Адаптивна система багатопараметричного регулювання
Номер патенту: 97184
Опубліковано: 10.03.2015
Автори: Наку Сергій Олегович, Ладанюк Анатолій Петрович, Кишенько Василь Дмитрович

Формула / Реферат
Адаптивна система багатопараметричного регулювання, що складається з об'єкта регулювання, датчиків, виконавчих механізмів, регулюючих органів, багатопараметричного пропорційно-інтегрально-диференціального регулятора, бази знань, яка відрізняється тим, що датчики послідовно з'єднані з ідентифікатором кардинальних відхилень, нейронно-нечітким аналізатором кластерів і базою знань, вихід якої під'єднаний до блока формування параметрів регулятора.
Текст
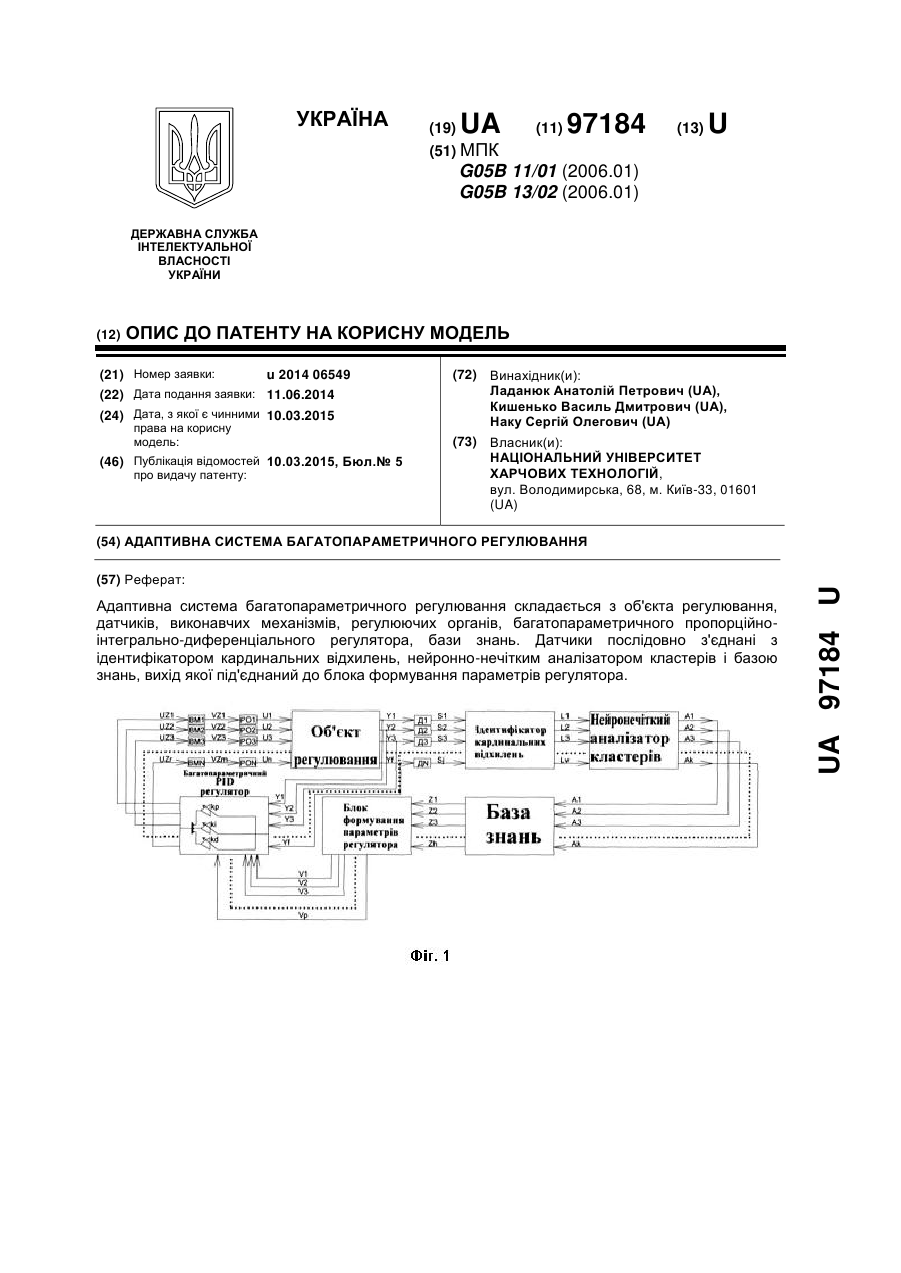
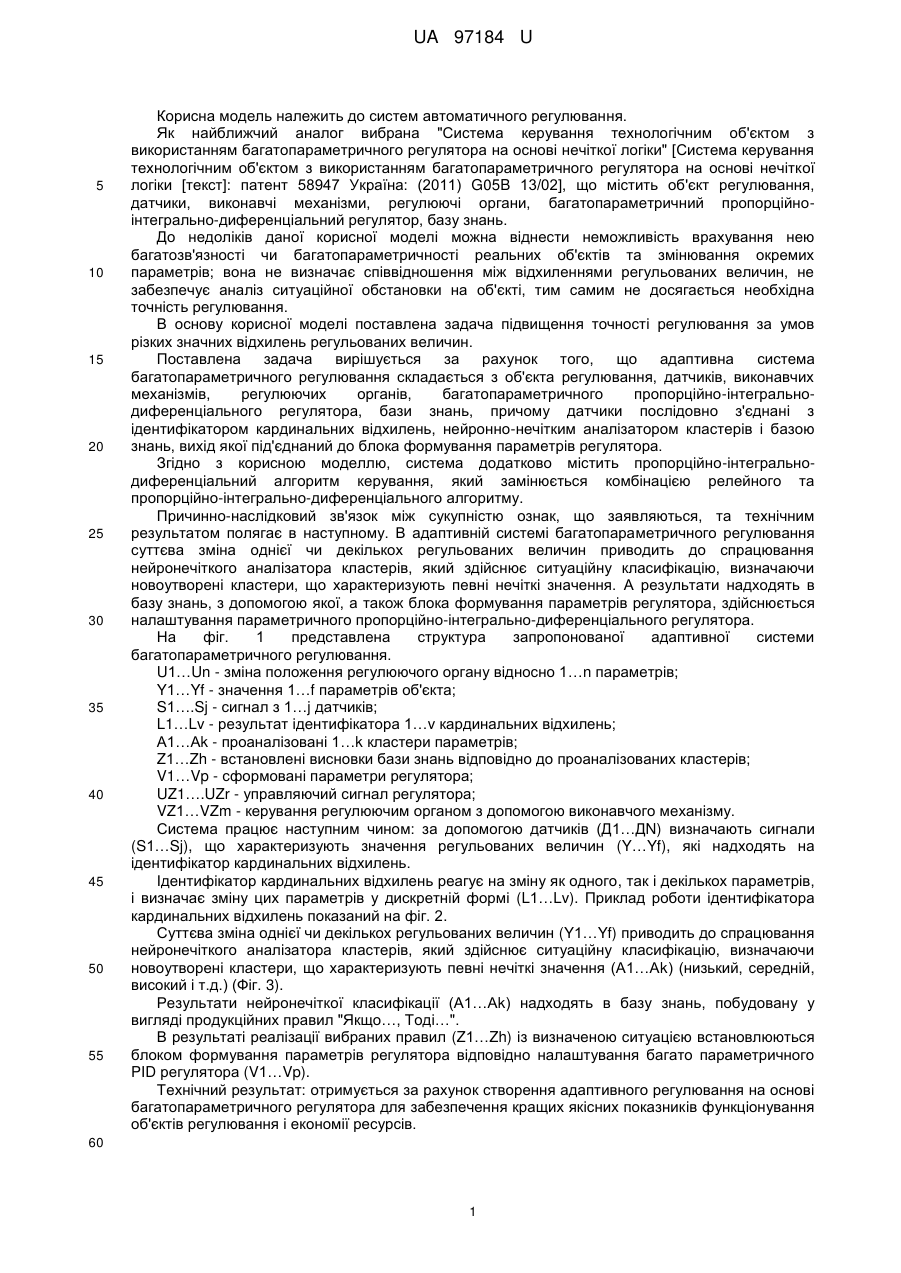
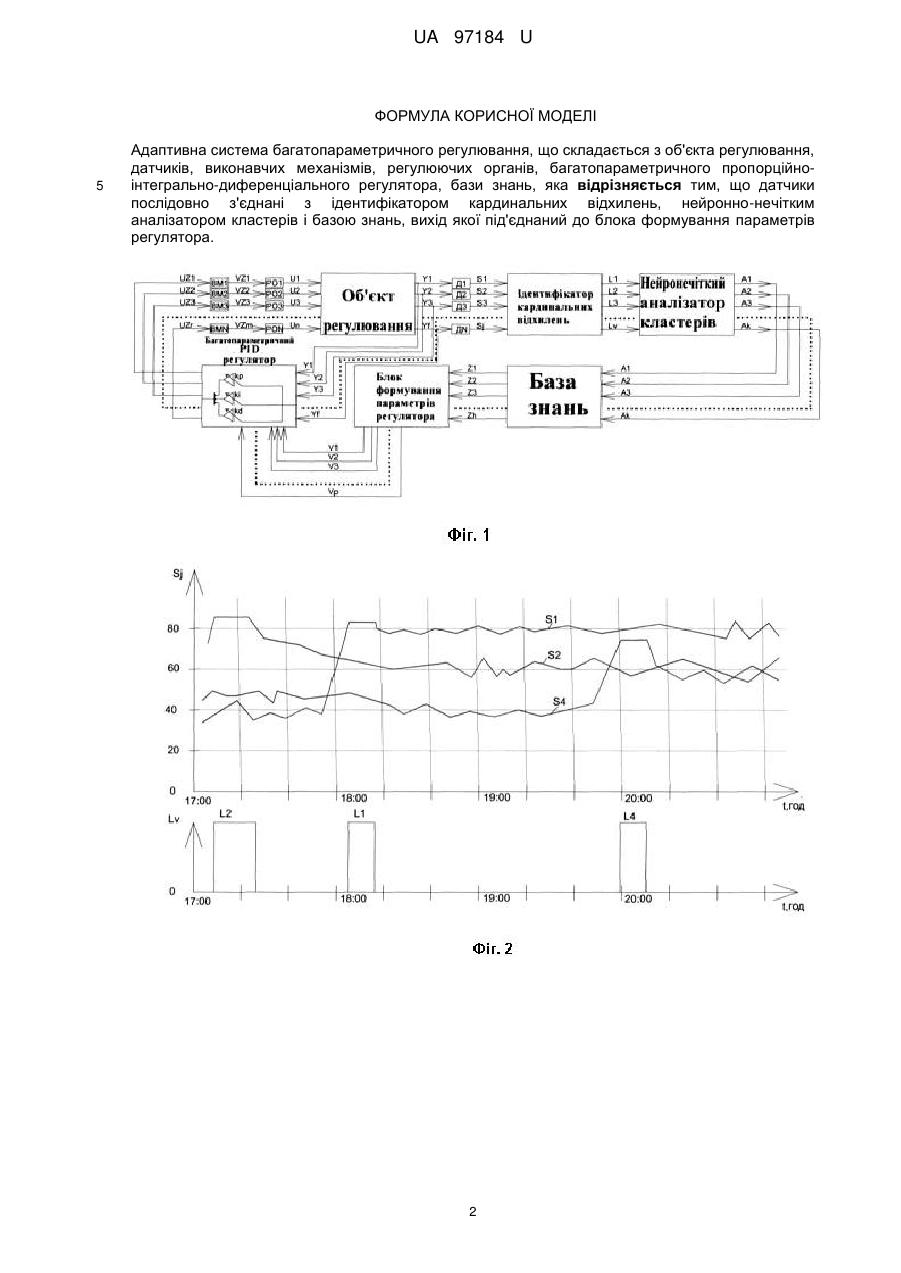
Реферат: Адаптивна система багатопараметричного регулювання складається з об'єкта регулювання, датчиків, виконавчих механізмів, регулюючих органів, багатопараметричного пропорційноінтегрально-диференціального регулятора, бази знань. Датчики послідовно з'єднані з ідентифікатором кардинальних відхилень, нейронно-нечітким аналізатором кластерів і базою знань, вихід якої під'єднаний до блока формування параметрів регулятора. UA 97184 U (54) АДАПТИВНА СИСТЕМА БАГАТОПАРАМЕТРИЧНОГО РЕГУЛЮВАННЯ UA 97184 U UA 97184 U 5 10 15 20 25 30 35 40 45 50 55 Корисна модель належить до систем автоматичного регулювання. Як найближчий аналог вибрана "Система керування технологічним об'єктом з використанням багатопараметричного регулятора на основі нечіткої логіки" [Система керування технологічним об'єктом з використанням багатопараметричного регулятора на основі нечіткої логіки [текст]: патент 58947 Україна: (2011) G05B 13/02], що містить об'єкт регулювання, датчики, виконавчі механізми, регулюючі органи, багатопараметричний пропорційноінтегрально-диференціальний регулятор, базу знань. До недоліків даної корисної моделі можна віднести неможливість врахування нею багатозв'язності чи багатопараметричності реальних об'єктів та змінювання окремих параметрів; вона не визначає співвідношення між відхиленнями регульованих величин, не забезпечує аналіз ситуаційної обстановки на об'єкті, тим самим не досягається необхідна точність регулювання. В основу корисної моделі поставлена задача підвищення точності регулювання за умов різких значних відхилень регульованих величин. Поставлена задача вирішується за рахунок того, що адаптивна система багатопараметричного регулювання складається з об'єкта регулювання, датчиків, виконавчих механізмів, регулюючих органів, багатопараметричного пропорційно-інтегральнодиференціального регулятора, бази знань, причому датчики послідовно з'єднані з ідентифікатором кардинальних відхилень, нейронно-нечітким аналізатором кластерів і базою знань, вихід якої під'єднаний до блока формування параметрів регулятора. Згідно з корисною моделлю, система додатково містить пропорційно-інтегральнодиференціальний алгоритм керування, який