Посівний комплекс
Номер патенту: 76592
Опубліковано: 15.08.2006
Автори: Поляков Сергій Іванович, Нечуйвітер Леонід Іванович, Черевашенко Сергій Вікторович, Нечуйвітер Володимир Леонідович, Скрипник Інна Андріївна
Формула / Реферат
1. Посівний комплекс, який містить енергетичний засіб для пересування із заднім начіпним обладнанням та валом відбору потужності, начіпну раму із закріпленими на ній стояками з культиваторами-плоскорізами, роторним робочим органом з приводом від вала відбору потужності енергетичного засобу для пересування та механізмами регулювання глибини обробки ґрунту, поперечну балку з висівними агрегатами, яка виконана хвилеподібної форми, осі початку і кінця якої паралельні, агрегатами прикочування та опорними пневматичними колесами зі зміщеними осями обертання відносно вертикальних осей коливання кронштейнів їх кріплення, який відрізняється тим, що на тильній частині начіпної рами та поперечній балці встановлено по одному верхньому та по два нижніх кронштейни шарнірів, відповідні однойменні кронштейни яких з'єднані між собою однією верхньою та двома нижніми тягами, при цьому опорні пневматичні колеса зі зміщеними осями їх обертання відносно вертикальних осей коливання кронштейнів їх кріплення розміщені між начіпною рамою та поперечною балкою, а їх кронштейни вертикальних осей коливання жорстко закріплені на поперечній балці.
2. Посівний комплекс за п. 1, який відрізняється тим, що верхня тяга виконана у вигляді двох важелів з вушками шарнірів на тих їх кінцях, що з'єднані з верхніми кронштейнами шарнірів тильної частини начіпної рами та поперечної балки, а інші кінці цих двох важелів, які взаємодіють між собою, завершені відповідно віссю на одному з двох важелів та втулкою на іншому важелі, і ці кінці із втулкою та віссю є складовими повздовжнього шарніра, в який введено механізм обмеження осьового переміщення осі кінця одного важеля верхньої тяги відносно втулки кінця іншого важеля цієї тяги в обидва боки, при цьому величина вільного осьового переміщення осі відносно втулки, яке регулюється механізмом обмеження їх відносного осьового переміщення, відповідає необхідній величині кута затримки відхилення висівних агрегатів при їх переведені з робочого положення в транспортне.
3. Посівний комплекс за п. 1, який відрізняється тим, що довжина верхньої тяги більша довжини рівних між собою нижніх тяг, при цьому відстань між кронштейнами шарнірів нижніх тяг на тильній частині начіпної рами більша аналогічної відстані між кронштейнами нижніх тяг на поперечній балці.
4. Посівний комплекс за п. 2, який відрізняється тим, що механізм обмеження осьового переміщення осі кінця одного важеля верхньої тяги відносно втулки кінця іншого важеля цієї тяги в обидва боки виконано необхідної довжини та з опорними торцевими поверхнями на кінцях лиски на осі кінця одного важеля верхньої тяги та отвору, в якому розміщено упор, на втулці кінця іншого важеля верхньої тяги, при цьому в транспортному положенні висівних агрегатів права торцева поверхня упору виконана з можливістю контакту з правою торцевою поверхнею лиски вісі важеля верхньої тяги, а в робочому положенні висівних агрегатів ліва торцева поверхня упора виконана з можливістю контакту з лівою торцевою поверхнею лиски осі важеля верхньої тяги.
5. Посівний комплекс за п. 2, який відрізняється тим, що механізм обмеження осьового переміщення осі кінця одного важеля верхньої тяги відносно втулки кінця іншого важеля цієї тяги в обидва боки виконано у вигляді двох симетричних відносно поздовжньої площини симетрії верхньої тяги, необхідної довжини та з опорними торцевими поверхнями на кінцях лисок на осі кінця одного важеля верхньої тяги та двох симетричних відносно повздовжньої площини симетрії верхньої тяги отворів, в кожному з яких розміщено по упору, втулки кінця іншого важеля верхньої тяги, при цьому в транспортному положенні висівних агрегатів праві торцеві поверхні обох упорів контактують з правими торцевими поверхнями лисок осі одного з важелів верхньої тяги, а в робочому положенні висівних агрегатів ліві торцеві поверхні упорів контактують з лівими торцевими поверхнями лисок осі важеля верхньої тяги.
