Чутливий елемент датчика коливань та спосіб реєстрації коливань поверхні
Формула / Реферат
1. Чутливий елемент датчика коливань для роботи у рідинному середовищі, який відрізняється тим, що чутливий елемент виконаний у вигляді заповненого рідиною трубчастого корпусу, який має вхідний та вихідний отвори, причому вхідний отвір трубчастого корпусу герметично закритий пружною мембраною, через яку коливання поверхні надходять до чутливого елемента, вихідний отвір виконаний з можливістю розташування вимірювального перетворювача датчика коливань, а до зовнішньої сторони трубчастого корпусу прикріплена ємність з газом достатнього об'єму для надання чутливому елементу позитивної плавучості.
2. Чутливий елемент за п. 1, який відрізняється тим, що фігура поперечного перерізу трубчастого корпусу вздовж всієї його довжини у будь-якому місці має довільну форму.
3. Чутливий елемент за п. 1, який відрізняється тим, що площа фігури поперечного перерізу трубчастого корпусу вздовж всієї його довжини є однаковою.
4. Чутливий елемент за п. 1, який відрізняється тим, що площа фігури поперечного перерізу трубчастого корпусу вздовж всієї його довжини у напрямку від вхідного отвору до вихідного збільшується.
5. Чутливий елемент за п. 1, який відрізняється тим, що внутрішня поверхня трубчастого корпусу виконана полірованою або має покриття, що забезпечує зменшення турбулентних явищ у пристіночному шарі наповнюючої трубчастий корпус рідини.
6. Чутливий елемент за п. 1, який відрізняється тим, зовнішня поверхня трубчастого корпусу виконана полірованою або має покриття, що забезпечує зменшення гідродинамічного опору коливанням чутливого елемента при розміщенні його у рідині.
7. Чутливий елемент за п. 1, який відрізняється тим, що трубчастий корпус має форму, що забезпечує зменшення гідродинамічного опору коливанням чутливого елемента при розміщенні його у рідині.
8. Чутливий елемент за п. 1, який відрізняється тим, що трубчастий корпус має форму спіралі.
9. Чутливий елемент за одним з пп. 1-8, який відрізняється тим, що він обладнаний засобом для автоматичної регуляції або стабілізації глибини занурення чутливого елемента.
10. Спосіб реєстрації коливань поверхні, який відрізняється тим, що у рідині над поверхнею, яка коливається, розташовують чутливий елемент датчика коливань, виконаний за ознаками одного з пп. 1-9, регулюють глибину занурення чутливого елемента шляхом зміни об’єму газу у ємності, після чого здійснюють реєстрацію коливань поверхні.
11. Спосіб за п. 10, який відрізняється тим, що глибину занурення чутливого елемента регулюють шляхом додавання рідини у ємність з газом або зміною величини додатково приєднаного до корпусу чутливого елемента вантажу.
Текст
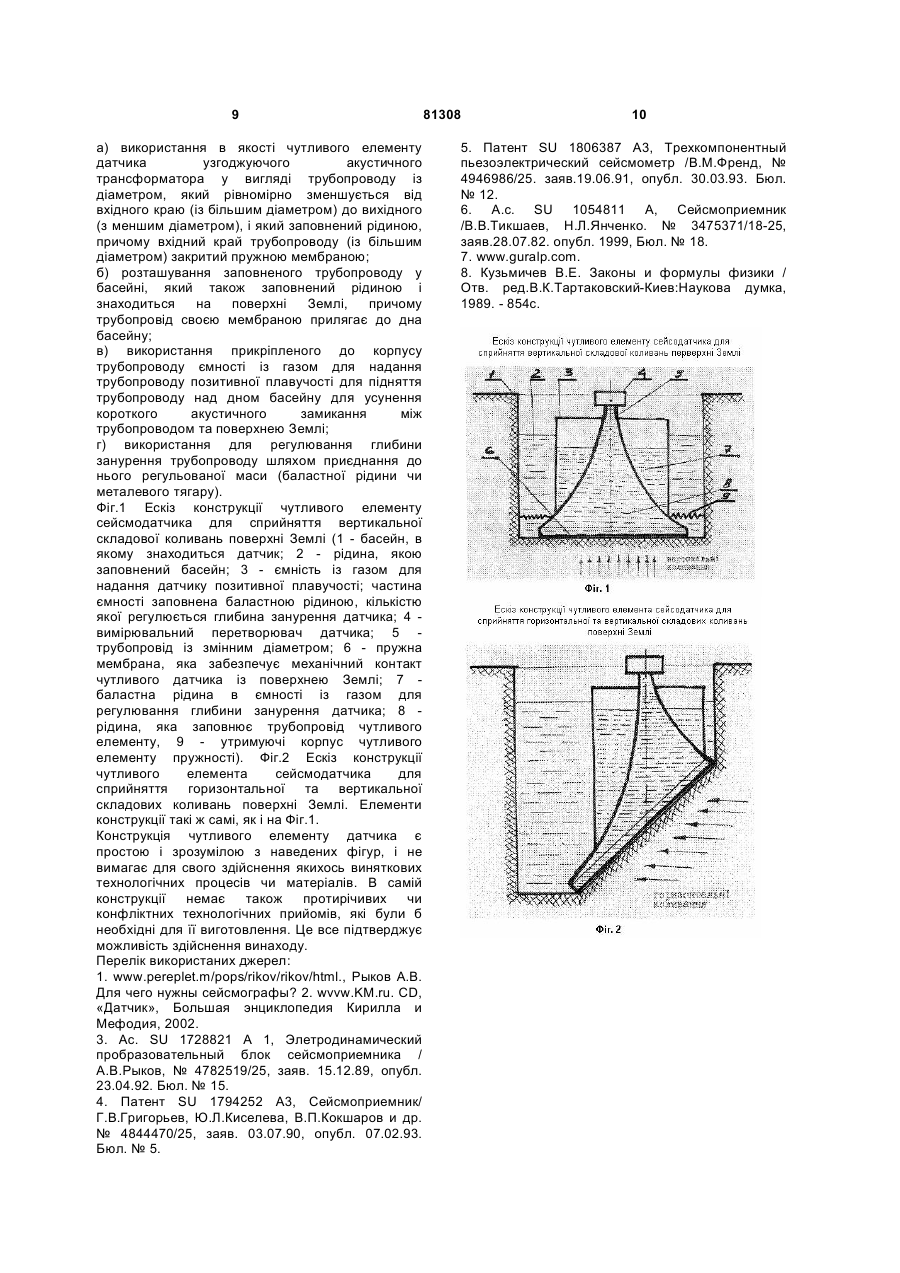
1. Чутливий елемент датчика коливань для роботи у рідинному середовищі, який відрізняється тим, що чутливий елемент виконаний у вигляді заповненого рідиною трубчастого корпусу, який має вхідний та вихідний отвори, причому вхідний отвір трубчастого корпусу герметично закритий пружною мембраною, через яку коливання поверхні надходять до чутливого елемента, вихідний отвір виконаний з можливістю розташування вимірювального перетворювача датчика коливань, а до зовнішньої сторони трубчастого корпусу прикріплена ємність з газом достатнього об'єму для надання чутливому елементу позитивної плавучості. 2. Чутливий елемент за п. 1, який відрізняється тим, що фігура поперечного перерізу трубчастого корпусу вздовж всієї його довжини у будь-якому місці має довільну форму. 