Механізм приводу лінійки маніпулятора стана гарячої прокатки
Номер патенту: 82317
Опубліковано: 25.07.2013
Автори: Бобух Іван Олексійович, Антонюк Євген Якович, Забуга Артем Геннадійович, Соколов Єгор Валентинович, Федоренко Людмила Миколаївна
Формула / Реферат
Механізм приводу лінійки маніпулятора стана гарячої прокатки, що містить лінійку, сполучені з нею дві штанги, на кожній з яких розташовані по одній зубчастій рейці, що зачеплені з двома зубчастими колесами, закріпленими на загальному валу з приводом від електродвигуна, який відрізняється тим, що перша штанга сполучена з лінійкою сферичним шарніром з пальцем, який допускає два незалежні обертальні рухи навколо вертикальної та поперечної горизонтальної осей і розташована в двох сферичних шарнірах, що допускають її поздовжній рух і поворот, а друга штанга сполучена з лінійкою через додаткову ланку з двома вертикальними обертальними шарнірами на кінцях, причому штанга знаходиться в двох сферичних підшипниках з можливістю її відносно них поздовжнього переміщення і повороту, а зубчасті колеса, мають заокруглену форму робочої поверхні зубів і закріплені на загальному валу, який розташований в двох сферичних підшипниках, один з яких фіксує вал від осьового зсуву, а сам вал сполучений пружною муфтою з двигуном.
Текст
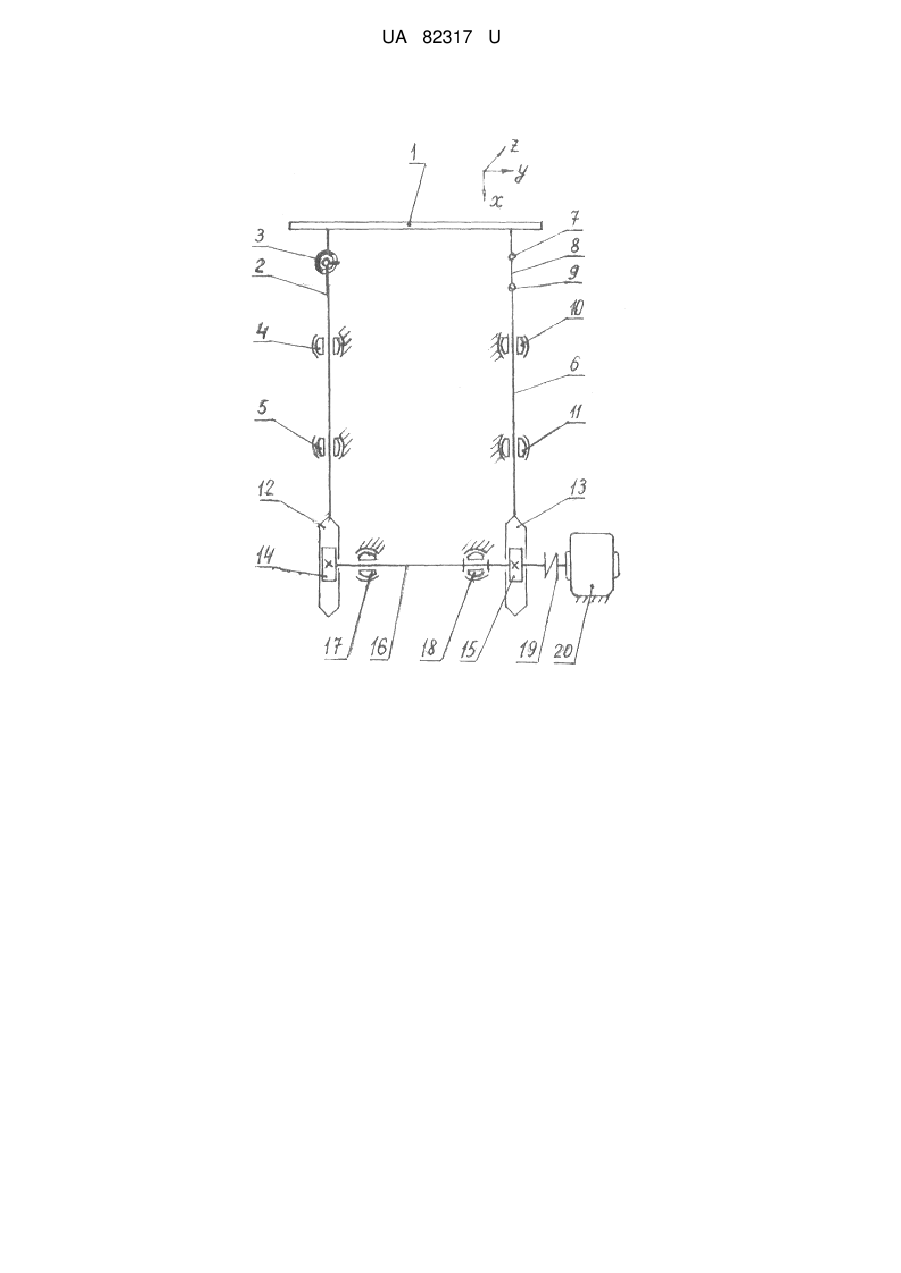
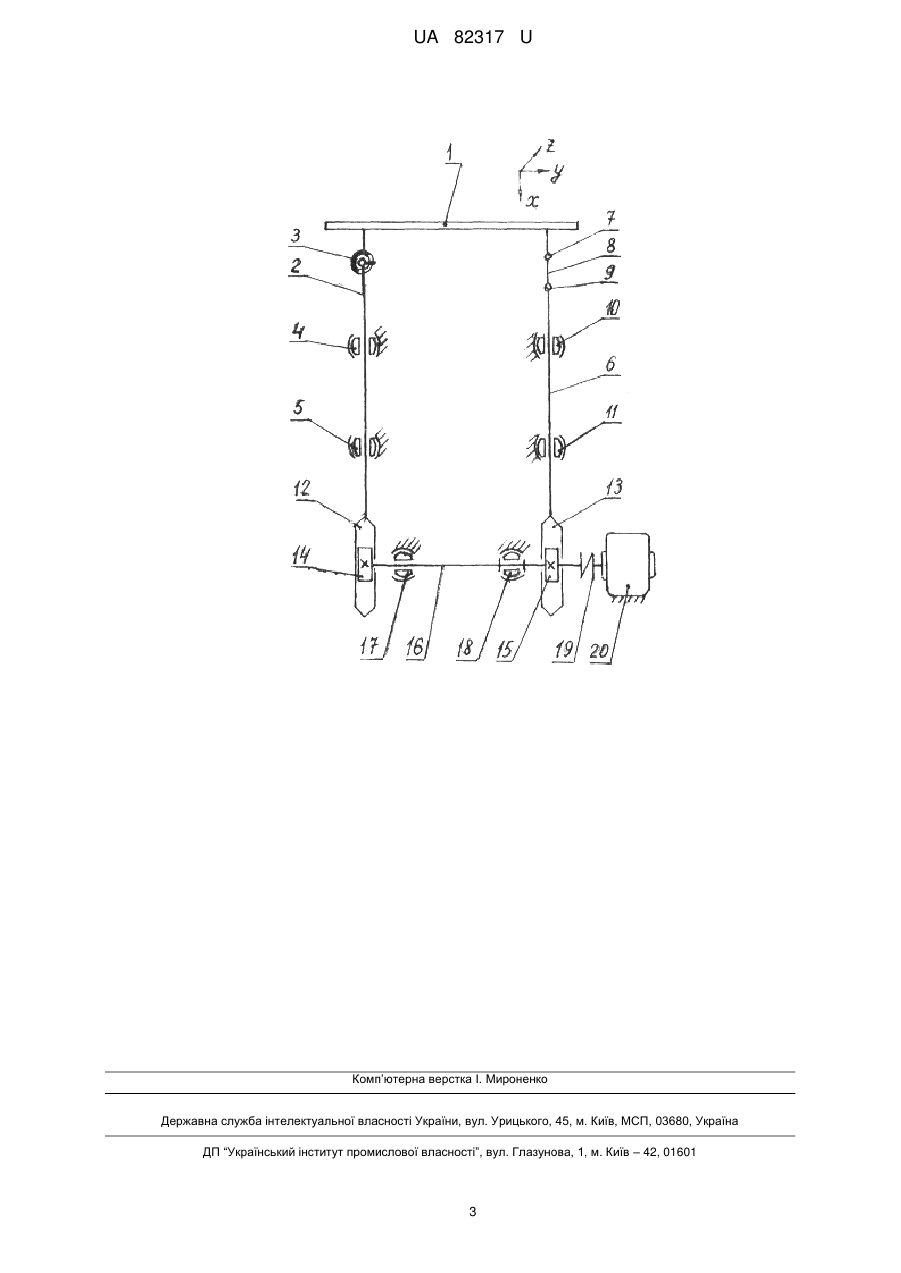
Реферат: Механізм приводу лінійки маніпулятора стана гарячої прокатки містить лінійку, дві штанги, зубчасті рейки, зубчасті колеса, вал приводом від електродвигуна. Перша штанга сполучена з лінійкою сферичним шарніром з пальцем, який допускає два незалежні обертальні рухи навколо вертикальної та поперечної горизонтальної осей і розташована в двох сферичних шарнірах, що допускають її поздовжній рух і поворот. Друга штанга сполучена з лінійкою через додаткову ланку з двома вертикальними обертальними шарнірами на кінцях. Причому штанга знаходиться в двох сферичних підшипниках з можливістю її відносно них поздовжнього переміщення і повороту. Зубчасті колеса мають заокруглену форму робочої поверхні зубів і закріплені на загальному валу, який розташований в двох сферичних підшипниках, один з яких фіксує вал від осьового зсуву, а сам вал сполучений пружною муфтою з двигуном. UA 82317 U (54) МЕХАНІЗМ ПРИВОДУ ЛІНІЙКИ МАНІПУЛЯТОРА СТАНА ГАРЯЧОЇ ПРОКАТКИ UA 82317 U UA 82317 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до галузі металургійного машинобудування і може знайти застосування при проектуванні та побудові станів гарячої прокатки. Відомий механізм приводу лінійки маніпулятора стана гарячої прокатки [1], який містить лінійку, дві штанги, що з'єднані з лінійкою, зубчасті рейки, які переміщуються від зубчастих коліс, розташованих на валу, який приводиться в обертання електродвигуном. Недоліком такого механізму є жорстке з'єднання штанг з лінійкою, що не допускає їх відносного повороту. В результаті із-за неминучих похибок виготовлення базових розмірів ланок і збирання механізму при русі виникають затиснення і перевантаження, які знижують надійність і довговічність. Найбільш близьким за технічною суттю та отриманими результатами є пристрій [2], вибраний за прототип, який включає лінійку, дві штанги, що з'єднані з лінійкою і розміщені в напрямних поступального руху, дві зубчасті рейки, що переміщуються за допомогою штанг і взаємодіють з розташованими на спільному валу двома зубчастими колесами з приводом від електродвигуна через зубчасту муфту. Лінійка насаджена на виступи кінцівок балок штанг. Недоліком найближчого аналога є те, що в конструкції з'єднання лінійок зі штангами існують суттєві зазори, які при роботі приводять до високих динамічних навантажень і ударів. Крім того, внаслідок неминучих похибок виготовлення базових розмірів деталей, зборка механізму можлива тільки за рахунок введення додаткових зазорів в рухливих з'єднаннях або примусової деформації ланок і їх з'єднань, тобто внесення додаткового пасивного навантаження механізму. При роботі такого механізму рухомі поверхні сполучених ланок будуть прилягати з перекосами, зміщуваннями та кромковим контактом, що приводить до підвищення зносу. В замкнутому контурі рухомих ланок, які складаються з лінійки, штанг, зачеплень зубчастих рейок з зубчастими колесами, вала зубчастих коліс, відбувається неоднакове навантаження однойменних ланок і підшипників паралельних ланцюгів механізму, а також нецентральне прикладення сумарних зусиль зачеплень по ширині зубів. В результаті виникають затиснення і перевантаження, знижується надійність, довговічність і точність прокатного устаткування, збільшується витрата електроенергії. Задачею технічного рішення є розробка