Струменевий захоплювально-орієнтуючий пристрій
Номер патенту: 70381
Опубліковано: 11.06.2012
Автори: Савків Володимир Богданович, Бігус Володимир Вікторович, Скочиляс Віктор Володимирович

Формула / Реферат
Струменевий захоплювально-орієнтуючий пристрій, який містить корпус, взаємодіюча з об'єктом маніпулювання поверхня якого має циліндричну форму, перпендикулярно до її осі симетрично виконано сопло, що з'єднує робочу камеру з атмосферою, причому осі об'єкта маніпулювання і корпусу лежать в одній площині і паралельні між собою, а їх циліндричні поверхні утворюють зазор, причому робоча камера через отвір з'єднана з джерелом тиску, корпус оснащений додатковою робочою камерою і додатковим соплом, що розміщені симетрично до робочої камери і сопла відносно поздовжнього паза, що виконаний посередині взаємодіючої із об'єктом маніпулювання поверхні, причому камери з'єднані між собою трубкою для нагнітання стиснутого повітря, а робоча камера оснащена шарніром, який відрізняється тим, що додаткове сопло виконане таким чином, що відрізок його твірної і перпендикуляр, опущений з основи цього відрізка до осі корпуса, утворюють кут ά=15…45°.
Текст
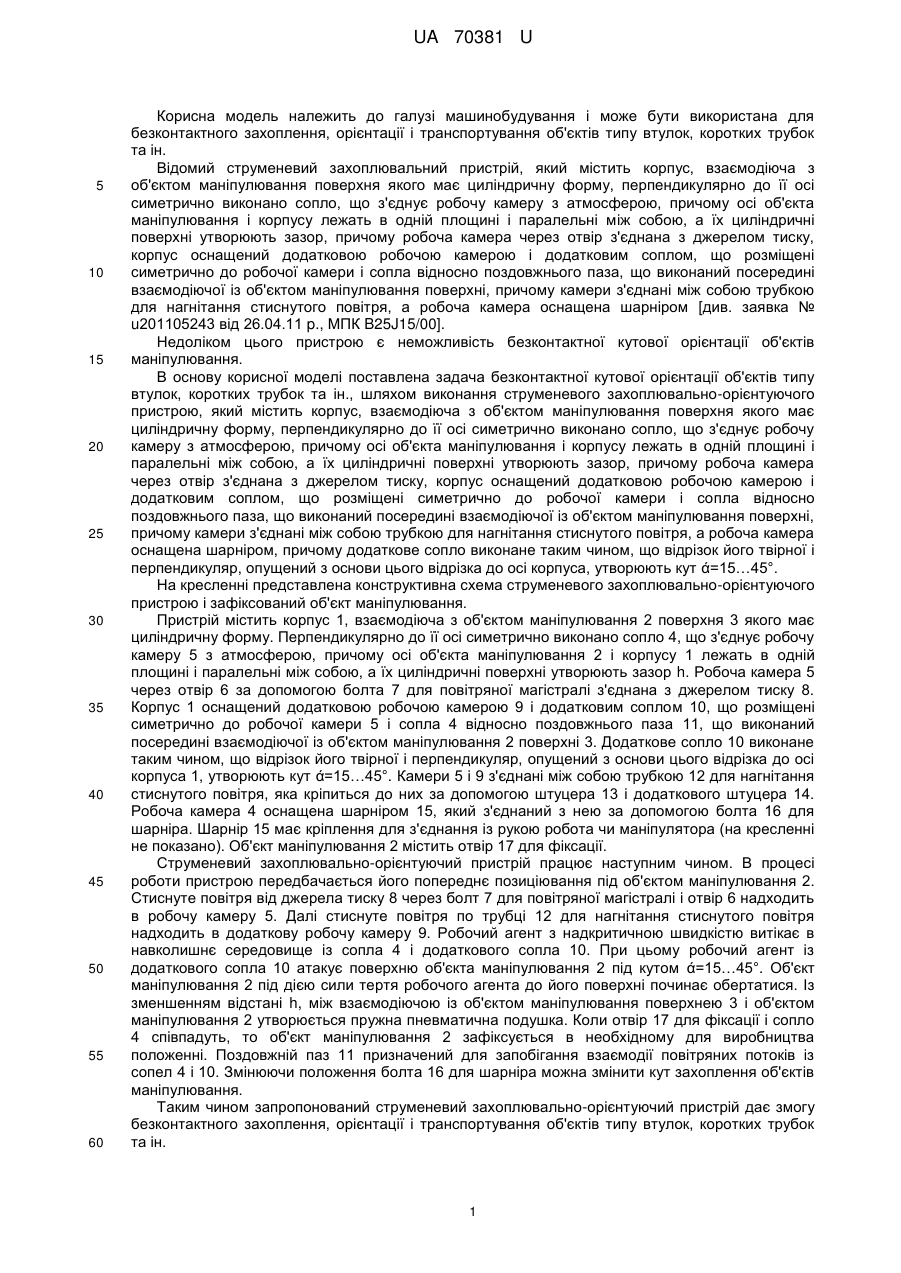
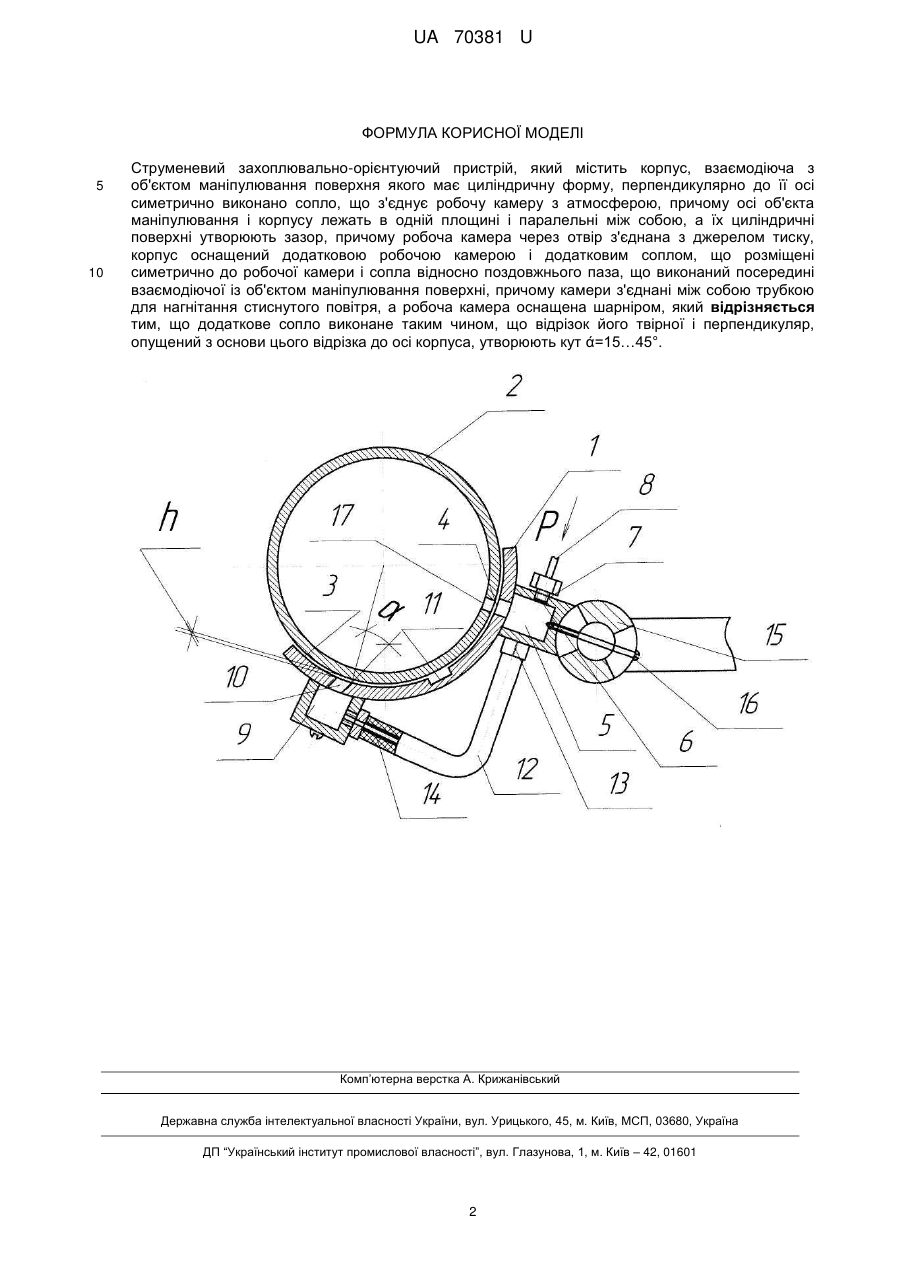
Реферат: UA 70381 U UA 70381 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до галузі машинобудування і може бути використана для безконтактного захоплення, орієнтації і транспортування об'єктів типу втулок, коротких трубок та ін. Відомий струменевий захоплювальний пристрій, який містить корпус, взаємодіюча з об'єктом маніпулювання поверхня якого має циліндричну форму, перпендикулярно до її осі симетрично виконано сопло, що з'єднує робочу камеру з атмосферою, причому осі об'єкта маніпулювання і корпусу лежать в одній площині і паралельні між собою, а їх циліндричні поверхні утворюють зазор, причому робоча камера через отвір з'єднана з джерелом тиску, корпус оснащений додатковою робочою камерою і додатковим соплом, що розміщені симетрично до робочої камери і сопла відносно поздовжнього паза, що виконаний посередині взаємодіючої із об'єктом маніпулювання поверхні, причому камери з'єднані між собою