Комп’ютерна система контролю кутового переміщення рульової поверхні літака
Номер патенту: 96478
Опубліковано: 10.02.2015
Формула / Реферат
Комп'ютерна система контролю кутового переміщення рульової поверхні літака, що містить об'єкт контролю, перетворювач, вихідну шину, яка відрізняється тим, що оснащена персональним комп'ютером, який через з'єднувальний інтерфейс сполучений з вихідною шиною, керуючим пристроєм, що з'єднаний з переміщувачами по осі X, по осі Y, по осі Z, які сполучені з фотоприймачем, оптично зв'язаним із джерелом інфрачервоного випромінювання оптронного блока і під'єднаним до перетворювача, підключеного до персонального комп'ютера, причому джерело інфрачервоного випромінювання установлено на об'єкті контролю.
Текст
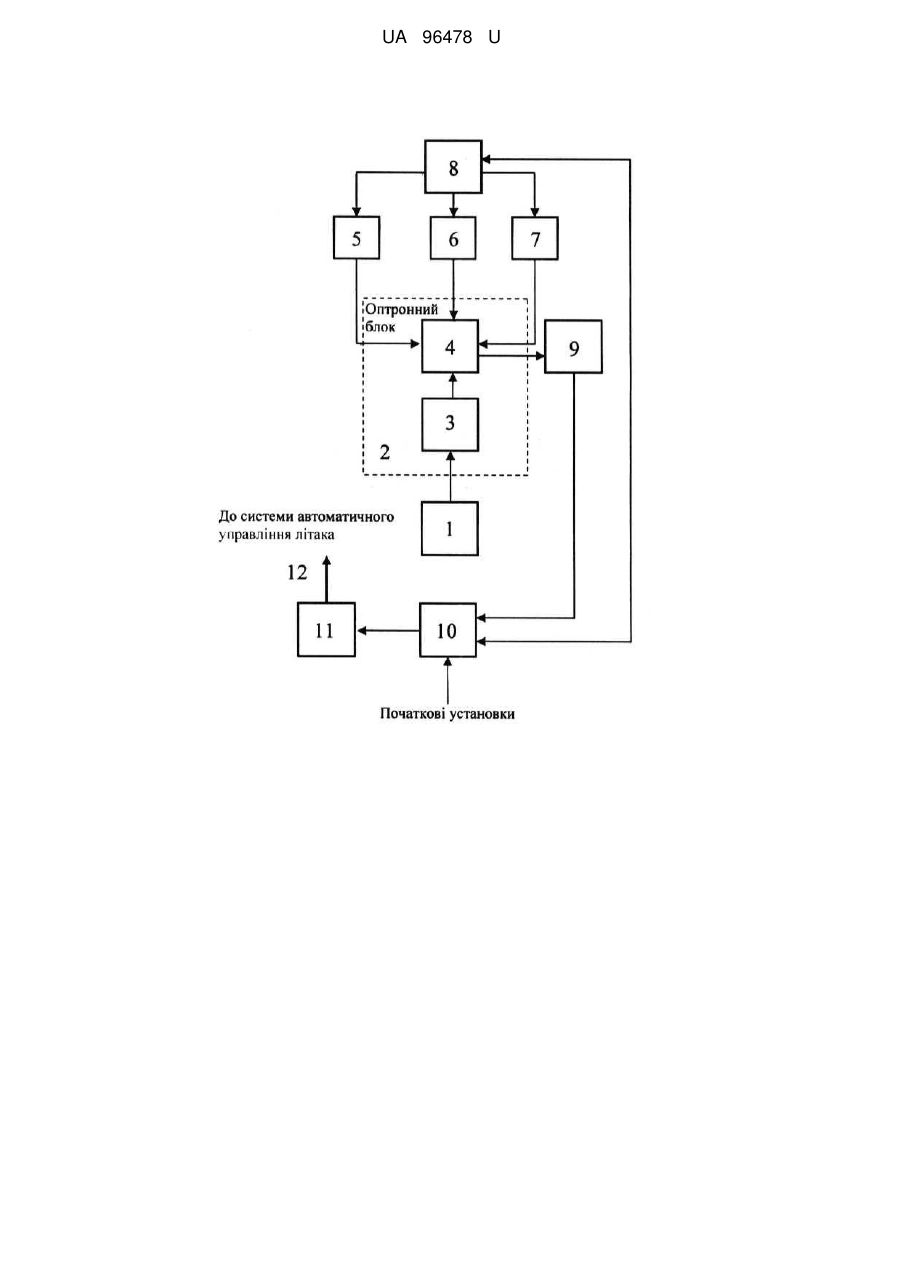
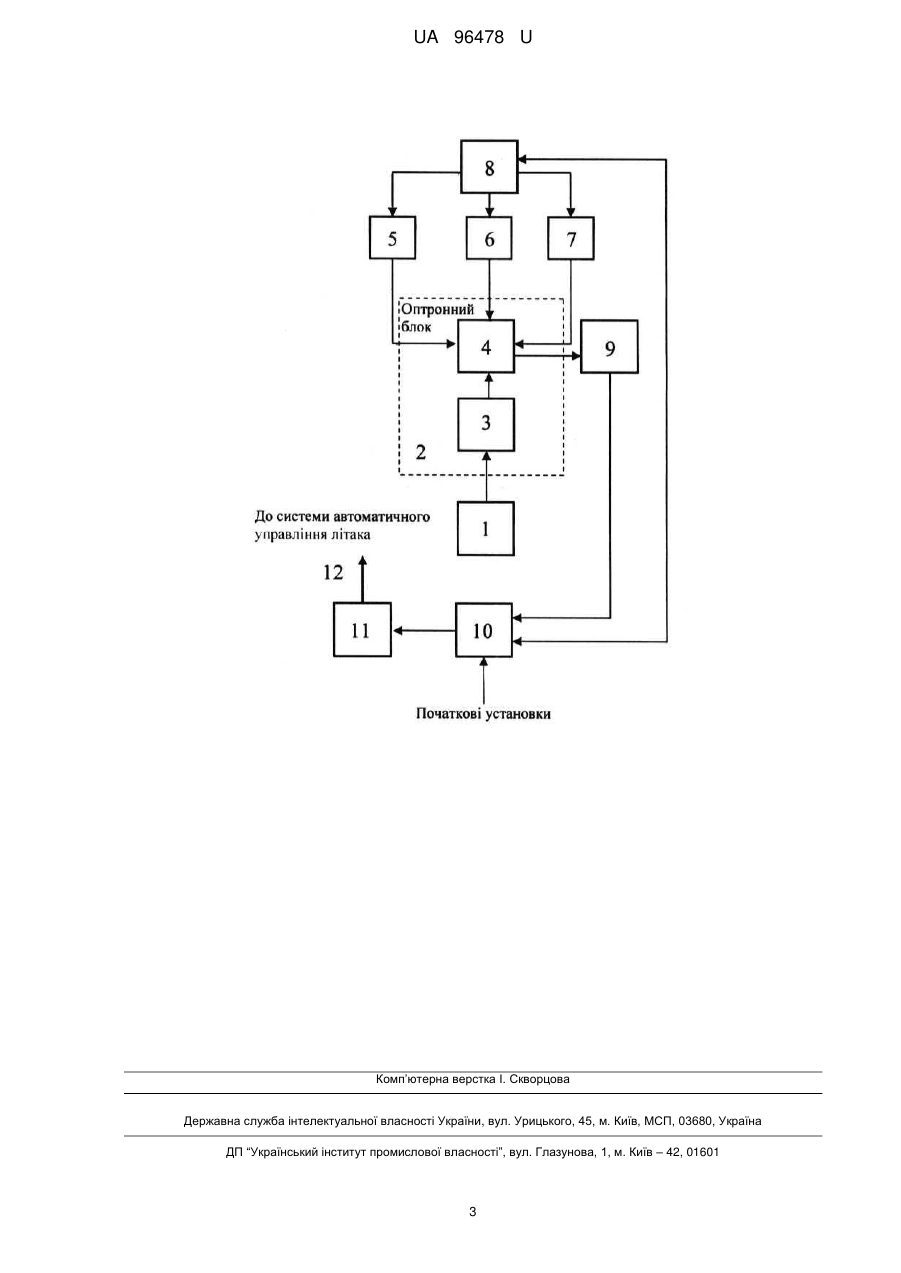
Реферат: UA 96478 U UA 96478 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до авіаційної контрольно-вимірювальної техніки і призначена для перевірки технічного стану рульових поверхонь літака та працездатності систем управління цими поверхнями. Відомий пристрій для моделювання процесів вимірювання фотоелектричним датчиком кутового відхилення рульової поверхні літака, що містить оптично зв'язані випромінювач, світловоди та фотоприймальний блок, затискач для закріплення випромінювача на краю рульової поверхні, а торці світловодів укладені по дузі кола, яке окреслюється рульовою поверхнею, з радіусом, що дорівнює довжині рульової поверхні, при цьому дуга кола розташована в площині, перпендикулярній до рульової поверхні літака, який відрізняється тим, що введені електроприводи горизонтального і вертикального переміщення, передавальний механізм горизонтального переміщення, механізм поступального та обертального руху рульової поверхні літака, які змонтовані на горизонтальних та вертикальних стійках, закріплених на станині, причому електроприводи горизонтального і вертикального переміщення підключені до блока керування (Пат. №57497, Україна, МПК (2011) G 01 В 11/00, Бюл. № 4, 25.02.2011). Недоліками корисної моделі є використання великої кількості фотоприймачів, відмінність умов моделювання від реальних через використання системи керування рульовою поверхнею літака, що не належить безпосередньо літальному апарату, неможливість отримувати візуальну загальну характеристику відхилення від норми кутового переміщення по всім контрольним точкам. Найбільш близькою до запропонованої є автоматична система контролю рульових поверхонь літака (Цеховський М.