механізму приводу лінійки маніпулятора стана гарячої прокатки, в якому відсутні зазори та додаткові пасивні навантаження його кінематичного ланцюга внаслідок допустимих стандартами похибок виготовлення базових розмірів ланок та їх рухомих з'єднань, зниження загальних навантажень, виключення ударів при роботі, підвищення надійності, довговічності, точності. Поставлена задача вирішується тим, що у відомій конструкції введено необхідні додаткові рухливості кінематичного ланцюга механізму, такі, що забезпечують невимушені зборку і рух механізму, а також його безударну роботу. Для цього рухоме сполучення лінійки і однієї штанги виконано як сферичний шарнір з пальцем з двома незалежними обертальними рухами навколо вертикальної та поперечної горизонтальною осями. Між лінійкою та другою штангою введена додаткова ланка, яка з'єднана з лінійкою та штангою двома обертальними шарнірами на кінцях ланки, кожний з вертикальною віссю обертання. Кожна штанга розміщена в двох сферичних підшипниках і з нею нерухомо з'єднано по одній зубчастій рейці. Робоча поверхня зубів зубчастих коліс має заокруглену форму по ширині зубів. Вал, на якому закріплені зубчасті колеса приводу зубчастих рейок, розташований в сферичних підшипниках і зафіксований від переміщень вздовж осі. Привід зубчастих коліс здійснено від електродвигуна через пружну муфту. Всі ланки кінематичного ланцюга встановлені невимушено при неминучих відхиленнях базових конструктивних розмірів від номінальних [3, 4]. У системі відсутні затиснення в рухомих з'єднаннях та ударні навантаження, що підвищує надійність, довговічність та точність. Механізм приводу другої лінійки маніпулятора аналогічний вищевикладеному. На представленому кресленні зображена конструкція механізму приводу лінійки маніпулятора виконана таким чином: з лінійкою 1 сполучено дві штанги (2, 6), перша з яких (2) сферичним шарніром (3) з двома незалежними обертальними рухами навколо вертикальної та поперечної горизонтальними осями. Штанга 2 знаходиться в двох сферичних підшипниках 4 і 5. Друга штанга 6 сполучена з лінійкою 1 за допомогою додаткової ланки 8, на кінцях якої розміщені обертальні шарніри 7 і 9 з вертикальними осями, паралельними осі z. Штанга 6 розташована в двох сферичних підшипниках 10 і 11. На кінцях штанг 2 і 6 нерухомо з ними розташовані зубчасті рейки 12 і 13, що