3. Чутливий елемент за п. 1, який відрізняється тим, що площа фігури поперечного перерізу трубчастого корпусу вздовж всієї його довжини є однаковою. C2 2 (19) 1 3 використаний в геофізиці, наприклад, для реєстрації, визначення параметрів та прогнозування землетрусів, та в охоронній техніці. Коливання поверхні Землі, як і будь-які коливання, характеризуються частотою (чи спектром частот) та інтенсивністю (чи потужністю) Частотний діапазон сейсмічних коливань поверхні Землі характеризується наднизькими (інфранизькими) частотами - від білянульових до 10Гц [1]. Площа коливань поверхні Землі (наприклад, при землетрусі) та їхня потужність завжди надзвичайно великі, бо коливаються величезні маси поверхні, причому коливання поверхні можуть бути вертикальними та горизонтальними. Реєстрація коливань поверхні здійснюється за допомогою сейсмологічної апаратури (сейсмоприймачів), причому ця апаратура в якості вхідного сигналу використовує сигнали з датчиків в електричній формі. Це означає, що датчик повинен сприймати механічні коливання поверхні Землі і перетворити їх в електричний сигнал. Тобто структурно датчик складається з двох частин, одна з яких безпосередньо сприймає механічні коливання поверхні Землі і називається "чутливий елемент" датчика, а друга - перетворює механічні коливання, зняті з першої частини, в електричний сигнал і називається "вимірювальний перетворювач" датчика [2]. Винахід стосується першої частини датчика, тобто тієї, яка сприймає механічні коливання поверхні і називається "чутливий елемент" датчика. Чутливий елемент не перетворює коливання поверхні в якісь інші за формою коливання, а лише робить їх зручними для сприйняття вимірювальним перетворювачем датчика. Реєстрація коливань поверхні Землі є досить важким завданням. Трудність такої реєстрації полягає в тому, що самі сейсмодатчики знаходяться на поверхні Землі, яка коливається; при цьому сейсмодатчик коливається разом із поверхнею у фазі, що не дає змоги мати відносну (чи механічно незалежну) "точку відрахунку", по відношенню до якої можна виміряти (чи визначити) амплітуду та частоту коливань поверхні Землі. Ідеальний варіант вимірювання (чи виділення) коливань поверхні Землі був би в тому випадку, якби сейсмодатчик був механічно відокремленій від поверхні Землі (наприклад, знаходився на Місяці), але зараз це є практично неможливим. По суті, з точки зору механіки, знаходження сейсмодатчика на тій же поверхні, яка коливається, утворює акустичне коротке замикання між "входом" і "виходом" сейсмодатчика, бо чутливий елемент датчика і його корпус коливаються у фазі. Будь-який датчик є механічною резонансною системою (бо, як правило, має в своєму складі масу і пружність), тому було б доцільно здійснювати реєстрацію коливань на резонансній частоті датчика, тому що при цьому зсув по фазі між коливаннями вхідного (чутливого) елементу і корпусом датчика становить 180°, що відповідає відсутності (або зменшенню) акустичного короткого замикання. Але в такому випадку реєстрація можлива лише у вузькому діапазоні частот (яка залежить від 81308 4 добротності сейсмодатчика як резонансного контуру), що не є прийнятним, бо реєстрація повинна проводитись у якнайширшому діапазоні частот. Тому реєстрація коливань проводиться і на частотах вище і нижче від резонансної (тобто на схилах амплітудно-частотної характеристики сейсмодатчика чи його чутливого елемента), а тому чим більше від резонансної частоти чутливого елементу датчика відрізняється частота коливань, що приймаються, тим менша чутливість датчика. Чутливість сейсмодатчика залежить від чутливості обох його частин - чутливого елементу та вимірювального перетворювача. Вимірювальні