В. Застосування автоматизованих засобів при контролі кута відхилення рульової поверхні літака //Радіоелектронні і комп'ютерні системи. - 2009. - №3.С.48-51), що містить об'єкт контролю, вихідну шину, перетворювач. Недоліками представленої системи є використання великої кількості фотоприймачів, відсутність можливості змінювати кількість контрольних точок та отримувати візуальну загальну характеристику відхилення від норми кутового переміщення по всіх контрольних точках, а також можливості підключатись до системи автоматичного управління літака. В основу корисної моделі поставлено задачу розробити комп'ютерну систему контролю кутового переміщення рульової поверхні літака з використанням одного фотоприймача, відтворенням реальних умов у процесі контролю, розширити функціональні можливості системи контролю шляхом включення до її складу персонального комп'ютера. Для вирішення поставленої задачі комп'ютерна система контролю кутового переміщення рульової поверхні літака, що містить об'єкт контролю, перетворювач, вихідну шину, згідно з корисною моделлю оснащена персональним комп'ютером, який через з'єднувальний інтерфейс сполучений з вихідною шиною, керуючим пристроєм, що з'єднаний з переміщувачами по осі X, по осі Y, по осі Z, які сполучені з фотоприймачем, оптично зв'язаним із джерелом інфрачервоного випромінювання оптронного блока і під'єднаним до перетворювача, підключеного до персонального комп'ютера, причому джерело інфрачервоного випромінювання установлено на об'єкті контролю. Застосування персонального комп'ютера, який через з'єднувальний інтерфейс сполучений з вихідною шиною, а також має безпосередній зв'язок з керуючим пристроєм, дозволяє використати один фотоприймач, відтворити реальні умови процесу контролю, змінювати кількість контрольних точок та отримувати візуальну загальну характеристику відхилення від норми кутового переміщення по всім контрольним точкам, підключатись до системи автоматичного управління літака. На кресленні зображена функціональна схема комп'ютерної системи. Комп'ютерна система