замінюється комбінацією релейного та пропорційно-інтегрально-диференціального алгоритму. Причинно-наслідковий зв'язок між сукупністю ознак, що заявляються, та технічним результатом полягає в наступному. В адаптивній системі багатопараметричного регулювання суттєва зміна однієї чи декількох регульованих величин приводить до спрацювання нейронечіткого аналізатора кластерів, який здійснює ситуаційну класифікацію, визначаючи новоутворені кластери, що характеризують певні нечіткі значення. А результати надходять в базу знань, з допомогою якої, а також блока формування параметрів регулятора, здійснюється налаштування параметричного пропорційно-інтегрально-диференціального регулятора. На фіг. 1 представлена структура запропонованої адаптивної системи багатопараметричного регулювання. U1…Un - зміна положення регулюючого органу відносно 1…n параметрів; Y1…Yf - значення 1…f параметрів об'єкта; S1….Sj - сигнал з 1…j датчиків; L1…Lv - результат ідентифікатора 1…v кардинальних відхилень; А1…Аk - проаналізовані 1…k кластери параметрів; Z1…Zh - встановлені висновки бази знань відповідно до проаналізованих кластерів; V1…Vp - сформовані параметри регулятора; UZ1….UZr - управляючий сигнал регулятора; VZ1…VZm - керування регулюючим органом з допомогою виконавчого механізму. Система працює наступним чином: за допомогою датчиків (Д1…ДN) визначають сигнали (S1…Sj), що характеризують значення регульованих величин (Y…Yf), які надходять на ідентифікатор кардинальних