трубкою для нагнітання стиснутого повітря, а робоча камера оснащена шарніром [див. заявка № u201105243 від 26.04.11 p., МПК B25J15/00]. Недоліком цього пристрою є неможливість безконтактної кутової орієнтації об'єктів маніпулювання. В основу корисної моделі поставлена задача безконтактної кутової орієнтації об'єктів типу втулок, коротких трубок та ін., шляхом виконання струменевого захоплювально-орієнтуючого пристрою, який містить корпус, взаємодіюча з об'єктом маніпулювання поверхня якого має циліндричну форму, перпендикулярно до її осі симетрично виконано сопло, що з'єднує робочу камеру з атмосферою, причому осі об'єкта маніпулювання і корпусу лежать в одній площині і паралельні між собою, а їх циліндричні поверхні утворюють зазор, причому робоча камера через отвір з'єднана з джерелом тиску, корпус оснащений додатковою робочою камерою і додатковим соплом, що розміщені симетрично до робочої камери і сопла відносно поздовжнього паза, що виконаний посередині взаємодіючої із об'єктом маніпулювання поверхні, причому камери з'єднані між собою трубкою для нагнітання стиснутого повітря, а робоча камера оснащена шарніром, причому додаткове сопло виконане таким чином, що відрізок його твірної і перпендикуляр, опущений з основи цього відрізка до осі корпуса, утворюють кут ά=15…45°. На кресленні представлена конструктивна схема струменевого захоплювально-орієнтуючого пристрою і зафіксований об'єкт маніпулювання. Пристрій містить корпус 1, взаємодіюча з об'єктом маніпулювання 2 поверхня 3 якого має циліндричну форму. Перпендикулярно до її осі симетрично виконано сопло 4, що з'єднує робочу камеру 5 з атмосферою, причому осі об'єкта маніпулювання 2 і корпусу 1 лежать в одній площині і паралельні між собою, а їх циліндричні поверхні утворюють зазор h. Робоча камера 5 через отвір 6 за допомогою болта 7 для повітряної магістралі з'єднана з джерелом тиску 8. Корпус 1 оснащений додатковою робочою камерою 9 і додатковим соплом 10, що розміщені симетрично до робочої камери 5 і сопла 4 відносно поздовжнього паза 11, що виконаний посередині взаємодіючої із об'єктом маніпулювання 2 поверхні 3. Додаткове сопло 10 виконане таким чином, що