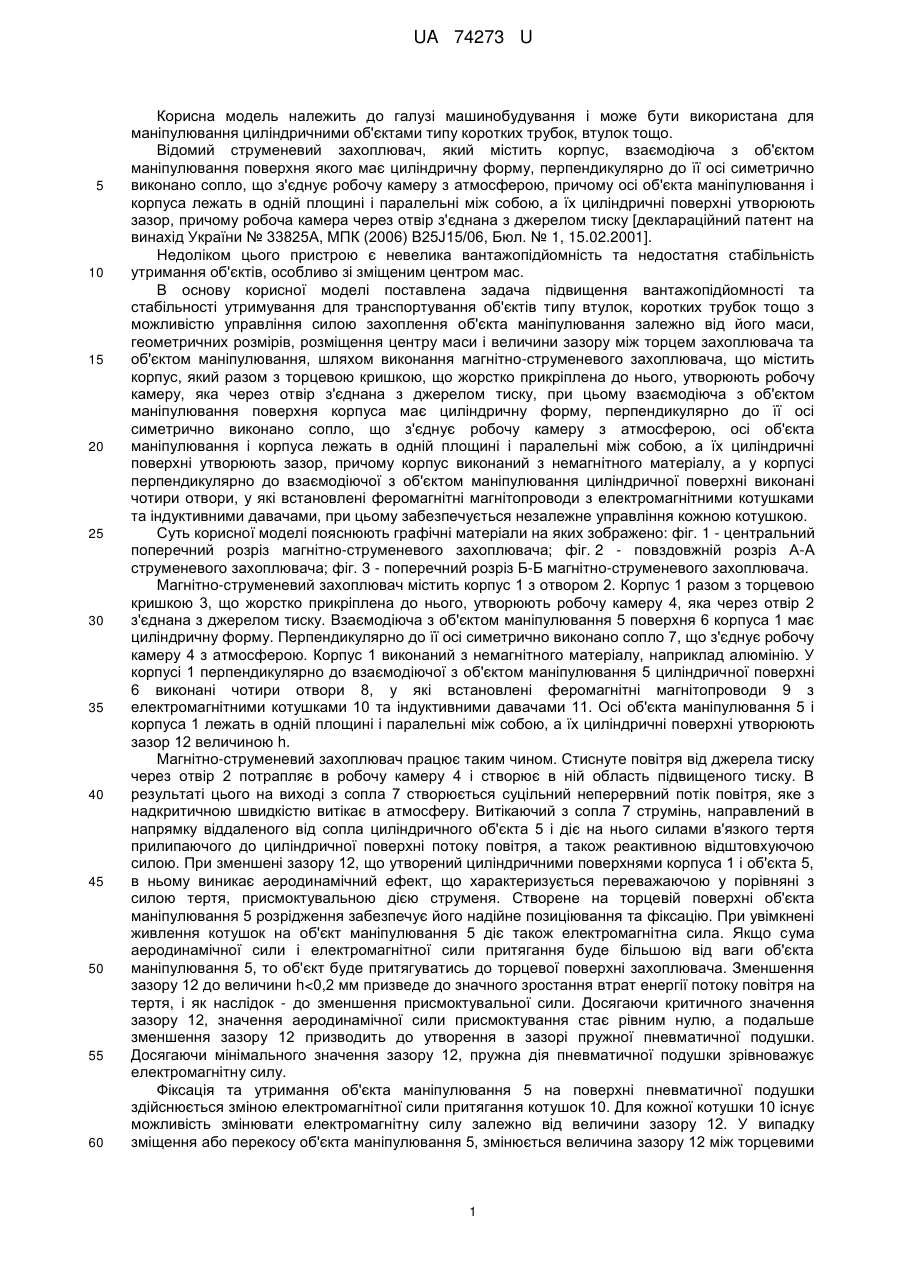
Магнітно-струменевий захоплювач, що містить корпус, який разом з торцевою кришкою, що жорстко прикріплена до нього, утворює робочу камеру, яка через отвір з'єднана з джерелом тиску, при цьому взаємодіюча з об'єктом маніпулювання поверхня корпуса має циліндричну форму, перпендикулярно до її осі симетрично виконано сопло, що з'єднує робочу камеру з атмосферою, осі об'єкта маніпулювання і корпуса лежать в одній площині і паралельні між собою, а їх циліндричні поверхні утворюють зазор, який відрізняється тим, що корпус виконаний з немагнітного матеріалу, а у корпусі перпендикулярно до взаємодіючої з об'єктом маніпулювання циліндричної поверхні виконані чотири отвори, у які встановлені феромагнітні магнітопроводи з електромагнітними котушками та індуктивними давачами, при цьому забезпечується незалежне управління кожною котушкою.