відхилень. Ідентифікатор кардинальних відхилень реагує на зміну як одного, так і декількох параметрів, і визначає зміну цих параметрів у дискретній формі (L1…Lv). Приклад роботи ідентифікатора кардинальних відхилень показаний на фіг. 2. Суттєва зміна однієї чи декількох регульованих величин (Y1…Yf) приводить до спрацювання нейронечіткого аналізатора кластерів, який здійснює ситуаційну класифікацію, визначаючи новоутворені кластери, що характеризують певні нечіткі значення (А1…Аk) (низький, середній, високий і т.д.) (Фіг. 3). Результати нейронечіткої класифікації (А1…Аk) надходять в базу знань, побудовану у вигляді продукційних правил "Якщо…, Тоді…". В результаті реалізації вибраних правил (Z1…Zh) із визначеною ситуацією встановлюються блоком формування параметрів регулятора відповідно налаштування багато параметричного PID регулятора (V1…Vp). Технічний результат: отримується за рахунок створення адаптивного регулювання на основі багатопараметричного регулятора для забезпечення кращих якісних показників функціонування об'єктів регулювання і економії ресурсів. 60 1 UA 97184 U ФОРМУЛА КОРИСНОЇ МОДЕЛІ 5 Адаптивна система багатопараметричного регулювання, що складається з об'єкта регулювання, датчиків, виконавчих механізмів, регулюючих органів, багатопараметричного пропорційноінтегрально-диференціального регулятора, бази знань, яка відрізняється тим, що датчики послідовно з'єднані з ідентифікатором кардинальних відхилень, нейронно-нечітким аналізатором кластерів і базою знань, вихід якої під'єднаний до блока формування параметрів регулятора. 2 UA 97184 U Комп’ютерна верстка Г. Паяльніков Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