відрізок його твірної і перпендикуляр, опущений з основи цього відрізка до осі корпуса 1, утворюють кут ά=15…45°. Камери 5 і 9 з'єднані між собою трубкою 12 для нагнітання стиснутого повітря, яка кріпиться до них за допомогою штуцера 13 і додаткового штуцера 14. Робоча камера 4 оснащена шарніром 15, який з'єднаний з нею за допомогою болта 16 для шарніра. Шарнір 15 має кріплення для з'єднання із рукою робота чи маніпулятора (на кресленні не показано). Об'єкт маніпулювання 2 містить отвір 17 для фіксації. Струменевий захоплювально-орієнтуючий пристрій працює наступним чином. В процесі роботи пристрою передбачається його попереднє позиціювання під об'єктом маніпулювання 2. Стиснуте повітря від джерела тиску 8 через болт 7 для повітряної магістралі і отвір 6 надходить в робочу камеру 5. Далі стиснуте повітря по трубці 12 для нагнітання стиснутого повітря надходить в додаткову робочу камеру 9. Робочий агент з надкритичною швидкістю витікає в навколишнє середовище із сопла 4 і додаткового сопла 10. При цьому робочий агент із додаткового сопла 10 атакує поверхню об'єкта маніпулювання 2 під кутом ά=15…45°. Об'єкт маніпулювання 2 під дією сили тертя робочого агента до його поверхні починає обертатися. Із зменшенням відстані h, між взаємодіючою із об'єктом маніпулювання поверхнею 3 і об'єктом маніпулювання 2 утворюється пружна пневматична подушка. Коли отвір 17 для фіксації і сопло 4 співпадуть, то об'єкт маніпулювання 2 зафіксується в необхідному для виробництва положенні. Поздовжній паз 11 призначений для запобігання взаємодії повітряних потоків із сопел 4 і 10. Змінюючи положення болта 16 для шарніра можна змінити кут захоплення об'єктів маніпулювання. Таким чином запропонований струменевий захоплювально-орієнтуючий пристрій дає змогу безконтактного захоплення, орієнтації і транспортування об'єктів типу втулок, коротких трубок та ін. 1 UA 70381 U ФОРМУЛА КОРИСНОЇ МОДЕЛІ 5 10 Струменевий захоплювально-орієнтуючий пристрій, який містить корпус, взаємодіюча з об'єктом маніпулювання поверхня якого має циліндричну форму, перпендикулярно до її осі симетрично виконано сопло, що з'єднує робочу камеру з атмосферою, причому осі об'єкта