зачеплені із зубчастими колесами 14 і 15, розташованими на валу 16, який розміщений в сферичних підшипниках 17 і 18, причому вал зафіксований від осьового переміщення підшипником 18. Вал 16 через пружну муфту 19 з'єднаний з електродвигуном 20. Рухомі з'єднання і розташування ланок забезпечують невимушений рух механізму без додаткових натягів, тобто таких, які не пов'язані з передачею технологічного навантаження. 1 UA 82317 U 5 10 15 20 Механізм працює наступним чином. Штанга 2 і штанга 6 невимушено розташовані в сферичних підшипниках 4, 5 та 10, 11 на станині з можливістю повздовжнього та обертального руху відносно них. Геометричні осі штанг 2 і 6 із-за похибок виготовлення є схрещеними прямими. Лінійка 1 невимушено приєднана до непаралельних штанг 2 та 6 за рахунок наявності додаткової ланки 8 та шарнірів 3, 7 і 9. Привід штанг здійснено від зубчастих рейок через зубчасті колеса 14 і 15 з заокругленою формою зубів, чим забезпечено центрування по ширині зуба зусилля зачеплення, відсутність кромкового контакту та натягу. Сферичними підшипниками 17 і 18 забезпечена невимушена установка вала 16 при неспіввісності циліндричних поверхонь вала під ці підшипники в процесі обертання. Наведені компенсаційні рухи ланок виключають додаткові навантаження при роботі механізму, підвищують його надійність, довговічність та точність. Джерела інформації: 1. Целиков А.И., Полухин П.И., Гребенник В.М. и др. Машины и агрегаты металлургических заводов. В 3-х томах. Т. 3. Машины и агрегаты для производства и отделки проката. - М.: Металлургия, 1981. - С. 304. 2. Королев А.А. Механическое оборудование прокатных цехов. - М.: гос. н.-т. издат. лит. по черной и цветной металлургии, 1959. - С. 202-204. 3. Кожевников С.Н. Основания структурного синтеза механизмов. - К.: Наук, думка, 1979.232 с. 4. Решетов Л.Н. Самоустанавливающиеся механизмы. - М.: Машиностроение, 1985.-272 с. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 25 30 35 Механізм приводу лінійки маніпулятора стана гарячої прокатки, що містить лінійку, сполучені з нею дві штанги, на кожній з яких розташовані по одній зубчастій рейці, що зачеплені з двома зубчастими колесами, закріпленими на загальному валу з приводом від електродвигуна, який відрізняється тим, що перша штанга сполучена з лінійкою сферичним шарніром з пальцем, який допускає