Автори англійськоюLadaniuk Anatolii Petrovych
Автори російськоюЛаданюк Анатолий Петрович
МПК / Мітки
МПК: G05B 11/01, G05B 13/02
Мітки: система, багатопараметричного, адаптивна, регулювання
Код посилання
<a href="https://ua.patents.su/5-97184-adaptivna-sistema-bagatoparametrichnogo-regulyuvannya.html" target="_blank" rel="follow" title="База патентів України">Адаптивна система багатопараметричного регулювання</a>
Система керування технологічним об’єктом з використанням багатопараметричного регулятора на основі нечіткої логіки
Номер патенту: 58947
Опубліковано: 26.04.2011
Автори: Кроніковський Дмитро Олегович, Ладанюк Анатолій Петрович
МПК: G05B 11/01, G05B 13/02
Мітки: регулятора, основі, технологічним, об'єктом, багатопараметричного, використанням, логіки, керування, система, нечіткої
Формула / Реферат:
Система керування технологічним об'єктом з використанням багатопараметричного регулятора на основі нечіткої логіки, що містить об'єкт керування, датчики, регулюючі органи, виконавчі механізми, пропорційно-інтегрально-диференційний регулятор, яка відрізняється тим, що пропорційно-інтегрально-диференційний регулятор додатково містить похідні другого та третього порядку, а система додатково містить блок нечіткої логіки, який в свою чергу...