маніпулювання і корпусу лежать в одній площині і паралельні між собою, а їх циліндричні поверхні утворюють зазор, причому робоча камера через отвір з'єднана з джерелом тиску, корпус оснащений додатковою робочою камерою і додатковим соплом, що розміщені симетрично до робочої камери і сопла відносно поздовжнього паза, що виконаний посередині взаємодіючої із об'єктом маніпулювання поверхні, причому камери з'єднані між собою трубкою для нагнітання стиснутого повітря, а робоча камера оснащена шарніром, який відрізняється тим, що додаткове сопло виконане таким чином, що відрізок його твірної і перпендикуляр, опущений з основи цього відрізка до осі корпуса, утворюють кут ά=15…45°. Комп’ютерна верстка А. Крижанівський Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 2
ДивитисяДодаткова інформація
Назва патенту англійськоюJet gripping-orienting device
Автори англійськоюSavkiv Volodymyr Bohdanovych, Bihus Volodymyr Viktorovych, Skochylias Viktor Volodymyrovych
Назва патенту російськоюСтруйное захватно-ориентирующее устройство
Автори російськоюСавкив Владимир Богданович, Бигус Владимир Викторович, Скочиляс Виктор Владимирович
МПК / Мітки
МПК: B25J 15/00
Мітки: пристрій, захоплювально-орієнтуючий, струменевий
Код посилання
<a href="https://ua.patents.su/4-70381-strumenevijj-zakhoplyuvalno-oriehntuyuchijj-pristrijj.html" target="_blank" rel="follow" title="База патентів України">Струменевий захоплювально-орієнтуючий пристрій</a>
Струменевий захоплювальний пристрій
Номер патенту: 65052
Опубліковано: 25.11.2011
Автори: Бігус Володимир Вікторович, Скочиляс Віктор Володимирович, Савків Володимир Богданович
МПК: B25J 15/00
Мітки: струменевий, захоплювальний, пристрій
Формула / Реферат:
Струменевий захоплювальний пристрій, який містить корпус, взаємодіюча з об'єктом маніпулювання поверхня якого має циліндричну форму, перпендикулярно до її осі симетрично виконано сопло, що з'єднує робочу камеру з атмосферою, причому осі об'єкта маніпулювання і корпусу лежать в одній площині і паралельні між собою, а їх циліндричні поверхні утворюють зазор, причому робоча камера через отвір з'єднана з джерелом тиску, який відрізняється тим,...