Текст
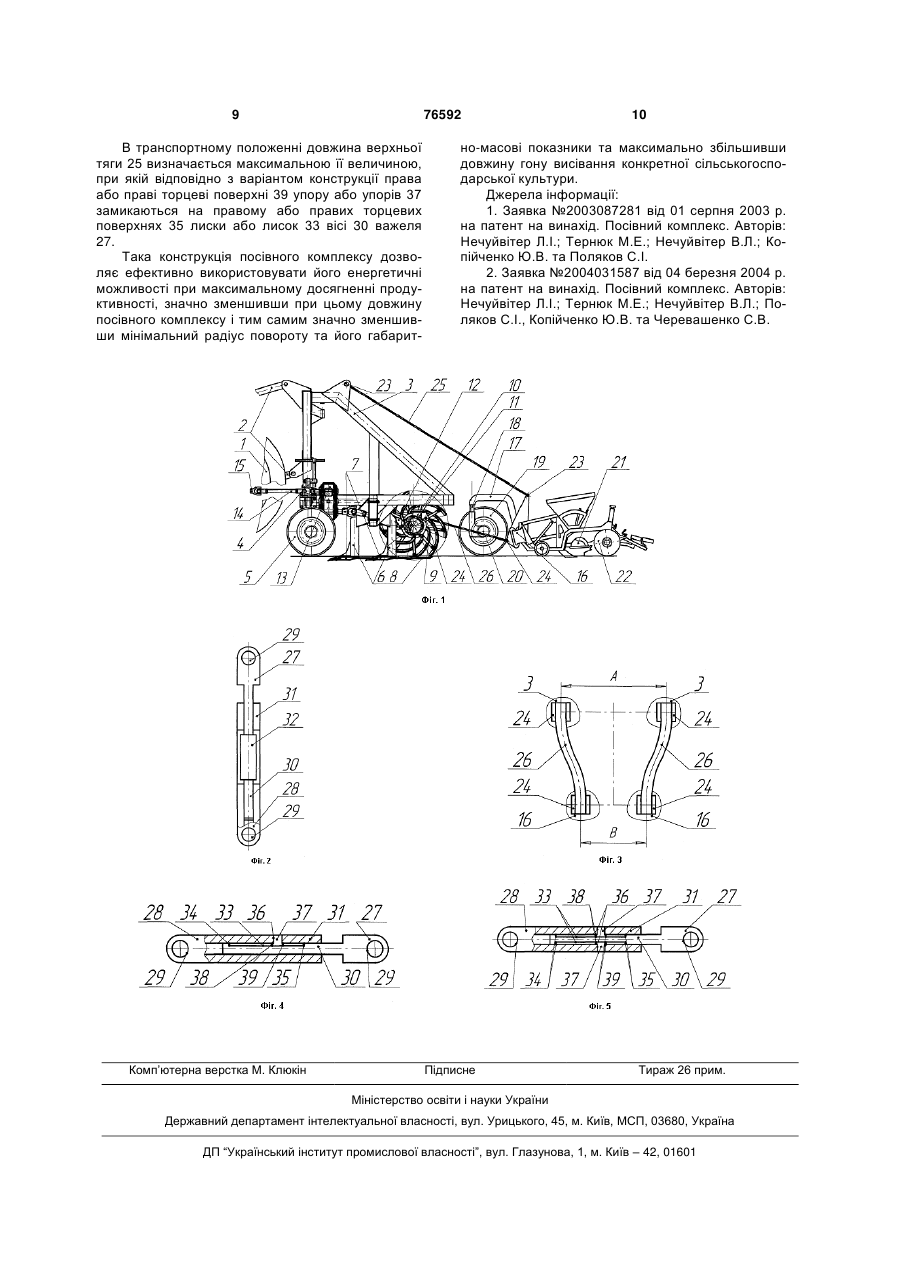
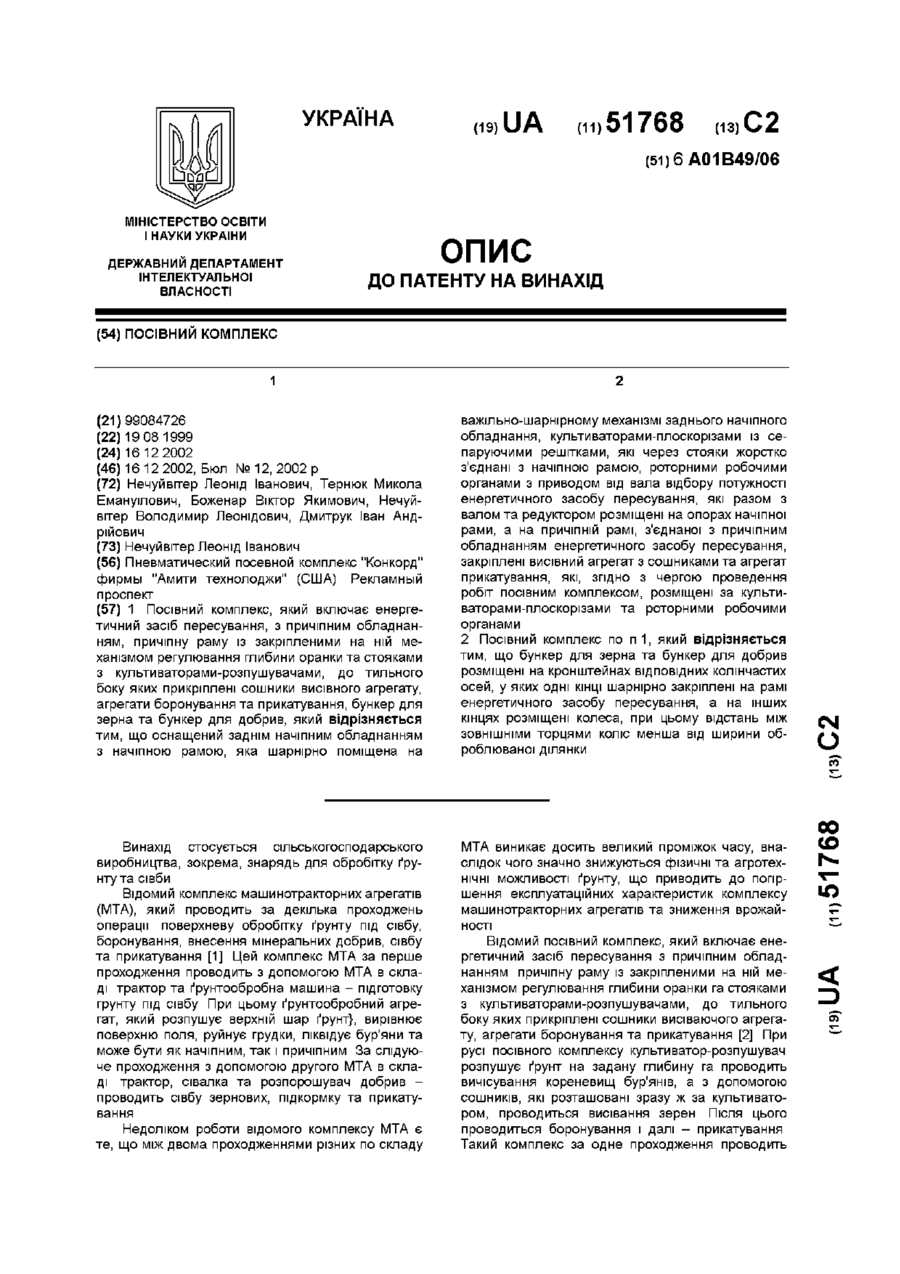
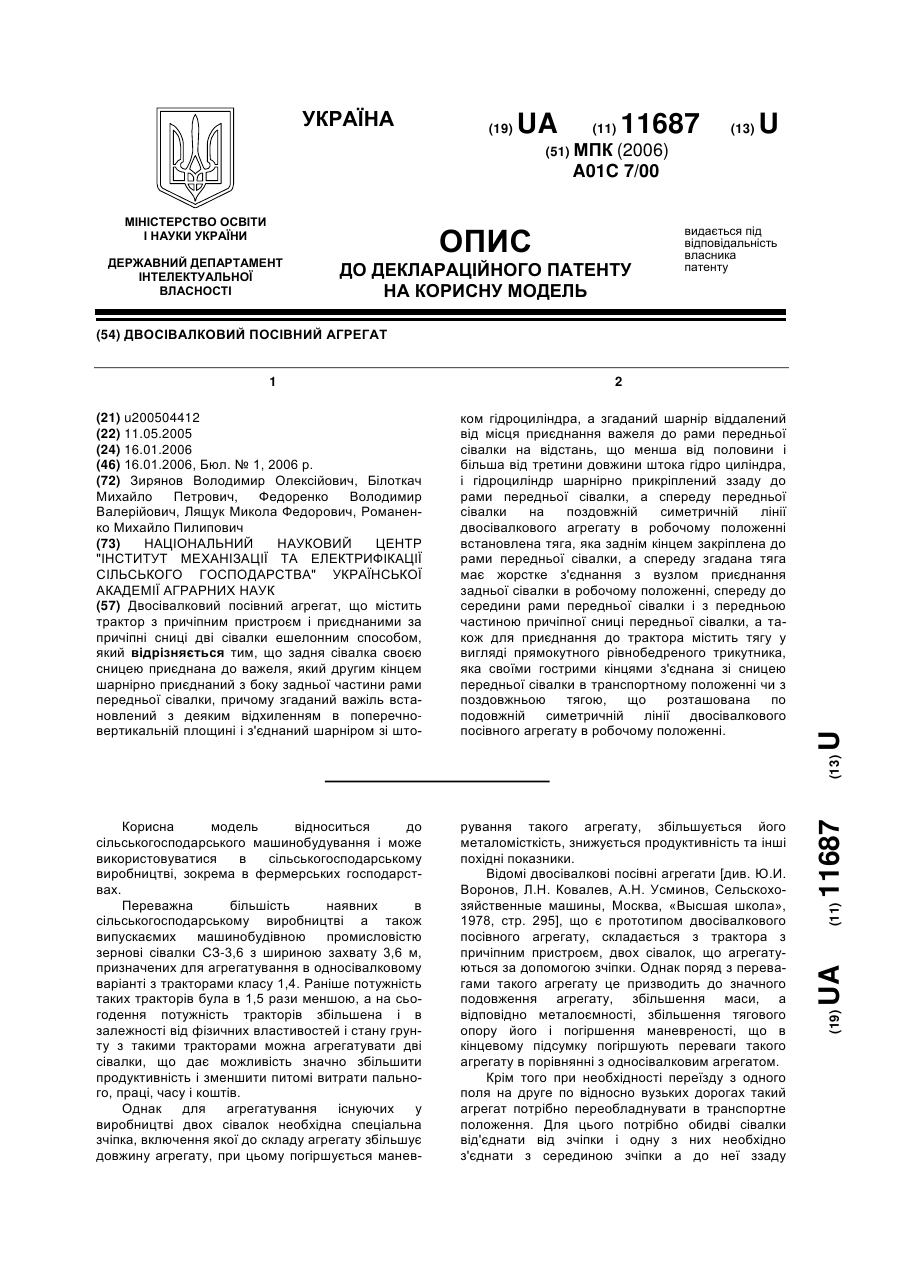
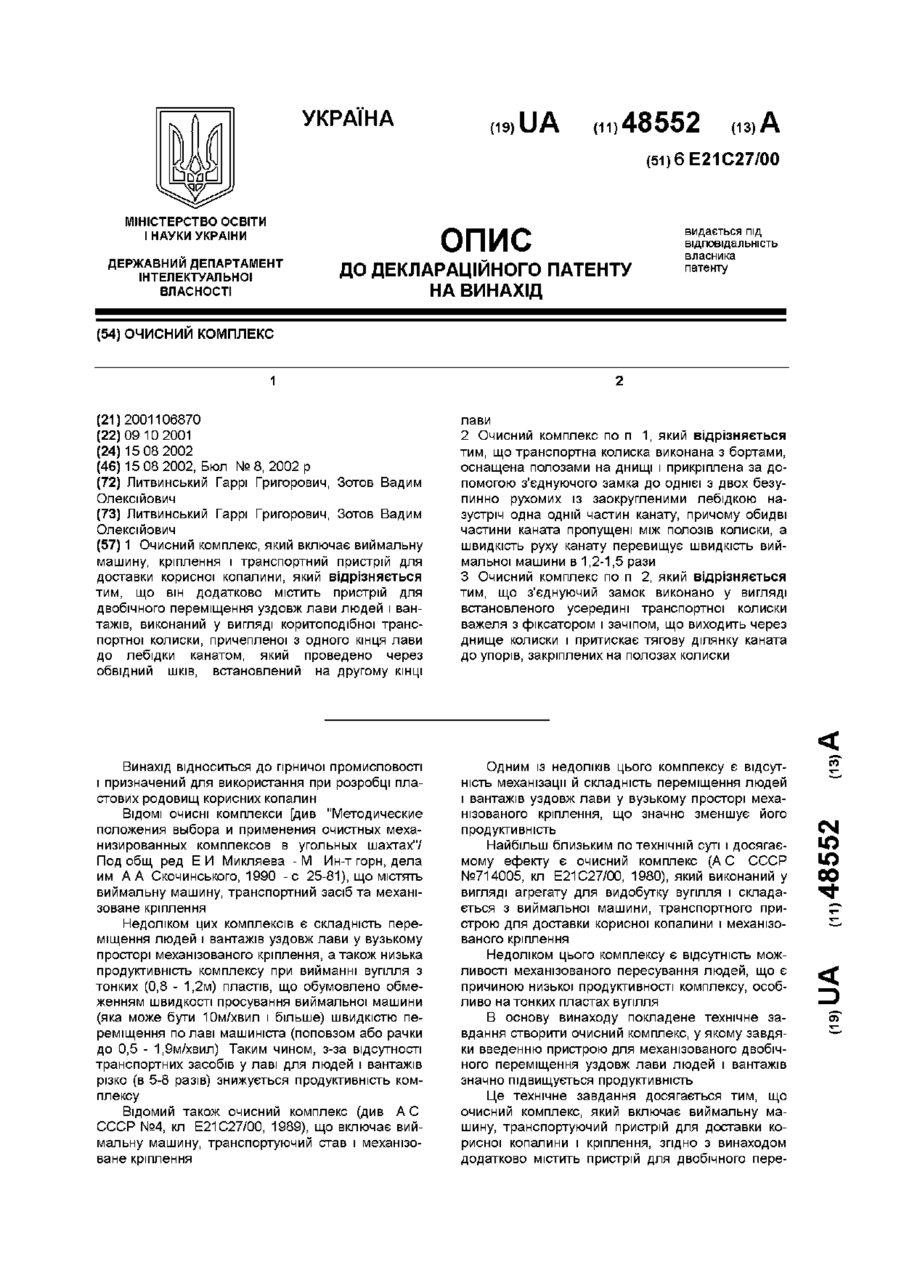
1. Посівний комплекс, який містить енергетичний засіб для пересування із заднім начіпним обладнанням та валом відбору потужності, начіпну раму із закріпленими на ній стояками з культиваторами-плоскорізами, роторним робочим органом з приводом від вала відбору потужності енергетичного засобу для пересування та механізмами регулювання глибини обробки ґрунту, поперечну балку з висівними агрегатами, яка виконана хвилеподібної форми, осі початку і кінця якої паралельні, агрегатами прикочування та опорними пневматичними колесами зі зміщеними осями обертання відносно вертикальних осей коливання кронштейнів їх кріплення, який відрізняється тим, що на тильній частині начіпної рами та поперечній балці встановлено по одному верхньому та по два нижніх кронштейни шарнірів, відповідні однойменні кронштейни яких з'єднані між собою однією верхньою та двома нижніми тягами, при цьому опорні пневматичні колеса зі зміщеними осями їх обертання відносно вертикальних осей коливання кронштейнів їх кріплення розміщені між начіпною рамою та поперечною балкою, а їх кронштейни вертикальних осей коливання жорстко закріплені на поперечній балці. 2. Посівний комплекс за п.1, який відрізняється тим, що верхня тяга виконана у вигляді двох важелів з вушками шарнірів на тих їх кінцях, що з'єднані з верхніми кронштейнами шарнірів тильної частини начіпної рами та поперечної балки, а інші кінці цих двох важелів, які взаємодіють між собою, завершені відповідно віссю на одному з двох важелів та втулкою на іншому важелі, і ці кінці із вту 2 (19) 1 3 76592 4 одного з важелів верхньої тяги, а в робочому положенні висівних агрегатів ліві торцеві поверхні упорів контактують з лівими торцевими поверхнями лисок осі важеля верхньої тяги. Винахід стосується сільськогосподарського виробництва, зокрема, знарядь для обробки грунту для сівби. Відомий посівний комплекс, який включає енергетичний засіб для пересування із заднім начіпним обладнанням та валом відбору потужності, начіпну раму із закріпленими на ній стояками з культиваторами-плоскорізами, роторним робочим органом з приводом від валу відбору потужності енергетичного засобу для пересування, механізмами регулювання глибини обробки ґрунту та висівними агрегатами з агрегатами прикочування, а між причіпним обладнанням енергетичного засобу для пересування та висівними агрегатами з агрегатами прикочування розміщено двохшарнірний з'єднувач з поперечно-горизонтальним та поперечно вертикальним шарнірами на своїх кінцях [1]. Недоліки цього посівного комплексу пов'язані з необхідністю при проведенні розвороту забезпечувати на полі раціональну величину смуги розвороту із-за наявності в конструкції причіпної частини посівного комплексу та його двохшарнірного з'єднувача з поперечно-горизонтальним та поперечно вертикальним шарнірами на своїх кінцях, що негативно позначується на габаритно-масових показниках, на часі проведення розвороту, на часі переведення посівного комплексу із транспортного положення в робоче чи навпаки та на величині енергетичних витрат, а в цілому - на зниженні продуктивності та надійності посівного комплексу. Найбільш близьким по технічній суті є посівний комплекс, який включає енергетичний засіб для пересування із заднім начіпним обладнанням та валом відбору потужності, начіпну раму із