Адаптивна система управління швидкістю обертання турбіни
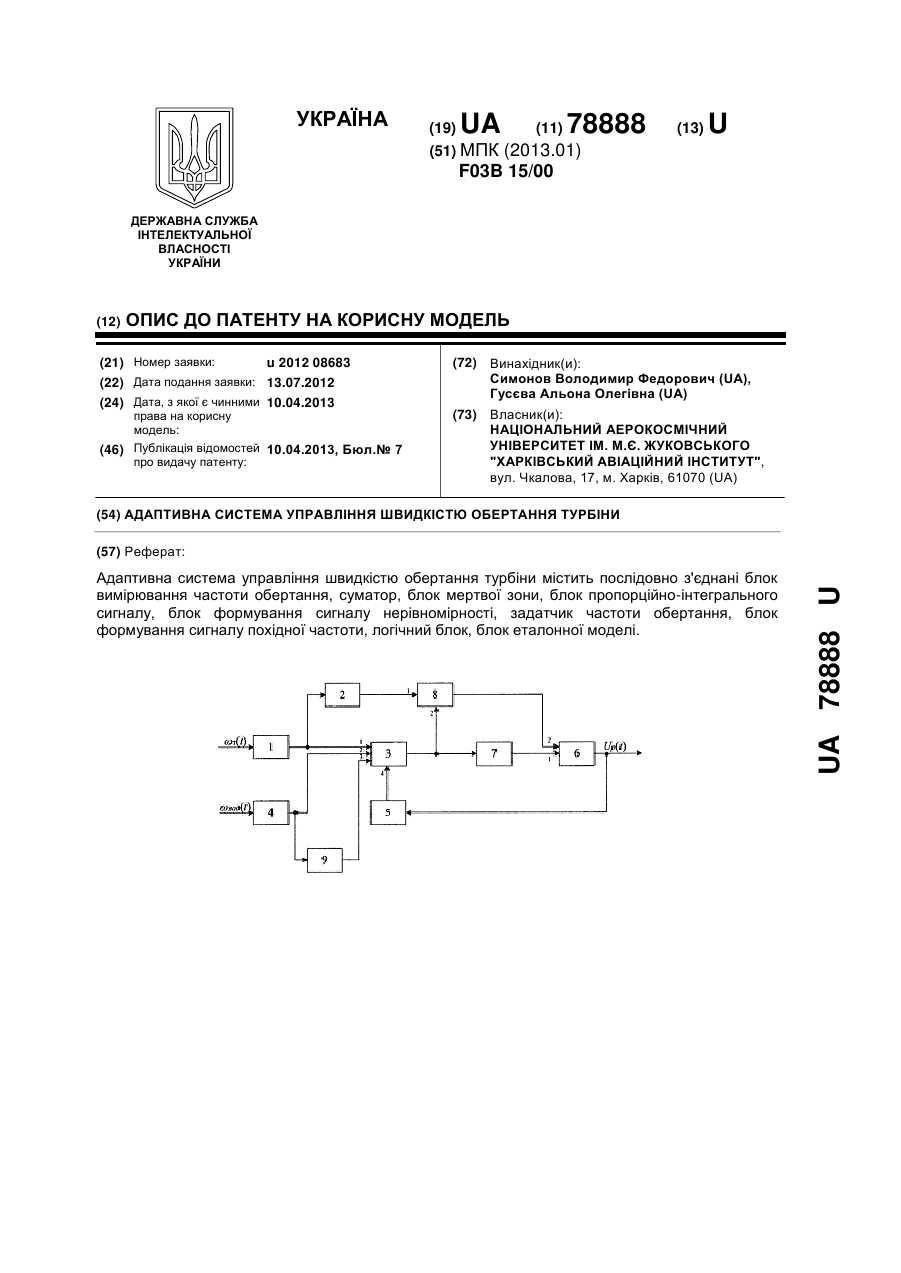
Номер патенту: 78888
Опубліковано: 10.04.2013
Автори: Гусєва Альона Олегівна, Симонов Володимир Федорович
МПК: F03B 15/00
Мітки: обертання, турбіни, управління, система, швидкістю, адаптивна
Формула / Реферат:
Адаптивна система управління швидкістю обертання турбіни, що містить послідовно з'єднані блок вимірювання частоти обертання, суматор, блок мертвої зони, блок пропорційно-інтегрального сигналу, блок формування сигналу нерівномірності, вихід якого з'єднаний з четвертим входом суматора, а також задатчик частоти обертання, вихід якого з'єднаний з другим входом суматора, блок формування сигналу похідної частоти, вхід якого з'єднаний з виходом...
Адаптивна система керування
Номер патенту: 26903
Опубліковано: 10.10.2007
Автори: Мирна Олена Володимирівна, Гавриленко Олег Іванович, Сиротська Ольга Олександрівна, Тарасенко Олексій Володимирович
МПК: G05B 13/02
Мітки: система, адаптивна, керування
Формула / Реферат:
Адаптивна система керування, що містить адаптивний регулятор, який складається з трьох суматорів, перший суматор з'єднаний паралельно з інтегратором і диференціатором і послідовно з другим суматором; виходи інтегратора і диференціатора з'єднані з другим суматором, який послідовно з'єднаний із блоком множення, яка відрізняється тим, що в систему введений датчик збурювальної дії, з'єднаний із третім суматором, вихід якого з'єднаний із першим...