Текст
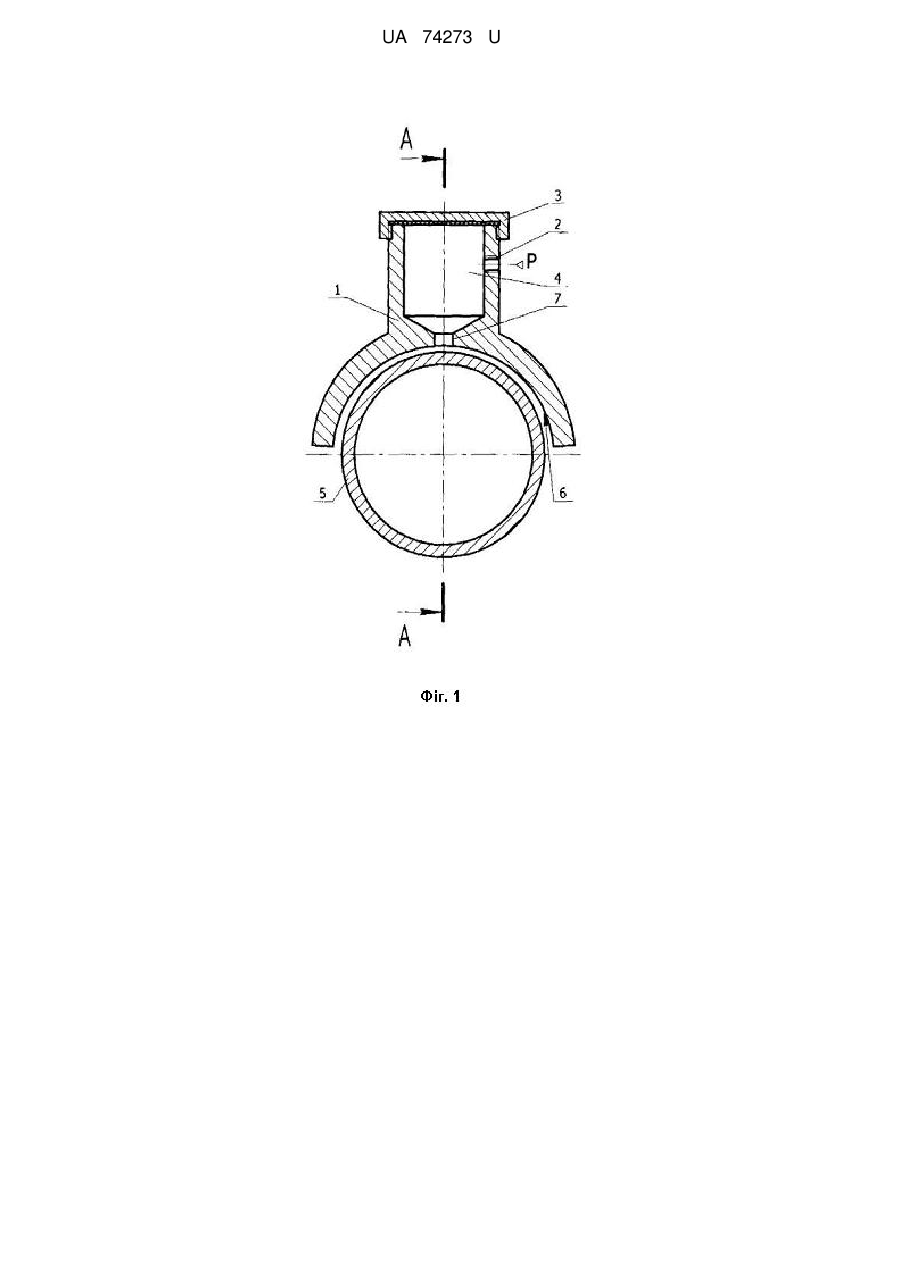
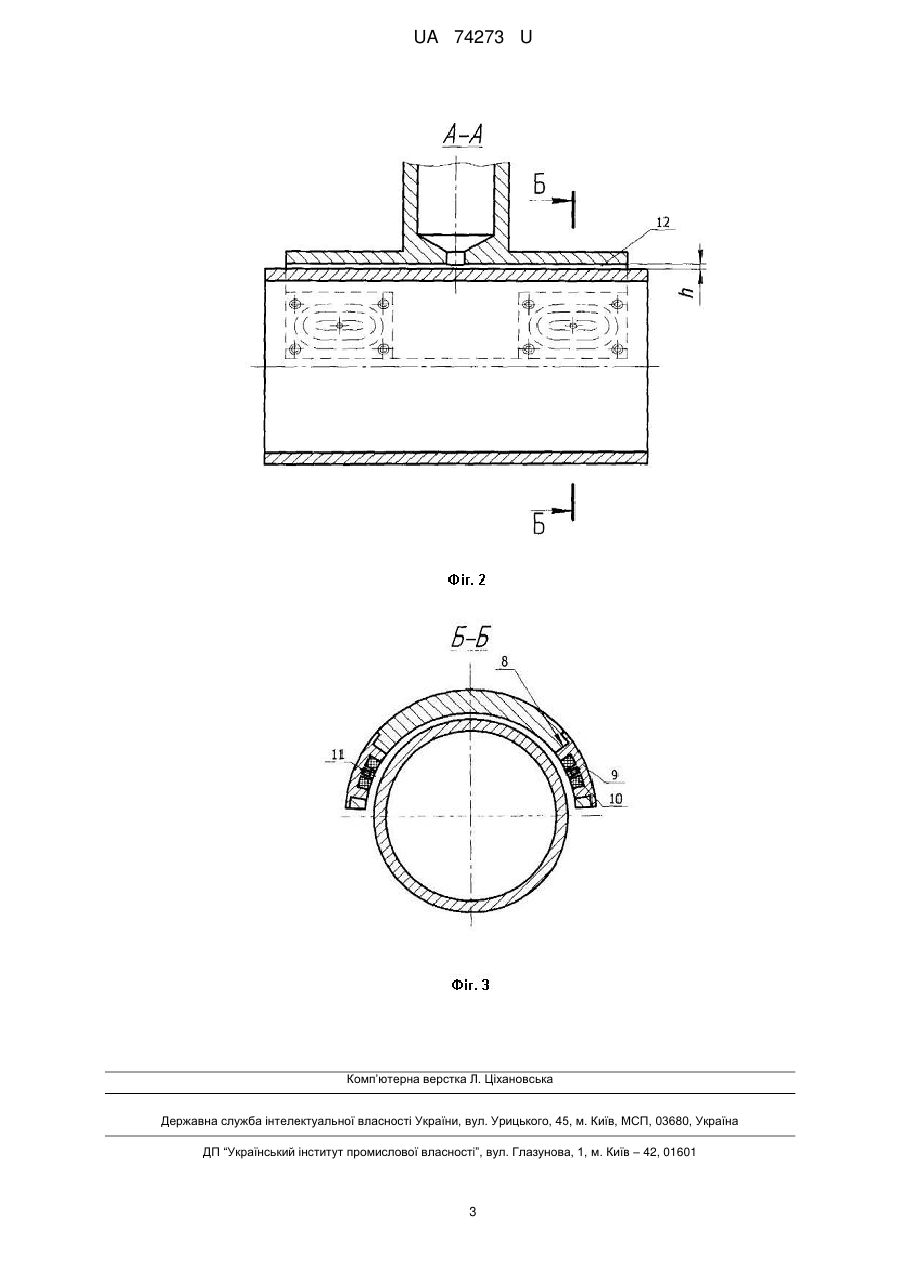
Реферат: Магнітно-струменевий захоплювач містить корпус, який разом з торцевою кришкою утворює робочу камеру, з'єднану з джерелом тиску. Перпендикулярно до осі циліндричної поверхні корпуса симетрично виконано сопло, що з'єднує робочу камеру з атмосферою. Корпус виконаний з немагнітного матеріалу. У корпусі виконані чотири отвори, у які встановлені феромагнітні магнітопроводи з електромагнітними котушками та індуктивними давачами. UA 74273 U (54) МАГНІТНО-СТРУМЕНЕВИЙ ЗАХОПЛЮВАЧ UA 74273 U UA 74273 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до галузі машинобудування і може бути використана для маніпулювання циліндричними об'єктами типу коротких трубок, втулок тощо. Відомий струменевий захоплювач, який містить корпус, взаємодіюча з об'єктом маніпулювання поверхня якого має циліндричну форму, перпендикулярно до її осі симетрично виконано сопло, що з'єднує робочу камеру з атмосферою, причому осі об'єкта маніпулювання і корпуса лежать в одній площині і паралельні між собою, а їх циліндричні поверхні утворюють зазор, причому робоча камера через отвір з'єднана з джерелом тиску [деклараційний патент на винахід України № 33825А, МПК (2006) B25J15/06, Бюл. № 1, 15.02.2001]. Недоліком цього пристрою є невелика вантажопідйомність та недостатня стабільність утримання об'єктів, особливо зі зміщеним центром мас. В основу корисної моделі поставлена задача підвищення вантажопідйомності та стабільності утримування для транспортування об'єктів типу втулок, коротких трубок тощо з можливістю управління силою захоплення об'єкта маніпулювання залежно від його маси, геометричних розмірів, розміщення центру маси і величини зазору між торцем захоплювача та об'єктом маніпулювання, шляхом виконання магнітно-струменевого захоплювача, що містить корпус, який разом з торцевою кришкою, що жорстко прикріплена до нього, утворюють робочу камеру, яка через отвір з'єднана з джерелом тиску, при цьому взаємодіюча з об'єктом маніпулювання поверхня корпуса має циліндричну форму, перпендикулярно