закріпленими на ній стояками з культиваторамиплоскорізами, роторним робочим органом з приводом від валу відбору потужності енергетичного засобу для пересування та механізмами регулювання глибини обробки грунту, спеціального профілю поперечну балку з висівними агрегатами, яка виконана хвилеподібної форми, вісі початку і кінця якої паралельні агрегатами прикочування та опорними пневматичними колесами зі зміщеними осями обертання відносно вертикальних осей коливання кронштейнів їх кріплення, які розміщені позаду спеціального профілю поперечної балки. Такий посівний комплекс значно зменшує не тільки величину смуги розвороту, але й позитивно позначується на габаритно-масових показниках [2]. До недоліків цього посівного комплексу слід віднести низьку продуктивність та надійність із-за складності конструктивного вирішення з'єднувача спеціального профілю поперечної балки з висівними агрегатами, агрегатами прикочування та опорними пневматичними колесами зі зміщеними осями обертання відносно вертикальних осей коливання кронштейнів їх кріплення з начіпною рамою та застосування гідравлічної системи поло ження цієї спеціального профілю поперечної балки, що додатково призводить до витрат часу на приведення посівного комплексу в необхідне положення: транспортне чи робоче. В основу винаходу поставлена задача підвищення продуктивності та надійності посівного комплексу за рахунок спрощення конструкції з'єднувача з начіпною рамою спеціального профілю поперечної балки та вилучення елементів гідравлічної системи з гідроциліндром положення спеціального профілю поперечної балки, що додатково призводить до зниження витрат часу на приведення посівного комплексу в необхідне положення: транспортне чи робоче. Поставлена задача вирішується тим, що в посівному комплексі на тильній частині начіпної рами та на спеціального профілю поперечній балці установлено по одному верхньому та по два нижніх кронштейна шарнірів, відповідні однойменні кронштейни яких з'єднані між собою однією верхньою та двома нижніми тягами, при цьому опорні пневматичні колеса зі зміщеними осями їх обертання відносно вертикальних осей коливання кронштейнів їх кріплення розміщені між начіпною рамою та спеціального профілю поперечною балкою, а їх кронштейни вертикальних осей коливання жорстко закріплені на спеціального профілю поперечній балці; що верхня тяга виконана у вигляді двох важелів з провушинами шарнірів на тих їх кінцях, що з'єднані з верхніми кронштейнами шарнірів тильної частини начіпної рами та спеціального профілю поперечної балки, а інші кінці цих двох важелів, які взаємодіють між собою, завершені відповідно віссю на одному з двох важелів та втулкою на іншому важелі і ці кінці зі втулкою та віссю є складовими повздовжнього шарніру, в який введено механізм обмеження осьового переміщення вісі кінця одного важеля верхньої тяги відносно втулки кінця іншого важеля цієї тяги в обидва боки, при цьому величина вільного осьового переміщення вісі відносно втулки, яке регулюється механізмом обмеження їх відносного осьового переміщення, відповідає необхідній величині кута затримки відхилення висівних агрегатів при їх переведені з робочого положення висівних агрегатів в транспортний; що довжина верхньої тяги більша довжини рівних між собою нижніх тяг, при цьому відстань між кронштейнами шарнірів нижніх тяг на тильній частині начіпної рами більша від такої ж відстані між кронштейнами нижніх тяг на спеціального профілю поперечній