Адаптивна система керування
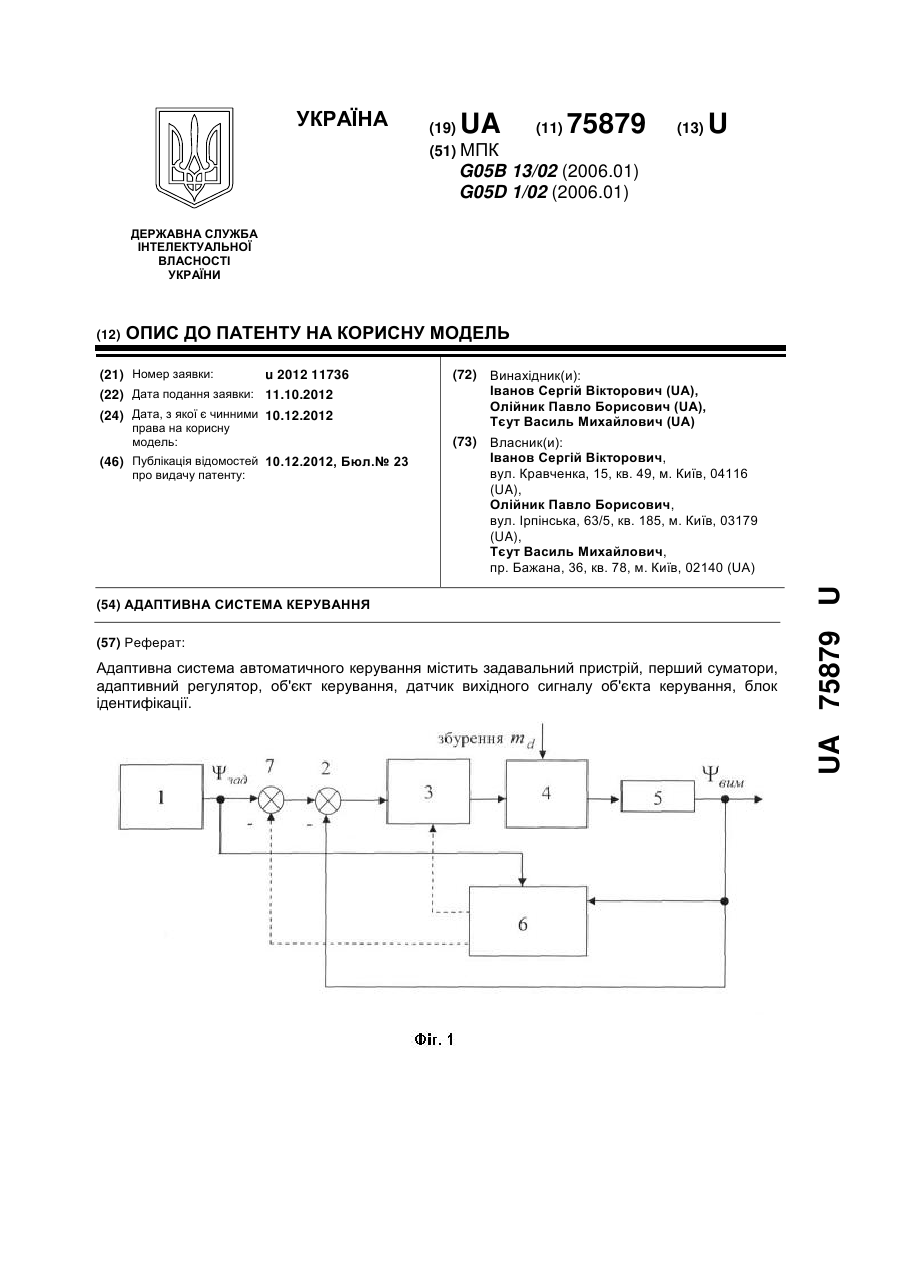
Номер патенту: 75879
Опубліковано: 10.12.2012
Автори: Олійник Павло Борисович, Іванов Сергій Вікторович, Тєут Василь Михайлович
МПК: G05B 13/02, G05D 1/02
Мітки: система, адаптивна, керування
Формула / Реферат:
Адаптивна система автоматичного керування, що містить задавальний пристрій, перший суматор, до виходу якого підключено адаптивний регулятор, вихід регулятора приєднано до першого входу об'єкта керування, на який діє збурення і з яким послідовно з'єднано датчик вихідного сигналу об'єкта керування, вихід датчика вихідного сигналу приєднано до інверсного входу першого суматора, яка відрізняється тим, що містить другий суматор, неінвертуючий...
Адаптивна система стабілізації космічного літального апарата
Номер патенту: 45233
Опубліковано: 26.10.2009
Автори: Бандура Іван Миколайович, Вировець Аліна Володимирівна
МПК: B64G 1/24
Мітки: адаптивна, стабілізації, апарата, літального, космічного, система
Формула / Реферат:
Адаптивна система стабілізації космічного літального апарата, яка має датчик кута, вихід якого під'єднаний до першого входу блока керування, датчик кутової швидкості, вихід якого під'єднаний до другого входу блока керування, а вихід блока керування через блок підсилювачів потужності підключений до релейних виконавчих органів, яка відрізняється тим, що в неї введені блок визначення збурюючого моменту, вихід якого під'єднаний до четвертого...
Попередній патент: Пристрій для подрібнення полімерних матеріалів
Наступний патент: Ікра з моркви вітамінізована
Випадковий патент: Спосіб виготовлення гістологічних препаратів овоцитів і зигот ранніх стадій розвитку