два незалежні обертальні рухи навколо вертикальної та поперечної горизонтальної осей і розташована в двох сферичних шарнірах, що допускають її поздовжній рух і поворот, а друга штанга сполучена з лінійкою через додаткову ланку з двома вертикальними обертальними шарнірами на кінцях, причому штанга знаходиться в двох сферичних підшипниках з можливістю її відносно них поздовжнього переміщення і повороту, а зубчасті колеса, мають заокруглену форму робочої поверхні зубів і закріплені на загальному валу, який розташований в двох сферичних підшипниках, один з яких фіксує вал від осьового зсуву, а сам вал сполучений пружною муфтою з двигуном. 2 UA 82317 U Комп’ютерна верстка І. Мироненко Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
Назва патенту англійськоюDrive mechanism of manipulator bar of hot rolling mill
Автори англійськоюAntoniuk Yevhen Yakovych, Zabuha Artem Hennadiiovych, Bobukh Ivan Oleksiiovych, Sokolov Yehor Valentynovych, Fedorenko Liudmyla Mykolaivna
Назва патенту російськоюМеханизм привода линейки манипулятора стана горячей прокатки
Автори російськоюАнтонюк Евгений Яковлевич, Забуга Артем Геннадьевич, Бобух Иван Алексеевич, Соколов Егор Валентинович, Федоренко Людмила Николаевна
МПК / Мітки
МПК: B21B 39/16
Мітки: маніпулятора, прокатки, приводу, лінійки, стана, механізм, гарячої
Код посилання
<a href="https://ua.patents.su/5-82317-mekhanizm-privodu-linijjki-manipulyatora-stana-garyacho-prokatki.html" target="_blank" rel="follow" title="База патентів України">Механізм приводу лінійки маніпулятора стана гарячої прокатки</a>
Механізм подачі та повороту стана холодної прокатки труб
Номер патенту: 86688
Опубліковано: 12.05.2009
Автори: Пройдак Юрій Сергійович, Аміров Ібрагім Масхудович, Король Радомір Миколайович
МПК: B21B 21/06, B21B 21/04
Мітки: труб, холодної, подачі, повороту, механізм, прокатки, стана
Формула / Реферат:
Механізм подачі та повороту стана холодної прокатки труб, що включає кінематично зв'язаний з головним двигуном приводу робочої кліті ведучий вал, на якому посаджені фіксатор і два кривошипи з двома пальцями, виконаними з можливістю періодичної взаємодії з мальтійським хрестом, який сполучений через систему шестерень з гвинтом і гайкою, жорстко зв'язаною з патроном затиску заготівки, при цьому гвинт кінематично зв'язаний через муфту зчеплення...