балці; що механізм обмеження осьового переміщення вісі кінця одного важеля верхньої тяги відносно втулки кінця іншого важеля цієї тяги в обидва боки виконано у вигляді потрібної довжини та з опорними торцевими поверхнями на кінцях лиски на вісі кінця одного важеля верхньої тяги, та отвору, в якому розміщено упор, на втулці кінця іншого важеля верхньої тяги, при 5 цьому в транспортному положенні висівних агрегатів права торцева поверхня упору контактує з правою торцевою поверхнею лиски вісі важеля верхньої тяги, а в робочому положенні висівних агрегатів ліва торцева поверхня упору контактує з лівою торцевою поверхнею лиски вісі важеля верхньої тяги; що механізм обмеження осьового переміщення вісі кінця одного важеля верхньої тяги відносно втулки кінця іншого важеля цієї тяги в обидва боки виконано у вигляді двох, симетричних відносно повздовжньої площини симетрії верхньої тяги, необхідної довжини та з опорними торцевими поверхнями на кінцях лисок на вісі кінця одного важеля верхньої тяги, та двох, симетричних відносно повздовжньої площини симетрії верхньої тяги, отворів, в кожному з яких розміщено по упору, втулки кінця іншого важеля верхньої тяги, при цьому в транспортному положенні висівних агрегатів праві торцеві поверхні обох упорів контактують з правими торцевими поверхнями лисок вісі одного з важелів верхньої тяги, а в робочому положенні висівних агрегатів ліві торцеві поверхні упорів контактують з лівими торцевими поверхнями лисок вісі важеля верхньої тяги. Здійснення посівного комплексу тільки з використанням однієї верхньої та двох нижніх тяг при кінематичному узгодженні процесу приведення спеціального профілю поперечної балки з висівними агрегатами та агрегатами прикочування із робочого її положення в транспортне чи, навпаки, із транспортного її положення в робоче дозволяє не тільки спростити конструкцію та зменшити габаритно-масові показники посівного комплексу, але й більш повно використовувати оброблену культиваторами-плоскорізами та роторним робочим органом ділянку грунту в кінці кожного гону та створити умови для розширення функціональних можливостей за рахунок швидкого його переналагодження під висівання різних сільськогосподарських культур. Заявнику невідомі приклади виготовлення посівного комплексу з такими конструктивними та технологічними рішеннями. Створення такого посівного комплексу стало можливим завдяки використанню в основі винаходу фізичних явищ, які виявили автори. Винахід ілюструється кресленнями, на яких відображено: Фіг.1 - кінематична схема посівного комплексу (вид збоку); Фіг.2 - схема двохважільної верхньої тяги з механізмом обмеження осьового переміщення; Фіг.3 - схема розміщення нижніх тяг та їх кронштейнів на тильній частині начіпної рами та спеціального профілю поперечній балці; Фіг.4 - схема двохважільної верхньої тяги з лискою на вісі кінця одного з важелів та з отвором на втулці іншого важеля; Фіг.5 - схема двохважільної верхньої тяги з двома лисками на вісі кінця одного з важелів та з двома отворами на втулці іншого важеля. Посівний комплекс складається із енергетичного засобу для пересування 1, заднього начіпного обладнання з важільно-шарнірним механізмом 2 та начіпної рами 3, яка установлена на важільно 76592 6 шарнірному механізмі 2 заднього начіпного обладнання. На начіпній рамі 3 закріплені механізми 4 регулювання глибини обробки грунту з колесами 5 та стояки 6 з культиваторами-плоскорізами 7 та сепаруючими решітками 