до її осі симетрично виконано сопло, що з'єднує робочу камеру з атмосферою, осі об'єкта маніпулювання і корпуса лежать в одній площині і паралельні між собою, а їх циліндричні поверхні утворюють зазор, причому корпус виконаний з немагнітного матеріалу, а у корпусі перпендикулярно до взаємодіючої з об'єктом маніпулювання циліндричної поверхні виконані чотири отвори, у які встановлені феромагнітні магнітопроводи з електромагнітними котушками та індуктивними давачами, при цьому забезпечується незалежне управління кожною котушкою. Суть корисної моделі пояснюють графічні матеріали на яких зображено: фіг. 1 - центральний поперечний розріз магнітно-струменевого захоплювача; фіг. 2 - повздовжній розріз А-А струменевого захоплювача; фіг. 3 - поперечний розріз Б-Б магнітно-струменевого захоплювача. Магнітно-струменевий захоплювач містить корпус 1 з отвором 2. Корпус 1 разом з торцевою кришкою 3, що жорстко прикріплена до нього, утворюють робочу камеру 4, яка через отвір 2 з'єднана з джерелом тиску. Взаємодіюча з об'єктом маніпулювання 5 поверхня 6 корпуса 1 має циліндричну форму. Перпендикулярно до її осі симетрично виконано сопло 7, що з'єднує робочу камеру 4 з атмосферою. Корпус 1 виконаний з немагнітного матеріалу, наприклад алюмінію. У корпусі 1 перпендикулярно до взаємодіючої з об'єктом маніпулювання 5 циліндричної поверхні 6 виконані чотири отвори 8, у які встановлені феромагнітні магнітопроводи 9 з електромагнітними котушками 10 та індуктивними давачами 11. Осі об'єкта маніпулювання 5 і корпуса 1 лежать в одній площині і паралельні між собою, а їх циліндричні поверхні утворюють зазор 12 величиною h. Магнітно-струменевий захоплювач працює таким чином. Стиснуте повітря від джерела тиску через отвір 2 потрапляє в робочу камеру 4 і створює в ній область підвищеного тиску. В результаті цього на виході з сопла 7 створюється суцільний неперервний потік повітря, яке з надкритичною швидкістю витікає в атмосферу. Витікаючий з сопла 7 струмінь, направлений в напрямку віддаленого від сопла циліндричного об'єкта 5 і діє на нього силами в'язкого тертя прилипаючого