Спосіб виміру натягу штаби між двома клітями стана гарячої прокатки

Номер патенту: 68308
Опубліковано: 15.07.2004
Автори: Леонідов-Канєвський Євген Володимирович, Гагарін Павло Павлович
МПК: B21B 37/00
Мітки: виміру, гарячої, прокатки, штаби, клітями, спосіб, натягу, двома, стана
Формула / Реферат:
1. Спосіб виміру натягу штаби між двома клітями стана гарячої прокатки, відповідно до якого безперервно вимірюють момент і зусилля прокатки першої кліті, перед заправленням штаби в другу кліть визначають для першої кліті плече прикладання зусилля прокатки, що дорівнює відношенню моменту до зусилля прокатки, а після заправлення штаби в другу кліть обчислюють момент вільної прокатки першої кліті як добуток раніше обчисленого плеча на поточне...
Тунельна система для прокатного стана гарячої прокатки полоси

Номер патенту: 26135
Опубліковано: 07.06.1999
Автори: Бруно Ді Гьюсто, Алессандро Доріго
МПК: B22D 11/12
Мітки: прокатки, гарячої, прокатного, стана, система, полоси, тунельна
Формула / Реферат:
1. Тоннельная система для прокатного стана горячей прокатки полосы, связанная с, по меньшей мере, одной линией непрерывной разливки тонких листов, содержащая накопитель, отличающаяся тем, что она снабжена соединенными с каждой линией непрерывной разливки первыми по ходу процесса теплоизолированными тоннелями и установленными за ними вторыми тоннелями с печами для выравнивания температуры листа, размещенными последовательно между установкой...
Активний транспортуючий пристрій для проміжного перемотувального пристрою смугового стана гарячої прокатки

Номер патенту: 101014
Опубліковано: 25.02.2013
Автори: Даріні Маурізіо, МкКеней Карл, Муррай Мартін, Рублі Діно
МПК: B21C 47/24
Мітки: смугового, пристрою, гарячої, пристрій, прокатки, проміжного, транспортуючий, активний, стана, перемотувального
Формула / Реферат:
1. Пристрій для активного транспортування рулону гарячого металу усередині проміжного перемотувального пристрою смугового стана гарячої прокатки з використанням роликів, кожний з яких обертається на осі обертання, який містить:вузол першої рулонної люльки, що приймає рулон гарячого металу у процесі його намотування і у процесі подальшого початку його розмотування, причому вказаний вузол першої рулонної люльки містить приймальний...
Розподільний подавально-поворотний механізм стана холодної прокатки труб
Номер патенту: 21826
Опубліковано: 30.04.1998
Автори: Король Микола Миколайович, Буряк Юрій Григорович, Орещенко Віктор Федорович, Лисенко Олександр Валентинович, Король Радомір Миколайович, Смолянов Георгій Миколайович, Григорченко Віктор Іванович, Калашніков Юрій Леонідович, Журба Олександр Савелієвич, Півник Юрій Вікторович
МПК: B21B 21/06
Мітки: прокатки, механізм, подавально-поворотний, стана, труб, розподільний, холодної
Формула / Реферат:
Распределительный подающе-поворотный механизм стана холодной прокатки труб, содержащий приводной вал с кулачком, параллельно расположенные ему два вала с обгонными муфтами и вал с кулисно-рычажной системой, два взаимодействующих с кулачком роликовых рычага, один из которых установлен на валу с кулисно-рычажной системой и регулятор величины подачи, отличающийся тем, что регулятор величины подачи выполнен в виде рядом установленных на...
Попередній патент: Скальпель для закритої малоінвазивної тенотомії
Наступний патент: Спосіб виробництва м’ясних та/або рибних продуктів
Випадковий патент: Шибер димовий