перетворювачі, як правило, є надзвичайно чутливими електронними пристроями, які можуть вимірювати корисний сигнал з амплітудою, яка дорівнює амплітуді броунівського руху у вхідних ланках перетворювача. І навпаки, чутливість чутливого елементу датчика з багатьох причин є низькою, тому загальна чутливість сейсмодатчика визначається (чи залежить) чутливістю його чутливого елементу. Аналогів окремих чутливих елементів сейсмодатчиків не виявлено, тобто пропонований чутливий елемент сейсмодатчика не має аналогів і є піонерним. В той же час, для кращого розуміння роботи пропонованого чутливого елемента розглянемо недоліки деяких існуючих сейсмодатчиків (враховуючи те, що до складу кожного сейсмодатчика обов"язково входить чутливий елемент датчика як його невід" ємна механічна частина). Такими сейсмодатчиками можуть бути, наприклад, "Элетродинамический преобразовательный блок сейсмоприемника» [3], «Сейсмоприемник» [4], «Трехкомпонентный пьезоэлектрический сейсмометр» [5], «Сейсмоприемник» [6], сейсмоприймачі фірми "Guralp" [7]. Всіх їх об'єднує те, що в якості чутливого елементу використовується механічний маятник, до складу якого входять інертна маса та пружність. При застосуванні маятника використовується незалежність частоти коливань маси маятника від точки (місця) закріплення підвісу (тобто від корпусу), яка, звичайно, жорстко прив'язана до коливальної поверхні Землі (корпус завжди знаходиться на поверхні Землі). При коливанні поверхні Землі чи корпусу маятника відбувається їхнє зміщення відносно маси маятника, що може реєструватись вимірювальним перетворювачем датчика, наприклад, електродинамічним, п'єзоелектричним, оптоелектричним чи ємнісним. 3. Загальними недоліками сейсмодатчиків (і їхніх чутливих елементів) є: а) мала чутливість із-за наявності короткого акустичного замикання між чутливим елементом сейсмодатчика та його корпусом, які коливаються синфазно з поверхнею Землі, що приводить до великих втрат корисного сигналу, внаслідок чого коефіцієнт передачі такого датчика (по амплітуді чи по потужності) завжди менше 1; причому чим більша різниця по частоті між коливанням поверхні та резонансною частотою чутливого елементу датчика (особливо в низькочастотний бік), тим 5 менший коефіцієнт передачі і менша чутливість датчика, б) відсутність узгодження акустичних імпедансів середовища поверхні Землі та вхідних деталей чутливих елементів датчиків (тобто відсутність узгоджуючого акустичного трансформатора), що приводить до втрат енергії корисного сигналу на розсіювання, внаслідок чого знижується амплітуда корисного сигналу, який передається датчику, що знижує його чутливість. в) зниження його чутливості із-за гістерезисних втрат енергії корисного сигналу в пружностях підвісу інертної маси маятника при її коливанні. Ці втрати є результатом постійного зміщення донизу (до поверхні Землі) інертної маси маятника під впливом тяжіння Землі, тобто теоретично - при відсутності земного тяжіння, при пружному підвісі інертної маси маятника ця маса повинна знаходитись у певній точці простору, але під дією власної ваги маси маятника реальна точка буде зміщена донизу від вищезгаданої теоретичної точки простору, що утворить ексцентриситет між обома точками, на подолання якого при коливанні маси маятника буде затрачена певна кількість корисного сигналу - гістерезисні втрати). Мета винаходу-створити такі спосіб та пристрій, які дали б можливість отримати чутливий елемент датчика, який би: а) був чутливим до вертикальної та горизонтальної складових коливань поверхні; б) мав якнайменшу величину акустичного короткого