8. Роторний робочий орган 9 установлений на начіпній рамі 3 в опорах 10. Всередині роторного робочого органу 9 установлено два ведучі вали 11, кожний з яких розміщений між конічним редуктором 12, закріпленим на начіпній рамі 3 разом з коробкою передач 13, та відповідними опорами 10. Роторний робочий орган 9 через ведучі вали 11, конічний редуктор 12 з коробкою передач 13 та карданну передачу 14 з'єднані з валом 15 відбору потужності енергетичного засобу для пересування 1. По напряму руху посівного комплексу за начіпною рамою 3 установлено спеціального профілю поперечну балку 16, до якої закріплено два кронштейни 17 вертикальних осей коливання 18 опорних пневматичних коліс 19 зі зміщеними осями їх обертання 20 відносно вертикальних осей коливання 18. Опорні пневматичні колеса 19 розміщені між начіпною рамою 3 та спеціального профілю поперечною балкою 16. До спеціального профілю поперечної балки 16 закріплено висівні агрегати 21 з агрегатами прикочування 22. На тильній частині начіпної рами 3 та на спеціального профілю поперечній балці 16 установлено по одному верхньому 23 та по два нижніх 24 кронштейна шарнірів, відповідні однойменні кронштейни яких з'єднані між собою однією верхньою 25 та двома нижніми 26 тягами. Для кінематичного узгодження роботи культиваторів-плоскорізів 7 та висівних агрегатів 21, яке необхідне перед проведенням розвороту, верхня тяга 25 виконана у вигляді двох важелів 27 та 28 з провушинами 29 шарнірів на тих їх кінцях, що з'єднані з верхніми кронштейнами 23 шарнірів відповідно тильної частини начіпної рами 3 та спеціального профілю поперечної балки 16. Інші кінці цих двох важелів 27 та 28, які взаємодіють між собою, завершені відповідно віссю 30 на одному з двох важелів 27 та втулкою 31 на іншому важелі 28. Кінці зі втулкою 31 та віссю 30 цих двох важелів 27 та 28 є складовими повздовжнього шарніру, в який введено механізм обмеження осьового переміщення 32 вісі 30 кінця важеля 27 верхньої тяги відносно втулки 31 кінця важеля 28 в обидва боки. При цьому величина вільного осьового переміщення вісі 30 відносно втулки 31, яке регулюється механізмом обмеження їх відносного осьового переміщення 32, відповідає необхідній величині кута затримки відхилення висівних агрегатів 21 при переведені їх з робочого положення в транспортний. Для стабілізації положення спеціального профілю поперечної балки 16 при проведенні польових робіт відстань А між кронштейнами 24 шарнірів нижніх тяг 26 на тильній частині начіпної рами 3 більша від такої ж відстані В між кронштейнами 24 шарнірів нижніх тяг 26 на спеціального профілю поперечній балці 16. Кінематичне узгодження роботи культиваторів-плоскорізів 7 та висівних агрегатів 21 потребує також забезпечення більшості 7 довжини верхньої тяги 25 перед довжиною рівних між собою нижніх тяг 26. Конструктивно механізм обмеження осьового переміщення 32 вісі 30 кінця важеля 27 верхньої тяги 25 відносно втулки 31 кінця важеля 28 в обидва боки виконано у вигляді потрібної довжини лиски 33 на вісі 30 кінця важеля 27 верхньої тяги 25 з опорними торцевими поверхнями лівою 34 та правою 35 на її кінцях, та отвору 36 у втулці 31 кінця важеля 28 верхньої тяги 25. В отворі 36 розміщено упор 37 з лівою 38 та правою 39 торцевими поверхнями. При цьому в транспортному положенні висівних агрегатів 21 права торцева поверхня 39 упору 37 контактує з правою торцевою поверхнею 35 лиски 33 вісі 30 важеля 27 верхньої тяги 25. В робочому положенні висівних