контролю кутового переміщення рульової поверхні літака, що містить об'єкт контролю 1, оптронний блок 2, який складається з джерела інфрачервоного випромінювання 3 та фотоприймача 4, положення якого у просторі регулюється переміщувачем по осі X 5, переміщувачем по осі Υ 6, переміщувачем по осі Ζ 7, входи яких з'єднані з виходами керуючого пристрою 8, перетворювач 9, вхід якого під'єднаний до фотоприймача, а вихід - до персонального комп'ютера 10, що підключений до керуючого пристрою 8, а через з'єднувальний інтерфейс 11 сполучений з вихідною шиною 12. Комп'ютерна система контролю кутового переміщення рульової поверхні літака може працювати в двох режимах: ручному та автоматичному. Якщо система автоматичного управління літака дозволяє приєднання зовнішніх пристроїв, тоді комп'ютерна система контролю буде працювати в автоматичному режимі у такий спосіб. Персональний комп'ютер 10 передає код номера контрольної точки кутового переміщення в керуючий пристрій 8, який по ньому формує сигнал для переміщувачів по осі X 5, по осі Υ 6, по осі Ζ 7 для установлення фотоприймача 4 оптронного блока 2 у відповідне положення. Керуючий пристрій 8 сигналізує 1 UA 96478 U 5 10 15 про завершення установки персональному комп'ютеру 10, який після цього передає контрольне значення кутового переміщення через з'єднувальний інтерфейс 11 на вихідну шину 12, з якої ця інформація зчитується системою автоматичного управління літака. Об'єкт контролю 1 при переміщенні змінює положення джерела інфрачервоного випромінювання 3 відносно фотоприймача 4 оптронного блока 2, в результаті чого на виході фотоприймача 4 з'являється сигнал пропорційний кутовому переміщенню об'єкту контролю 1. Цей сигнал надходить на вхід перетворювача 9, де формується цифровий код, що передається для подальшої обробки у персональному комп'ютері 10. При ручному режимі роботи сигнал з комп'ютера на вихідну шину 12 не надходить. У пам'яті персонального комп'ютера зберігаються наступні дані: кількість контрольних точок, їхнє числове значення, відповідні кодові значення координат фотоприймача для кожної контрольної точки відповідного виду літака, що визначається експериментально, функція перетворення отриманого коду у величину кутового переміщення. Таким чином, при використанні спеціального програмного забезпечення можна отримати: значення реального кутового переміщення рульової поверхні літака та похибку відхилення від номінального значення у кожній контрольній точці, графічне зображення отриманих даних на екрані персонального комп'ютера. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 20 25 Комп'ютерна система контролю кутового переміщення рульової поверхні літака, що містить об'єкт контролю, перетворювач, вихідну шину, яка відрізняється тим, що оснащена персональним комп'ютером, який через з'єднувальний інтерфейс сполучений з вихідною шиною, керуючим пристроєм, що з'єднаний з переміщувачами по осі X, по осі Y, по осі Z, які сполучені з фотоприймачем, оптично зв'язаним із джерелом інфрачервоного випромінювання оптронного блока і під'єднаним до перетворювача, підключеного до персонального комп'ютера, причому джерело інфрачервоного випромінювання установлено на об'єкті контролю. 2 UA 96478 U Комп’ютерна верстка І. Скворцова Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
Автори англійськоюKoshovyi Mykola Dmytrovych, Burleiev Oleh Leonidovych
Автори російськоюКошевой Николай Дмитриевич, Бурлеев Олег Леонидович
МПК / Мітки
МПК: G06N 99/00
Мітки: переміщення, рульової, літака, комп'ютерна, поверхні, система, кутового, контролю
Код посилання
<a href="https://ua.patents.su/5-96478-kompyuterna-sistema-kontrolyu-kutovogo-peremishhennya-rulovo-poverkhni-litaka.html" target="_blank" rel="follow" title="База патентів України">Комп’ютерна система контролю кутового переміщення рульової поверхні літака</a>
Фотоелектричний датчик кутового переміщення рульової поверхні літака
Номер патенту: 27040
Опубліковано: 10.10.2007
Автори: Оганесян Артем Семенович, Кошовий Микола Дмитрович
МПК: G01B 11/26
Мітки: літака, датчик, поверхні, рульової, фотоелектричний, переміщення, кутового
Формула / Реферат:
Фотоелектричний датчик кутового переміщення рульової поверхні літака, що містить оптично зв'язані випромінювач, світловоди та фотоприймальний блок, який відрізняється тим, що додатково містить затискач для закріплення випромінювача на краю рульової поверхні, а торці світловодів укладені по дузі кола, яке окреслюється рульовою поверхнею, з радіусом, що дорівнює довжині рульової поверхні, при цьому дуга кола розташована в площині,...