замикання; в) був акустичне узгодженим із середовищем поверхні, яка коливається; г) мав коефіцієнт передачі більше 1; д) мав рівномірну амплітудно-частотну передавальну характеристику. Завдання винаходу полягає в тому, щоб запропонувати спосіб побудови та конструкцію чутливого елементу сейсмодатчика, які б дозволяли узгодити акустичні імпеданси середовища поверхні Землі та вхідних деталей чутливого елементу, причому із коефіцієнтом передачі корисного сигналу по амплітуді більше 1, та суттєво зменшити величину акустичного короткого замикання між корпусом чутливого елемента та поверхнею в широкому діапазоні наднизьких та низьких частот при рівномірній амплітудно-частотній характеристиці коефіцієнта передачі. Конструкція чутливого елементу Вирішення поставленого завдання досягається тим, що для збільшення амплітуди корисного сигналу на виході чутливого елементу використовується велика потужність коливань поверхні Землі та велика площа цієї поверхні, і мала площа вхідної частини вимірювального перетворювача датчика і його велика чутливість (тобто необхідність надзвичайно малої потужності, чи амплітуди, корисного сигналу для його роботи),. Таким чином, чутливий елемент датчика, який знаходиться між поверхнею Землі та вимірювальним перетворювачем, повинен бути "збільшуючим амплітуду посередником" акустичним узгоджуючим трансформатором (по аналогії із підвищуючим електричним трансформатором), в якому ефект збільшення 81308 6 амплітуди (тобто отримання коефіцієнту передачі по амплітуді більше 1) досягається за рахунок надзвичайно великої потужності корисного сигналу - коливань поверхні, та великої площі поверхні цих коливань. Тобто, є мала амплітуда корисного сигналу, але при його великій потужності і великій площі коливання, що дає можливість збільшити амплітуду корисного сигналу, але на меншій площі коливання. В основі побудови такого акустичного трансформатора амплітуди використовується закон Бернуллі [8], згідно із яким у трубопроводі із газом чи рідиною, які рухаються або є дія тиску, добуток величини тиску на площу поперечного перетину у будь-якому місці трубопроводу є величиною постійною. Тому в якості чутливого елементу датчика пропонується використати рідину в трубопроводі з діаметром, який рівномірно зменшується вздовж своєї довжини (як у труби грамофона чи у сопла Лаваля) в напрямку від поверхні Землі до вимірювального перетворювача датчика, і наповнений рідиною (наприклад, водою). Край трубопроводу з більшим діаметром герметично закритий пружною мембраною (наприклад, із гуми) і розташовується на поверхні Землі. На протилежному (з меншим діаметром) краї трубопроводу закріплюється вимірювальний перетворювач, який реєструє коливання поверхні рідини у верхній частині трубопроводу. Для уникнення (або істотного зменшення) акустичного короткого замикання між корпусом чутливого елементу та поверхнею Землі необхідно механічно відокремити корпус трубопроводу на деяку відстань від поверхні Землі, щоб тільки пружна мембрана трубопроводу прилягала до поверхні Землі. Для того, щоб корпус трубопроводу знаходився над поверхнею Землі, його поміщають у об'єм з рідиною (наприклад, у замкнутий об'єм чи басейн з водою), а для надання йому позитивної плавучості і підняття його над поверхнею Землі, до корпусу трубопроводу прикріплюється ємність(ємності) із газом (наприклад, повітрям), причому регуляція величини необхідної плавучості (чи глибини занурення трубопроводу і степеня його прилягання до поверхні) здійснюється або зміною розмірів ємності із газом або зміною величини прикріпленого до трубопроводу додаткового