до циліндричної поверхні потоку повітря, а також реактивною відштовхуючою силою. При зменшені зазору 12, що утворений циліндричними поверхнями корпуса 1 і об'єкта 5, в ньому виникає аеродинамічний ефект, що характеризується переважаючою у порівняні з силою тертя, присмоктувальною дією струменя. Створене на торцевій поверхні об'єкта маніпулювання 5 розрідження забезпечує його надійне позиціювання тафіксацію. При увімкнені живлення котушок на об'єкт маніпулювання 5 діє також електромагнітна сила. Якщо сума аеродинамічної сили і електромагнітної сили притягання буде більшою від ваги об'єкта маніпулювання 5, то об'єкт буде притягуватись до торцевої поверхні захоплювача. Зменшення зазору 12 до величини h
ДивитисяДодаткова інформація
Назва патенту англійськоюMagnetic jet gripper
Автори англійськоюSavkiv Volodymyr Bohdanovych, Prots Yaroslav Ivanovych, Skochylias Viktor Volodymyrovych, Bihus Volodymyr Viktorovych, Fedoriv Petro Stepanovych
Назва патенту російськоюМагнитно-струйный захват
Автори російськоюСавкив Владимир Богданович, Проц Ярослав Иванович, Скочиляс Виктор Владимирович, Бигус Владимир Викторович, Федорив Петр Степанович
МПК / Мітки
МПК: B25J 15/06
Мітки: захоплювач, магнітно-струменевий
Код посилання
<a href="https://ua.patents.su/5-74273-magnitno-strumenevijj-zakhoplyuvach.html" target="_blank" rel="follow" title="База патентів України">Магнітно-струменевий захоплювач</a>
Струминний захоплювач

Номер патенту: 32348
Опубліковано: 15.12.2000
Автори: Лобур Тарас Богданович, Проць Ярослав Іванович, Козбур Ігор Романович, Савків Володимир Богданович
МПК: B25J 15/06
Мітки: захоплювач, струминний
Текст:
...позиціювання і вантажопідйомність захоплювача-присоса, шляхом виконання взаємодіючої з об'єктом поверхні корпуса циліндричноїформи, а його порожнину перекриває секторна вставка, утворюєм замкнуту просторову щілину, що з'єднує порожнину корпуса з атмосферою, що дозволить розширити технологічні властивості струменевогого захоплювача і підвищить його коефіцієнт корисної дії. Суть винаходу пояснюють графічні матеріали на яких зображено: фіг. 1 -...