Струменевий насос
Номер патенту: 642
Опубліковано: 15.12.1993
Автори: Смоляков Микола Олександрович, Гайдар Олександр Іванович
МПК: F04F 5/14
Мітки: струменевий, насос
Формула / Реферат:
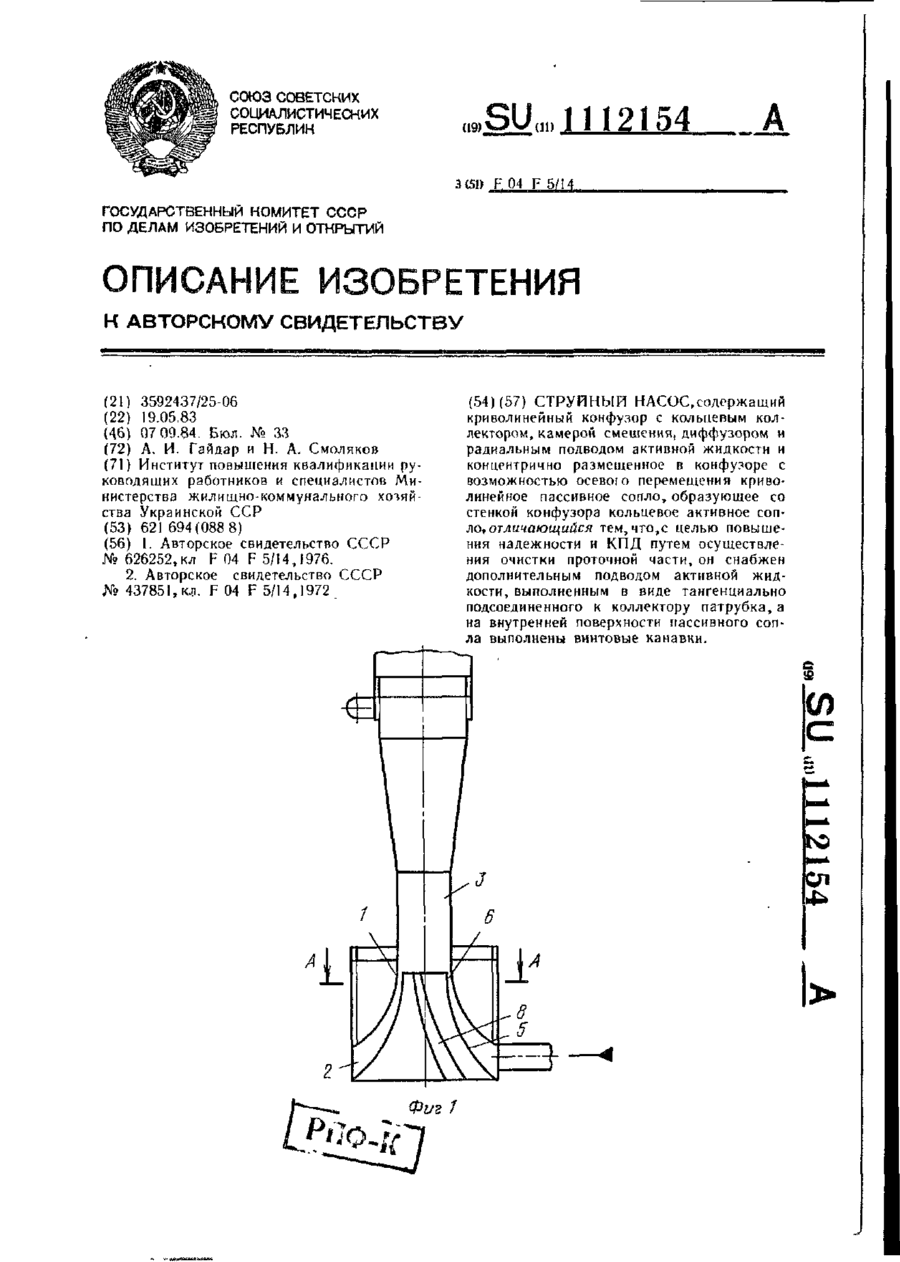
(57) Струйный насос, содержащий криволинейный конфузор с кольцевым коллектором, камерой смешения, диффузором и радиальным подводом активной жидкости и концентрично размещенное в конфузоре с возможностью осевого перемещения криволинейное пассивное сопло, образующее со стенкой конфузора кольцевое активное сопло, отличающийся тем, что, с целью повышения надежности и КПД путем осуществления очистки проточной части, он снабжен дополнительным...
Струменевий насос
Номер патенту: 641
Опубліковано: 15.12.1993
Автори: Сліпченко Володимир Олександрович, Якимець Микола Іванович, Гайдар Олександр Іванович, Альошич Микола Костянтинович
МПК: F04F 5/10
Мітки: насос, струменевий
Формула / Реферат:
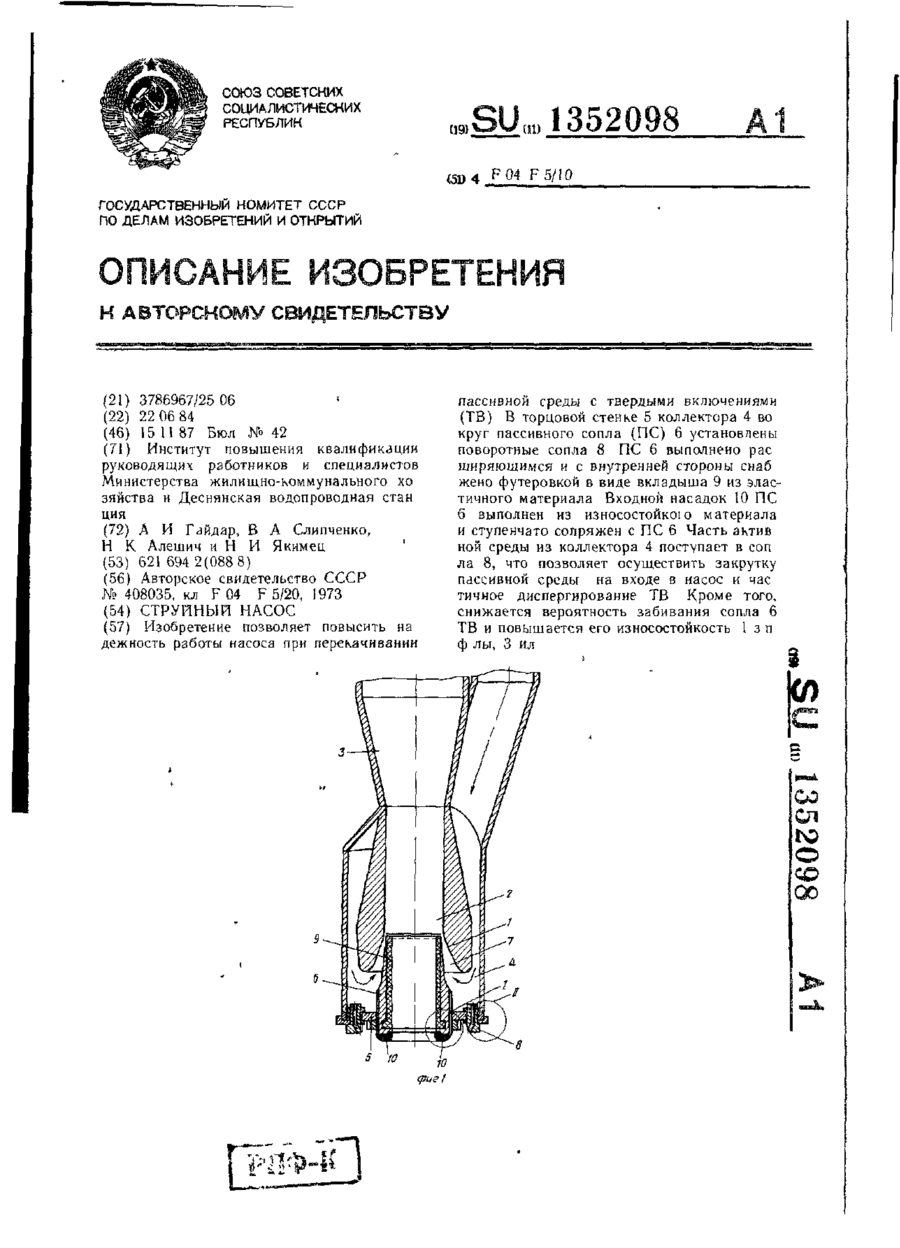