вантажу (наприклад, додаванням води в ємність із газом, як це робиться на підводних човнах для регуляції глибини занурення). Для зменшення втрат енергії корисного сигналу на його відбиття від стінок трубопроводу та на розсіювання при його проходженні через трубопровід, пропонується робити зміну діаметру трубопроводу вздовж його довжини по логарифмічному закону (як у соплі Лаваля чи у трубі грамофону), причому внутрішню поверхню трубопроводу полірувати або покрити покриттям для зменшення умов утворення турбулентних явищ (та зменшення гістерезисних втрат знакозмінного корисного сигналу) на межі "стінка трубопроводу - наповнююча рідина" при передачі коливань через трубопровід. 7 Для збільшення ефекту відокремлення всієї конструкції чутливого елементу сейсмодатчика від дна басейну при коливаннях поверхні Землі (тобто, для зменшення коефіцієнта механічного зв'язку між поверхнею та корпусом трубопроводу), конструкції трубопроводу разом із наповненою газом (чи повітрям) ємністю надається така форма, яка має якнайменший гідродинамічний опір (наприклад, краплевидна), причому зовнішня поверхня корпусу чутливого елементу полірується або має відповідне покриття (для зменшення утворення турбулентності на його поверхні при коливаннях поверхні). При використанні у якості басейну для чутливого елементу відкритих водоймищ він ізолюється від дії стихійних переміщень води у різних напрямках з усіх боків оточуючою його стінкою або корпусом, який може бути герметичним або відкритим. Для зменшення впливу температури оточуючого довкілля на глибину занурення чутливого елементу застосовується або стабілізація температури рідини у басейні, або стабілізація відстані між корпусом чутливого елементу та дном басейну (чи поверхнею Землі). Таким чином, пропонована конструкція чутливого елементу датчика є перетворювачем механічних коливань твердих матеріалів поверхні Землі у коливання рідини у трубопроводі, причому це перетворення здійснюється із збільшенням амплітуди коливань без зміни їхньої форми. Принцип дії чутливого елементу сейсмодатчика Ескіз конструкції пристрою наведено на Фіг.1. Власне чутливим елементом датчика є сформований трубопроводом внутрішній об'єм рідини. При такій конструкції чутливий елемент (як на Фіг.1) сприймає тільки вертикальну складову коливань поверхні Землі. Для якнайбільшого відокремлення корпусу чутливого елементу від поверхні Землі корпус трубопроводу 5, наповнений рідиною 8, розташований у басейні 1 із рідиною 2; нижній край трубопроводу закритий пружною мембраною 6, яка щільно (з якнайменшим акустичним опором) прилягає до дна басейну. На другому кінці трубопроводу розміщений вимірювальний перетворювач 4; до корпусу трубопроводу для надання йому позитивної плавучості (щоб відокремити корпус трубопроводу від дня басейну) прикріплена ємність із газом 3, в якій для регуляції глибини занурення чутливого елементу знаходиться баластна рідина 7. Для усунення механічного впливу різних дестабілізуючих перешкод на чутливий елемент датчика (наприклад, раптове нахилення) може застосовуватись його прикріплення до стінок басейну за допомогою кружностей 9. В зв'язку із тим, що стовп рідини у трубопроводі безперервний, передача тиску у трубопроводі підлягає дії закону Бернуллі [8], згідно із яким добуток величини тиску (або амплітуди коливань) рідини на величину площі поперечного перетину трубопроводу у його будь-якому місці є величина постійна. Тоді величини амплітуди коливань рідини у нижній та у верхній частинах 81308 8 трубопроводу будуть співвідноситись як величини площ у цих же місцях. При надходженні вертикальних