агрегатів 21 ліва торцева поверхня 38 упору 37 контактує з лівою торцевою поверхнею 34 лиски 33 вісі 30 важеля 27 верхньої тяги 25. Для зменшення навантаження елементів механізму обмеження осьового переміщення 32 на вісі 30 кінця важеля 27 верхньої тяги 25 симетрично її повздовжньої площини симетрії виконано дві лиски 33 необхідної довжини та з опорними торцевими поверхнями лівими 34 та правими 35 на їх кінцях, а у втулці 31 кінця важеля 28 верхньої тяги 25 симетрично її повздовжньої площини симетрії виконано два отвори 36. В обох отворах 36 розміщено по упору 37 з лівими 38 та правими 39 торцевими поверхнями. При цьому в транспортному положенні висівних агрегатів 21 праві торцеві поверхні 39 упорів 37 контактують з правими торцевими поверхнями 35 лисок 33 вісі 30 важеля 27 верхньої тяги 25. В робочому положенні висівних агрегатів 21 ліві торцеві поверхні 38 упорів 37 контактують з лівими торцевими поверхнями 34 лисок 33 вісі 30 важеля 27 верхньої тяги 25. Посівний комплекс має два положення: робоче та транспортне. З транспортного положення в робоче посівний комплекс переводиться за допомогою важільношарнірного механізму 2 заднього начіпного обладнання енергетичного засобу для пересування 1, який начіпну раму 3 опускає на ґрунт до зіткнення культиваторів-плоскорізів 7 з ґрунтом. Включається привід роторного робочого органу 9, надаючи йому обертального руху, і після цього посівний комплекс може рухатись. При приведенні в рух посівного комплексу культиватори-плоскорізи 7 заглиблюються в ґрунт на відрегульовану механізмами 4 регулювання глибини обробки ґрунту, необхідну згідно з агротехнічними вимогами на передпосівну обробку ґрунту для конкретної сільськогосподарської культури. Орний шар ґрунту при переміщенні до сепаруючих решіток 8 попередньо кришиться та здрібнюється, а уже на них роторний робочий орган 9 остаточно кришить та здрібнює підрізаний шар ґрунту, перетрушує його, а на виході переміщує великі грудки та рослинні залишки наверх, тим самим проводячи суцільну обробку ґрунту без ніяких проміжків. Здрібнені грудки просипаються через прутки сепаруючих решіток 8. Таким чином, підрізаний шар ґрунту дуже добре кришиться, ґрунт розподіляється по фракціям, і все це здійснюється без утво 76592 8 рення ґрунтового ядра, тобто без утворення перед роторним робочим органом 9 валків ґрунту. Додержання черговості виконання агротехнічних робіт посівним комплексом дозволяє проводити наступні сільськогосподарські технологічні операції після повного циклу підготовки ґрунту. Одночасно з опусканням начіпної рами 3 та зміною в просторі положення кронштейнів 23 та 24 на її тильній частині змінюється і положення верхньої 25.та нижніх 26 тяг. Зменшення відстані від поверхні ґрунту до осей кронштейнів 23 та 24 тильної частини начіпної рами 3 при незмінній відстані від поверхні ґрунту до вісі обертання 20 опорних пневматичних коліс 19 призводить до провертання навколо неї кронштейнів 17 вертикальних осей коливання 18 разом із спеціального профілю поперечною балкою 16. При цьому провертаються і висівні агрегати 21 з агрегатами прикочування 22 та займають своє робоче положення в момент заглиблення культиваторів-плоскорізів 7 на необхідну згідно агротехнічних вимог глибину для конкретної сільськогосподарської культури. Висівання зерен здійснюється висівними агрегатами 21, сошники яких опускаються в ґрунт на відрегульовану глибину. Після висівання зерен проводиться проміжкове ущільнення