Струминний захоплювач

Номер патенту: 32349
Опубліковано: 15.12.2000
Автори: Лобур Тарас Богданович, Савків Володимир Богданович, Козбур Ігор Романович, Проць Ярослав Іванович
МПК: B25J 15/06
Мітки: струминний, захоплювач
Текст:
...повітря, зумовлює обмежену площу охоплення струменем зовнішньої сферичної поверхні об'єкта, що призводить до низької вантажопідйомності і точності центрування в результаті малої дії аеродинамічного ефекту. В основу винаходу поставлено задачу шдаищити точність позиціювання і вантажопідйомність захоплювача-присоса при маніпулюванні об'єктами з яскраво вираженою сферичною поверхнею, шляхом виконання на торці корпуса порожнини сферичної форми з...
Струменевий захоплювальний пристрій
Номер патенту: 65052
Опубліковано: 25.11.2011
Автори: Савків Володимир Богданович, Скочиляс Віктор Володимирович, Бігус Володимир Вікторович
МПК: B25J 15/00
Мітки: пристрій, захоплювальний, струменевий
Формула / Реферат:
Струменевий захоплювальний пристрій, який містить корпус, взаємодіюча з об'єктом маніпулювання поверхня якого має циліндричну форму, перпендикулярно до її осі симетрично виконано сопло, що з'єднує робочу камеру з атмосферою, причому осі об'єкта маніпулювання і корпусу лежать в одній площині і паралельні між собою, а їх циліндричні поверхні утворюють зазор, причому робоча камера через отвір з'єднана з джерелом тиску, який відрізняється тим,...
Струменевий захоплювально-орієнтуючий пристрій
Номер патенту: 70381
Опубліковано: 11.06.2012
Автори: Бігус Володимир Вікторович, Савків Володимир Богданович, Скочиляс Віктор Володимирович
МПК: B25J 15/00
Мітки: струменевий, захоплювально-орієнтуючий, пристрій
Формула / Реферат:
Струменевий захоплювально-орієнтуючий пристрій, який містить корпус, взаємодіюча з об'єктом маніпулювання поверхня якого має циліндричну форму, перпендикулярно до її осі симетрично виконано сопло, що з'єднує робочу камеру з атмосферою, причому осі об'єкта маніпулювання і корпусу лежать в одній площині і паралельні між собою, а їх циліндричні поверхні утворюють зазор, причому робоча камера через отвір з'єднана з джерелом тиску, корпус...
Захоплювач вантажу
Номер патенту: 68879
Опубліковано: 10.04.2012
Автор: Мікульонок Ігор Олегович
МПК: B66C 1/44
Мітки: вантажу, захоплювач
Формула / Реферат:
Захоплювач вантажу, що містить паралельно розміщені силовий і стопорний вертикальні елементи, шарнірно з'єднані між собою проміжними ланками, що утворюють з вертикальними елементами систему паралелограмів, при цьому силовий вертикальний елемент споряджено зачепом, який відрізняється тим, що стопорний вертикальний елемент також споряджено зачепом.
Попередній патент: Спосіб визначення достатньої протимікробної активності лікарських засобів до біоплівок грибів
Наступний патент: Спосіб інгібування активності біоплівок грибів candida albicans
Випадковий патент: Аналого-цифровий перетворювач