коливань поверхні Землі через мембрану у рідину трубопроводу (див. Фіг.1) ці коливання через наповнюючу рідину трубопроводу зі швидкістю акустичного сигналу у рідині (у воді - 1454 м/с) передадуться до верхньою краю трубопроводу, при цьому амплітуда коливань рідини у верхній частині трубопроводу буде у стільки разів більшою за амплітуду коливань у нижній частині у скільки разів площа поперечного перетину у нижній частині буде більшою за площу поперечного перетину у верхній частині. Це співвідношення виражає величину "підсилення" (збільшення) амплітуди корисного сигналу у даному пристрої. Тобто, по суті, даний чутливий елемент сейсмодатчика є перетворювачем механічних коливань твердої поверхні Землі у коливання рідини у трубопроводі. Збільшені за амплітудою коливання рідини у верхній частині трубопроводу реєструються, наприклад, або оптоелектронним або ємнісним датчиком (одною із пластин ємності може безпосередньо бути поверхня заповнюючої рідини трубопроводу) вимірювального перетворювача. У зв'язку з тим, що при такій формі трубопроводу в ньому не існують акустичні резонансні явища як, наприклад, у резонаторах Гельмгольца (бо відсутні елементи, які утворюють завихрення, що використовується у духових музикальних інструментах), представлена конструкція чутливого елемента датчика не має піків у своїй амплітудно-частотній характеристиці, а тому її передавальна характеристика є рівномірною. Конструкція пристрою для реєстрації горизонтальної і вертикальної складових коливань поверхні Землі наведена на Фіг.2. Всі елементи конструкції такі самі як і у конструкції на Фіг.1; принцип роботи такий же. Відмінністю є тільки те, що величина амплітуди коливань поверхні Землі, які поступають на вхід чутливого елемента, буде дещо знижена і залежатиме від кута нахилу дна басейну. Технічний результат Поставлені вимоги завдання винаходу узгодження акустичних імпедансів поверхні, яка коливається, та чутливого елементу, істотне зменшення (або усунення) акустичного короткого замикання у широкому діапазоні частот, коефіцієнт передачі корисного сигналу більше 1, рівномірність передавальної характеристики - у пропонованій конструкції пристрою досягнуті, причому уперше отримано чутливий елемент сейсмодатчика із коефіцієнтом передачі корисного сигналу більше 1. Варто додати, що у зв'язку із відсутністю у конструкції чутливого елементу нелінійних елементів він (чутливий елемент) має широкий динамічний діапазон (не менше 100 дБ), який у конструкції сейсмодатчика обмежується тільки нелінійністю вимірювального перетворювача, але це до конструкції даного винаходу не відноситься. Відмітні особливості пропонованих способу та пристрою: 9 а) використання в якості чутливого елементу датчика узгоджуючого акустичного трансформатора у вигляді трубопроводу із діаметром, який рівномірно зменшується від вхідного краю (із більшим діаметром) до вихідного (з меншим діаметром), і який заповнений рідиною, причому вхідний край трубопроводу (із більшим діаметром) закритий пружною мембраною; б) розташування заповненого трубопроводу у басейні, який також заповнений рідиною і знаходиться на поверхні Землі, причому трубопровід своєю мембраною прилягає до дна басейну; в) використання прикріпленого до корпусу трубопроводу ємності із газом для надання трубопроводу позитивної плавучості для підняття трубопроводу над дном басейну для усунення короткого акустичного замикання між трубопроводом та поверхнею Землі; г) використання для регулювання глибини занурення трубопроводу шляхом приєднання до нього регульованої маси (баластної рідини чи металевого тягару). Фіг.1 