ґрунту агрегатами прикочування 22. При переведенні посівного комплексу в транспортне положення важільно-шарнірний механізм 2 заднього начіпного обладнання енергетичного засобу для пересування 1 піднімає начіпну раму 3 і цим самим виглиблює з ґрунту культиваториплоскорізи 7. Кронштейни 23 та 24 піднімаються вверх і при цьому за допомогою верхньої 25 та двох нижніх 26 тяг провертають навколо вісі обертання 20 пневматичних коліс 19 кронштейни 17 їх вертикальних осей коливання 18 разом із спеціального профілю поперечною балкою 16, що призводить до провертання і висівних агрегатів 21 з агрегатами прикочування 22 до їх повного виглиблення з ґрунту. Цим самим висівні агрегати 21 з агрегатами прикочування 22 приводяться в транспортне положення. Виглиблення культиваторів-плоскорізів 7 проводиться на прямолінійній ділянці поля. Тому для повного використання обробленої культиваторами-плоскорізами 7 та роторним робочим органом 9 ділянки поля для сівби необхідне деяке запізнення з виглибленням висівних агрегатів 21 по відношенню до виглиблення культиваторів-плоскорізів 7 та робочого органу 9. Це досягається за рахунок вільного осьового переміщення вісі 30 кінця важеля 27 відносно втулки 31 кінця важеля 28, яке регулюється механізмом 32 обмеження їх відносного переміщення. Величина такого осьового переміщення відповідає величині кута затримки провертання висівних агрегатів 21 навколо вісі обертання 20 опорних пневматичних коліс 19. При цьому в робочому положенні довжина верхньої тяги 25 визначається мінімальною її величиною, при якій відповідно з варіантом конструкції ліва або ліві торцеві поверхні 38 упору або упорів 37 замикаються на лівій або лівих торцевих поверхнях 34 лиски або лисок 33 вісі 30 важеля 27. 9 76592 В транспортному положенні довжина верхньої тяги 25 визначається максимальною її величиною, при якій відповідно з варіантом конструкції права або праві торцеві поверхні 39 упору або упорів 37 замикаються на правому або правих торцевих поверхнях 35 лиски або лисок 33 вісі 30 важеля 27. Така конструкція посівного комплексу дозволяє ефективно використовувати його енергетичні можливості при максимальному досягненні продуктивності, значно зменшивши при цьому довжину посівного комплексу і тим самим значно зменшивши мінімальний радіус повороту та його габарит Комп’ютерна верстка М. Клюкін 10 но-масові показники та максимально збільшивши довжину гону висівання конкретної сільськогосподарської культури. Джерела інформації: 1. Заявка №2003087281 від 01 серпня 2003 р. на патент на винахід. Посівний комплекс. Авторів: Нечуйвітер Л.І.; Тернюк М.Е.; Нечуйвітер В.Л.; Копійченко Ю.В. та Поляков C.I. 2. Заявка №2004031587 від 04 березня 2004 р. на патент на винахід. Посівний комплекс. Авторів: Нечуйвітер Л.І.; Тернюк М.Е.; Нечуйвітер В.Л.; Поляков C.I., Копійченко Ю.В. та Черевашенко С.В. Підписне Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюSeeding complex
Автори англійськоюNechuiviter Volodymyr Leonidovych, Nechuiviter Leonid Ivanovych
Назва патенту російськоюПосевной комплекс
Автори російськоюНечуйвитер Владимир Леонидович, Нечуйвитер Леонид Иванович
МПК / Мітки
МПК: A01B 49/04, A01B 49/06
Код посилання
<a href="https://ua.patents.su/5-76592-posivnijj-kompleks.html" target="_blank" rel="follow" title="База патентів України">Посівний комплекс</a>
Посівний комплекс
Номер патенту: 51768
Опубліковано: 16.12.2002