Формула изобретения1. Струйный насос, содержащий сооснорасположенные криволинейный конфузор, камеру смешения и диффузор, кольцевой коллектор и установленное в его торцовой стенке с возможностью осевого перемещения пассивное сопло, образующее с конфузором кольцевое активное сопло, отличающийся тем, что, с целью повышения надежности работы при перекачивании пассивной среды с твердыми включениями, насос дополнительно содержит поворотные...
Повноповоротний захоплювально-зрізаючий пристрій лісозаготівельної машини
Номер патенту: 46522
Опубліковано: 25.12.2009
Автори: Мельник Василь Андрійович, Божок Аркадій Михайлович
МПК: A01G 23/08
Мітки: машини, повноповоротний, пристрій, лісозаготівельної, захоплювально-зрізаючий
Формула / Реферат:
Повноповоротний захоплювально-зрізаючий пристрій лісозаготівельної машини, що містить поворотну стойку зі змонтованими на ній захоплювачами, зрізаючим органом і висувним упором, який відрізняється тим, що поворотна стойка оснащена механізмом повного повороту її у вертикальній, горизонтальній і проміжних площинах просторової системи координат, виконаним у вигляді привідного порожнистого корпусу, з одного боку шарнірно зв'язаного зі стойкою, а...
Струменевий млин
Номер патенту: 32259
Опубліковано: 15.12.2000
Автори: Гвоздьов Юрій Олександрович, Кисла Любов Василівна, Романова Зоряна Миколаївна, Демченко Ольга Миколаївна
МПК: B02C 19/06
Мітки: млин, струменевий
Текст:
...Запропонована нова конструкція струменевого млина, де процес подрібнення відбувається в помельній камері, в результаті інтенсивного режиму тепло- і масообміну в зонах ударного руйнування і подрібнення, за рахунок того, що продукт поступає в нижню основу робочого колеса з радіально розташованими лопастями і билами, а знизу в помельну камеру подається нагріте повітря. Вище зони ударного руйнування за рахунок вихорового потоку робочого...
Попередній патент: Спосіб виготовлення секційних гвинтових заготовок
Наступний патент: Спосіб виготовлення великогабаритних гвинтових заготовок
Випадковий патент: Спосіб отримання пектину з вторинної картопляної сировини