Ескіз конструкції чутливого елементу сейсмодатчика для сприйняття вертикальної складової коливань поверхні Землі (1 - басейн, в якому знаходиться датчик; 2 - рідина, якою заповнений басейн; 3 - ємність із газом для надання датчику позитивної плавучості; частина ємності заповнена баластною рідиною, кількістю якої регулюється глибина занурення датчика; 4 вимірювальний перетворювач датчика; 5 трубопровід із змінним діаметром; 6 - пружна мембрана, яка забезпечує механічний контакт чутливого датчика із поверхнею Землі; 7 баластна рідина в ємності із газом для регулювання глибини занурення датчика; 8 рідина, яка заповнює трубопровід чутливого елементу, 9 - утримуючі корпус чутливого елементу пружності). Фіг.2 Ескіз конструкції чутливого елемента сейсмодатчика для сприйняття горизонтальної та вертикальної складових коливань поверхні Землі. Елементи конструкції такі ж самі, як і на Фіг.1. Конструкція чутливого елементу датчика є простою і зрозумілою з наведених фігур, і не вимагає для свого здійснення якихось виняткових технологічних процесів чи матеріалів. В самій конструкції немає також протирічивих чи конфліктних технологічних прийомів, які були б необхідні для її виготовлення. Це все підтверджує можливість здійснення винаходу. Перелік використаних джерел: 1. www.pereplet.m/pops/rikov/rikov/html., Рыков А.В. Для чего нужны сейсмографы? 2. wvvw.KM.ru. CD, «Датчик», Большая энциклопедия Кирилла и Мефодия, 2002. 3. Ac. SU 1728821 A 1, Элетродинамический пробразовательный блок сейсмоприемника / А.В.Рыков, № 4782519/25, заяв. 15.12.89, опубл. 23.04.92. Бюл. № 15. 4. Патент SU 1794252 A3, Сейсмоприемник/ Г.В.Григорьев, Ю.Л.Киселева, В.П.Кокшаров и др. № 4844470/25, заяв. 03.07.90, опубл. 07.02.93. Бюл. № 5. 81308 10 5. Патент SU 1806387 A3, Трехкомпонентный пьезоэлектрический сейсмометр /В.М.Френд, № 4946986/25. заяв.19.06.91, опубл. 30.03.93. Бюл. № 12. 6. А.с. SU 1054811 А, Сейсмоприемник /В.В.Тикшаев, Н.Л.Янченко. № 3475371/18-25, заяв.28.07.82. опубл. 1999, Бюл. № 18. 7. www.guralp.com. 8. Кузьмичев В.Е. Законы и формулы физики / Отв. ред.В.К.Тартаковский-Киев:Наукова думка, 1989. - 854с.
ДивитисяДодаткова інформація
Назва патенту англійськоюDetecting element of a surface vibration transducer and a method for measuring surface vibrations
Автори англійськоюPopov Yurii Vasyliovych
Назва патенту російськоюЧувствительный элемент датчика колебаний поверхности и способ измерения колебаний поверхности
Автори російськоюПопов Юрий Васильевич
МПК / Мітки
МПК: G01V 1/16, G01H 17/00
Мітки: поверхні, коливань, реєстрації, датчика, елемент, чутливий, спосіб
Код посилання
<a href="https://ua.patents.su/5-81308-chutlivijj-element-datchika-kolivan-ta-sposib-reehstraci-kolivan-poverkhni.html" target="_blank" rel="follow" title="База патентів України">Чутливий елемент датчика коливань та спосіб реєстрації коливань поверхні</a>
Коаксіальний чутливий елемент датчика

Номер патенту: 58755
Опубліковано: 15.09.2004
Автори: Булдижов Андрій Іванович, Жуков Юрій Даніілович, Гордєєв Борис Миколайович
МПК: G01K 3/00, G01F 23/28
Мітки: коаксіальний, датчика, елемент, чутливий
Формула / Реферат:
1. Спосіб підготування виїмкової дільниці, що включає буріння свердловин із земної поверхні й обсадку їх трубами при проведенні підготовчої виробки, збійку свердловин з підготовчою виробкою і відсмоктування газоповітряної суміші по свердловині, з'єднаної з вентилятором, який відрізняється тим, що підготовчу виробку проводять на початку виїмкової дільниці довжиною 20–30 м, буріння свердловин із земної поверхні здійснюють двома свердловинами,...