Автори: Тернюк Микола Емануїлович, Боженар Віктор Якимович, Нечуйвітер Володимир Леонідович, Дмитрук Іван Андрійович, Нечуйвітер Леонід Іванович
МПК: A01B 49/06
Формула / Реферат:
1. Посівний комплекс, який включає енергетичний засіб пересування, з причіпним обладнанням, причіпну раму із закріпленими на ній механізмом регулювання глибини оранки та стояками з культиваторами-розпушувачами, до тильного боку яких прикріплені сошники висівного агрегату, агрегати боронування та прикатування, бункер для зерна та бункер для добрив, який відрізняється тим, що оснащений заднім начіпним обладнанням з начіпною рамою, яка шарнірно...
Двосівалковий посівний агрегат
Номер патенту: 11687
Опубліковано: 16.01.2006
Автори: Федоренко Володимир Валерійович, Романенко Михайло Пилипович, Лящук Микола Федорович, Білоткач Михайло Петрович, Зирянов Володимир Олексійович
МПК: A01C 7/00
Мітки: двосівалковий, посівний, агрегат
Формула / Реферат:
Двосівалковий посівний агрегат, що містить трактор з причіпним пристроєм і приєднаними за причіпні сниці дві сівалки ешелонним способом, який відрізняється тим, що задня сівалка своєю сницею приєднана до важеля, який другим кінцем шарнірно приєднаний з боку задньої частини рами передньої сівалки, причому згаданий важіль встановлений з деяким відхиленням в поперечно-вертикальній площині і з'єднаний шарніром зі штоком гідроциліндра, а згаданий...
Комбінований грунтообробний посівний агрегат

Номер патенту: 15574
Опубліковано: 17.07.2006
Автори: Білоткач Михайло Петрович, Романенко Михайло Пилипович, Шквира Андрій Степанович, Бойченко Сергій Федорович, Зирянов Володимир Олексійович
МПК: A01B 49/00
Мітки: агрегат, посівний, комбінований, грунтообробний
Формула / Реферат:
Комбінований ґрунтообробний посівний агрегат, який містить посівну та ґрунтообробну частину, яка має фрезерні робочі органи з вертикальною віссю обертання і вирівнювальний ущільнювальний коток, приєднану до начіпного пристрою трактора, а посівна частина за допомогою окремої паралелограмної зчіпки з’єднана з ґрунтообробною частиною агрегата, зчіпка має подвійні верхні та нижні поздовжні тяги, а також - перемички для з’єднання їх між собою, а...
Очисний комплекс
Номер патенту: 48552
Опубліковано: 15.08.2002
Автори: Литвинський Гаррі Григорович, Зотов Вадим Олексійович
МПК: E21C 27/00
Формула / Реферат:
1. Очисний комплекс, який включає виймальну машину, кріплення і транспортний пристрій для доставки корисної копалини, який відрізняється тим, що він додатково містить пристрій для двобічного переміщення уздовж лави людей і вантажів, виконаний у вигляді коритоподібної транспортної колиски, причепленої з одного кінця лави до лебідки канатом, який проведено через обвідний шків, встановлений на другому кінці лави.2. Очисний комплекс по п....
Цистерна для транспортування рідини
Номер патенту: 806
Опубліковано: 16.04.2001
Автор: Коваленко Валентин Петрович
МПК: B65D 88/12
Мітки: цистерна, рідини, транспортування
Формула / Реферат:
1. Цистерна для транспортування рідини, яка містить корпус із горловиною, зливо-наливний пристрій, поплавок для визначення рівня рідини у цистерні і ємкість для компенсації температурних розширень рідини, що розміщена в порожнині цистерни і з’єднується з нею через канал і переливні труби, яка відрізняється тим, що в каналі виконано сідло, яке взаємодіє із клапаном, що жорстко закріплений на вертикальному штоці, при цьому, шток із...
Наступний патент: Спосіб очистки коренеплодів та пристрій для його здійснення
Випадковий патент: Фазовий модуль