Оптронний датчик кутового переміщення рульової поверхні літака

Номер патенту: 33535
Опубліковано: 25.06.2008
Автори: Цеховський Максим Володимирович, Оганесян Артем Семенович, Кошовий Микола Дмитрович
МПК: G01B 11/26
Мітки: рульової, датчик, переміщення, оптронний, кутового, літака, поверхні
Формула / Реферат:
Оптронний датчик кутового переміщення рульової поверхні літака, що містить випромінювач, затискач для його закріплення та тримач, що являє собою дугу кола, яка окреслюється рульовою поверхнею, з радіусом, що дорівнює довжині рульової поверхні, при цьому дуга кола розташована в площині, перпендикулярній до рульової поверхні літака, який відрізняється тим, що як випромінювач використано ІЧ-діод, а на тримачі закріплено фотодіоди, що реагують на...
Цифровий датчик кутового переміщення рульової поверхні літака

Номер патенту: 36496
Опубліковано: 27.10.2008
Автори: Цеховський Максим Володимирович, Кошовий Микола Дмитрович, Оганесян Артем Семенович
МПК: G01B 11/26
Мітки: рульової, цифровий, поверхні, літака, кутового, датчик, переміщення
Формула / Реферат:
Цифровий датчик кутового переміщення рульової поверхні літака, що містить ІЧ-діод як випромінювач, затискач для його закріплення, фотодіоди, що реагують на інфрачервоне проміння, які закріплені на тримачі, що являє собою дугу кола, яка окреслюється рульовою поверхнею, з радіусом, що дорівнює довжині рульової поверхні, при цьому дуга кола розташована в площині, перпендикулярній до рульової поверхні літака, фотодіоди з'єднані зі входами...
Пристрій для вимірювання кутового відхилення рульової поверхні літака
Номер патенту: 46220
Опубліковано: 10.12.2009
Автори: Кошовий Микола Дмитрович, Оганесян Артем Семенович, Цеховський Максим Володимирович
МПК: G01B 11/26
Мітки: поверхні, пристрій, рульової, вимірювання, відхілення, кутового, літака
Формула / Реферат:
Пристрій для вимірювання кутового відхилення рульової поверхні літака, що містить ІЧ-діод як випромінювач, затискач для його закріплення, фотоприймачі, що реагують на інфрачервоне проміння, які закріплені на тримачі, що являє собою дугу кола, яка окреслюється рульовою поверхнею, з радіусом, що дорівнює довжині рульової поверхні, при цьому дуга кола розташована в площині, перпендикулярній до рульової поверхні літака, фотодіоди з'єднані зі...
Цифровий оптронний датчик кутового переміщення рульової поверхні літака
Номер патенту: 36500
Опубліковано: 27.10.2008
Автори: Цеховський Максим Володимирович, Оганесян Артем Семенович, Кошовий Микола Дмитрович
МПК: G01B 11/26
Мітки: цифровий, рульової, поверхні, літака, оптронний, кутового, переміщення, датчик
Формула / Реферат:
Цифровий оптронний датчик кутового переміщення рульової поверхні літака, що містить ІЧ-діод як випромінювач, затискач для його закріплення, фотодіоди, що реагують на інфрачервоне проміння, які закріплені на тримачі, що являє собою дугу кола, яка окреслюється рульовою поверхнею, з радіусом, що дорівнює довжині рульової поверхні, при цьому дуга кола розташована в площині, перпендикулярній до рульової поверхні літака, фотодіоди з'єднані зі...
Попередній патент: Застосування цис-тетрагалогеноди-m-адамантилкарбоксилати диренію (ііі), як сполук, що проявляють гепатопротекторну та гепатомодулюючу активність
Наступний патент: Формувач одиночної триімпульсної кодової серії з програмованими часовими параметрами
Випадковий патент: Установка для первинної переробки рослинної сировини холодним способом