Багатокомпонентний чутливий елемент інерціального датчика
Номер патенту: 7176
Опубліковано: 15.06.2005
Автор: Снігур Анатолій Кирилович
МПК: G01P 15/00, G01P 15/13
Мітки: багатокомпонентний, елемент, інерціального, чутливий, датчика
Формула / Реферат:
1. Багатокомпонентний чутливий елемент інерціального датчика, що містить шість активних електромагнітних підвісів з чутливими компонентами, закріпленими на хрестовині і оснащеними зовнішніми зворотними зв'язками, який відрізняється тим, що застосовано електромагнітні підвіси на змінному струмі, у яких чутливі компоненти виконані із матеріалу з високою магнітною проникністю у вигляді Ш-подібних осердь статорів і плоских роторів, при цьому...
Чутливий елемент датчика вологості
Номер патенту: 18290
Опубліковано: 25.12.1997
Автори: Костенко Сергій Петрович, Августімов Віталій Леонідович, Бідник Дмитро Ілліч, Насипайко Олександр Васильович, Остапчук Анатолій Іванович
МПК: G01N 27/12
Мітки: вологості, елемент, датчика, чутливий
Формула / Реферат:
Чувствительный элемент датчика влажности, содержащий кремниевую пластину, на поверхность которой последовательно нанесены слои окисла и нитрида кремния, поверх последнего сформирован в виде прямоугольных полос слой поликристаллического кремния с двумя электродами, легированного ионами элементов III или V групп, с нанесенным материалом, сорбирующим влагу, отличающийся тем, что слой поликремния сформирован в виде двух ортогональных по осям...
Чутливий елемент газоаналізатора
Номер патенту: 76898
Опубліковано: 15.09.2006
Автори: Федоренко Ольга Олександрівна, Загоруйко Юрій Анатолійович, Коваленко Назар Олегович
МПК: G01N 27/02
Мітки: елемент, чутливий, газоаналізатора
Формула / Реферат:
1. Чутливий елемент газоаналізатора, який містить ізолюючу підкладинку, з однієї сторони якої розташований напівпровідниковий чутливий шар, а на протилежній стороні нагріваючий елемент, і електроди, який відрізняється тим, що ізолюючою підкладинкою є шар високоомного кристалічного твердого розчину ZnSxSe1-x, де 0<х<1, або Zn1-yMgySe, де 0<у<0,5, чутливим шаром є окислений шар матеріалу підкладинки, який містить не менше однієї...
Чутливий елемент тензодатчика
Номер патенту: 31144
Опубліковано: 15.12.2000
Автори: Чорноус Анатолій Миколайович, Проценко Сергій Іванович, Однодворець Лариса Валентинівна
МПК: G01B 7/16
Мітки: тензодатчика, чутливий, елемент
Текст:
...розсіювання носіїв елекіричпого сіруму порівняно Ї ірадиційними механізмами для одношарових - межа рощілу між окремими шарами. Це в свою чергу приводить до збільшення коефіцієнта тензочутливості (у) бага і ошарового плівкового зразка порівняно з одношарового такої ж товщини. Дослідження залежності коефіцієнтів тензочутливості від товщини одно- та багатошарових плівок на основі Cr, Ni та Co показує, що тензочутливісгь багаїошаровоі плівкової...
Попередній патент: Спосіб роботи морського ерліфта та система для його реалізації
Випадковий патент: Установка агретування вітродвигуна з робочою машиною